

- مقاله
- دسترسی آزاد
- منتشر شده:
چارچوبی برای تخمین سهم انسانساختی سطح آب قطب جنوب در یک محیط مصنوعی
ارتباطات زمین و محیط زیست حجم ۵ ، شماره مقاله: ۱۲۱ ( ۲۰۲۴ )
چکیده
سهم نسبی تغییرات اقلیمی ناشی از فعالیتهای انسانی و تغییرپذیری داخلی در افزایش سطح دریا از صفحه یخی غرب قطب جنوب هنوز مشخص نشده است. حتی نحوه پرداختن به این سوال هنوز مشخص نیست، زیرا این دو از طریق بازخوردهای یخ-اقیانوس به هم مرتبط هستند و با استفاده از مدلهای صفحه یخی با عدم قطعیت قابل توجه بررسی میشوند. در اینجا ما نشان میدهیم که چگونه میتوان سهم نسبی آنها را با شبیهسازی عقبنشینی یک مجموعه یخ مصنوعی با استفاده از یک مدل صفحه یخی ارزیابی کرد. با استفاده از یک رویکرد بیزی، توزیعهای افزایش سطح دریا مرتبط با این عقبنشینی را ایجاد میکنیم. ما نشان میدهیم که لازم است هر دو عدم قطعیت ناشی از پارامتر مدل با محدودیت ضعیف و تغییرات تصادفی در نیروی اقلیمی را در نظر بگیریم و توزیعهای ما از افزایش سطح دریا شامل این دو است. این منابع عدم قطعیت قبلاً فقط به صورت جداگانه در نظر گرفته شدهاند. ما اثرات مشخصه تغییرات اقلیمی بر توزیعهای افزایش سطح دریا را در این مجموعه شناسایی میکنیم، به ویژه اینکه تغییرات اقلیمی هم میانه و هم وزن در دنبالههای توزیعها را افزایش میدهد. از این یافتهها، معیارهایی را میسازیم که نقش تغییرات اقلیمی را در افزایش سطح دریا در گذشته و آینده کمّی میکنند، که نشان میدهد نسبت دادن آن حتی برای صفحات یخی دریایی ناپایدار نیز امکانپذیر است.
محتوای مشابه توسط دیگران مشاهده میشود

مقدمه
صفحه یخی غرب قطب جنوب (WAIS) در طول دوران ماهوارهها دستخوش تغییرات چشمگیری شده است که با شتاب گرفتن یخ ۱ ، نازک شدن ۲ ، عقبنشینی ۳ و از دست دادن یخ ۴ مشخص میشود . WAIS در حال حاضر تقریباً ۱۰٪ از افزایش سطح آب دریاهای جهان (SLR) را تشکیل میدهد ۵ ، ۶ و میتواند در دهههای آینده دهها سانتیمتر به آن اضافه کند و احتمالاً تا پایان قرن حاضر بر آن مسلط شود ۷. با این حال، با وجود اینکه از نمادهای کلیدی تغییرات اقلیمی ناشی از فعالیتهای انسانی هستند ۸ ، ۹ ، از دست دادن یخهای قطب جنوب و در نتیجه سهم SLR مرتبط با آن، هنوز به طور رسمی به تغییرات اقلیمی ناشی از فعالیتهای انسانی ۱۰ نسبت داده نشده است .
به دلیل تنوع داخلی قوی در آب و هوای منطقه و همچنین بازخوردهای یخ-اقیانوس که باعث تداوم از دست رفتن یخ میشوند، هنوز رابطه علی قوی بین از دست دادن یخ WAIS و تغییرات اقلیمی ناشی از فعالیتهای انسانی برقرار نشده است . ۱۰ شواهد متعددی وجود دارد که برهمکنش پیچیده آنها را برجسته میکند. در حالی که عقبنشینی WAIS در دهه ۱۹۴۰ آغاز شد ، ۱۱ ، ۱۲ ، ۱۳ ، پس از یک دوره سکون تقریباً ۱۰۰۰۰ ساله، ۱۴ ، تأثیر فعالیتهای انسانی بر محرکهای کلیدی اقلیمی در منطقه تنها در دهه ۱۹۶۰ قابل توجه شد . ۱۵٫ این نشان میدهد که محرک عقبنشینی حتی بدون نیروی انسانی نیز رخ داده است. پس از شروع آن، عقبنشینی WAIS احتمالاً توسط بازخوردهای یخ-اقیانوس پایدار مانده است. ۱۶ ، ۱۷ ، ۱۸ ، ۱۹ ، ۲۰ ، ۲۱ (شکل ۱ ). نکته قابل توجه این است که عقبنشینی این صفحه یخی دریایی در امتداد یک بستر قهقرایی (با شیب رو به بالا در جهت جریان) با افزایش شار یخ در امتداد خط اتصال به زمین (جایی که یخ از حالت نشسته روی سنگ بستر به یک صفحه یخی شناور تبدیل میشود) مرتبط است، که باعث عقبنشینی بیشتر میشود ۲۲ ، ۲۳ (شکل ۱ ). بنابراین، یک احتمال این است که از دست دادن مداوم یخ به طور طبیعی در دهه ۱۹۴۰ آغاز شده باشد و عقبنشینی تحت تأثیر بازخوردهای خود-تداومبخش باشد که در مقیاسهای زمانی طولانی که صفحات یخی تکامل مییابند، ادامه مییابد ۱۱ ، ۱۳ ، ۱۵ ، ۲۴٫ با این حال، این عقبنشینی نمیتواند کاملاً خود-پایدار و مستقل از نیروی خارجی باشد، زیرا تخلیه یخ همچنان به تغییرات اقیانوسی واکنش نشان میدهد ۲۵ ، ۲۶ ، ۲۷ . این تصویر با گرمایش پیشنهادی در مقیاس صد ساله دریای آموندسن ۲۴ ، ۲۸ ، که تا حدودی به تغییرات انسانی در سیستمهای اقلیمی در مقیاس بزرگ نسبت داده میشود ۱۵ ، ۲۸ ، ۲۹ ، ۳۰ ، پیچیدهتر میشود . در حالی که همه این فرآیندها ممکن است در از دست دادن مداوم یخ نقش داشته باشند، سهم نسبی یک محرک تاریخی، بازخوردهای یخ-اقیانوس و تغییرات در نیروهای اقلیمی هنوز ناشناخته است.

نمودار شماتیک نشان میدهد که چگونه یک پیکربندی صفحه یخی که تحت تأثیر نیرو، شامل تغییرات اقلیمی ناشی از فعالیتهای انسانی (نارنجی) پایدار میماند، ممکن است تحت تأثیر یک واقعیت متفاوت و خلاف واقع از نیرو بدون هیچ تغییر اقلیمی ناشی از فعالیتهای انسانی (سبز)، عقبنشینی ناگهانی را تجربه کند. در نتیجه، عقبنشینی خط اتصال زمین (نقاط پر شده در پیکربندیهای قفسه یخی) و SLR در حالت خلاف واقع بسیار بیشتر است. پس از شروع (مثلاً در ستاره)، عقبنشینی از یک ارتفاع توپوگرافی توسط بازخوردهای یخ-اقیانوس حفظ میشود.
تعیین نقش تغییرات اقلیمی ناشی از فعالیتهای انسانی در SLR از WAIS برای ارائه شواهد علّی برای پشتیبانی از راهحلها برای اثرات بیشمار اجتماعی (مثلاً مرجع ۳۱ )، اقتصادی (مثلاً مرجع ۳۲ ) و اکولوژیکی (مثلاً مرجع ۳۳ ) SLR که عمدتاً توسط کشورهای جزیرهای فقیرتر و کمارتفاع متحمل میشوند، مهم است . ۳۴٫ این امر به ویژه با توجه به نتایج اخیر کنفرانس COP27، که در آن یک صندوق خسارت و زیان برای جبران خسارات وارده به کشورها توسط تغییرات اقلیمی ناشی از فعالیتهای انسانی تأسیس شد، اهمیت دارد. علاوه بر این، انتساب (یا عدم انتساب) پیامدهایی برای آینده WAIS دارد: اگر کاهش یخ مشاهده شده صرفاً به دلیل تغییرپذیری داخلی و بازخوردهای یخ-اقیانوس باشد، SLR احتمالاً از قبل متعهد و برگشتناپذیر است. در حالی که، یک مؤلفه انسانی قابل توجه ممکن است نشان دهد که سهم مداوم آن به شدت به انتشار گازهای گلخانهای در آینده بستگی دارد.
علیرغم اهمیت این سوال، هنوز طرح کلی چگونگی پرداختن به آن مشخص نیست. پیشرفتهایی در این زمینه توسط مرجع ۳۵ حاصل شده است ، که با استفاده از یک مدل تکبعدی صفحه یخ، چگونگی نسبت دادن عقبنشینی صفحه یخی از یک ارتفاع توپوگرافی محلی تحت نیروی متغیر را بررسی کردند. آنها با استفاده از یک آستانه عقبنشینی تعیینشده به عنوان رویدادی که باید شناسایی شود، نشان دادند که اگرچه مشاهده عقبنشینی بزرگ تحت یک تحقق واحد از نیروی اقلیمی تصادفی لزوماً نشان نمیدهد که تغییرات اقلیمی انسانی در این نیرو وجود داشته است (شکل ۱ )، حتی روندهای انسانی متوسط در نیرو، عقبنشینی را در صورت میانگینگیری در چندین تحقق، محتملتر میکند. آنها نتیجه میگیرند که اگر قرار است اظهارات انتساب قوی ارائه شود، باید یک رویکرد احتمالی، با چندین تحقق نیرو، اتخاذ شود. علاوه بر این، آنها نشان دادند که انتخاب پارامترهای مدل تأثیر زیادی بر احتمال عقبنشینی و در نتیجه بیانیه انتساب دارد. این نشان میدهد که پارامترهای مدل متعدد باید به طور همزمان در ارزیابی انتساب در نظر گرفته شوند، به ویژه هنگامی که این پارامترها به طور ضعیفی محدود شدهاند.
در اینجا، ما بررسی میکنیم که چگونه میتوان مؤلفه انسانی سهم SLR از WAIS را تعیین کرد، که از یک رویکرد بیزی با ادغام چندین تحقق نیرو استفاده میکند. ما بر اساس مرجع ۳۵ به دو روش اصلی عمل میکنیم: اولاً، ما سهم SLR را به جای عقبنشینی، به عنوان معیاری که باید نسبت داده شود، در نظر میگیریم. با استفاده از SLR به عنوان معیار انتساب، میتوانیم نقش تغییرات اقلیمی انسانی را برای SLR مشاهده شده در هر بازه زمانی، به جای فقط تجاوز از یک آستانه عقبنشینی از پیش تعریف شده، کمّی کنیم. این امر مشکل تعریف رویداد مشترک را که معمولاً بر مطالعات انتساب تأثیر میگذارد، کاهش میدهد ۳۶. ثانیاً، ما به صراحت نقش پارامترهای مدل متغیر را در ارزیابی انتساب در نظر میگیریم. رویکردهای بیزی به طور طبیعی اجازه میدهند چگالی احتمال مشترک پارامترهای مدل چندگانه، که ممکن است به طور کلی به طور ضعیفی محدود شوند، در یک پیشبینی SLR ۳۷ نمایش داده شود . این امر از نیاز به تعیین مقادیر دقیق پارامترهای مدل در ابتدا، که نتایج انتساب بسیار متفاوتی را بسته به انتخاب خاص پارامترها در چارچوب مرجع ۳۵ به همراه دارد، جلوگیری میکند .
به طور خاصتر، ما تغییرپذیری پارامتر را در پارامترسازی ذوب پایه یخی در نظر میگیریم، که با مقایسه میدانهای نرخ ذوب پایه یخی حاصل با خروجی از یک مدل اقیانوسی دقیقتر کالیبره میشود. این روش یک رویکرد ترکیبی را نشان میدهد که بین پارامترسازی مدلهای ذوب پایه و مدلهای جفتشده یخ-اقیانوس قرار میگیرد و ذوب را به طور مستقیم کالیبره میکند، نه فقط به طور غیرمستقیم از طریق تأثیر آن بر جریان یخ. ما نشان میدهیم که چگونه میتوان مؤلفه انسانی مشارکتهای SLR را با در نظر گرفتن عقبنشینی یک صفحه یخی مصنوعی دریایی که به شدت مستعد بازخوردهای یخ-اقیانوس است و در معرض نیرویی با تغییرپذیری داخلی قوی قرار دارد، تعیین کرد، ویژگیهای مشخصی که تصور میشود سیگنالهای تغییرات اقلیمی انسانی را در مشارکتهای SLR از WAIS پنهان میکنند. ما نشان میدهیم که چگونه عدم قطعیتهای مرتبط با پارامترهای مدل با محدودیت ضعیف با عدم قطعیتهای مرتبط با نیروی تصادفی آب و هوا تعامل دارند و مشخص میکنند که در نظر گرفتن هر دو ضروری است، ویژگیای که در پیشبینیهای فعلی SLR وجود ندارد. تا آنجا که ما میدانیم، این اولین باری است که چنین عدم قطعیتهایی به طور همزمان در یک تمرین مدلسازی صفحه یخی در نظر گرفته شدهاند.
ما به طور صریح توزیعهایی از SLR را میسازیم که به طور همزمان عدم قطعیت پارامتری (ناشی از پارامترهای مدل با محدودیت ضعیف) و عدم قطعیت تصادفی (ناشی از پاسخ متغیر یک صفحه یخی به تحققهای مختلف نیروی تصادفی) را در نظر میگیرند. این توزیعها همچنین نشانههای مشخصی از نیروی انسانی را بر توزیعهای SLR از صفحات یخی دریایی نشان میدهند که ما آنها را توصیف میکنیم و به ما امکان میدهند معیاری بسازیم که تأثیر نیروی انسانی بر SLR را در این سیستم توصیف کند. ما نتیجه میگیریم که حتی در صفحات یخی دریایی بسیار ناپایدار، تأثیر نیروی انسانی در اصل قابل تشخیص است، با توجه به گروههای شبیهسازی به اندازه کافی بزرگ و همچنین بررسی کامل عدم قطعیت پارامتر مدل. ما با بحث مختصری در مورد چالشهای مرتبط با تعیین نقش نیروی انسانی بر سهم SLR از WAIS، که در استفاده ما از یک پیکربندی مصنوعی از آنها اجتناب میشود، کار را به پایان میرسانیم. این موارد شامل عدم قطعیت در سایر پارامترهای مدل، عدم قطعیت در حالت اولیه و عدم قطعیت در نیروی اقلیمی است.
