
یک الگوریتم بهبود یافته برنامهریزی مسیر PSO-ABC برای پهپادها بر اساس ساختار توپولوژی حریم هوایی شهری با دادههای واقعی GIS
گزارشهای علمی حجم ۱۶ ، شماره مقاله: ۵۰۴۸ ( ۲۰۲۶ )
چکیده
در این مقاله، یک الگوریتم بهبود یافته بهینهسازی ازدحام ذرات – کلونی زنبور مصنوعی (PSO-ABC) برای برنامهریزی مسیر عملیات پهپادها (UAV) بر اساس ساختار توپولوژی حریم هوایی شهری ارائه شده است. ابتدا مکانیزمی برای ساخت یک توپولوژی حریم هوایی با ارزیابی امکانسنجی حریم هوایی شهری مشخص معرفی میشود. در این مکانیزم، یک حریم هوایی شهری کامل به تعداد زیادی وکسل گسستهسازی میشود و دو شاخص در آن گنجانده میشود که عبارتند از در دسترس بودن حریم هوایی شهری و ریسک زمینی شهری. مورد اول با تجزیه و تحلیل اتصال وکسلهای شهری با تمرکز بر تأثیرات ساختمانهای شهری و سایر ویژگیها، کمیسازی میشود. مورد دوم از یک مدل تخمین ریسک موجود برای ایجاد یک نقشه ریسک استفاده میکند که توزیع ریسک زمینی اعمال شده توسط عملیات پهپاد را توصیف میکند. بر اساس این دو شاخص، امکانسنجی حریم هوایی با استفاده از یک تحلیل ربعی و یک مرتبسازی پارتو به ترتیب برای تولید یک توپولوژی حریم هوایی با دادههای واقعی GIS شهری ارزیابی میشود. در این توپولوژی حریم هوایی ساختهشده، با در نظر گرفتن سطوح ایمنی مناطق زمینی، محدودیتهای عملکرد پهپادها و مناطق پرواز ممنوع تعریفشده در شهر، یک استراتژی جستجوی سراسری و محلی با ترکیب دو الگوریتم اکتشافی، که PSO برای جستجوی سراسری و الگوریتم ABC برای جستجوی محلی هستند، پیشنهاد شده است. یک الگوریتم برنامهریزی PSO-ABC بهبودیافته برای عملیات پهپاد با استفاده از توپولوژی حریم هوایی شهری شکل گرفته است. یک منطقه شهری در منطقه چانگکینگ، شهر جینان به عنوان سناریوی آزمایشی برای انجام تجزیه و تحلیل شبیهسازی در نظر گرفته شده است. نتایج تجربی نشان میدهد که عملکرد الگوریتم پیشنهادی با همواری مسیر بالا و سرعت همگرایی سریع، بهترین عملکرد را دارد. روش پیشنهادی به طور قابل توجهی پایداری و استحکام راهحل برنامهریزی مسیر را بهبود میبخشد.
محتوای مشابه توسط دیگران مشاهده میشود


مقدمه
با اصلاحات عمیق در مدیریت حریم هوایی ارتفاع پایین، وسایل نقلیه هوایی بدون سرنشین (پهپادها) در حریم هوایی ارتفاع پایین محبوبیت بیشتری پیدا کردهاند و میتوانند ماموریتهای زیادی را انجام دهند. با این حال، تهدید قابل توجهی برای ایمنی عمومی و زیرساختهای زمینی ایجاد میشود. دلیل این امر آن است که محیط بدون ساختار ارتفاع پایین که با تراکم بالای ساختمانهای شهری تشکیل شده است، خطرات عمدهای را برای عملیات ایمن پهپادها ایجاد میکند. نکته قابل توجهتر این است که پرسنل زمینی و وسایل نقلیه توسط پهپادهای سقوط کرده در معرض خطر قرار میگیرند که منجر به افزایش قابل توجه ریسک میشود. با توجه به این مشکلات، ساخت یک روش برنامهریزی ایمن پهپاد که با ارتفاع پایین پیچیده در محیطهای شهری سازگار باشد، به روشی ضروری برای مدیریت تحرک هوایی شهری (UAM) تبدیل شده است. ۱ ، ۲
با هدف قرار دادن مسئله مدلسازی فضای هوایی شهری، چگونگی حل مسئله تخصیص منابع فضای هوایی شهری و اجتناب از موانع پهپادها به یک زمینه تحقیقاتی داغ تبدیل شده است. برترام ۳ یک ساختار فضای هوایی از یک قیف دایرهای متحدالمرکز ساخت و برنامهریزی مسیر بر اساس این ساختار و همچنین اجتناب از برخورد محقق شد. کوون ۴ فضای هوایی شهری را بر اساس ارتفاع ساختمانها طبقهبندی کرد و نقشهای برای عملیات پهپادها ایجاد کرد. جانگ ۵ یک روش طراحی فضای هوایی را بر اساس کنترل جریان ترافیک پهپادها معرفی کرد و فضای هوایی شهری بر اساس ارتفاع ساختمانها و انواع پهپادها به سطوح مختلف تقسیم شد. اسپیرکوفسکا ۶ یک شاخص چگالی پویا از توپولوژی فضای هوایی شهری را بر اساس شاخص چگالی مدیریت ترافیک هوایی سنتی پیشنهاد کرد. لی ۷ مدلی از شبکه ترافیک فضای هوایی ساخت که گرهها و پیوندهای آن نقاط برخاست و فرود پهپادها و کانالهای اتصال فضای هوایی هستند. سونیل ۸ یک روش طراحی شبکه فضای هوایی شهری را بر اساس خط لوله و منطقه پیشنهاد کرد. پهپاد میتواند برای یک بار در این خط لوله پرواز کند و میتواند چندین بار در این منطقه فعالیت کند. شرستا ۹ تحقیق عمیقی در مورد ساختار حریم هوایی برای عملیات پهپادها بر اساس فناوری ارتباطات نسل ششم انجام داد که در آن کریدورها در داخل یا بین لایهها در جهات افقی، عمودی و مورب طراحی و متصل شدند. تانگ ۱۰ روشی برای طبقهبندی حریم هوایی پیشنهاد کرد که ارتفاع ۴۰۰ فوت را به عنوان حریم هوایی عملیات پهپاد و ارتفاع ۵۰۰ تا ۱۴۰۰ فوت را به عنوان حریم هوایی حمل و نقل بار و مسافر شهری و بین شهری تعیین میکند. تانگ ۱۱ و وانگ ۱۲ نوعی روش تقسیمبندی پویای حریم هوایی را بر اساس مرز پارتو برای کاهش مشکل تراکم ترافیک هوایی پیشنهاد کردند.