نتایج
تعاملات بین عدم قطعیتهای تصادفی و پارامتری در پیشبینیهای افزایش سطح دریا
ما یک رویکرد بیزی را اتخاذ میکنیم که در آن عدم قطعیتهای پارامتری و تصادفی به طور همزمان در نظر گرفته میشوند. طبق استاندارد، عدم قطعیت پارامتری با انجام شبیهسازیهای متعدد با پارامترهای مدل مختلف که فضای پارامتر را پوشش میدهند (برای هر تحقق نیرو) در نظر گرفته میشود، و سهم SLR حاصل بر اساس سطح توافق بین یک کمیت شبیهسازی شده و حقیقت پایه آن وزندهی میشود، به عنوان مثال، مراجع ۳۸ ، ۳۹ ، ۴۰ ، ۴۱ ، ۴۲ ، ۴۳٫ گنجاندن عدم قطعیت تصادفی در چنین رویکردی (به بخش روشها مراجعه کنید) با قرار دادن هیچ ترجیحی بر تحقق خاص نیرو، ساده است. اگرچه در نظر گرفتن عدم قطعیت پارامتری به این روش اکنون استاندارد است، اما هنوز هیچ مطالعهای تعامل بین عدم قطعیتهای پارامتری و تصادفی نیرو را بررسی نکرده است، در درجه اول به دلیل هزینه محاسباتی انجام این کار ۴۰ ، زیرا شبیهسازیهای متعدد با پارامترهای مدل مختلف باید برای هر تحقق اضافی نیرو اجرا شود.
برای نشان دادن این رویکرد، ما بر عدم قطعیت پارامتری ناشی از استفاده از پارامتریسازی ذوب پایه یخی تمرکز میکنیم. پارامتریسازی ذوب پایه اغلب به جای مدلهای اقیانوس یخی جفتشده برای کاهش هزینه محاسباتی استفاده میشود (در مدلهای اقیانوس یخی جفتشده، مؤلفه اقیانوس معمولاً بخش عمدهای از هزینه را نشان میدهد ۴۴ ). مدلهای اقیانوس یخی جفتشده برای مجموعههای بزرگ شبیهسازیها ۴۴ که برای گنجاندن عدم قطعیت تصادفی و پارامتری مورد نیاز هستند، از نظر محاسباتی غیرقابل حل باقی میمانند. با این حال، پارامتریسازی فرآیندهای غفلت از ذوب که در تعیین ذوب پایه مهم نشان داده شدهاند (به عنوان مثال، مراجع ۱۶ ، ۴۵ ، ۴۶ ) و شبیهسازیهایی که از پارامتریسازی استفاده میکنند، نشان داده شده است که نرخهای ذوب پایه را به دست میدهند که منجر به مهارت ضعیف در بازتولید عقبنشینی خط اتصال زمین مشاهدهشده ۴۷ و از دست دادن یخ ۴۸ ، ۴۹ ، ۵۰ ، در مقایسه با مدلهای اقیانوس یخی جفتشده میشود. رویکرد ما را میتوان ترکیبی بین پارامتریسازی ذوب و یک مدل جفتشده یخ-اقیانوس در نظر گرفت: ما از پارامتریسازی ذوب پایه برای کارایی محاسباتی استفاده میکنیم و یک رویکرد بیزی را برای پارامترهای مدل در نظر میگیریم: شبیهسازیها با مقایسه پیشبینیهای آنها از نرخ ذوب پایه با پیشبینیهای یک مدل اقیانوس آفلاین در زمانهای مختلف لحظهای در طول شبیهسازی وزندهی میشوند (روشها)؛ بنابراین، مدل اقیانوس نقشی مشابه یک حقیقت زمینی در یک بهروزرسانی سنتی بیزی ایفا میکند، یعنی اطلاعاتی است که در مدل جذب میشود. لازم به ذکر است که این یک فلسفه کمی متفاوت با یک بهروزرسانی بیزی معمولی در مدلسازی صفحات یخی است که در آن معمولاً از توافق با مشاهدات ماهوارهای، به جای نتایج مدلهای دقیقتر، برای بهروزرسانی احتمالات استفاده میشود. ما از یک پارامتریسازی نرخ ذوب رایج استفاده میکنیم که در آن ذوب وابستگی درجه دوم به دمای اقیانوس دارد و به صورت خطی با یک پارامتر بدون بعد M مقیاسبندی میشود که مستقل از دمای اقیانوس است (روشها). روش کالیبراسیون نرخ ذوب فقط قادر به کالیبره کردن جنبههای ذوب مدل جریان است. پارامترهای دیگر، مانند پارامترهای مربوط به لغزش پایه و ویسکوزیته یخ، که در تعیین جریان یخ (و بنابراین SLR) مهم هستند، کالیبره نشدهاند. مطالعات دیگر (به عنوان مثال، مراجع ۳۸ ، ۳۹ ، ۴۰ ، ۴۱ ، ۴۲ ، ۴۳)) رویههایی را برای کالیبره کردن بسیاری از این جنبههای مدلهای پهنه یخی با استفاده از دادههای مشاهدهای ایجاد کردهاند؛ نوآوری روش کالیبراسیون ما این است که امکان کالیبراسیون دقیق نرخهای ذوب پایه را فراهم میکند، که تا آنجا که ما میدانیم، قبلاً فقط به طور غیرمستقیم از طریق تأثیر ذوب بر جریان یخ کالیبره شده بودند. در عمل، تمام پارامترهایی که تأثیر مهمی بر دینامیک یخ دارند باید کالیبره شوند (به «بحث» مراجعه کنید)، اما استفاده ما از یک پیکربندی عمومی پهنه یخی (که در زیر توضیح داده شده است) به ما این امکان را میدهد که آنها را نادیده بگیریم و بر خطاهایی که صرفاً از مهارت ضعیف در پارامترسازی نرخ ذوب ناشی میشوند، تمرکز کنیم.
پیکربندی نمونه ما شامل یک برآمدگی برجسته در بستر دریا (شکل ۲a ) است که در آن، قفسه یخی در طول مرحله اولیه با نیروی اقیانوسی ثابت زمانی، مطابق با شرایط معمول در دریای آموندسن از WAIS (روشها)، به طور پایدار به زمین متصل شده است ( شکل ۲b ). این موقعیت خط اتصال به زمین، که در یک ارتفاع توپوگرافی قرار دارد، یادآور پیکربندی WAIS قبل از دهه ۱۹۴۰ است [۱۱] و سیستم را پس از شروع عقبنشینی خط اتصال به زمین، به بازخوردهای یخ-اقیانوس بسیار حساس میکند [۴۹] . ما تکامل از این حالت پایدار را تحت نیروی اقیانوسی متغیر در نظر میگیریم، که با تغییر عمق پیکنوکلاین در شرایط اقیانوس محیطی اعمال میشود (شکل ۲c، d ). نیروی اقیانوسی شامل یک مؤلفه تغییرپذیری داخلی تصادفی است که دامنه مشاهده شده ۵۱ ، ۵۲ و تداوم ۳۵ تغییرپذیری داخلی در شرایط اقیانوسی در دریای آموندسن را در مقیاسهای زمانی دههای و بین دههای تقلید میکند. بر این نیرو یا یک روند انسانی – یک کمعمق شدن خطی ۱۰۰ متر در قرن از پیکنوکلاین – که یک روند تاریخی محتمل ناشی از فعالیتهای انسانی را در شرایط دریای آموندسن نشان میدهد، افزوده میشود (۲۸ ، ۵۳) – یا هیچ روندی وجود ندارد، که نشاندهنده سناریوی خلاف واقع است که در آن هیچ تغییر اقلیمی ناشی از فعالیتهای انسانی رخ نداده است (شکل ۲g ). برای هر دوی این سناریوها (که به ترتیب به عنوان نیروی انسانی و خلاف واقع نامیده میشوند)، ما شبیهسازیهایی را با ۴۰ تحقق مستقل از نیرو انجام میدهیم (تحققها در هر یک از دو مجموعه نیز مستقل هستند). اگرچه نرخهای انباشت نیز دارای تنوع داخلی قابل توجه بین دههای هستند و پیشبینی میشود که در آینده یک روند انسانی را نشان دهند (۷) ، این تنوع کمتر از نیروی اقیانوسی برای WAIS است. علاوه بر این، تغییرات در ذوب، به جای انباشت، به عنوان محرک غالب عقبنشینی اخیر WAIS ۵۴ ، ۵۵ شناخته شده است و داشتن نیروهای چندگانه، هر کدام با یک روند انسانی منحصر به فرد، کار انتساب را تا حدودی پیچیده میکند.

الف) عمقسنجی (دادهشده توسط معادله ( ۷ )) از پیکربندی صفحه یخی دریایی. ب) ضخامت اولیه یخ در امتداد خط مرکزی خطچین در ( a ) برای M = ۱٫ خط خاکستری سطح دریا را نشان میدهد. دمای محیط T a ( c ) و شوری S a ( d ) که در پارامترسازی ذوب و به عنوان شرایط مرزی بازیابی در مدل اقیانوس (روشها) استفاده میشوند. P c نشان دهنده مرکز پیکنوکلاین است که پروفیلهای نیروی خطی تکهای را پارامتری میکند و برای تقلید از تغییرپذیری نوسان میکند. ه) تکامل زمانی یک تحقق واحد از نیروی وارده و ( f ) سهم SLR مربوطه برای مقادیر مختلف (M in \left\{0.5,\,0.75,\,1.0,\,1.25,\,1.5\right\}\) (فلش جهت افزایش M را نشان میدهد ). مناطق آبی و قرمز در ( e ) نشان میدهند که آیا نیروی وارده گرمتر (پیکنوکلاین کمعمقتر) یا سردتر (پیکنوکلاین عمیقتر) نسبت به مرحله کالیبراسیون است، که در آن P c = -۵۰۰ متر (خط افقی سیاه) است، و مناطق قرمز سایهدار نشان دهنده دو دوره گرم برجسته هستند. خط چین سیاه نشان دهنده روند انسانی ۱۰۰ متر در قرن در عمق پیکنوکلاین است. g تکامل زمانی مراکز پیکنوکلاین P c در تمام تحققهای نیروی وارده. در اینجا، منحنیهای نارنجی مربوط به سناریوهای نیروی وارده با روند انسانی کمعمق شدن پیکنوکلاین ۱۰۰ متر در قرن است، در حالی که منحنیهای سبز مربوط به یک سناریوی خلاف واقع هستند، بدون هیچ روندی در نیروی وارده (روشها). در هر دو مورد، منحنیهای کمرنگ نشاندهنده اعضای منفرد گروه هستند، در حالی که منحنیهای پر رنگ نشاندهنده میانگینهای گروه هستند و خطوط چیندار نشاندهنده روند تحمیلشده خارجی ( عبارت T ( { …
برای هر تحقق نیرو، ما شبیهسازیهایی را با نمونهبرداری از فضای پارامتری M انجام میدهیم . با توجه به اینکه قفسه یخی در طول مرحله اولیهسازی به طور پایدار در قله خط الراس قرار دارد و تحت نیرویی که مطابق با گرمترین شرایط مشاهده شده اعمال میشود، عقبنشینی میکند، ما را به در نظر گرفتن محدوده ۰٫۵ < M < 1.5 (روشها) محدود میکند. ما این محدوده را با در نظر گرفتن نمونهبرداری میکنیم . بنابراین، تعداد کل شبیهسازیها ۴۰۰ است (۲ گروه × ۴۰ عضو × ۵ مقدار M ).
بررسی پاسخ به یک تحقق توضیحی واحد از نیروی رانش (شکل ۲ e)، برای پارامترهای مختلف ذوب M ، تعامل بین نیروی رانش تصادفی و تغییرپذیری پارامتر را برجسته میکند و رابطهی ناگسستنی بین عدم قطعیت تصادفی و پارامتری را روشن میسازد. در مقیاس صد ساله، این تحقق نیرو شامل دو دورهی گرم برجسته است (شکل ۲ e). در طول اولین دورهی گرم (بین تقریباً t = ۲۰ و t = ۴۰ سال)، عقبنشینی در شبیهسازیهایی با بزرگترین مقادیر M آغاز میشود ( M = ۱، ۱٫۲۵، ۱٫۵؛ شکل ۲ f). این عقبنشینیها در اواخر اولین دورهی گرم آغاز میشوند (شکل ۲ f)، زمانی که ناهنجاری ذوب یکپارچه زمانی باعث نازک شدن کافی قفسهی یخی شده است تا تقویت قفسهی یخی را به سطحی که عقبنشینی در آن آغاز میشود، کاهش دهد. بر این اساس، عقبنشینی در شبیهسازی با بزرگترین پارامتر ذوب M (شکل ۲f ) که بالاترین نرخ ذوب را دارد و بنابراین ناهنجاری ذوب یکپارچهشده با زمان را با سرعت بیشتری تجمع میدهد، زودتر آغاز میشود. پس از شروع، عقبنشینی با نرخی تقریباً مستقل از نیروی وارده ادامه مییابد (شکل ۲f )، که نشان میدهد پس از شروع، عقبنشینی در درجه اول توسط بازخوردهای یخ-اقیانوس تنظیم میشود، اگرچه به تغییرات نیرو واکنش ضعیفی نشان میدهد. شبیهسازیها با M کوچکتر (ذوب پایینتر) در طول دوره گرم اول در قله خط الراس باقی میمانند. عقبنشینی در شبیهسازی M = ۰٫۷۵ در طول دوره گرم دوم، دوباره در اواخر دوره، آغاز میشود. یک شبیهسازی با همان تحقق نیرو اما با حذف روند انسانی و M = ۰٫۷۵، در این دوره عقبنشینی نمیکند (توجه داشته باشید که این شبیهسازی خارج از ساختار گروهی ذکر شده در بالا است، که در آن گروههای انسانی و خلاف واقع مستقل هستند): ناهنجاری ذوب یکپارچه مورد نیاز برای شروع عقبنشینی در یک دوره زمانی معین، در صورت وجود روند انسانی در نیرو، آسانتر از زمانی که چنین روندی وجود ندارد، حاصل میشود.
تحت همان تحقق نیرو، SLR ممکن است در M بسیار غیرخطی باشد (شکل ۲ h). به عنوان مثال، سهم SLR در منحنی برجسته شده در شکل ۲ h با افزایش پارامتر نرخ ذوب از M = ۱ به M = ۱٫۲۵، ۱۸۰۰٪ (از ۰٫۱۵ میلیمتر به ۲٫۹۱ میلیمتر پس از ۱۰۰ سال) افزایش مییابد. این حساسیت قوی، لزوم در نظر گرفتن طیف وسیعی از مقادیر پارامتر در تعیین سهم SLR را نشان میدهد، به ویژه هنگامی که سیستم مستعد بازخوردهای یخ-اقیانوس است، یا به اصطلاح ممکن است از نقاط اوج عبور کند. علاوه بر این، شبیهسازیهایی در مجموعه انسانساخت وجود دارد که SLR کمتری نسبت به شبیهسازیها در مجموعه خلاف واقع (شکل ۲ h) ارائه میدهند، و این رفتار به شدت تحت تأثیر مقدار M است . بنابراین، مشاهده SLR بالا تحت یک تحقق واحد نیرو لزوماً نشانهای از تأثیر قوی انسانساخت نیست (شکل ۱ ). روی هم رفته، این نتایج – حساسیت شدید به پارامتر M و به تحقق خاص اجبار – نشان میدهد که عدم قطعیت پارامتری و تصادفی باید همزمان در توزیعهای SLR و بنابراین هر چارچوبی که سعی در تعیین نقش روندهای انسانی در اجبار در آنها دارد، در نظر گرفته شود.
غیرخطی بودن SLR در M همچنین نشان میدهد که چگونه کالیبراسیون پارامتر تک نقطهای (که در آن مجموعه پارامترهای مدل بر اساس توافق با یک معیار واحد، مثلاً کل شار مذاب خروجی از یک حفره قفسه یخی، مشخص میشوند) ممکن است مشکلساز باشد. چنین کالیبراسیونهای تک نقطهای اغلب هنگام تنظیم پارامترهای نرخ ذوب اعمال میشوند (مثلاً مراجع ۵۰ ، ۵۶ ، ۵۷ ). در مثال ارائه شده در اینجا، میانگین نرخ ذوب در شروع شبیهسازی (در پایان مرحله مقداردهی اولیه، که به طور جداگانه برای مقادیر مختلف M انجام میشود ) به دلیل بازخورد بین هندسه ذوب و یخ (روشها)، تنها به طور ضعیفی به پارامتر نرخ ذوب M وابسته است (شکل تکمیلی ۳d ). در نتیجه، یک تغییر کوچک در معیار هدف واحد که باید تطبیق داده شود، منجر به تغییر بزرگی در مقدار انتخاب شده M میشود (شکل تکمیلی ۳d )، که در نهایت منجر به تغییر بزرگی در SLR شبیهسازی شده در پایان شبیهسازی میشود (شکل ۲h ). در موارد دیگر که معیار هدف نسبت به پارامترها حساستر است، انتظار میرود تغییر کوچکی در معیار هدف منجر به تغییر کوچکی در پارامتر انتخابشده شود، اما این امر در نهایت ممکن است به دلیل غیرخطی بودن SLR در M منجر به تغییر بزرگی در SLR شبیهسازیشده در پایان شبیهسازی شود .
تأثیر نیروهای انسانی بر توزیع احتمال افزایش سطح دریا
با اعمال روش (روشهای) کالیبراسیون نرخ ذوب بیزی، برای هر بار در هر شبیهسازی، توزیعی از SLR مرتبط با تحقق خاص اعمال نیرو به دست میآید (شکل تکمیلی ۴ ). سپس، با حاشیهبندی تحققهای اعمال نیرو (روشها)، توزیعهای احتمال کالیبره شده SLR را برای هر دو گروه انسانی و خلاف واقع، در هر زمان به دست میآوریم (شکل ۳ الف).

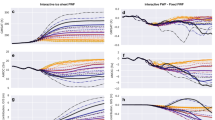
الف) تکامل زمانی (از پایین به بالا) توزیعهای SLR از گروههایی با روند انسانی در اجبار (نارنجی) و با روند خلاف واقع (یعنی بدون روند) در اجبار (سبز). نشانگرهای پر شده، میانه توزیعها را در زمان مربوطه نشان میدهند. ب – د. آمار خلاصه توزیعها در ( الف ) به شرح زیر است: ( ب ) میانه، ( ج ) چولگی و ( د ) کشیدگی. در هر کدام، خطوط چیندار، آمار خلاصه مربوطه را برای توزیعهای بهدستآمده بدون کالیبراسیون پارامتری، که با اختصاص درستنمایی برابر به هر مقدار M بهدستآمده است، نشان میدهند .
تکامل زمانی هر دو مجموعه، رفتار کیفی مشابهی را نشان میدهند. تکامل توزیعها را میتوان به دو بخش زمانی طبقهبندی کرد: «ظهور دم» و «تغییر به سمت دمها» (شکل ۳ ج). در زمانهای اولیه، توزیعها متقارن هستند (شکل ۳ الف)، با چولگی کم (شکل ۳ ج) که نشان میدهد عقبنشینی در هیچ شبیهسازیای آغاز نشده است. با شروع عقبنشینی در شبیهسازیهای منفرد، دوره «ظهور دم» آغاز میشود: یک دم پدیدار میشود (چولگی افزایش مییابد، شکل ۳ ج ) ، که با افزایش سهم SLR از شبیهسازیهای در حال عقبنشینی پشتیبانی میشود، و کشیدگی افزایش مییابد (شکل ۳ د)، که نشان میدهد وزن نسبی در دمها در حال کاهش است (کشیدگی، نسبت وزن قرار داده شده در دمها را کمّی میکند، و کشیدگی کم مربوط به دمهای سنگین است). مقیاس زمانی که دمها پدیدار میشوند به نیروی وارده بستگی دارد (به پایین مراجعه کنید). میانه SLR در دوره ظهور دم کوچک باقی میماند (شکل ۳ ب).
با شروع عقبنشینی در تعداد فزایندهای از اعضای گروه، وزن شروع به جابجایی به سمت دنبالهها میکند؛ دوره «جابجایی به سمت دنبالهها» زمانی آغاز میشود که چولگی و کشیدگی به حداکثر میرسند (شکل ۳c ، d). فراتر از این حداکثر، وزن به سمت دنبالهها حرکت میکند (کشیدگی کاهش مییابد، شکل ۳d ) و در پاسخ به این، میانه افزایش مییابد (شکل ۳a ) و تا انتهای شبیهسازی ادامه مییابد. (با توجه به دادههای کج، میانه معیار مناسبتری نسبت به میانگین است.) هر دو میانه یک تکامل غیرخطی را نشان میدهند که منعکس کننده سهم غیرخطی SLR در شبیهسازیهای فردی پس از شروع عقبنشینی است. اگرچه جزئیات دقیق تکامل توزیعها هم به سیستم و هم به نیرو بستگی دارد (به زیر مراجعه کنید)، ما انتظار داریم که این رفتار کیفی در صفحات یخی دریایی با نقاط اوج تحت نیروی تصادفی با تغییرپذیری بالا، عمومی باشد.
علیرغم این شباهتهای کیفی بین توزیعهای انسانی و غیرواقعی، تفاوتهای کمی واضحی وجود دارد که اهمیت روند انسانی در نیروی رانش را برجسته میکند. اولاً، دنباله در مجموعه انسانی زودتر ظاهر میشود (شکل ۳ ج)، زیرا عقبنشینیها زودتر از زمانی که روندی در نیروی رانش اعمال میشود، آغاز میشوند (شکل تکمیلی ۱) . این در حالی است که نیروی اضافی انسانی در ابتدای شبیهسازی صفر است (شکل ۲ ز)، که نقش افزایش نیرو در طول دوره زمانی که ناهنجاری مذاب یکپارچه بیثباتکننده در حال تجمع است را برجسته میکند: اگر نیرو در این دوره تغییر نمیکرد (یا اگر تغییرات مهم نبودند)، اولین عقبنشینیها تقریباً در همان زمان در هر دو مجموعه رخ میداد. این با مرجع ۱۵ سازگار است ، که نشان میدهد عقبنشینی فعلی WAIS به طور طبیعی در دهه ۱۹۴۰ آغاز شد، اما ممکن است متعاقباً به دلیل افزایش تأثیر نیروی انسانی در اوایل دهه ۱۹۶۰ بهبود نیافته باشد. ثانیاً، حداکثر چولگی در مورد فعالیتهای انسانی کمتر و سریعتر حاصل میشود (شکل ۳ ج). در یک دوره زمانی معین، عقبنشینی در گروه فعالیتهای انسانی در بخش بیشتری از شبیهسازیها نسبت به گروه فعالیتهای غیرواقعی (شکل تکمیلی ۱ ) آغاز میشود و در نتیجه توزیع احتمال سریعتر به سمت رژیم دنبالهدار تغییر میکند. این تفاوت در شروع نرخ عقبنشینی به این دلیل است که با گذشت زمان، ناهنجاریهای ذوب تحت نیروی انسانی به طور فزایندهای بزرگ میشوند، بنابراین مدت زمان ناهنجاری مثبت کوتاهتری برای شروع عقبنشینی مورد نیاز است. به طور خاصتر، با یک روند خطی فعالیتهای انسانی، ناهنجاری ذوب ادغامشده با زمان با مربع زمان مقیاس میشود، که به سرعت بر هر مؤلفه داخلی منفی ادغامشده با زمان غلبه میکند: سیستم در برابر روندهای طولانیمدت ذوب نسبت به تغییرپذیری کوتاهمدت آسیبپذیرتر است. در نهایت، و از همه مهمتر، در مقیاس زمانی صد ساله، هم میانه در گروه فعالیتهای انسانی بزرگتر و هم کشیدگی کوچکتر است تا در گروه فعالیتهای غیرواقعی؛ یعنی نه تنها نیروی انسانی میانه توزیع را افزایش میدهد، بلکه منجر به وزن بیشتر در دنبالهها نیز میشود: رویدادهای حدی، با سهم بالای SLR، احتمالات نسبتاً بزرگی در مجموعه انسانی دارند. این امر بر لزوم در نظر گرفتن شکل و همچنین پراکندگی (مثلاً واریانس) هنگام برقراری ارتباط با سیاستگذاران در مورد چگونگی تأثیر مسیرهای انتشار گازهای گلخانهای بر سناریوهای آینده SLR تأکید میکند.
شکل ۳b-d همچنین نشان میدهد که چگونه آمار خلاصه بین توزیعهای کالیبره شده و کالیبره نشده متفاوت است، که دومی با قرار دادن احتمال پسین برابر با احتمال پیشین (روشها) به دست میآید، یعنی همه مقادیر M به طور مساوی وزن داده میشوند. در هر دو مجموعه، کالیبراسیون پارامتری M تأثیر مهمی بر میانه دارد و نشان دهنده نیاز به اعمال کالیبراسیون پارامتری در پیشبینیهای SLR از صفحات یخی است. کاهش عدم قطعیت در پیشبینیها اغلب (شاید به طور ضمنی) به عنوان یک مزیت کلیدی کالیبراسیون پارامتری ذکر میشود (به عنوان مثال، مراجع ۳۸ ، ۴۰ )؛ در حالی که شبیهسازیهای ما شواهدی برای پشتیبانی از این موضوع ارائه میدهند و افزایش کشیدگی (کاهش وزن در دنبالهها؛ شکل ۳d ) را در مورد کالیبره شده نشان میدهند، عدم قطعیتهای زیادی در توزیعهای کالیبره شده باقی میماند (شکل ۳a ). این نشان میدهد که عدم قطعیت تصادفی بخش اجتنابناپذیر بزرگی از عدم قطعیت در پیشبینیهای SLR از صفحات یخی، به ویژه آنهایی که به شدت مستعد بازخوردهای یخ-اقیانوس هستند، میباشد و نمیتوان از آن غافل شد: کالیبراسیون پارامتری به تنهایی کافی نیست و عدم قطعیت غیرقابل تقلیلی در SLR از صفحات یخی دریایی وجود دارد.
کمّیسازی سیگنالهای روندهای انسانی در اجبار
نقش تغییرات اقلیمی ناشی از فعالیتهای انسانی در رویدادهای آب و هوایی منفرد اغلب به عنوان یک افزایش انسانی ۳۶ در نظر گرفته میشود : این رویداد چند برابر بیشتر (یا کمتر) احتمال دارد که توسط تغییرات اقلیمی ناشی از فعالیتهای انسانی ایجاد شده باشد؟ با ساخت توزیعهای SLR در هر دو مورد انسانی و غیرواقعی، نسبت اینها – نسبت افزایش انسانی (AER) – به طور طبیعی به عنوان معیاری برای تعیین اینکه چند برابر بیشتر احتمال دارد که یک SLR مشاهده شده توسط وجود یک روند انسانی در نیرو ایجاد شده باشد، ظاهر میشود و فراتر از مقایسههای کیفی بخش قبلی است. به عنوان مثال، AER برابر با ۲ نشان میدهد که نیروی انسانی ۱۰۰٪ بیشتر (یا معادل آن، دو برابر بیشتر) در یک SLR معین نقش داشته است. AER برای مجموعههای ما در شکل ۴ الف نشان داده شده است، که در آن مقادیر در امتداد هر خط از زمان ثابت، نسبت بین توزیعهای احتمال انسانی و غیرواقعی را نشان میدهد (همانطور که برای زمانهای خاص در شکل ۳ الف نشان داده شده است). توجه داشته باشید که از آنجا که AER میتواند برای هر زمانی در طول شبیهسازی ساخته شود، SLR گذشته و آینده به طور یکسان قابل اجرا هستند – زمان حال هیچ جایگاه خاصی ندارد. بنابراین، میتوان اظهارات انتساب را برای مشارکتهای SLR گذشته یا آینده (یا هر دو) ارائه داد.

یک نمودار کانتور از نسبت افزایش انسانی (AER) به عنوان تابعی از زمان و مکان، با رنگهایی که توسط نوار رنگی نشان داده شدهاند. ناحیه هاشور خورده نشاندهنده ناحیهای است که در آن AER → ∞ است . b – d تکامل زمانی AER (خطوط ممتد) در امتداد مسیرهای شبیهسازی انتخاب شده SLR، مربوط به خطوط برچسبگذاری شده در ( a ). ناحیه سایهدار نشاندهنده عدم قطعیت در این معیار است که با مقادیر بوتاسترپ توزیعهایی که از تحققهای فردی اعمال نیرو (روشها) حاصل میشوند، به دست آمده است. دادهها فقط برای زمانهایی که SLR > 0.1 میلیمتر است، برای وضوح بیشتر نشان داده شدهاند.
نواری وجود دارد که در آن AER بینهایت است، که ناشی از امتداد دنبالههای توزیع انسانی به مقادیر SLR بالاتر از مقادیر توزیع خلاف واقع است (شکل ۴ الف). مشاهده SLR در این نوار بدون تغییرات اقلیمی ناشی از انسان غیرممکن بود – هیچ شبیهسازی خلاف واقع این مقدار را تولید نمیکند. این نوار با گذشت زمان از ناحیهای نزدیک به مبدا گسترش مییابد (به یاد داشته باشید که دنباله توزیع انسانی اندکی پس از شروع شبیهسازی ظاهر میشود) با سرعتی که توسط عقبنشینی شبیهسازی منفرد با بالاترین SLR تعیین میشود.