برای مسئله برنامهریزی مسیر برای عملیات پهپاد در حریم هوایی ارتفاع پایین، روشهای کلی شامل الگوریتم اکتشافی ۱۳ ، الگوریتم بهینهسازی ریاضی ۱۴ ، روش میدان پتانسیل ۱۵ و روش نظریه گراف ۱۶ هستند . الگوریتم بهینهسازی اکتشافی، مانند الگوریتم کلونی مورچهها (ACO) ۱۷ ، الگوریتم بهینهسازی ازدحام ذرات (PSO) ۱۸ ، الگوریتم ژنتیک (GA) ۱۹ ، الگوریتم کلونی زنبور مصنوعی (ABC) ۲۰ و الگوریتم A* ۲۱ ، با استفاده از یک معیار محاسبه قابل قبول، راهحلهای بهینه را پیدا میکنند. مادریدانو ۲۲ یک روش برنامهریزی چند مسیری برای خوشههای پهپاد بر اساس یک نقشه راه احتمالی سهبعدی (PRM) در حریم هوایی ارتفاع پایین پیشنهاد کرد. لو ۲۳ از الگوریتم ACO برای جداسازی فرومونها بر اساس مزایا و معایب آن با استحکام بالا و بازخورد مثبت استفاده کرد که کارایی تقویت فرومونها و برنامهریزی مسیر را بهبود میبخشد. بائو ۲۴ یک تابع اکتشافی و مکانیزم جستجوی محلی برای ACO بر اساس ضریب زاویه بهبود یافته برای حل نرخ پایین همگرایی پیشنهاد داد. یون ۲۵ یک مدل بهینهسازی برای مسئله مسیریابی در یک سیستم تحویل ترکیبی کامیون-ربات، با در نظر گرفتن ناهمگنی ربات و محدودیتهای مدیریت باتری، توسعه داد و اثربخشی رویکرد مسیریابی پیشنهادی را در سناریوهای مکانی مختلف از طریق آزمایشهای عددی تأیید کرد. شو ۲۶ یک PSO چند هدفه بهبود یافته برای تحقق برنامهریزی مسیر برای پهپادهای چرخان (R-UAVs) پیشنهاد کرد که اهداف ارتفاع پرواز، طول مسیر و زاویه چرخش را در نظر میگیرد. ساریم ۲۷ یک روش برنامهریزی خطی عدد صحیح مختلط را پیشنهاد کرد که مسیر پهپاد را با یک اصلاح هموارتر میکند. فن ۲۸ یک روش میدان پتانسیل مصنوعی (APF) را بر اساس هدایت شش ضلعی متساویالاضلاع پیشنهاد کرد که میتواند مشکل حداقل محلی در تولید مسیر را حل کند. یون ۲۹ یک مدل مسیریابی برای یک سیستم تحویل ترکیبی کامیون-ربات ارائه داد که استراتژیهای مدیریت باتری را در بر میگیرد و اثربخشی آن را در سناریوهای شهری و روستایی از طریق آزمایشهای عددی تأیید کرد. الگوریتمهای برنامهریزی مسیر پهپاد مبتنی بر نظریه گراف شامل الگوریتم دیجسترا، نمودار ورونوی، نمودار مسیر احتمالی و غیره هستند. علاوه بر این، یادگیری ماشین ۳۰ ، ۳۱ ، ۳۲ ، کنترل پیشبین مدل ۳۳ ، ۳۴ و نظریه بازیها ۳۵ نیز میتوانند در برنامهریزی مسیر پهپادها اعمال شوند.
در این مقاله، یک روش بهبود یافته برنامهریزی مسیر PSO-ABC برای عملیات پهپادها بر اساس ساختار توپولوژی حریم هوایی شهری ارائه شده است. با در نظر گرفتن شاخصهای در دسترس بودن حریم هوایی شهری و ریسک زمینی شهری، امکانسنجی یک حریم هوایی شهری به طور دقیق ارزیابی میشود و میتوان توپولوژی حریم هوایی شهری بیشتری را بر اساس گسستهسازی کل حریم هوایی ساخت. مورد اول با تجزیه و تحلیل اتصال وکسلهای شهری با تمرکز بر تأثیرات ساختمانهای شهری و سایر ویژگیها، کمیسازی میشود. مورد دوم از یک مدل تخمین ریسک موجود برای تولید نقشه ریسکی استفاده میکند که توزیع ریسک زمینی اعمال شده توسط عملیات پهپادها را توصیف میکند. بر اساس این دو شاخص، امکانسنجی حریم هوایی با استفاده از تحلیل ربعی و مرتبسازی پارتو به ترتیب برای تولید یک توپولوژی حریم هوایی با دادههای GIS شهری واقعی ارزیابی میشود. با استفاده از توپولوژی حریم هوایی شهری ساخته شده، یک استراتژی جستجوی سراسری و محلی با ترکیب دو نوع الگوریتم اکتشافی، که PSO برای جستجوی سراسری و ABC برای جستجوی محلی هستند، پیشنهاد میشود. با در نظر گرفتن سطوح ایمنی مناطق زمینی، محدودیتهای عملکرد پهپادها و مناطق پرواز ممنوع تعریف شده در شهر، یک الگوریتم برنامهریزی PSO-ABC بهبود یافته برای عملیات پهپاد با استفاده از توپولوژی حریم هوایی شهری شکل گرفته است. یک منطقه شهری در منطقه چانگکینگ، شهر جینان به عنوان سناریوی آزمایشی برای انجام تحلیل شبیهسازی در نظر گرفته شده است. نتایج نشان میدهد که هم پایداری و هم استحکام روش پیشنهادی تضمین شده است.
ادامه این مقاله به شرح زیر ساختار یافته است. بخش ۲ نحوه ساخت توپولوژی حریم هوایی شهری را ارائه میدهد. الگوریتم بهبود یافته برنامهریزی مسیر پهپاد PSO-ABC در توپولوژی حریم هوایی شهری در بخش ۳ ارائه شده است. بخش ۴ شبیهسازیهای تجربی و تحلیل نتایج را ارائه میدهد. بخش ۵ خلاصهای از این مقاله را ارائه میدهد.
ساخت توپولوژی حریم هوایی شهری
ساخت توپولوژی حریم هوایی شهری، پایه و اساس برنامهریزی مسیر پهپاد است که کیفیت آن تأثیر زیادی بر عملیات پهپاد خواهد داشت. به دلیل ویژگیهای توزیع فضایی بسیار متراکم، متنوع و ناهموار موانع در حریم هوایی شهری ۳۶ ، در این مقاله از نوعی روش شبکه متقاطع برای گسستهسازی حریم هوایی شهری سهبعدی استفاده شده است. علاوه بر این، به منظور تعیین دقیق میزان دسترسی به حریم هوایی شهری، یک حریم هوایی شهری در یک منطقه مشخص به چندین سطح پروازی تقسیم میشود که در شکل ۱ نشان داده شده است . همانطور که در شکل ۱ نشان داده شده است ، در مجموع نه سطح پرواز با فاصله ۵ متر در حریم هوایی شهری تقسیم شده وجود دارد. این ساختار حریم هوایی مبتنی بر سطح پرواز، کاهش ابعادی را محقق میکند که با تضمین یکپارچگی قابل توجه اطلاعات محیطی، کارایی و امکانسنجی الگوریتم برنامهریزی مسیر را بهبود میبخشد. در این شرایط، چگونگی ایجاد شاخص دسترسی به حریم هوایی شهری در یک سطح پرواز مشخص، به همراه ساخت توپولوژی حریم هوایی شهری، محور این بخش میشود.

ساختار حریم هوایی مبتنی بر سطح پرواز.
شاخص ارزیابی حریم هوایی شهری
مکانیسم ارزیابی حریم هوایی شهری که قبلاً بر اساس دو شاخص پیشنهاد شده بود، معرفی میشود که عبارتند از در دسترس بودن حریم هوایی شهری و ریسک جمعیت زمینی ۳۷٫ در دسترس بودن حریم هوایی شهری با تجزیه و تحلیل اتصال حریم هوایی شهری اندازهگیری میشود و از یک مدل تخمین ریسک برای تعیین کمیت ریسک برای جمعیت زمینی استفاده میشود.
شاخص دسترسی به حریم هوایی شهری
شاخص در دسترس بودن حریم هوایی شهری برای اندازهگیری اینکه آیا پهپادها میتوانند با خیال راحت و کارآمد در حریم هوایی کم ارتفاع شهری فعلی عمل کنند، تعریف میشود، که سپس عملیات هماهنگ پهپادها را در حریم هوایی شهری تضمین میکند.