AER به طور کلی در SLR در حال افزایش است، که نشان میدهد SLR بالاتر در بسیاری از تحققهای اجبار، شاخص قویتری از تغییرات اقلیمی ناشی از فعالیتهای انسانی است. این امر اهمیت و ارزش در نظر گرفتن عدم قطعیت تصادفی را نشان میدهد: تحت یک تحقق واحد اجبار، SLR بالاتر لزوماً نشان دهنده تأثیر قوی تغییرات اقلیمی ناشی از فعالیتهای انسانی نیست (شکل ۱ )، اما وقتی به طور مناسب در بسیاری از تحققهای اجبار میانگینگیری شود، این امر را نشان میدهد. این امر همچنین تغییر از یک سوال دوتایی بله-خیر به یک رویکرد احتمالی را برجسته میکند که لزوماً هنگام در نظر گرفتن عدم قطعیت تصادفی ۳۵ رخ میدهد . AER دارای ساختار کمی نواری است (شکل ۴ الف)، که ناشی از اندازه محدود گروههای ما است (در محدوده اعضای نامحدود گروه، نسبت عقبنشینیهای آغاز شده هموار خواهد بود، در حالی که به دلیل اندازه محدود گروه ما، نسبت عقبنشینیهای آغاز شده در این کمیت حول روند نوسان میکند، با دورههایی که عقبنشینیهای نسبتاً بیشتر و دورههایی که عقبنشینیهای نسبتاً کمی در مقایسه با روند پسزمینه آغاز میشوند، به شکل تکمیلی ۱ مراجعه کنید ). اگرچه انتظار داریم با بینهایت شدن تعداد تحققهای نیرو، این نواربندی از بین برود، اما توجه داریم که افزایش این تعداد، بهویژه زمانی که عدم قطعیت تصادفی و پارامتری را بهطور همزمان در نظر بگیریم، از نظر محاسباتی پرهزینه است.
در عمل، SLR مشاهدهشده، مانند شبیهسازیهای انتخابشده در شکل ۴ b-d، یک مسیر واحد را در این فضای AER دنبال میکند که در آن عقبنشینی به ترتیب پس از تقریباً ۲۰، ۴۰ و ۶۰ سال آغاز میشود (شکل ۴ a). مقادیر آنها نشاندهنده سیگنال واضح تغییرات اقلیمی ناشی از فعالیتهای انسانی است: در پایان شبیهسازی، AER به ترتیب تقریباً ۲٫۵، ۳٫۹ و ۲٫۲ است که مربوط به افزایش احتمال ۱۵۰٪، ۲۹۰٪ و ۱۲۰٪ است. پس از شروع عقبنشینی، AER نسبتاً ثابت میماند. شایان ذکر است که این مقادیر شاید در مقایسه با مطالعات نسبتدهی یخچالشناسی که برای یخچالهای کوهستانی اعمال میشود، ناچیز باشند (به عنوان مثال، مراجع ۵۸ ، ۵۹ ). این نتیجه مستقیم انتخاب ما از تنظیمات است: ما سناریویی را در نظر میگیریم که در آن تغییرپذیری داخلی در مقایسه با روند فعالیتهای انسانی نسبتاً زیاد است و سیستم به شدت مستعد بازخوردهای اقیانوس یخی است (و این مسیرهای انتخاب شده وارد نوار دم نمیشوند، که برای آن AER → ∞ است ).
از منظر سیاستگذاری، سومین سوال مفید، فراتر از چگونگی پرداختن و چگونگی تعیین کمیت نقش روندهای انسانی در اعمال نیرو، این است: عدم قطعیت در این تعیین کمیت چیست؟ با ساخت توزیعهای مرتبط با هر تحقق اعمال نیرو (که توزیعهای نشان داده شده در شکل ۳a میانگین روی آنها هستند)، میتوان چنین عدم قطعیتهایی را بررسی کرد. برای انجام این کار، مقادیر توزیعها را از تحققهای منفرد اعمال نیرو، برای تعیین یک فاصله اطمینان (روشها) – معیاری از گسترش احتمالی در AER – در اطراف تخمینهای مرکزی خود، بوتاسترپ میکنیم (شکل ۴b -d). عدم قطعیت در AER عموماً در امتداد خطوط مربوط به عقبنشینی بعدی کمتر است (شکل ۴b -d). این با مسیرهای شبیهسازی نسبتاً کمی که وارد منطقه در داخل و اطراف نوار دم میشوند، متناسب است و منجر به افزایش عدم قطعیت میشود: اگرچه تخمین مرکزی افزایش انسانی خود در دمها بزرگترین است، اما در آنجا عدم قطعیت در مقدار بیشترین است. ما انتظار داریم که این محدوده خطا با افزایش تعداد تحققهای اعمال نیرو کاهش یابد. بنابراین، ما انتظار داریم که مطالعات انتساب در دنیای واقعی باید با این محدودیت دست و پنجه نرم کنند که افزایش اندازه گروه برای کاهش عدم قطعیت در نقش نیروی انسانی مورد نیاز است، اما انجام این کار نیازمند منابع محاسباتی اضافی قابل توجهی است.
بحث
مثال ارائه شده در اینجا مسیری را برای ارزیابی نقش تغییرات اقلیمی ناشی از فعالیتهای انسانی در سهم SLR از صفحه یخی غرب قطب جنوب، از جمله کمیسازی قدرت سیگنالهای انسانی و عدم قطعیت آن، فراهم میکند. استفاده ما از یک چارچوب بیزی به ما این امکان را میدهد که عدم قطعیت پارامتری را در ارزیابیهای انتساب در نظر بگیریم و از نیاز به مشخص کردن یک رویداد واحد برای شناسایی اجتناب کنیم. با خلاصه کردن و در نظر گرفتن یک صفحه یخی عمومی، میتوانیم بر روی خطاهای ذوب تمرکز کنیم، با این امید که رویکرد کالیبراسیون ذوب بتواند به پر کردن شکاف قابل توجه در وفاداری به مشاهدات بین پارامتریسازیهای ذوب و شبیهسازیهای جفتشده یخ-اقیانوس کمک کند.
تعیین تأثیر دقیق تغییرات اقلیمی انسانی بر سهم SLR از WAIS مستلزم انجام شبیهسازیها با استفاده از هندسهها و پارامترهایی است که شرایط دنیای واقعی را نشان میدهند. در اینجا سه دسته کلیدی از مشکلات را شناسایی میکنیم که باید در انجام این کار بر آنها غلبه کرد: چالشهای محاسباتی، چالشهای حالت اولیه و چالشهای ناشی از عدم قطعیت در نیروهای اقلیمی. چالشهای محاسباتی از تعداد زیاد شبیهسازیهای مورد نیاز برای در نظر گرفتن مناسب عدم قطعیت پارامتری و تصادفی ناشی میشوند. در بررسی یک صفحه یخی دریایی عمومی، میتوانیم عدم قطعیت ناشی از پارامترهای مدل حاکم بر لغزش پایه و ویسکوزیته یخ، و همچنین فرآیندهایی مانند آسیب (به عنوان مثال، مراجع ۱۹ ، ۶۰ )، زایش (به عنوان مثال، مراجع ۴۶ ، ۶۱ ، ۶۲ )، قانون لغزش (به عنوان مثال، مرجع ۶۳ ) و رئولوژی یخ (به عنوان مثال، مرجع ۶۴ ) را که ممکن است روندهای اقلیمی بلندمدت را در نیروها مبهم (یا تقویت) کنند، نادیده بگیریم، اما باید در ارزیابیهای SLR و در نتیجه انتساب آن به تغییرات اقلیمی انسانی لحاظ شوند. عدم قطعیتهای پارامتری اضافی را میتوان به طور خلاصه در رویکرد بیزی که در اینجا ۳۷ در نظر گرفته شده است ، ادغام کرد و باید با مشاهدات کالیبره شوند. چالش محاسباتی به ویژه با توجه به این نکته اهمیت دارد که برای اطمینان از نمایش صحیح فرآیندهای کلیدی صفحات یخی، باید از وضوح مکانی بالایی استفاده شود (به عنوان مثال، مرجع ۶۵ ). علاوه بر این، تأثیر پارامترهایی که قدرت بهروزرسانیهای بیزی را کنترل میکنند، باید بررسی شود. اگرچه دریافتیم که تغییر این پارامترها در محدودههای معقول، نتایج (روشها) را از نظر کیفی تغییر نمیدهد، اما ممکن است بر مقادیر دقیق افزایش انسانی تأثیر بگذارند. همچنین باید توجه داشت که در حالت ایدهآل، باید از چندین مدل مختلف صفحات یخی برای ارزیابی عدم قطعیتهای ساختاری ناشی از آن دسته از فرآیندهایی که در برخی از مدلهای صفحات یخی ۳۷ نمایش داده نمیشوند ، استفاده شود که این امر به چالش محاسباتی میافزاید.
تعیین حالت اولیه – پیکربندی صفحه یخ قبل از دوران نفوذ انسان – نیز یک چالش اساسی است. پیشبینیهای تکامل صفحه یخ، مشابه پیشبینیهای عددی آب و هوا ۶۶ ، به حالتهای اولیه آنها حساس هستند ، اما اطلاعات نسبتاً کمی در مورد پیکربندی WAIS قبل از ثبت ماهوارهای فراتر از مرزهای وسیع در مکانهای خط اتصال زمین ۱۱ وجود دارد. یک چالش خاص در این زمینه، تعیین موقعیت جبهه یخ است که معمولاً در مدلهای صفحه یخ ثابت میماند، اما ممکن است تأثیر زیادی بر تقویت قفسه یخ و در نتیجه پتانسیل عقبنشینی داشته باشد. علاوه بر این، حافظه صفحه یخ از شرایط هولوسن باید در نظر گرفته شود: در اینجا، ما فرض کردهایم که صفحه یخ در شروع روند نیرو در حالت پایدار است. با این حال، در عمل، شواهدی از عقبنشینی آهسته WAIS در طول هولوسن ۱۴ وجود دارد . با توجه به مقیاسهای زمانی طولانی که صفحات یخ به طور کامل به تغییرات نیرو پاسخ میدهند، دانش این حالت ممکن است توسط صفحه یخ حفظ شود و بنابراین بر احتمال عقبنشینی تأثیر بگذارد.
در نهایت، باید بر چالشهای مرتبط با عدم قطعیتها در نیروهای اقلیمی غلبه کرد. در اینجا، فرض کردیم که روند فعالیتهای انسانی شناخته شده و به خوبی مشخص شده است، اما در عمل، خود این روند باید از مشاهدات و مدلهای اقلیمی استنباط شود که خود یک چالش انتساب است. برای WAIS، این موضوع با عوامل ترکیبی تغییرات پیچیده است: گرمایش اقیانوس باعث عقبنشینی میشود، اما روندهای گرمایش اقیانوس در درجه اول توسط روندهای بادها هدایت میشوند . ۲۴ علاوه بر این، روندهای انسانی در انباشت، که در این مطالعه در نظر گرفته نشدهاند، باید همزمان با روندهای گرمایش اقیانوس در نظر گرفته شوند. در آینده، انتظار میرود روندهای انباشت تا حدودی از دست دادن یخ از WAIS ۷ را جبران کنند و به طور بالقوه سیگنال انسانی را مبهم کنند.
کار ارائه شده در اینجا میتواند به عنوان چارچوبی برای تولید توزیعهای کالیبره شده SLR، علاوه بر کاربرد آنها در گزارههای انتساب، در نظر گرفته شود. ما نشان دادهایم که عدم قطعیت تصادفی و پارامتری، اجزای مهمی از پیشبینیهای SLR صفحات یخی هستند و پیشنهاد میکنیم که ارزیابیهای آینده SLR از صفحات یخی باید این منابع عدم قطعیت را در نظر بگیرند. همانطور که نشان دادهایم، کالیبراسیون پارامتری عدم قطعیت را کاهش میدهد، اما حساسیت به بازخوردهای یخ-اقیانوس، توزیعهای گسترده را اجتنابناپذیر میکند ۶۷ : مانند سایر جنبههای سیستم آب و هوایی ۶۸ ، صفحات یخی عدم قطعیت غیرقابل کاهشی دارند. جامعه یخچالشناسی باید با این جنبههای اساسی عدم قطعیت راحتتر شود و آنها را به طور مناسب به سیاستگذاران و ذینفعان منتقل کند.
با ساخت توزیعهای کالیبرهشده از سهم SLR، نشان دادیم که تغییرات اقلیمی ناشی از فعالیتهای انسانی، هم میانه توزیعها و هم وزن نسبی دنبالههای آنها را افزایش میدهد: مانند بسیاری از رویدادهای آب و هوایی دیگر ۶۹ ، حتی تغییرات اقلیمی ناشی از فعالیتهای انسانی متوسط نیز میتواند سناریوهای شدید را چندین برابر محتملتر کند. با استفاده از این توزیعها، ما معیاری برای تعیین کمیت نقش نیروهای انسانی ساختیم و نتیجه گرفتیم که حتی در صفحات یخی دریایی بسیار ناپایدار، با توجه به گروههای شبیهسازی به اندازه کافی بزرگ که توسط پروفایلهای با و بدون روند انسانی ایجاد شدهاند، و همچنین با در نظر گرفتن کامل عدم قطعیت پارامترهای مدل، تأثیر نیروهای انسانی در اصل قابل تشخیص است. به عبارت دیگر، مطالعات انتساب برای WAIS قابل کنترل هستند. پیامدهای انتساب از دست دادن یخ از WAIS، هم برای آسیبهای ناشی از SLR و هم برای آینده WAIS، انگیزه قوی برای دنبال کردن چنین مطالعاتی را فراهم میکند.
روشها
سهم افزایش سطح دریا در محاسبه عدم قطعیت پارامتری و تصادفی
برای یک روند مشخص در اجبار، که با نشان داده میشود، (یعنی، پس از مشخص کردن اینکه آیا این روند انسانی است یا خلاف واقع)، احتمال یک SLR مشخص، ΔSLR، با در نظر گرفتن عدم قطعیت تصادفی و پارامتری، میتواند به صورت ۳۷ بیان شود .