در مرحله اول، میتوان با محاسبه میانگین پوشش در شعاع r که به صورت α(n, m) بیان میشود، میزان دسترسی به حریم هوایی شهری هر شبکه را بدست آورد . n نقطه شبکه شروع و m نقطه شبکه هدف است. α(n, m) اندازهگیری میکند که آیا اتصال کافی از نقطه شبکه شروع n تا نقطه شبکه هدف m وجود دارد یا خیر. در این صورت، پهپادها میتوانند ضمن اجتناب از همه موانع و ساختمانهای موجود در حریم هوایی، عملیات خود را انجام دهند. معادله ( ۱ ) نحوه بدست آوردن میزان دسترسی به حریم هوایی شهری را نشان میدهد . در این معادله، α( n, m ) تعداد شبکهها در یک مجموعه شبکه N است . اگر تعداد شبکهها در منطقه تحت پوشش کمتر یا مساوی ۱ باشد، در دسترس بودن حریم هوایی شهری روی ۰ تنظیم میشود. شاخص در دسترس بودن حریم هوایی بین ۰ و ۱ محدود میشود. پوشش سطح پرواز i از نقطه شبکه شروع n تا نقطه شبکه هدف m است ، J نشاندهنده مجموعه جفت نقاط شبکه متوالی در طول مسیر از نقطه شبکه شروع n تا نقطه شبکه هدف m است .
دوم، کل حریم هوایی شهری بر اساس ارتفاع h به نه سطح پروازی تقسیم میشود . یک سطح پرواز i ( ) برای تجزیه و تحلیل آسان به شبکههای مربعی زیادی گسسته شده است که در شکل ۲ نشان داده شده است . شبکه قرمز نشان دهنده یک نقطه شبکه شروع، شبکه زرد نشان دهنده یک نقطه شبکه هدف و شبکههای سیاه نشان دهنده موانع هستند. در این مقاله، در دسترس بودن حریم هوایی شهری بر اساس اندازهگیری این است که آیا پهپادها میتوانند از طریق محاسبه پوشش به مکانهای دیگر در یک محدوده خاص برسند یا خیر. پوشش یک سطح پرواز i با استفاده از معادله ( ۲ ) محاسبه میشود . در این معادله، تعداد جهشهای مسیر باز است که نشان دهنده کوتاهترین جهش از نقطه شبکه شروع n تا نقطه شبکه هدف m در یک محیط بدون مانع است. به طور مشابه، به عنوان گامهای مسیر محدود کوتاهترین گام از نقطه شبکه شروع n تا نقطه شبکه هدف m در یک محیط بدون مانع تعریف میشود. با توجه به تأثیر موانع بر مسیر پهپاد، اگر باشد ، به این معنی است که یک پهپاد نمیتواند در یک محیط بدون مانع به هدف برسد. نشان میدهد که مسیر قابل دسترسی نیست.C_R^i(n, m) O_{\text {phops}}(n, m) C_{\text {phops}}(n, m) C_{\text {phops}}(n, m) = 0 C_R^i(n, m) = 0

تقسیمبندی حریم هوایی یک سطح پرواز با/بدون مانع: ( الف ) تقسیمبندی حریم هوایی بدون مانع. ( ب ) تقسیمبندی حریم هوایی با موانع.
شاخص ریسک زمین شهری
به منظور توصیف جامع امکانسنجی حریم هوایی شهری، در این مقاله، یک مدل شاخص ریسک زمینی شهری معرفی شده است که میزان مرگ و میر پرسنل زمینی و خسارات مالی ناشی از پهپادهای از کار افتاده را از سطوح مختلف پروازی کمّی میکند. با توجه به تراکم بالای جمعیت و توزیع ناهموار آن و همچنین وجود ساختمانهای بلندمرتبه متراکم و متنوع ۳۸ ، کمّیسازی ریسک زمینی شهری دشوار است. بنابراین، چگونگی توصیف دقیق تراکم جمعیت زمینی و توزیع ساختمانهای شهری برای مدل شاخص ریسک زمینی شهری که عملیات ایمن پهپادها را در حریم هوایی شهری تضمین میکند، مهم است. از یک روش ارزیابی ریسک ۳۷ که قبلاً پیشنهاد شده است، برای محاسبه ریسک تحمیل شده به افراد زمینی مرتبط با عملیات پهپاد استفاده میشود.
این مدل دو نوع خطر زمینی ناشی از عملیات پهپادها را در نظر میگیرد. مورد اول، خطر مرگ پرسنل زمینی ناشی از نقص پهپاد، شامل خطر مستقیم مرگ ناشی از برخورد با عابران پیاده زمینی و خطر غیرمستقیم مرگ پرسنل ناشی از تصادف با وسایل نقلیه زمینی است. مورد دوم، خطر خسارت مالی ناشی از برخورد پهپادها با زیرساختها یا ساختمانهای روی زمین است. شکل ۳ نمودار دو نوع خطر زمینی در محیطهای شهری را نشان میدهد.

دو نوع خطر زمینی.
مدل ریسک مرگ و میر برای پرسنل زمینی، دو سناریو را پس از نقص پهپاد در نظر میگیرد: ریسک مرگ و میر ناشی از برخورد مستقیم با عابر پیاده و ریسک مرگ و میر غیرمستقیم ناشی از برخورد با وسیله نقلیه زمینی. همانطور که در معادله ( ۳ ) نشان داده شده است.
در معادله، نشان دهنده خطر مرگ و میر برای پرسنل زمینی است که بر حسب تعداد مرگ و میر در هر ساعت پرواز بیان میشود. عبارت نشان دهنده خطر مرگ و میر ناشی از برخورد مستقیم با یک عابر پیاده در صورت سقوط پهپاد است که آن هم بر حسب تعداد مرگ و میر در هر ساعت پرواز اندازهگیری میشود. در نهایت، خطر مرگ و میر برای پرسنل است که به طور غیرمستقیم ناشی از برخورد پهپاد با یک وسیله نقلیه زمینی است.
برای محاسبه خطر خسارت مالی ناشی از برخورد پهپاد با زیرساختها یا ساختمانهای حیاتی پس از نقص در حین پرواز، فاصله خط دید بین پهپاد و این سازههای زمینی در نظر گرفته میشود. وقتی این فاصله از یک آستانه مشخص پایینتر بیاید، سطح ایمنی به طور قابل توجهی کاهش مییابد. این مقاله از توزیع لگاریتمی نرمال برای مدلسازی توزیع آماری ارتفاع ساختمانهای شهری استفاده میکند . مدل خسارت مالی، که مربوط به ارتفاع ساختمان است، در معادله ( ۴ ) و معادله ( ۵ ) ارائه شده است. در معادله ( ۵ )، مدل خسارت مالی را نشان میدهد، در حالی که و به ترتیب میانگین و انحراف معیار متغیر لگاریتمی هستند.c_{r\_{ad}} \mu \sigma
با توجه به توزیع پراکنده جمعیت زمینی، تراکم وسایل نقلیه و ساختمانهای شهری، فضای هوایی شهری به تعداد زیادی وکسل تقسیم میشود تا مدیریت انعطافپذیری از عملیات پهپادها محقق شود. به منظور ارزیابی ریسک یک سطح پرواز مشخص، ریسک هر وکسل به شرح زیر ارزیابی میشود. ابتدا، تراکم جمعیت یک منطقه شهری استخراج میشود. سپس به شبکههای گسسته دوبعدی روی زمین نگاشت میشود. پس از آن، برای هر شبکه زمینی، ریسک جمعیت بر اساس تراکم جمعیت زمینی و احتمال سقوط پهپاد محاسبه میشود. به طور خاص، ریسک مرگ افراد زمینی و ریسک خسارت به اموال ،d به طور جداگانه محاسبه میشوند. این دو با ضرایب وزنی مختلف با هم ترکیب میشوند تا مدل شاخص ریسک کل زمین شهری C ، همانطور که در معادله ( ۶ ) نشان داده شده است، به دست آید.