در اینجا، فضای پارامترهای مدل، n تعداد کل تحققهای اعمال نیرو، R i تحقق خاص اعمال نیرو (با i یک شاخص ساختگی) و I ۰ نشان دهنده شرایط اولیه است. عبارت ( ۱ ) از یک عبارت احتمالی اصول اولیه SLR ۳۷ ، پس از فرض اینکه هر تحقق خاص اعمال نیرو احتمال برابر دارد، و اینکه حالت اولیه I ۰ مشخص است، پیروی میکند. برای کاربرد خاص ما از ( ۱ )، فضای پارامترهای نرخ ذوب است، ۰٫۵ < M < 1.5. توجه داشته باشید که عبارت ( ۱ ) هیچ توضیحی در مورد عدم قطعیت ساختاری مدل، که ناشی از تقریبهایی است که مدلهای صفحات یخی ایجاد میکنند، و همچنین نمایش ناقص یا حذف فرآیندهای فیزیکی آنها ۳۷، ارائه نمیدهد . چنین عدم قطعیتهایی را فقط میتوان با انجام آزمایشهای عددی مشابه با مجموعهای از مدلهای مختلف صفحات یخی، معمولاً در یک تمرین مقایسه بین مدلها (مثلاً مرجع ۷۰ ) به طور دقیق بررسی کرد و بنابراین فراتر از محدوده این کار است. (باید توجه داشت که مدل صفحات یخی WAVI که در اینجا استفاده شده است، تطابق خوبی با سایر مدلهای پیشرفته صفحات یخی در جدیدترین تمرین مقایسه بین مدل صفحات یخی ۷۰ نشان میدهد ). توجه داشته باشید که ساخت توزیعهای SLR با استفاده از روش کالیبراسیون ذکر شده در زیر، مستلزم آن است که مقادیر SLR برای همه مقادیر پارامتر مشخص باشد، اما شبیهسازیها فقط مقدار محدودی از مشاهدات را ارائه میدهند. در اینجا، ما SLR را به عنوان تابعی از M با درونیابی خطی بین Mهای منفرد به دست میآوریم (به شکل تکمیلی ۴ e مراجعه کنید).{{{{{{\mathcal{N}}}}}}
کالیبراسیون نرخ ذوب
کالیبراسیون پارامترهای مدل M از طریق احتمال که در ( ۱ ) ظاهر میشود (در اینجا ما از نام پارامتر خاص M استفاده میکنیم ، نه نام عمومی ). با پیروی از یک رویکرد بیزی استاندارد، یک توزیع پیشین روی پارامترهای M (با هایپرپارامتر μ ) فرض میکنیم که سپس با جذب اطلاعات جدید از طریق درستنمایی، بهروزرسانی میشود. در مورد ما، این اطلاعات جذبشده، نرخ ذوب از یک مدل اقیانوس آفلاین است (به زیر مراجعه کنید). با نشان دادن این اطلاعات با ، قانون بیز بیان میکند کهmathcal{I}}}}}}} _{0}) {{{{{{\mathcal{N}}}}}}
عبارت اول در صورت کسر سمت راست ( ۲ ) نشان دهنده یک تابع درستنمایی است که نحوه بهروزرسانی توزیع پیشین (عبارت دوم در صورت کسر سمت راست) را برای جذب نتایج مدل اقیانوس توصیف میکند. توزیع پیشین، وضعیت باور به پارامترهای مدل N را قبل از مقایسه با مدل اقیانوس توصیف میکند. سمت چپ ( ۲ ) نشان دهنده توزیع پسین است – توزیع پارامترهای M پس از جذب اطلاعات مدل اقیانوس. مخرج سمت راست ( ۲ ) به سادگی برای نرمالسازی توزیع احتمال عمل میکند.
در اینجا، ما یک پیشین گاوسی را فرض میکنیم که آنتروپی نسبی را زمانی که فقط تخمینهای میانگین پیشین μ و انحراف معیار σP در دسترس هستند، حداکثر میکند : ۷۱ ، ۷۲
در اینجا α یک ثابت نرمالسازی است که تضمین میکند توزیع ( ۳ ) هنگام اعمال مرزهای اولیه روی M به وحدت برسد (به «مقداردهی اولیه مدل صفحه یخی» در زیر مراجعه کنید). σP را میتوان به عنوان توصیفکننده قدرت اطمینان در تخمین اولیه M در نظر گرفت ، که حول محور ابرپارامتر μ متمرکز است: یک σP پایین (به ترتیب بالا) مربوط به اطمینان بالا (پایین) است که ابرپارامتر μ نشان دهنده مقدار واقعی M است . در نتایج موجود در اینجا، ما از μ = ۱٫۲۵ استفاده میکنیم، بر اساس توافق در میانگین نرخ ذوب پس از مرحله اولیه (در این مورد، میانگین نرخ ذوب ۲۳ متر در سال -۱ ، که میتوان آن را به عنوان یک قطعه دلخواه از اطلاعات قبلی در نظر گرفت). ما از σP = 0.2 استفاده میکنیم (شکل تکمیلی ۴ )، که نشان دهنده اطمینان تا حدودی ضعیفی است که مقدار M = μ نشان دهنده مقدار واقعی M است . شکل تکمیلی ۶b نموداری از پیشین گاوسی ( ۳ ) را به عنوان تابعی از M برای مقادیر مختلف σP با μ = ۱٫۲۵ نشان میدهد .
برای تعیین درستنمایی ، ابتدا برشهای زمانی کالیبراسیون را مشخص میکنیم و برای هر برش زمانی، مدل اقیانوس را در هندسه تعیین شده توسط مدل فقط یخ اجرا میکنیم. پس از انجام این کار، دو میدان نرخ ذوب داریم،
به ترتیب از پارامترسازی ذوب و از مدل اقیانوس، و برای هر برش زمانی k = ۱, …, n . (توجه داشته باشید که مدل اقیانوس از طریق هندسه حفره قفسه یخی به پارامتر نرخ ذوب M بستگی دارد . ) یک تابع خطای ذوب Dj با مقایسه این دو میدان تعیین میشود. انتخاب خاص شکل Dj ذهنی است و نشان میدهد که چگونه ذوب باید جریمه شود. در اینجا، Dj را میانگین خطای مطلق در دو میدان ذوب روی سلولهای شبکهای زیر عمق ۵۰۰ متر در نظر میگیریم . این نشان دهنده این واقعیت است که مناطق عمیق، معمولاً نزدیک به خطوط اتصال به زمین، تأثیرات نامتناسب زیادی بر دینامیک یخ متصل به زمین دارند ۷۳ ، ۷۴ ، ۷۵ .
از خطاهای برش زمانی Dj ، میانگین خطا را تعیین میکنیم . سپس درستنمایی از یک مدل خطای نمایی تعیین میشود،
در اینجا σL کوواریانس خطای ذوب است که توصیف میکند خطاهای نرخ ذوب حاصل از پارامترسازی چقدر شدید جریمه میشوند (نسبت به مدل اقیانوس): برای σL کم ، خطاها شدیدتر جریمه میشوند، در حالی که برای σL بالا ، خطاها کمتر شدید جریمه میشوند. در حد σL → ∞ ، به هر مقدار پارامتر M وزن مساوی اختصاص داده میشود و توزیع پسین با توزیع پیشین یکسان است (شکل تکمیلی ۴ و). شکل تکمیلی ۶ ب نموداری از مدل خطای نمایی ( ۶ ) را به عنوان تابعی از D برای مقادیر مختلف σL نشان میدهد . در نتایج ارائه شده در اینجا، ما از σL = 10 متر در سال استفاده میکنیم . به طور کلی، σL باید در همان مرتبه بزرگی خطاهای ذوب باشد. در شبیهسازیهای ما ، خطاهای ذوب معمولاً در مرتبه ۱۰ متر در سال هستند (شکل تکمیلی ۴ الف).
برای ادغام خطاهای برش زمانی در بهروزرسانی بیزی، به عنوان تابعی از M نیاز داریم ، اما شبیهسازی فقط نقاط پراکنده را ارائه میدهد (شکل تکمیلی ۴ ب). برای غلبه بر این، ما بین نقاط داده با استفاده از یک برازش اسپلاین هموارکننده، از طریق تابع FIT در MATLAB، درونیابی میکنیم.
شکل تکمیلی ۶c، AER را به عنوان تابعی از SLR و زمان (یعنی، مانند شکل ۴ متن اصلی) برای مقادیر مختلف پارامتر قبلی σP و کوواریانس خطای ذوب σL در محدودههای معقول نشان میدهد . میبینیم که اگرچه تغییر این پارامترها مقدار دقیق AER را تنظیم میکند، تصویر کلی – که SLR مشاهده شده بالاتر با تأثیر انسانی قویتر همراه است – همچنان پابرجاست. استثنای کوچک در این مورد برای σP بزرگ و σL کوچک است که برای آنها سیگنال انسانی بیشترین ابهام را دارد (به پایین مراجعه کنید) و یک باند AER < 1 نزدیک به دم ظاهر میشود . این یک اثر با اندازه محدود است و در محدوده تعداد زیادی از شبیهسازیها ناپدید میشود و بر نیاز به گروههای بزرگ شبیهسازی تأکید میکند.
برای σL کوچکتر ، خطاهای ذوب شدیدتر جریمه میشوند؛ در این مطالعه، σL کوچکتر تمایل دارد وزن را به سمت M کوچکتر منتقل کند ، که معمولاً خطاهای کوچکتری را در ذوب نشان میدهد ( برای مثالی از یک تحقق نیرو به شکل تکمیلی ۴ الف و ب مراجعه کنید). شبیهسازیهایی که از مقدار کوچکتر M استفاده میکنند ، برای دستیابی به همان ناهنجاری ذوب یکپارچه مورد نیاز برای شروع عقبنشینی، به یک ناهنجاری نیرویی انتگرال زمانی بزرگتر نیاز دارند. بنابراین، شبیهسازیهایی که در آنها این امر در حالت انسانی و نه در حالت خلاف واقع حاصل میشود، به طور متوسط بعداً مشاهده میشوند، زمانی که تفاوت میانگین گروه در نیرو بیشتر است. بنابراین، برای یک زمان معین، نسبت اعضای گروه که در گروه انسانی عقبنشینی کردهاند به آنهایی که در گروه خلاف واقع عقبنشینی کردهاند، برای M کوچکتر به واحد نزدیکتر است که منجر به کاهش اثر انسانی میشود. برعکس، σP کوچکتر ، وزن را به سمت M = μ = ۱٫۲۵ (در این مورد) منتقل میکند، که در انتهای بالاتر محدوده M در نظر گرفته شده در اینجا قرار دارد و اثر انسانی را افزایش میدهد.
جزئیات پیکربندی صفحات یخی
چیدمان پیکربندی عمومی صفحات یخی دریایی بسیار شبیه به مرجع ۴۹ است که با استفاده از یک مدل جفتشدهی یخ-اقیانوس تحت سناریوهای نیروی ثابت، بررسی کرد که چگونه بازخوردهای یخ-اقیانوس، عقبنشینی یک صفحه یخی از پشته بستر دریا را تداوم میبخشد. در این چیدمان، عمقسنجی (شکل ۲ الف) را میتوان به صورت مجموع اجزای جریان در امتداد و جریان متقاطع بیان کرد:
کجا
در اینجا، x و y به ترتیب مختصات در جهت جریان در امتداد و عرضی هستند (برج در امتداد جهت جریان عرضی قرار دارد، به شکل ۲ الف مراجعه کنید). سهم عمقسنجی جریان عرضی، By y ( y )، مربوط به یک پیکربندی متقارن دره مانند است که حاشیههای آن ۵۰۰ متر زیر سطح دریا و مرکز آن ۱۱۰۰ متر زیر سطح دریا قرار دارد. سهم عمقسنجی جریان در امتداد، Bx ( x )، مربوط به یک برآمد گاوسی با ارتفاع ۴۰۰ متر و مقیاس طولی σb = ۱٫۱ × ۱۰۴ متر است که در موقعیتی با مرکز x = ۲۶۵ کیلومتر بر روی دره قرار گرفته است.
طبق بند ۴۹ ، رئولوژی یخ توسط قانون گلن با توان جریان n = ۳ توصیف میشود . یک ضریب نرخ ثابت A = ۲٫۹۴ × ۱۰⁻ … تجمع سطحی به صورت خطی از ۱۵ میلیآمپر ساعت در مرز یخ ( x = ۰ کیلومتر) تا ۱ میلیآمپر ساعت در x = ۱۵۰ کیلومتر متغیر است و بین x = ۱۵۰ کیلومتر و جبهه یخ ( x = ۳۰۰) کیلومتر روی مقدار ثابت ۱ میلیآمپر ساعت تنظیم میشود . مجموع تجمع سطحی حاصل، ۶۷.۵ گیگاتن بر ساعت ، با مشاهدات ۷۷ مطابقت نزدیکی دارد ، در حالی که الگوی مکانی، تجمع کاهش یافته با کاهش ارتفاع را نشان میدهد.
مدل ورقه یخی WAVI
سهم SLR از شبیهسازیها با استفاده از مدل صفحه یخی یکپارچه عمودی مبتنی بر موجک (WAVI) ۷۲ ، ۷۸ ، یک مدل صفحه یخی با حجم محدود شامل اعمال تنشهای برشی عمودی غشایی و سادهشده ۷۹ ، تعیین میشود . WAVI از یک شبکه حل منظم (در اینجا ۱ کیلومتر در هر دو جهت) استفاده میکند که در طول فرآیند حل به صورت پویا اصلاح میشود تا سرعت و دقت حل را تسهیل کند. WAVI موقعیت جبهه یخی ثابتی را فرض میکند که روی x = ۳۰۰ کیلومتر تنظیم شده است (این معادل تجویز قانون زایش است که شار زایش برابر با سرعت عادی یخ در جبهه یخ است).
پارامترسازی نرخ ذوب
ذوب شدن در مدل صفحه یخی طبق قانون دمای درجه دوم ۸۰ پارامتری میشود ،
در اینجا، M یک پارامتر نرخ ذوب بدون بعد (متغیر) است، T a دمای محیط دور از پایه قفسه یخی است (به پایین مراجعه کنید)، T f دمای انجماد محلی است و Γ = ۰٫۵۶ متر در سال -۱ °C -۲ نقش ضریب تبادل بین دما و نرخ ذوب را ایفا میکند. (با استفاده از نامگذاری ۵۰ ، ۸۱ ، ، که در آن γ T سرعت تبادل، ρ w چگالی آب، ρ i چگالی یخ، c p ظرفیت گرمایی ویژه آب، L گرمای نهان ذوب است.) فرمول ( ۱۰ ) اساساً دو مکانیسم را که به شدت بر ذوب پایه یخ تأثیر میگذارند، کدگذاری میکند: (۱) ذوب یخ قفسهای توسط شار حرارتی آشفته از اقیانوس به یخ کنترل میشود، که مانند حاصلضرب دمای اقیانوس و سرعت تغییر میکند؛ (۲) سرعت اقیانوس با نیروی حرارتی محلی با آزاد شدن آب ذوب شده افزایش مییابد و نیروی شناوری و در نتیجه قدرت گردش را افزایش میدهد. این پارامترسازی در مطالعات مدلسازی متعدد پهنههای یخی مورد استفاده قرار گرفته است (به مرجع ۴۴ و منابع موجود در آن، از جمله آخرین ارزیابیهای ISMIP ۸۱ مراجعه کنید) .({T}_{a}-{T}_{f})
طبق استاندارد، فرض میکنیم که نقطه انجماد محلی به صورت خطی به فشار و شوری بستگی دارد، T f = λ ۱ S a + λ ۲ + λ ۳ z b ، که در آن λ ۱ = -۵٫۷۳ × ۱۰ −۲ °C شیب شوری لیکوئیدوس، λ ۲ = ۸٫۳۲ × ۱۰ −۲ °C نقطه تقاطع لیکوئیدوس، λ ۳ = ۷٫۶۱ × ۱۰ −۴ °C m −۱ شیب عمق لیکوئیدوس، S a شوری محیط (به پایین مراجعه کنید) و z b عمق پایه قفسه یخی است.