در معادله، ، و ، ضرایب نرمالسازی هستند که به صورت معکوس حداکثر مقدار متغیر مربوطه محاسبه میشوند.
ارزیابی امکانسنجی حریم هوایی شهری با تحلیل کوادرانت
پس از بدست آوردن شاخصهای دسترسی به حریم هوایی شهری و خطر زمینی شهری، از تحلیل ربعی برای انجام ارزیابی امکانسنجی حریم هوایی شهری استفاده میشود. این دو شاخص با تعریف آستانههایی برای این دو شاخص، به یک سیستم مختصات دوبعدی نگاشت میشوند. همبستگی بین دسترسی به حریم هوایی شهری و خطر زمینی شهری در ابعاد مختلف با توجه به توزیع ربعی آنها برقرار میشود. در نتیجه، میتوان تصمیمگیری در مورد ارزیابی امکانسنجی حریم هوایی شهری را در سیستم مختصات دوبعدی انجام داد.
در ابتدا، همانطور که در شکل ۴ نشان داده شده است ، چهار ربع به عنوان دسترسی بالا به حریم هوایی با خطر زمینی بالا (HH)، دسترسی بالا به حریم هوایی با خطر زمینی پایین (HL)، دسترسی کم به حریم هوایی با خطر زمینی پایین (LL) و دسترسی کم به حریم هوایی با خطر زمینی بالا (LH) تعریف شدهاند که به ترتیب در ربع ۱، ربع ۲، ربع ۳ و ربع ۴ قرار دارند. ربع ۱ با رنگ قرمز به معنای دسترسی بالا به حریم هوایی اما با خطر زمینی بیشتر است که در آن تأثیر عملیات پهپادها نسبتاً زیاد خواهد بود. ربع ۲ با رنگ زرد نشان دهنده حریم هوایی شهری با جمعیت کمتر اما مناطق محدودتر است. این مناطق عموماً مراکز خرید یا پایگاههای نظامی هستند که معمولاً به عنوان مناطق پرواز ممنوع برای پهپادها فهرست میشوند یا برای فعالیت به مجوزهای ویژه نیاز دارند. ربع ۳ با رنگ آبی نشان دهنده مناطق زیادی با خطر جمعیتی کم اما تعداد زیادی از مناطق محدود در حریم هوایی شهری است که برای فعالیت پهپادها کاملاً مناسب نیست. ربع چهارم با رنگ سبز، مناطقی با تراکم جمعیت کمتر اما فضای هوایی بازتر هستند که برای عملیات پهپاد مناسبترند.

نمودار تحلیل ربعی.
سپس دو آستانه برای دو شاخص فوق الذکر تعریف میشوند که عبارتند از آستانه خطر زمینی شهری و آستانه در دسترس بودن حریم هوایی شهری . مورد اول برای تعیین سطح خطری که عملیات پهپادها برای افراد زمینی ایجاد میکند، استفاده میشود. مورد دوم برای تعیین اینکه آیا حریم هوایی شهری برای عملیات پهپادها کافی است یا خیر، استفاده میشود. بر اساس این دو آستانه، معادله ( ۷ ) تعریف ریاضی از چهار ربع را ارائه میدهد. در این معادله، در دسترس بودن فعلی حریم هوایی شهری و C خطر فعلی زمینی شهری است.\alpha
به عنوان مثال، ربع دوم را در نظر بگیرید، این ربع متعلق به منطقهای با دسترسی بالا به حریم هوایی و ریسک زمینی پایین (HL) است، که در آن دسترسی به حریم هوایی بالاتر از آستانه و مقدار ریسک زمینی پایینتر از آستانه است. با تعیین آستانههای مختلف برای مناطق مختلف، میتوان دسترسی به حریم هوایی شهری و ریسک زمینی شهری را متعادل کرد، به این معنی که میتوان مناسبترین حریم هوایی را برای عملیات پهپاد تعیین کرد.
مدلسازی توپولوژی فضای هوایی شهری با مرتبسازی پارتو
پس از اینکه فضای هوایی شهری امکانپذیر که با استفاده از تحلیل ربعی ارزیابی میشود، به دست آمد، میتوان مدل توپولوژی فضای هوایی شهری را با روش مرتبسازی پارتو ۳۹ ساخت . مقداردهی اولیه مرتبسازی پارتو ابتدا با استفاده از یک مجموعه راهحل اولیه انجام میشود که هر کدام از آنها از یک فضای هوایی شهری با ارتفاع کم شبکهبندی شده تشکیل شدهاند. برای هر راهحل در این مجموعه، دو هدف بهینهسازی وجود دارد که عبارتند از در دسترس بودن فضای هوایی شهری و ریسک زمینی شهری. سپس باید یک رابطه تسلط تشکیل شود. به عنوان مثال، اگر هر دو شاخص شبکه فضای هوایی A بهتر از شبکه فضای هوایی B باشد، شبکه فضای هوایی A بر شبکه فضای هوایی B تسلط خواهد داشت .
به طور مشخص، یک متغیر تصمیم برای مقایسه اینکه آیا یک شبکه حریم هوایی با توجه به این دو شاخص بهتر از دیگری است، تعیین میشود. متغیر تصمیم به عنوان ترکیبی از موقعیت حریم هوایی شهری k و لایه h تعریف میشود که به صورت ( k , h ) نشان داده میشود. شاخصهای در دسترس بودن حریم هوایی شهری و ریسک زمینی شهری را میتوان به ترتیب با و R ( k , h ) نشان داد. پس از آن، مجموع وزنی برای انجام بهینهسازی برای به حداکثر رساندن در دسترس بودن حریم هوایی و به حداقل رساندن ریسک زمینی R ( k , h ) محاسبه میشود. از آنجا که این دو هدف از واحدهای مختلفی استفاده میکنند، قبل از ترکیب آنها با یکدیگر، باید نرمالسازی انجام شود.α(k, h)
تابع برازندگی این مسئله بهینهسازی در معادله ( ۸ ) داده شده است. در این معادله، مقدار برازندگی و ضریب وزنی است که مقدار آن بین ۰ و ۱ است تا بین در دسترس بودن حریم هوایی و ریسک زمینی R ( k , h ) تعادل برقرار کند. K مجموعهای از تمام مکانهای حریم هوایی شهری و H مجموعهای از تمام سطوح پرواز است.
در معادله، C ( k , h ) نشان دهنده ریسک زمینی شهری شبکه k ام در سطح پرواز h ام حداقل مقدار C ( k , h ) و = ۰٫۳ تنظیم شده است .C_{ts} C_{ts}
به طور مشابه نشان دهنده در دسترس بودن حریم هوایی شهری شبکه k ام در لایه h ام است . حداکثر مقدار و = ۰٫۲۵ تنظیم شده است .\alpha _{max}(k, h) \alpha (k, h) \alpha _{ts} \alpha _{ts}
طبق مدلهای فوق، به شبکههای حریم هوایی شهریِ امکانپذیر در هر سطح پرواز، مقادیر برازش اختصاص داده میشود که ایمنی و در دسترس بودن آنها را به طور همزمان اندازهگیری میکند. این مقادیر برازش متعاقباً در یک مرتبسازی اولیه برای ایجاد مرز پارتو استفاده میشوند. پس از آن، این مرز پارتو با مقایسه مقادیر برازش شبکههای مختلف حریم هوایی در یک سطح پرواز بهروزرسانی میشود تا زمانی که آن شبکههای حریم هوایی نتوانند تحت شرایط فعلی بیشتر بهینه شوند. همانطور که در شکل ۵ نشان داده شده است ، شبکههای حریم هوایی شهریِ امکانپذیر پس از مرتبسازی پارتو به طور جداگانه برای هر سطح پرواز ارائه میشوند و امکان تجسم واضحتری از امکانسنجی خاص لایه و تفاوتهای ساختاری را بدون تداخل همپوشانی چند لایه فراهم میکنند. در این مقاله، ۵۰٪ بالای شبکههای مرتبسازی پارتو به طور پیشفرض برای ساخت توپولوژی حریم هوایی شهری استفاده میشوند.

نتایج تولید توپولوژی فضای هوایی بر اساس مرتبسازی پارتو.
بهبود برنامهریزی مسیر پهپاد بدون سرنشین مافوق صوت PSO-ABC در توپولوژی حریم هوایی شهری
شرح مشکل
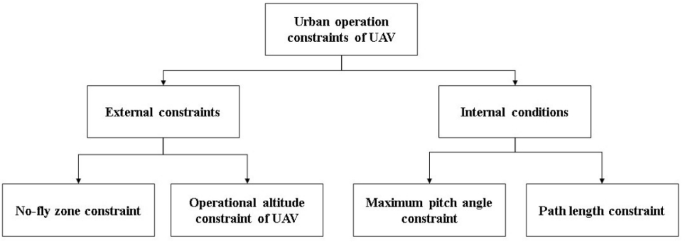
بر اساس توپولوژی حریم هوایی شهری ساخته شده، چگونگی ایجاد یک مسیر معقول برای عملیات پهپادها به دلیل تنوع و پیچیدگی حریم هوایی شهری، برای اطمینان از ایمنی و کارایی آن بسیار حیاتی میشود. بسیاری از محدودیتهای خارجی و همچنین محدودیتهای خود پهپادها باید در نظر گرفته شوند، که در شکل ۶ نشان داده شده است .
همانطور که در شکل ۶ نشان داده شده است ، محدودیتهای خارجی شامل محدودیتهای منطقه پرواز ممنوع و محدودیتهای ارتفاع عملیات پهپاد است. منطقه پرواز ممنوع به یک منطقه جغرافیایی یا حریم هوایی خاص اشاره دارد که برای عملیات پهپاد اکیداً ممنوع است. خطوط تراز دقیق، مکانها و ارتفاعات ساختمانهای شهری با استفاده از دادههای واقعی GIS استخراج میشوند. شبکههای حریم هوایی تحت پوشش ساختمانهای شهری به عنوان مناطق پرواز ممنوع در توپولوژی حریم هوایی تعیین میشوند. ارتفاع پرواز پهپادها باید از مقررات محلی پیروی کند و همزمان با محیط فیزیکی شهری سازگار شود. با توجه به ارتفاع و توزیع ساختمانهای شهری، پهپاد در محدوده ارتفاعی ۰ تا ۴۰ متر عمل میکند .
محدودیتهای داخلی بر عملکرد و الزامات ماموریت پهپاد تمرکز دارند، که عمدتاً شامل محدودیت حداکثر زاویه گام و محدودیت طول مسیر است. مورد اول، محدودیت زاویه بین محور طولی بدنه پهپاد و صفحه افقی است که نقش تعیینکنندهای در تعیین مرز عملکرد مانور پهپادها ایفا میکند. مورد دوم مستقیماً با پایداری و امکانپذیری ماموریت پهپادها مرتبط است. در این مقاله، مدل عملیات پهپاد در فضای هوایی شهری با اتصال غیرخطی هر دو محدودیت خارجی و داخلی به یکدیگر ساخته شده است که مبنای کمی مهمی برای ایجاد مدل برنامهریزی عملیات شهری پهپاد فراهم میکند.
توضیحاتی در مورد برنامهریزی مسیر پهپاد
مدلسازی سناریوهای عملیاتی پهپاد
منطقهای به مساحت ۵ کیلومتر مربع در منطقه ، شهر جینان، به عنوان سناریوی عملیاتی واقعی انتخاب شده است. از یک شبکه متقاطع برای گسستهسازی حریم هوایی شهری استفاده شده و یک رستر مربعی با طول ضلع ۱۰۰ متر به تعداد زیادی وکسل با اندازه یکسان ۱۰۰ متر در متر تقسیم میشود. بنابراین ، حریم هوایی کم ارتفاع شهری را میتوان با یک مجموعه گسسته نمایش داد و مختصات حریم هوایی رستری شده با شماره گرهها مطابقت دارد.\times \times
معادله ( ۱۱ ) یک تبدیل مختصات برای تحقق کدگذاری مختصات حریم هوایی ارائه میدهد. در این معادله، G مختصات شبکه حریم هوایی است. تعداد سطوح پرواز در محور Z است . حداکثر محور X و حداکثر محور Y است . مختصات محور Y و مختصات محور X است .محور X، محور Y، مختصات Y، مختصات X
بر اساس ارزیابی امکانسنجی حریم هوایی شهری، آستانه در دسترس بودن حریم هوایی شهری و آستانه خطر زمینی شهری به ترتیب ۰٫۲۵ و ۰٫۳ تعیین شدهاند. با استفاده از این آستانهها، تمام واحدهای حریم هوایی در منطقه مورد مطالعه بر اساس در دسترس بودن حریم هوایی و سطح خطر زمینی به چهار ربع طبقهبندی میشوند. توزیع آماری واحدهای حریم هوایی در چهار ربع در شکل ۷ نشان داده شده است .

توزیع واحدهای حریم هوایی شهری در ربعهای مختلف.
همانطور که در شکل ۷ نشان داده شده است ، واحدهای حریم هوایی که با در دسترس بودن حریم هوایی بالا و ریسک زمینی پایین (ربع LH) مشخص میشوند، ۶۳٫۶٪ از کل حریم هوایی شهری را تشکیل میدهند. از آنجایی که این ربع به طور همزمان الزامات امکانسنجی عملیاتی و ایمنی را برآورده میکند، برای عملیات پهپاد مناسب در نظر گرفته میشود. در نتیجه، تقریباً ۶۳٪ از حریم هوایی شهری برای عملیات پهپاد امکانسنجی در نظر گرفته میشود. علاوه بر این، طبق معادله ( ۸ )، معادله ( ۹ ) و معادله ( ۱۰ )، حریم هوایی امکانسنجی ارزیابی شده پهپاد با استفاده از مرتبسازی پارتو رتبهبندی میشود. مقادیر برازش در دسترس بودن حریم هوایی شهری و ریسک زمینی شهری برای ساخت مرز پارتو محاسبه میشوند و ۵۰٪ برتر به عنوان حریم هوایی بهینه موجود برای عملیات پهپاد تعریف میشود.
ساختمانهایی مانند زیرساختها و مناطق مسکونی هنگام فعالیت پهپادها در محیط شهری با ارتفاع کم، به عنوان موانع ایستا در نظر گرفته میشوند. یک مدل ساختمانی سهبعدی بر اساس دادههای واقعی GIS ساخته شده و موانع به مستطیلهایی سادهسازی شدهاند تا اجتناب از موانع تسهیل شود. همچنین مناطق پرواز ممنوع از این مدل ساختمانی سهبعدی استخراج میشوند که در آن عملیات پهپادها همیشه مجاز نیست. پس از آن، فضای هوایی عملیاتی بهینه و مدل ساختمانی سهبعدی تحت یک برهمنهی مکانی قرار میگیرند که وکسل حاوی ساختمانها را در آن حذف میکند. توپولوژی فضای هوایی شهری را میتوان ساخت و پهپادها فقط میتوانند در فضای هوایی موجود فعالیت کنند. محدودیتهای مربوط به عملیات پهپاد که در شکل ۶ ذکر شده است، در ادامه مدلسازی شدهاند.