ما یک ساختار لایهای برای دما و شوری محیط (شکل ۲c ، d) در نظر میگیریم که صرفاً از طریق عمق مرکز پیکنوکلاین، Pc ( که عموماً وابسته به زمان است) و نیمپهنای پیکنوکلاین w پارامتری میشود :
پروفیلهای ( ۱۱ ) و ( ۱۲ ) توابع خطی تکهای از عمق هستند (شکل ۲c، d ): آنها هم در لایه بالایی (دما -۱ درجه سانتیگراد، شوری ۳۴ PSU، مربوط به آب زمستانی) و هم در لایه پایینی (دما ۱٫۲ درجه سانتیگراد، شوری ۳۴٫۶ PSU، مربوط به آب عمیق دایرهای) ثابت هستند که توسط یک پیکنوکلاین با ضخامت ۲ w m از هم جدا میشوند، که در سراسر آن دما و شوری به صورت خطی تغییر میکنند. این پروفیلهای خطی تکهای تقریبی از شرایط معمول در دریای آموندسن هستند ۲۶ ، ۵۲٫ در اینجا، ما w = 200 متر را در نظر میگیریم که مربوط به عرض پیکنوکلاین ۴۰۰ متر است، که با مشاهدات ۵۱ ، ۵۲ سازگار است . نیروی تصادفی متغیر با زمان با تغییر مرکز پیکنوکلاین اعمال میشود (به «نیروی تصادفی» در زیر مراجعه کنید).
مدل اقیانوس MITgcm
نرخهای ذوب مدل اقیانوس که به عنوان دادههای کالیبراسیون استفاده میشوند، با حل گردش حفره قفسه یخی با استفاده از مدل گردش عمومی موسسه فناوری ماساچوست (MITgcm) ۸۲ محاسبه میشوند . روشی که برای تعیین نرخهای ذوب مدل اقیانوسی در مقاطع زمانی τ ۱ ، …، τ n تحت یک نیروی Pc ( t ) داده شده اعمال میشود به شرح زیر است: (۱) مدل صفحه یخی (با ذوب پارامتری) را تحت این پروفیل نیرو اجرا کنید؛ (۲) از خروجی این برای تعیین هندسههای قفسه یخی در مقاطع زمانی t = τ ۱ ، …، τ n استفاده کنید ؛ (۳) برای هر یک از این هندسهها، مدل اقیانوس را در این هندسه اجرا کنید، با اعمال نیرو از طریق یک شرط مرزی بازیابی مربوط به پروفیلهای Pc ( τ k ). شرط مرزی بازیابی در انتهای پاییندست دامنه در x = ۳۶۰ کیلومتر (شکل ۲ الف) اعمال میشود ، جایی که دما و شوری به پروفیلهای عمودی T a و S a در فاصله پنج سلول شبکه افقی با مقیاس زمانی بازیابی ۱۲ ساعت بازگردانده میشوند . مثالی از میدانهای نرخ ذوب و تولید شده توسط این روش در شکل تکمیلی ۲ نشان داده شده است .
شبکه مدل اقیانوسی دارای ۵۵ لایه با فاصله عمودی dz = ۲۰ متر و وضوح افقی dx = ۱ کیلومتر است. ما از MITgcm در حالت هیدرواستاتیک با یک طرح سطح آزاد غیرخطی ضمنی، یک طرح جابجایی محدود شار فضا-زمان مستقیم مرتبه سوم و یک معادله حالت غیرخطی ۸۳ استفاده میکنیم . طرح Pacanowski-Philander ۸۴ اختلاط عمودی را پارامتری میکند. مقادیر ثابت ۱۵ و ۲.۵ متر مربع بر ثانیه به ترتیب برای ویسکوزیته لاپلاسین افقی و ضریب نفوذ افقی استفاده میشوند. معادلات روی یک صفحه f با f = -۱.۴ × ۱۰ -۴ ثانیه حل میشوند . برای هر هندسه، MITgcm به مدت سه ماه با استفاده از گام زمانی ۳۰ ثانیه اجرا میشود و پس از آن پیکربندی در حالت شبه پایدار قرار میگیرد. نرخ ذوب مدل اقیانوسی به عنوان نرخ ذوب پس از سه ماه شبیهسازی در نظر گرفته میشود. ضریب درگ در فرمولبندی سه معادلهای ذوب ۸۵ مورد استفاده در MITgcm برابر با ۹ × ۱۰−۳ در نظر گرفته شده است ؛ این مقدار تضمین میکند که نرخ ذوب مدل اقیانوسی در هندسههای پس از مقداردهی اولیه (به «مقداردهی اولیه مدل ورقه یخی» مراجعه کنید) با مقادیر کل شار آب ذوبشده مشاهدهشده (مثلاً مرجع ۵۲ ) از یخچال طبیعی جزیره پاین مطابقت نزدیکی دارد.
مقداردهی اولیه مدل پهنه یخی
پس از ۴۹ ، ما یک روش مقداردهی اولیه دو مرحلهای را اعمال میکنیم که در شکل تکمیلی ۳ الف شرح داده شده است. در مرحله اول مقداردهی اولیه، هندسه یخ از پیکربندی اولیه که در آن سطح یخ ۱۵۰ متر بالاتر از سطح دریا به مدت ۵۰ سال است، گام زمانی میگیرد (توجه داشته باشید که WAVI از شرط شناورسازی هیدرواستاتیک استفاده میکند، بنابراین مشخص کردن سطح یخ و ارتفاع بستر، ضخامت یخ را در همه جا تعیین میکند). پس از این، یخ تقریباً در حالت پایدار قرار دارد و هندسه قفسه یخی در شکل تکمیلی ۳ ج نشان داده شده است.
در مرحله دوم از فرآیند مقداردهی اولیه، ذوب آغاز میشود (شکل تکمیلی ۳ ). سپس هندسه یخ از انتهای مرحله مقداردهی اولیه اول به مدت پنجاه سال با استفاده از نیروی ثابت اقیانوسی با P c = -۵۰۰ متر، گام زمانی برداشته میشود. این عمق پیکنوکلاین مطابق با شرایط معمول فراساحلی WAIS است (یعنی نه گرم و نه سرد) ۵۱ ، ۵۲٫ در ادامه، نیروی گرم را به عنوان نیروی ثابت با P c = -۴۰۰ متر در نظر میگیریم که تقریباً معادل کمعمقترین پیکنوکلاین ثبت شده ۵۱ است. به طور مشابه، نیروی سرد را به عنوان نیروی ثابت با P c = -۶۰۰ متر در نظر میگیریم که تقریباً معادل عمیقترین پیکنوکلاین ثبت شده ۵۱ است. مرحله مقداردهی اولیه دوم برای هر مقدار M به طور مستقل انجام میشود . حالت ( وابسته به M ) در انتهای مرحله دوم مقداردهی اولیه (شکل تکمیلی ۳c ) سپس به عنوان شرط اولیه در شبیهسازیهای عقبنشینی بعدی (شکل تکمیلی ۳ ) استفاده میشود.
توجه داشته باشید که برای تخمین ثابت سهم SLR از شبیهسازیها با مقادیر مختلف M ، به شرایط اولیه مشابهی نیاز داریم که به عنوان یک خط اتصال به زمین در یا نزدیک به تاج پشته بستر دریا انتخاب میشود. برای M ≳ ۱٫۵، یخ در طول مرحله دوم مقداردهی اولیه به طور برگشتناپذیری به پایین پشته عقبنشینی میکند. بنابراین، ما فقط مقادیر M کوچکتر از این را در نظر میگیریم. علاوه بر این، ما فرض میکنیم که یک نیروی گرم ثابت اعمال شده به فلات قاره باید عقبنشینی را آغاز کند (در عمل، فرض بر این بود که عقبنشینی WAIS با نیروی نوسانی بین گرم و سرد آغاز میشود ۱۱ )؛ ما دریافتیم که برای M ≲ ۰٫۵، هیچ عقبنشینی ورقه یخی تحت نیروی گرم آغاز نشد. بنابراین، ما خود را به محدوده ۰٫۵ ≤ M ≤ ۱٫۵ محدود میکنیم. توجه داشته باشید که این محدودیت با چارچوب بیزی ما سازگار است: معادل تنظیم چگالی قبلی به صفر در خارج از محدوده ۰٫۵ ≤ M ≤ ۱٫۵، بر اساس محدودیتهای مشاهدهای است.
در طول مرحله دوم مقداردهی اولیه، لایه یخی در پاسخ به ذوب اعمال شده نازک میشود، اما خط اتصال به زمین عقبنشینی نمیکند (شکل تکمیلی ۳ ج). میانگین نرخ ذوب پس از مرحله دوم مقداردهی اولیه تنها وابستگی ضعیفی به M دارد (شکل تکمیلی ۳ ب). اگر هندسهها در پایان مقداردهی اولیه دوم برای مقادیر مختلف M یکسان بودند ، میانگین نرخ ذوب در شبیهسازی با M = ۱٫۵، ۳ برابر بزرگتر از M = ۰٫۵ (خط چین سیاه در شکل تکمیلی ۳ ب) خواهد بود. با این حال، به دلیل اثرات دما-عمق، این مقدار فقط تقریباً ۱٫۱ برابر است (تقریباً ۲۳٫۵ متر در سال -۱ در مورد M = ۱٫۵ در مقابل تقریباً ۲۱٫۳ متر در سال -۱ در مورد M = 0.5، به شکل تکمیلی ۳ ب مراجعه کنید ). همچنان که لایه یخی در پاسخ به ذوب شدن نازک میشود، کمعمقتر میشود و آن را در معرض شرایط سردتر اقیانوس قرار میدهد، نرخ ذوب را به شدت کاهش میدهد و نازک شدن بیشتر را محدود میکند (نرخ ذوب متناسب با است ، که با عمق به شدت تغییر میکند، به ویژه در محدوده عمق اشغال شده توسط لایه یخی در مرحله دوم کالیبراسیون، به شکل تکمیلی ۳d مراجعه کنید ) .
اجبار تصادفی
پس از دو مرحلهی اولیهسازی که در بالا ذکر شد، نیروی تصادفی از طریق شرایط محیطی اقیانوس اعمال میشود:
که در آن Pc ، ۰ = -۵۰۰ متر عمق پیکنوکلاین در مرحله دوم فرآیند مقداردهی اولیه است، یک روند وابسته به سناریوی نیرو (یعنی، انسانی یا خلاف واقع) است (به زیر مراجعه کنید)، A دامنه نیروی تصادفی است، و یک فرآیند خودهمبستگی مرتبه اول است که شامل بخش تصادفی نیرو است. در نتایج نشان داده شده در اینجا، ما از A = ۱۰۰ متر استفاده میکنیم که با تغییرپذیری داخلی مشاهده شده در دریای آموندسن ۵۲ مطابقت دارد . در یک سری زمانی خودهمبستگی مرتبه اول، مقدار زیر به یک جزء متناسب با ورودی فعلی تجزیه میشود، که ثابت تناسب آن مقیاس زمانی تداوم تغییرپذیری را توصیف میکند، و یک عبارت نویز سفید افزایشی. ما همان تابع خودهمبستگی مرجع را در نظر میگیریم. ۳۵ ، با مقیاسهای زمانی بین دههای تا دههای دیگر که به خوبی نمایش داده شدهاند.{{{{{{\mathcal{R}}}}}}}(t)
گروههای انسانی و خلاف واقع از طریق روند متمایز میشوند : تحققهای نیروی وارده از گروه خلاف واقع هیچ روندی به آنها اضافه نشده است، T = ۰ متر؛ تحققهای نیروی وارده در گروه انسانی روند خطی دارند، T = A ۰ ( t / ۱۰۰yrs)، که در آن A ۰ = ۱۰۰ متر روند کمعمق شدن پیکنوکلاین در هر قرن است (شکل ۲ g).
توزیعهای خودراهاندازی افزایش سطح دریا
هر یک از n تحقق نیرو، یک توزیع پارامتری کالیبره شده از SLR را برای هر زمان در شبیهسازی به دست میدهد. بنابراین، برای هر زمان و هر SLR، n مقدار از توزیعها از هر دو مجموعه انسانی و خلاف واقع داریم (شکل تکمیلی ۵ ). یک تخمین عدم قطعیت در نسبت افزایش انسانی با بوتاسترپ کردن این مقادیر ساخته میشود – نمونهبرداری مجدد از این n مقدار با جایگزینی (در اینجا، ما ۱۰۰۰ بار نمونهبرداری میکنیم)؛ مجموعه حاصل، انحراف معیار λ = λ ( SLR R , t ) را برای هر دو مجموعه انسانی و خلاف واقع به دست میدهد (شکل تکمیلی ۵ ). با استفاده از اندیسها برای نشان دادن مجموعه (یعنی خلاف واقع یا انسانساخت)، حد بالایی نشان داده شده در شکل ۴ b-d به صورت زیر محاسبه میشود:
که در آن ℓ = ℓ ( S L R , t ) چگالی احتمال است. به طور مشابه، کران پایین به صورت زیر محاسبه میشود:
در دسترس بودن دادهها
دادههای مورد استفاده برای تولید ارقام موجود در اینجا در یک مخزن باز GitHub به آدرس https://github.com/alextbradley/WAISAttribution-figures موجود است که در مخزن دائمی Zenodo به آدرس https://doi.org/10.5281/zenodo.10514080 نگهداری میشود. دادههای پردازش شده از صفحات یخی و مدل اقیانوسی در یک مخزن دائمی Zenodo به آدرس https://doi.org/10.5281/zenodo.7900762 موجود است .
در دسترس بودن کد
کد مورد نیاز برای تجزیه و تحلیل دادهها در یک مخزن گیتهاب باز به آدرس https://github.com/alextbradley/WAISAttribution-figures موجود است که در مخزن دائمی Zenodo به آدرس https://doi.org/10.5281/zenodo.10514080 نگهداری میشود .
تغییر تاریخچه
۱۴ اوت ۲۰۲۴
اصلاحیه این مقاله منتشر شده است: https://doi.org/10.1038/s43247-024-01600-7
منابع
-
موگینوت، جی.، ریگنوت، ای. و شیوچل، بی. افزایش پایدار تخلیه یخ از فروافتادگی دریای آموندسن، غرب قطب جنوب، از سال ۱۹۷۳ تا ۲۰۱۳. Geophys. Res. Lett. ۴۱ ، ۱۵۷۶–۱۵۸۴ (۲۰۱۴).