اولین مورد، محدودیت منطقه پرواز ممنوع هنگام برنامهریزی مسیر پهپاد است. بر اساس توپولوژی حریم هوایی ساختهشده و دادههای واقعی GIS از مناطق شهری انتخابشده، ساختمانها به تعداد مستطیلهایی که در توپولوژی حریم هوایی شهری به عنوان مناطق پرواز ممنوع تعریف میشوند، تنظیم میشوند. پهپادها هنگام اجرای الگوریتم برنامهریزی مسیر، از ورود به این مناطق پرواز ممنوع منع میشوند. بر اساس محدودیتهای منطقه پرواز ممنوع، محدودیتهای طول مسیر برای تضمین حداقلسازی فاصله خطی مسیر و مصرف انرژی پهپاد لحاظ میشوند.
مورد دیگر، قید زاویه گام است که زاویهها را هنگام صعود یا نزول پهپادها نشان میدهد. با توجه به محدودیتهای عملکرد خود پهپادها، زاویه گام در طول پروازهای آنها نمیتواند از حداکثر مقدار تجاوز کند، که در این مقاله تنظیم شده است . معادله ( ۱۲ ) مدل قید زاویه گام پهپاد را ارائه میدهد. در این معادله، M تعداد نقاط مسیر در یک مسیر تولید شده است. زاویه بین قطعه مسیر n ام و\theta _P (n-1)
مورد سوم، قید فاصله ایمنی است. در معادله ( ۱۳ )، نشان دهنده آستانه ایمنی از پیش تعریف شده است که روی تنظیم شده و برای محدود کردن حداقل فاصله ایمنی که باید بین پهپاد در نقطه مسیر فعلی و زمین یا ساختمانهای اطراف رعایت شود، استفاده میشود. نشان دهنده ارتفاع زمین مربوط به محل نقطه مسیر است و نشان دهنده ارتفاع پرواز پهپاد در نقطه مسیر p ام در حین عملیات است. این قید برای جلوگیری از برخورد بین پهپاد و زمین یا ساختمانها در حین پرواز معرفی شده است.
عبارات محدودیت مختلف فوقالذکر را در یک تابع برازش مسیر واحد، همانطور که در معادله ( ۱۴ ) نشان داده شده است، ادغام کنید.
تابع هدف J از مجموع وزنی چندین عبارت هزینه و جریمه تشکیل شده است. هسته اصلی آن به حداقل رساندن طول مسیر و در عین حال جریمه کردن نقض محدودیتهای بحرانی پرواز است. در این تابع، قید منطقه پرواز ممنوع، قید طول مسیر، قید زاویه گام و قید فاصله ایمنی پرواز است که در آن ضرایب وزنی مربوطه آنها را نشان میدهد که برای متعادل کردن ایمنی پرواز استفاده میشود.
الگوریتمهای استاندارد PSO و ABC
الگوریتم استاندارد PSO
بهینهسازی ازدحام ذرات استاندارد (PSO) به نوعی الگوریتم مبتنی بر هوش گروهی تعلق دارد. PSO با شبیهسازی پدیده شکار تصادفی پرندگان یا ماهیها پیادهسازی میشود. PSO با مقداردهی اولیه مجموعهای از ذرات تصادفی، یعنی راهحلهای تصادفی، شروع میشود که هر کدام دارای دو پارامتر شامل موقعیت ذرات و سرعت ذرات هستند. فرض کنید اندازه یک ازدحام ذرات N باشد . موقعیت و سرعت تصادفی ذره x ام در فضای Y- بعدی به ترتیب عبارتند از و . تابع هزینه میتواند تعیین کند که آیا موقعیت فعلی یک ذره بهتر از موقعیت تاریخی آن است یا خیر. موقعیت بهینه pbest هر ذره در معادله ( ۱۵ ) نشان داده شده است.
بهترین موقعیت کلی برای همه ذرات در معادله ( ۱۶ ) نشان داده شده است. سرعت و موقعیت ذره x ام در -ام در معادله ( ۱۷ ) نشان داده شده است .
در معادله ( ۱۷ ). k تعداد تکرارها و وزن اینرسی است. و دو عامل شتاب هستند. آنها برای کنترل بازخورد اطلاعات فردی و تبادل اطلاعات گروهی ذره استفاده میشوند. این به یک ذره اجازه میدهد تا موقعیت خود را تنظیم کند و به تدریج به موقعیت بهینه نزدیک شود. و و دو عدد تصادفی از ۰ تا ۱ هستند که تحمل خطا و ظرفیت بهینهسازی ذرات را افزایش میدهند.
در اینجا، سرعت ذره x ام را در تکرار k ام نشان میدهد، همانطور که در معادله ( ۱۸ ) نشان داده شده است.
الگوریتم استاندارد ABC
کلونی زنبور مصنوعی (ABC) یک الگوریتم بهینهسازی هوشمند بیونیک کلونی ۴۰ است که رفتارهای یک کلونی زنبور عسل را برای یافتن منبع عسل با کیفیت بالا شبیهسازی میکند. این الگوریتم سه مرحله دارد که شامل مرحله مقداردهی اولیه، مرحله جمعآوری زنبور، مرحله زنبور پیرو و مرحله زنبور پیشاهنگ است.
برای مقداردهی اولیه یک الگوریتم ABC، چهار پارامتر مورد نیاز است که عبارتند از تعداد منابع عسل Ms ، تعداد زنبورهای جمعآوریکننده و زنبورهای بعدی Me ، حداکثر تعداد تکرارها و تعداد آستانه برای بهینه محلی. منبع عسل سراسری با معادله ( ۱۹ ) و i = {۱, ۲, …, Ms } تعریف میشود. در این معادله، نشان دهنده موقعیت اولیه منبع عسل i ام در بعد z ام است. z = {۱, ۲, …, Y } بُعد تابع است. و نشان دهنده حدود بالا و پایین بعد z ام هستند ، rand (0,1) یک عدد تصادفی با توزیع یکنواخت بین ۰ و ۱ تولید میکند که برای مقداردهی اولیه تصادفی موقعیت منبع عسل در محدوده بالا و پایین استفاده میشود.
در مرحله زنبور جمعآوریکننده، زنبورهای جمعآوریکننده مسئول یافتن منابع شهد جدید هستند و مطابق معادله ( ۲۰ ) عمل میکنند. } و . یک عدد تصادفی در است که تعیین میکند فرد فعلی چقدر تحت تأثیر افراد باقیمانده قرار میگیرد.
یک منبع شهد جدید طبق معادله ( ۲۰ ) تولید میشود و مقدار تناسب اندام محاسبه میشود. بر اساس یک معیار انتخاب حریصانه، بهترین منابع عسل جدید و قدیمی انتخاب میشوند و تابع تناسب اندام در معادله ( ۲۱ ) نشان داده شده است. مقدار تناسب اندام منبع عسل z ام است .
در مرحله زنبور پیرو، زنبور پیرو اطلاعات شهد به اشتراک گذاشته شده توسط زنبور جمعآوریکننده کندو را با احتمالی که با معادله ( ۲۲ ) محاسبه میشود، دریافت میکند. پس از آن، از یک روش رولت برای انتخاب منابع عسل برای جمعآوری استفاده میشود تا اطمینان حاصل شود که منابع عسل با حد آستانه بهینه محلی بالا ، احتمال بیشتری برای یافتن دارند. زنبورهای بعدی به دنبال بهترین منبع عسل میگردند. اگر منبع عسل تغییر کند، حد روی صفر تنظیم میشود. در غیر این صورت، حد یک واحد اضافه میشود.
اگر یک منبع شهد چندین بار بدون دریافت منبع شهد جدید استخراج شود، به این معنی است که هیچ راه حل بهتری وجود ندارد. حداکثر آستانه روی یک حد آستانه بهینه محلی تنظیم میشود . وقتی از آستانه تجاوز شود، منبع عسل رها شده و مرحله جستجوی زنبورها شروع میشود. با توجه به معادله ( ۱۹ )، زنبورهای جستجوگر به طور تصادفی یک منبع عسل جدید تولید میکنند و حد را روی صفر تنظیم میکنند.
برتری الگوریتمهای PSO و ABC در پیچیدگی کم و سازگاری بالای آنهاست. با این حال، هنگامی که پهپادها در فضای هوایی شهری فعالیت میکنند، نه تنها توزیع پیچیده موانع باید در نظر گرفته شود، بلکه باید محدودیتهای عملیاتی زیادی نیز در نظر گرفته شود. به این ترتیب، این دو الگوریتم به راحتی در بهینه محلی قرار میگیرند و همچنین سرعت جستجوی کند و تنوع جمعیت ناکافی هنگام تولید مسیر پرواز بهینه برای پهپادها وجود دارد.
الگوریتم بهبود یافته برنامهریزی مسیر پهپاد PSO-ABC
بر اساس تحلیل فوق، یک الگوریتم بهبود یافته برنامهریزی مسیر PSO-ABC برای عملیات پهپادها پیشنهاد شده است. طبق توپولوژی فضای هوایی شهری ساخته شده قبلی، تعداد زیادی وکسل برای تولید مسیرهای احتمالی پهپادها وجود دارد. دو مورد از آنها به عنوان نقطه شروع و نقطه مقصد برای پهپادها تعیین شدهاند. اولی در سطح پرواز اول با مختصات افقی و عمودی از (۰، ۰) تا (۵، ۵) قرار دارد. دومی در سطح پرواز نهم با مختصات افقی و عمودی از (۴۵، ۴۵) تا (۵۰، ۵۰) قرار دارد. فرآیند الگوریتم بهبود یافته PSO-ABC که در این مقاله ارائه شده است به شرح زیر است.
در ابتدا، با توجه به توپولوژی فضای هوایی شهری و عملکرد خود پهپاد، مقداردهی اولیه با اختصاص پارامترهایی شامل اندازه جمعیت، حداکثر تعداد تکرارها، سرعت ذرات، تعداد نقاط موقعیت، تعداد منابع شهد و آستانه سازگاری انجام میشود. در عین حال، با توجه به اندازه توپولوژی فضای هوایی شهری و پیچیدگی وظیفه پهپاد، اندازه جمعیت اولیه PSO باید به اندازهای بزرگ باشد که تمام وکسلهای ممکن فضای هوایی را بتوان پوشش داد. سپس حداکثر تکرارهای PSO و همچنین سرعت ذرات برای جلوگیری از مسیرهای نامعتبر تنظیم میشود. پس از آن با مقداردهی اولیه تعداد منابع شهد، میتوان یک رابطه بهینهسازی مشارکتی بین الگوریتمهای PSO و ABC تشکیل داد، به این معنی که یک ذره در بهینهسازی محلی با یک منبع شهد مطابقت دارد. مقداردهی اولیه یک آستانه سازگاری برای ایجاد تعادل بین ایمنی و کارایی این الگوریتم استفاده میشود.
در مرحله بعد، مقدار برازندگی هر ذره محاسبه میشود که به وسیله آن رکورد راهحل بهینه فردی و راهحل بهینه سراسری به صورت پویا بهروزرسانی میشوند. همزمان، یک مخزن نگهداری برای نگهداری راهحلهای بهینه ایجاد میشود. سرعت و موقعیت هر ذره در PSO بهروزرسانی میشود تا راهحل بهینه فردی و راهحل بهینه سراسری تولید شوند . وزنهای اینرسی PSO برای تنظیم شدت کاوش برای قفل کردن سریع مناطق راهحل بهینه بالقوه معرفی میشوند.
الگوریتم ABC سوم برای بهینهسازی محلی همسایگی راهحلهای بهینه انتخابشده توسط PSO گنجانده شده است. زنبورهای جمعآوریکننده برای انجام یک اسکن دقیق جهت جمعآوری راهحلهای با کیفیت بالا که ممکن است توسط PSO از دست بروند، استفاده میشوند. پس از آن، زنبورهای دنبالکننده روی منابع مخزن کار میکنند تا مناطق منبع شهد بهینه بالقوه را از طریق توزیع احتمال مقادیر تناسب اندام بهینهسازی کنند. زنبورهای پیشاهنگ مسئول بررسی مجدد منابع شهد دور ریختهشده برای افزایش تنوع جستجو هستند. با وارد کردن راهحلهای بهینه الگوریتم ABC به جمعیت PSO در جهت معکوس، مجموعه راهحلهای بهینه کلی بهروزرسانی میشود. PSO راهحلهای جدید تولید شده توسط ABC را بیشتر بهینه میکند و بردار سرعت ذرات برای هدایت ABC به جستجو در جهتهای محلی برای جلوگیری از افتادن در برخی مناطق باریک انتهایی استفاده میشود. الگوریتم پیشنهادی PSO-ABC تمایل بهینهسازی را با توجه به ویژگیهای توپولوژی فضای هوایی شهری برای اجتناب از موانع دقیق در لایه ارتفاع پایین و همچنین برای اطمینان از یافتن راهحلهای بهینه تنظیم میکند.
در نهایت، مسیر خام تولید شده توسط الگوریتمهای اکتشافی مانند PSO-ABC شامل مجموعهای از نقاط مسیر گسسته است که توسط بخشهای خط مستقیم به هم متصل شدهاند. اجرای چنین مسیر چندخطی برای پهپاد از نظر سینماتیکی غیرممکن است، زیرا نیاز به تغییرات آنی در جهت دارد. برای حل این مشکل، یک مرحله پسپردازش برای هموار کردن مسیر بهینه نهایی اعمال میشود. به طور خاص، از یک منحنی B-Spline مکعبی برای برازش توالی نقاط مسیر گسسته استفاده میشود. نقاط مسیر مسیر اصلی به عنوان نقاط کنترل برای B-Spline عمل میکنند که به نوبه خود یک مسیر هموار با پیوستگی C² ایجاد میکند. این تضمین میکند که انحنای مسیر حاصل به طور مداوم تغییر میکند و به پهپاد اجازه میدهد مسیر را با پروفیلهای سرعت و شتاب هموار دنبال کند. شرایط همگرایی مورد قضاوت قرار میگیرند. در صورت برآورده شدن، میتوان مسیر بهینه نهایی پهپاد را به دست آورد. در غیر این صورت، محاسبه ادامه مییابد. نمودار جریان دقیق الگوریتم بهبود یافته PSO-ABC که در این مقاله ارائه شده است، در شکل ۸ ارائه شده است .