-
اسمیت، ب. و همکاران. کاهش فراگیر جرم صفحات یخی، منعکس کننده فرآیندهای رقابتی اقیانوسی و جوی است. Science ۳۶۸ ، ۱۲۳۹–۱۲۴۲ (۲۰۲۰).
-
ریگنوت، ای.، موژینو، جی.، مورلیگم، ام.، سروسی، اچ. و شیوچل، بی. عقبنشینی گسترده و سریع خط اتصال زمین در یخچالهای پاین آیلند، توایتز، اسمیت و کوهلر، غرب قطب جنوب، از سال ۱۹۹۲ تا ۲۰۱۱. Geophys. Res. Lett. ۴۱ ، ۳۵۰۲–۳۵۰۹ (۲۰۱۴).
-
تیم IMBIE. موازنه جرم صفحه یخی قطب جنوب از سال ۱۹۹۲ تا ۲۰۱۷. Nature ۵۵۸ ، ۲۱۹–۲۲۲ (۲۰۱۸).
-
اوتوساکا، ایندیانا و همکاران. موازنه جرم صفحات یخی گرینلند و قطب جنوب از سال ۱۹۹۲ تا ۲۰۲۰. دادههای علمی سیستم زمین ۱۵ ، ۱۵۹۷–۱۶۱۶ (۲۰۲۳).
-
ووترز، ب. و ون د وال، ر. و همکاران. بودجه جهانی سطح دریا از سال ۱۹۹۳ تاکنون. دادههای علوم سیستم زمین ۱۰ ، ۱۵۵۱–۱۵۹۰ (۲۰۱۸).
-
ادواردز، تی. ال. و همکاران. سهم پیشبینیشده یخهای خشکی در افزایش سطح دریا در قرن بیست و یکم. نیچر ۵۹۳ ، ۷۴–۸۲ (۲۰۲۱).
-
لیزروویتز، آ. انتقال خطرات گرمایش جهانی: ادراکات آمریکایی از خطر، تصاویر عاطفی و جوامع تفسیری. در کتاب «ایجاد فضایی برای تغییر: انتقال تغییرات اقلیمی و تسهیل تغییر اجتماعی» (ویراستاران: موزر، اس سی و دیلینگ، ال.) ۴۴–۶۳ (انتشارات دانشگاه کمبریج، ۲۰۰۷).
-
لمن، ب.، تامپسون، ج.، دیویس، س. و کارلسون، ج. م. تصاویر عاطفی از تغییرات اقلیمی. فرانت. سایکول. ۱۰ ، ۹۶۰ (۲۰۱۹).
-
مردیت، ام. ام و همکاران. مناطق قطبی. در گزارش ویژه IPCC در مورد اقیانوس و کرایوسفر در یک اقلیم در حال تغییر (ویراستاران پورتنر، اچ.-او. و همکاران) (۲۰۱۹).
-
اسمیت، جی.ای و همکاران. رسوبات زیر صفحه یخی، تاریخچه عقبنشینی یخچال طبیعی جزیره پاین در قرن بیستم را ثبت میکنند. نیچر ۵۴۱ ، ۷۷–۸۰ (۲۰۱۷).
-
استیگ، ایجی، دینگ، کیو، باتیستی، دی و جنکینز، ای. نیروی حارهای ناشی از نازک شدن یخچالهای طبیعی ناشی از جریان ورودی و خروجی آبهای عمیق پیرامون قطبی در فروافتادگی دریای آموندسن، غرب قطب جنوب. مجله آن. گلاسیول. ۵۳ ، ۱۹-۲۸ (۲۰۱۲).
-
اوکانر، جی کی، هالند، پی آر، استیگ، ای جی، دوتریو، پی. و حکیم، جی جی. ویژگیها و نادر بودن رویداد باد غربی قوی دهه ۱۹۴۰ بر فراز دریای آموندسن، غرب قطب جنوب. کرایوسفر. ۱۷ ، ۴۳۹۹–۴۴۲۰ (۲۰۲۳).
-
لارتر، آر. دی. و همکاران. بازسازی تغییرات در دریای آموندسن و بخش دریای بلینگسهاوزن از صفحه یخی غرب قطب جنوب از زمان آخرین حداکثر یخچالی. Quat. Sci. Rev. ۱۰۰ ، ۵۵–۸۶ (۲۰۱۴).
-
هالند، پیآر و همکاران. عوامل انسانی و داخلی تغییرات باد بر فراز دریای آموندسن، قطب جنوب غربی، در طول قرنهای بیستم و بیست و یکم. کرایوسفر ۱۶ ، ۵۰۸۵–۵۱۰۵ (۲۰۲۲).
-
دی ریدت، جی.، هالند، پی. آر، دوتریو، پی. و جنکینز، ای. کنترلهای هندسی و اقیانوسشناسی بر ذوب شدن یخهای زیر یخچال طبیعی جزیره پاین. مجله ژئوفیزیک. پژوهشهای اقیانوسها ، ۱۱۹ ، ۲۴۲۰–۲۴۳۸ (۲۰۱۴).
-
فاویر، ال. و همکاران. عقبنشینی یخچال طبیعی جزیره پاین که تحت کنترل بیثباتی صفحات یخی دریایی است. Nat. Clim. Change ۴ ، ۱۱۷–۱۲۱ (۲۰۱۴).
-
بت، دی تی و همکاران. تأثیر تعادل آب شیرین دریای آموندسن بر ذوب اقیانوسی صفحه یخی غرب قطب جنوب. مجله ژئوفیزیک. پژوهشها. اقیانوسها ۱۲۵ ، e2020JC016305 (۲۰۲۰).
-
لرمیت، اس. و همکاران. آسیب، بیثباتی قفسه یخی و از دست دادن جرم در فروافتادگی دریای آموندسن را تسریع میکند. مجموعه مقالات ملی آکادمی علوم. ۱۱۷ ، ۲۴۷۳۵–۲۴۷۴۱ (۲۰۲۰).
-
بردلی، آ.، بت، د.، دوتریو، پ.، دی ریدت، ج. و هالند، پ. تأثیر جدایش یختاق جزیره پاین بر ذوب پایه. مجله ژئوفیزیک. پژوهشهای اقیانوسها ۱۲۷ ، e2022JC018621 (2022).
-
هالند، پیآر، بوان، اسال و لاکمن، ایجی. بازخورد شدید ذوب اقیانوس در طول عقبنشینی اخیر یخچال طبیعی توایتز. ژئوفیزیک. پژوهشها. لت. ۵۰ ، e2023GL103088 (2023).
-
ویرتمن، جی. پایداری محل اتصال یک صفحه یخی و یک قفسه یخی. مجله یخچال. ۱۳ ، ۳–۱۱ (۱۹۷۴).
-
شوف، سی. دینامیک خط اتصال به زمین ورقه یخی: حالتهای پایدار، پایداری و هیسترزیس. مجله ژئوفیزیک. پژوهشهای سطح زمین ۱۱۲ ، F03S28 (2007).
-
هالند، پی آر، بریس گیردل، تی جی، دوتریو، پی.، جنکینز، ای. و استیگ، ای جی. ذوب یخهای غرب قطب جنوب تحت تأثیر تغییرات اقلیمی داخلی و نیروی انسانی. Nat. Geosci. ۱۲ ، ۷۱۸–۷۲۴ (۲۰۱۹).
-
کریستینسون، ک. و همکاران. حساسیت یخچال طبیعی جزیره پاین به نیروی اقیانوسی مشاهدهشده. Geophys. Res. Lett. ۴۳ ، ۱۰-۸۱۷ (۲۰۱۶).
-
جنکینز، آ. و همکاران. عقبنشینی صفحه یخی قطب جنوب غربی در دریای آموندسن ناشی از تغییرات اقیانوسی دههای. Nat. Geosci. ۱۱ ، ۷۳۳–۷۳۸ (۲۰۱۸).
-
کریستی، اف دی، استیگ، ای جی، گورملن، ان، تت، اس اف و بینگهام، آر جی. تغییرات اقلیمی بین دههای باعث واکنش متفاوت یخها در امتداد قطب جنوب غربی رو به اقیانوس آرام میشود. نات. کامن. ۱۴ ، ۹۳ (۲۰۲۳).
-
ناتن، کی.ای و همکاران. شبیهسازی گرمایش اقیانوس در قرن بیستم در دریای آموندسن، قطب جنوب غربی. Geophys. Res. Lett. ۴۹ ، e2021GL094566 (2022).
-
اوکانر، جی کی، استیگ، ای جی و حکیم، جی جی. تقویت بادهای غربی نیمکره جنوبی و عمیقتر شدن کم فشار دریای آموندسن در طول قرن بیستم که با ادغام دادههای جایگزین آشکار شده است. Geophys. Res. Lett. ۴۸ ، e2021GL095999 (2021).
-
دالایدن، کیو.، گوس، اچ.، رزسوهزی، جی. و توماس، ای آر. بازسازی گردش جوی و وسعت یخ دریا در غرب قطب جنوب طی ۲۰۰ سال گذشته با استفاده از دادهکاوی. Clim. Dyn. ۵۷ ، ۳۴۷۹–۳۵۰۳ (۲۰۲۱).
-
گراهام، اس. و همکاران. ارزشهای اجتماعی در معرض خطر افزایش سطح دریا. ارزیابی اثرات زیستمحیطی. نسخه ۴۱ ، ۴۵–۵۲ (۲۰۱۳).
-
هینکل، جی. و همکاران. خسارات سیل ساحلی و هزینههای سازگاری تحت تأثیر افزایش سطح آب دریا در قرن بیست و یکم. مجموعه مقالات ملی آکادمی علوم. ۱۱۱ ، ۳۲۹۲–۳۲۹۷ (۲۰۱۴).
-
کرافت، سی. و همکاران. پیشبینی اثرات افزایش شتابان سطح دریا بر خدمات اکوسیستم مردابهای جزر و مدی. مجله محیط زیست. ۷ ، ۷۳-۷۸ (۲۰۰۹).
-
IPCC. تغییرات اقلیمی ۲۰۲۲: تأثیرات، سازگاری و آسیبپذیری. مشارکت گروه کاری II در ششمین گزارش ارزیابی هیئت بین دولتی تغییرات اقلیمی (انتشارات دانشگاه کمبریج، ۲۰۲۲).
-
کریستین، جی. ای.، رابل، ای. ای. و کاتانیا، جی. یک چارچوب احتمالی برای تعیین کمیت نقش تغییرات اقلیمی ناشی از فعالیتهای انسانی در عقبنشینی یخچالهای طبیعی دریایی. کرایوسفر. ۱۶ ، ۲۷۲۵–۲۷۴۳ (۲۰۲۲).
-
اتو، اف ای. انتساب رویدادهای آب و هوایی و اقلیمی. مجله محیط زیست. ۴۲ ، ۶۲۷–۶۴۶ (۲۰۱۷).
-
آشواندن، آ.، بارتولومائوس، تیسی، برینکرهوف، دیجی و ترافر، ام. گزارش مختصر: نقشه راهی برای پیشبینیهای معتبر از سهم صفحات یخی در افزایش سطح دریا. کرایوسفر ۱۵ ، ۵۷۰۵–۵۷۱۵ (۲۰۲۱).
-
نیاس، آیجی، کورنفورد، اسال، ادواردز، تیال، گورملن، ان. و پین، ایجی. ارزیابی عدم قطعیت در پاسخ دینامیکی یخ به گرمایش اقیانوس در فروافتادگی دریای آموندسن، غرب قطب جنوب. ژئوفیزیک. پژوهش. لت. ۴۶ ، ۱۱۲۵۳–۱۱۲۶۰ (۲۰۱۹).
-
نیاس، آیجی، نوویکی، اس.، فلیکسون، دی. و لومیس، بی. مدلسازی سهم متعهدانهی صفحهی یخی گرینلند در افزایش سطح دریا در طول قرن بیست و یکم. مجلهی ژئوفیزیک. پژوهشهای زمینگردی. ۱۲۸ ، e2022JF006914 (2023).
-
آشواندن، آ. و برینکرهوف، د. پیشبینیهای کالیبره شده از دست دادن جرم برای صفحه یخی گرینلند. Geophys. Res. Lett. ۴۹ ، e2022GL099058 (2022).
-
ریتز، سی. و همکاران. افزایش بالقوه سطح دریا از بیثباتی صفحه یخی قطب جنوب، محدود شده توسط مشاهدات. نیچر ۵۲۸ ، ۱۱۵–۱۱۸ (۲۰۱۵).
-
ورنک، آ.، ادواردز، تیال، نیاس، آیجی، هولدن، پیبی و ادواردز، انآر. کالیبراسیون احتمالی مکانی یک مدل با وضوح بالای صفحه یخی فروافتادگی دریای آموندسن با دادههای ارتفاعسنج ماهوارهای. کریوسفر ۱۴ ، ۱۴۵۹–۱۴۷۴ (۲۰۲۰).
-
بوان، اس. و همکاران. پیشبینیهای از دست دادن جرم ورقههای یخی فروافتادگی دریای آموندسن تا سال ۲۰۵۰ با استفاده از مشاهدات تغییر سرعت و ارتفاع کالیبره شده است. مجله گلاسیول . ۱-۱۱ (۲۰۲۳).
-
آسای-دیویس، ایکساس، جوردین، انسی و ناکایاما، وای. پیشرفتها در شبیهسازی و پارامتری کردن تعاملات بین اقیانوس منجمد جنوبی و صفحه یخی قطب جنوب. Curr. Clim. Change Rep. ۳ ، ۳۱۶–۳۲۹ (۲۰۱۷).
-
بردلی، ای.تی.، رزی ویلیامز، سی.، جنکینز، ای. و آرترن، آر. تحلیل مجانبی ستونهای زیریخچالی در محیطهای لایهبندیشده. مجموعه مقالات آر. انجمن علمی ای. ۴۷۸ ، ۲۰۲۱۰۸۴۶ (۲۰۲۲).
-
بردلی، ایتی، دی ریدت، جی.، بت، دیتی، دوتریو، پی. و هالند، پی.آر. دینامیک یخ و پاسخ ذوب شدن یخفشان جزیره پاین به زایش. مجله آن. گلاسیول. ۱–۵ (۲۰۲۳).
-
Seroussi, H. و همکاران. عقبنشینی مداوم یخچال Thwaites، قطب جنوب غربی، کنترلشده توسط توپوگرافی بستر و گردش اقیانوسی. Geophys. Res. Lett. ۴۴ ، ۶۱۹۱–۶۱۹۹ (۲۰۱۷).
-
اسنو، ک. و همکاران. واکنش صفحات یخی به تغییرات اقلیمی. Geophys. Res. Lett. ۴۴ ، ۱۱۸۷۸–۱۱۸۸۵ (۲۰۱۷).
-
دی ریدت، جی. و گودموندسون، جی اچ. مدلسازی توأمان یخفشان-اقیانوس و عقبنشینی خط اتصال زمین پیچیده از یک پشته بستر دریا. مجله ژئوفیزیک. پژوهشها. گشت و گذار در زمین. ۱۲۱ ، ۸۶۵–۸۸۰ (۲۰۱۶).
-
فاویر، ال. و همکاران. ارزیابی پارامترهای ذوب زیرقفسه با استفاده از مدل جفتشده اقیانوس-یخبرگ nemo (نسخه ۳٫ ۶)-elmer/ice (نسخه ۸٫ ۳). Geosci. Model Dev. ۱۲ ، ۲۲۵۵–۲۲۸۳ (۲۰۱۹).
-
وبر، بی. جی. و همکاران. مکانیسمهای مؤثر بر تغییرپذیری در نیروی اقیانوسی یخچال طبیعی جزیره پاین. Nat. Commun. ۸ ، ۱۴۵۰۷ (۲۰۱۷).
-
دوتریو، پی. و همکاران. حساسیت شدید ذوب شدن یخهای جزیره پاین به تغییرات اقلیمی. مجله ساینس، شماره ۳۴۳ ، صفحات ۱۷۴ تا ۱۷۸ (۲۰۱۴).
-
جوردین، کارولینای شمالی، متیوت، پی.، بورگارد، سی.، کایلت، جی. و کیتل، سی. نرخ ذوب پایه یخ در دریای آموندسن در پایان قرن بیست و یکم. Geophys. Res. Lett. ۴۹ ، e2022GL100629 (2022).
-
شپرد، آ.، وینگهام، د. و ریگنات، ای. اقیانوس گرم در حال فرسایش صفحه یخی غرب قطب جنوب است. Geophys. Res. Lett. ، ۳۱ ، L23402 (2004).
-
پریچارد، اچ. و همکاران. از دست رفتن صفحه یخی قطب جنوب ناشی از ذوب شدن پایه صفحات یخی. نیچر ۴۸۴ ، ۵۰۲–۵۰۵ (۲۰۱۲).
-
بورگارد، سی.، جوردین، کارولینای شمالی، ریس، آر.، جنکینز، ای. و متیوت، پی. ارزیابی پارامترهای ذوب پایه برای صفحات یخی قطب جنوب. کرایوسفر. ۶ ، ۴۹۳۱–۴۹۷۵ (۲۰۲۲)
-
لازرومز، دبلیو.ام.، جنکینز، ای.، گودموندسون، جی.اچ. و ون دی وال، آر.اس. مدلسازی نرخ ذوب پایه فعلی برای یخهای قطب جنوب با استفاده از پارامتریسازی تودههای شناور آب ذوبشده. کرایوسفر ۱۲ ، ۴۹–۷۰ (۲۰۱۸).
-
وارگو، ال.جی و همکاران. گرمایش انسانی باعث از دست رفتن شدید جرم سالانه یخچالهای طبیعی میشود. Nat. Clim. Change ۱۰ ، ۸۵۶–۸۶۱ (۲۰۲۰).
-
رو، جی اچ، کریستین، جی ای و مارزیون، بی. در باب نسبت دادن از دست دادن جرم یخچالهای طبیعی دوران صنعتی به تغییرات اقلیمی ناشی از فعالیتهای انسانی. کرایوسفر ۱۵ ، ۱۸۸۹–۱۹۰۵ (۲۰۲۱).
-
سوراوی-استپنی، تی.، هاگ، ای.ای.، کورنفورد، اس.ال. و دیویسون، بی.جی. تغییر دینامیکی اپیزودیک مرتبط با آسیب در زبان یخی یخچال توایتز. نات. ژئوشیمی. ۱۶ ، ۳۷-۴۳ (۲۰۲۳).
-
لیو، وای. و همکاران. نازک شدن یخهای قطب جنوب توسط اقیانوس، جدا شدن کوه یخ و عقبنشینی صفحات یخی قطب جنوب را افزایش میدهد. مجموعه مقالات علمی ملی. ۱۱۲ ، ۳۲۶۳–۳۲۶۸ (۲۰۱۵).
-
دکونتو، آر. ام و پولارد، دی. سهم قطب جنوب در افزایش سطح آب دریا در گذشته و آینده. نیچر ۵۳۱ ، ۵۹۱–۵۹۷ (۲۰۱۶).
-
جوگین، آی.، اسمیت، بی. ای. و شوف، سی. جی. قوانین اصطکاک کولمب منظم برای لغزش ورقه یخ: کاربرد در یخچال طبیعی جزیره پاین، قطب جنوب. ژئوفیزیک. پژوهش. لت. ۴۶ ، ۴۷۶۴–۴۷۷۱ (۲۰۱۹).
-
میلشتاین، جی. دی.، مینچیو، بی. ام. و پگلر، اس. اس. ویسکوزیته یخ نسبت به آنچه معمولاً تصور میشود، به تنش حساستر است. Commun. Earth Environ. ۳ ، ۵۷ (۲۰۲۲).
-
Seroussi, H. & Morlighem, M. نمایش ذوب پایه در خط پایه در مدلهای جریان یخ. Cryosphere ۱۲ ، ۳۰۸۵–۳۰۹۶ (۲۰۱۸).
-
وان، دیجی و آرترن، آر. چرا پیشبینی آیندهی صفحات یخی دشوار است؟ Science ۳۱۵ ، ۱۵۰۳–۱۵۰۴ (۲۰۰۷).
-
روبل، ای.ای.، سروسی، اچ. و رو، جی.اچ. بیثباتی صفحات یخ دریایی، عدم قطعیت در پیشبینیهای افزایش سطح دریا در آینده را تشدید و منحرف میکند. مجموعه مقالات علمی ملی. ۱۱۶ ، ۱۴۸۸۷–۱۴۸۹۲ (۲۰۱۹).
-
هاوکینز، ای.، اسمیت، آر. اس.، گرگوری، جی. ام. و استینفورث، دی. ای. عدم قطعیت کاهشناپذیر در پیشبینیهای اقلیمی کوتاهمدت. Clim. Dyn. ۴۶ ، ۳۸۰۷–۳۸۱۹ (۲۰۱۶).
-
استات، پی. چگونه تغییرات اقلیمی بر رویدادهای شدید آب و هوایی تأثیر میگذارد. مجله ساینس ، شماره ۳۵۲ ، صفحات ۱۵۱۷ تا ۱۵۱۸ (۲۰۱۶).
-
کورنفورد، اس. ال و همکاران. نتایج سومین پروژه مقایسه متقابل مدل صفحات یخی دریایی (MISMIP+). کرایوسفر ۱۴ ، ۲۲۸۳–۲۳۰۱ (۲۰۲۰).
-
جینز، ای. تی. نظریه احتمال: منطق علم (انتشارات دانشگاه کمبریج، ۲۰۰۳).
-
آرترن، آر.جی. بررسی استفاده از گروههای تبدیل پیشین و روش حداکثر آنتروپی نسبی برای وارونگیهای یخچالشناسی بیزی. مجله یخچالشناسی. ۶۱ ، ۹۴۷–۹۶۲ (۲۰۱۵).
-
ریس، ر.، گودموندسون، جی اچ، لورمن، ای. و وینکلمن، آر. دامنهی نازک شدن صفحات یخی در قطب جنوب. مجلهی Nat. Clim. Change ۸ ، ۵۳–۵۷ (۲۰۱۸).
-
فورست، جیجی و همکاران. نوار ایمنی صفحات یخی قطب جنوب. Nat. Clim. Change ۶ ، ۴۷۹–۴۸۲ (۲۰۱۶).
-
آرترن، آر.جی و ویلیامز، سی.آر. حساسیت غرب قطب جنوب به بازخورد ذوب شدن زیردریایی. Geophys. Res. Lett. ۴۴ ، ۲۳۵۲–۲۳۵۹ (۲۰۱۷).
-
دی ریدت، جی.، ریس، آر.، پائولو، اف. اس و گودموندسون، جی. اچ. عوامل افزایش سرعت یخچالهای طبیعی جزیره پاین بین سالهای ۱۹۹۶ تا ۲۰۱۶. کرایوسفر ۱۵ ، ۱۱۳–۱۳۲ (۲۰۲۱).
-
مدلی، ب. و همکاران. محدود کردن تعادل جرم اخیر یخچالهای طبیعی جزیره پاین و توایتس، غرب قطب جنوب، با مشاهدات هوایی از تجمع برف. کریوسفر ۸ ، ۱۳۷۵–۱۳۹۲ (۲۰۱۴).
-
بردلی، ایتی، آرترن، آرجی، ویلیامز، سیآر، بت، دیتی و بایرن، جی. WAVI.jl: مدلسازی پهنههای یخی در جولیا.
-
گلدبرگ، دی. ان. یک تقریب مشتقشده از تغییرات و یکپارچهشده با عمق برای یک مدل جریان یخچالشناسی مرتبه بالاتر. مجله یخچالشناسی. ۵۷ ، ۱۵۷–۱۷۰ (۲۰۱۱).
-
هالند، پی آر، جنکینز، ای. و هالند، دی ام. واکنش ذوب شدن پایه یخهای قطبی به تغییرات دمای اقیانوس. مجله Clim. ۲۱ ، ۲۵۵۸–۲۵۷۲ (۲۰۰۸).
-
جوردین، کارولینای شمالی و همکاران. پروتکلی برای محاسبه نرخ ذوب پایه در پیشبینیهای صفحات یخی قطب جنوب ISMIP6. Cryosphere ۱۴ ، ۳۱۱۱–۳۱۳۴ (۲۰۲۰).
-
مارشال، جی.، هیل، سی.، پرلمن، ال. و ادکرافت، ای. مدلسازی اقیانوس هیدرواستاتیک، شبه هیدرواستاتیک و غیرهیدرواستاتیک. مجله ژئوفیزیک. پژوهشهای اقیانوسها ۱۰۲ ، ۵۷۳۳–۵۷۵۲ (۱۹۹۷).
-
مکدوگال، تیجی، جکت، دیآر، رایت، دیجی و فیستل، آر. الگوریتمهای دقیق و از نظر محاسباتی کارآمد برای دما و چگالی بالقوه آب دریا. مجله اتمسفر. اقیانوس. فناوری. ۲۰ ، ۷۳۰–۷۴۱ (۲۰۰۳).
-
پاکانوفسکی، آر. و فیلاندر، اس. پارامترسازی اختلاط عمودی در مدلهای عددی اقیانوسهای گرمسیری. مجله فیزیک اقیانوسشناسی. ۱۱ ، ۱۴۴۳–۱۴۵۱ (۱۹۸۱).
-
هالند، دیام و جنکینز، ای. مدلسازی برهمکنشهای ترمودینامیکی یخ-اقیانوس در پایه یک صفحه یخی. مجله فیزیک اقیانوسشناسی. ۲۹ ، ۱۷۸۷–۱۸۰۰ (۱۹۹۹).
تقدیرنامهها
ATB، DTB، PRH، CRW و RJA توسط کمکهزینه NERC NE/S010475/1 پشتیبانی میشوند. ATB، DTB و PRH توسط پروژه PROTECT پشتیبانی میشوند که از برنامه تحقیق و نوآوری Horizon 2020 اتحادیه اروپا تحت توافقنامه کمکهزینه شماره ۸۶۹۳۰۴ و کمکهزینه PROTECT شماره ۸۹ بودجه دریافت کرده است. JDR توسط پروژه TiPACCs پشتیبانی میشود که از برنامه تحقیق و نوآوری Horizon 2020 اتحادیه اروپا تحت توافقنامه کمکهزینه شماره ۸۲۰۵۷۵ بودجه دریافت میکند. JDR توسط یک بورسیه رهبران آینده UKRI (MR/W011816/1) پشتیبانی شد. این کار از سرویس ابررایانه ملی ARCHER2 انگلستان ( https://www.archer2.ac.uk ) استفاده کرد.
اعلامیههای اخلاقی
منافع رقابتی
نویسندگان هیچ گونه تضاد منافعی را اعلام نمیکنند.
بررسی همتا
اطلاعات بررسی همتا
ارتباطات زمین و محیط زیست از آندریاس ورنک و دیگر داور (یا داوران) ناشناس به خاطر مشارکتشان در بررسی دقیق این اثر تشکر میکند. ویراستاران اصلی: شین سوگیاما، هایکه لانگنبرگ. فایل بررسی دقیق موجود است.
اطلاعات تکمیلی
یادداشت ناشر: اشپرینگر نیچر در مورد ادعاهای مربوط به صلاحیت قضایی در نقشههای منتشر شده و وابستگیهای سازمانی بیطرف باقی میماند.
اطلاعات تکمیلی
حقوق و مجوزها
دسترسی آزاد این مقاله تحت مجوز بینالمللی Creative Commons Attribution 4.0 منتشر شده است که استفاده، اشتراکگذاری، اقتباس، توزیع و تکثیر در هر رسانه یا قالبی را مجاز میداند، مادامی که به نویسنده(گان) اصلی و منبع، ارجاع مناسب داده شود، پیوندی به مجوز Creative Commons ارائه شود و در صورت ایجاد تغییرات، مشخص شود. تصاویر یا سایر مطالب شخص ثالث در این مقاله در مجوز Creative Commons مقاله گنجانده شدهاند، مگر اینکه در خط اعتباری مطلب، خلاف آن ذکر شده باشد. اگر مطلبی در مجوز Creative Commons مقاله گنجانده نشده باشد و استفاده مورد نظر شما طبق مقررات قانونی مجاز نباشد یا از حد مجاز تجاوز کند، باید مستقیماً از دارنده حق چاپ اجازه بگیرید. برای مشاهده نسخهای از این مجوز، به http://creativecommons.org/licenses/by/4.0/ مراجعه کنید .
درباره این مقاله

به این مقاله استناد کنید
بردلی، ایتی، بت، دیتی، هالند، پیآر و همکاران. چارچوبی برای تخمین سهم فعالیتهای انسانی در افزایش سطح آب دریا در قطب جنوب در یک محیط مصنوعی. Commun Earth Environ ۵ ، ۱۲۱ (۲۰۲۴). https://doi.org/10.1038/s43247-024-01287-w
- دریافت شده
- پذیرفته شده
- منتشر شده
- نسخه رکورد
- DOIhttps://doi.org/10.1038/s43247-024-01287-w
این مقاله مورد استناد قرار گرفته است
-
محاسبات سناریوهای افزایش شدید سطح دریا به شدت به وضوح مدل صفحات یخی وابسته است
ارتباطات، زمین و محیط زیست (۲۰۲۵)