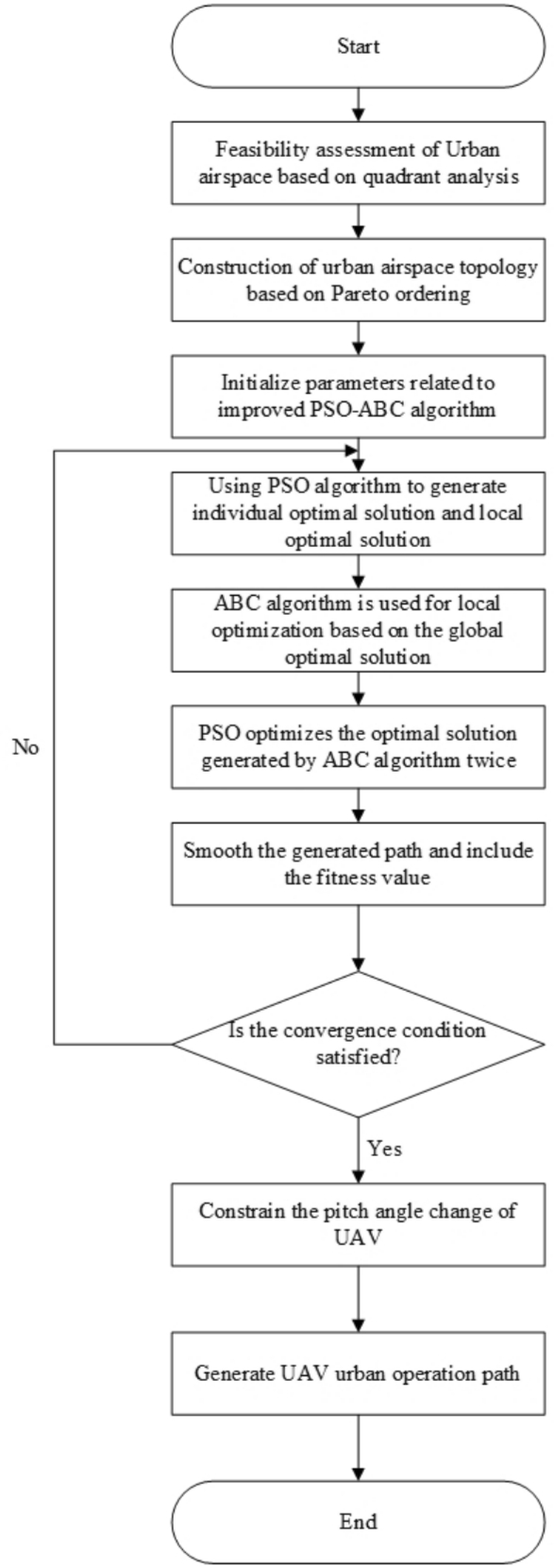
فلوچارت الگوریتم بهبود یافته PSO-ABC پیشنهادی.
شبیهسازی تجربی و تحلیل نتایج
به منظور بررسی اثربخشی الگوریتم بهبود یافته PSO-ABC پیشنهادی در این مقاله، از MATLAB 2021b به عنوان پلتفرم شبیهسازی با ویندوز ۱۰، پردازنده Intel Core i7 و حافظه ۱۶ گیگابایتی استفاده شده است. مدل پهپاد مورد استفاده در شبیهسازیها DJI M600 PRO است.
تنظیمات سناریو و پارامتر
یک منطقه شهری واقعی در ناحیه چانگکینگ، شهر جینان، چین، به عنوان مورد مطالعه انتخاب شد. منطقه مورد مطالعه انتخاب شده را پوشش میدهد و به شبکههای زمینی با طول ضلع ۱۰۰ متر گسستهسازی شد. حداکثر ارتفاع حریم هوایی شهری ۴۰ متر تعیین و به نه سطح پرواز با فاصله ۵ متر تقسیم شد. بر اساس این گسستهسازی سهبعدی و مجموعه دادههای ساختمان GIS شهری (شامل ردپاهای ساختمان و ارتفاعهای مربوطه)، ساختمانها به سلولهای اشغالشده (فضای غیرقابل ناوبری) نقشهبرداری شدند و سلولهای باقیمانده به عنوان فضای آزاد ممکن در نظر گرفته شدند و بدین ترتیب یک مدل حریم هوایی مبتنی بر شبکه سهبعدی برای عملیات پهپاد ساخته شد.
شکل ۹ توزیع ارتفاع ساختمان را در منطقه انتخاب شده نشان میدهد، که در آن بلندترین ساختمان به ۳۷٫۴۷ متر و میانگین ارتفاع ۱۴٫۱۴ متر میرسد. منطقه مورد مطالعه در منطقه شهری مرکزی چانگکینگ، جینان، استان شاندونگ چین واقع شده است و ناهمگونی عمودی قابل توجهی را نشان میدهد. این منطقه پرجمعیت است و شامل زیرساختهای مهم، ساختمانهای مسکونی و تأسیسات تجاری میشود. قسمت بالا سمت چپ مربوط به یک منطقه تجاری اصلی با کارخانههای صنعتی، ساختمانهای تجاری و تأسیسات ترافیک جادهای است که منجر به ساختمانهای عموماً بلندتر میشود، در حالی که قسمت پایین سمت راست یک منطقه مسکونی نسبتاً یکنواخت و متراکم است که شامل بلندترین ساختمانها میباشد. به طور کلی، ارتفاع ساختمانها در سراسر منطقه انتخاب شده به طور قابل توجهی متفاوت است. در این مقاله، ارتفاع و موقعیت مکانی ساختمانها از طریق مدلسازی دقیق مجموعه دادههای ساختمان تعیین شده است.

توزیع واحدهای حریم هوایی شهری در ربعهای مختلف.
پارامترهای مورد نیاز در جدول ۱ آورده شده است . N اندازه گروه PSO است که روی ۵۰ تنظیم شده و حداکثر تعداد تکرارها روی ۱۰۰ تنظیم شده است. حداکثر وزن اینرسی روی ۱٫۲ تنظیم شده و سپس حداقل مقدار آن ۰٫۵ است. ضرایب شتاب و هر دو روی ۲ تنظیم شدهاند. تعداد منابع شهد Ms در ABC روی ۵۰ تنظیم شده است. تعداد زنبورهای جمعآوریکننده و زنبورهای دنبالکننده Me هر دو روی ۲۵ تنظیم شدهاند. حداکثر تعداد تکرار روی ۱۰۰ تنظیم شده و حد آستانه بهینه محلی روی ۲۰ تنظیم شده است. در این مقاله، حداکثر زاویه گام پهپاد تنظیم شده است .
تحلیل نتایج شبیهسازی
به منظور تأیید عملکرد الگوریتم بهبود یافته برنامهریزی مسیر PSO-ABC که برای عملیات پهپاد در این مقاله ارائه شده است، مسیرهای تولید شده در توپولوژی فضای هوایی ساخته شده با مسیرهای الگوریتمهای استاندارد GA، PSO و ABC تحت سناریوهای مشابه با استفاده از همان پهپاد مقایسه میشوند. نتایج در شکل ۱۰ نشان داده شده است .

مسیرهای پهپاد تولید شده توسط الگوریتمهای مختلف.
برای ارزیابی جامع عملکرد برنامهریزی مسیر الگوریتم در توپولوژی شهری سهبعدی، آزمایشهای شبیهسازی در این بخش شامل سناریوهایی است که در آنها مبدأ و مقصد در لایههای مختلف پرواز توزیع شدهاند، همانطور که در شکل ۱۰ (ad) نشان داده شده است. علاوه بر این، با استفاده از روش پیشنهادی در توپولوژی حریم هوایی، میتوان از همه موانع و مناطق پرجمعیت اجتناب کرد. اما مسیر پهپاد تولید شده توسط GA به اندازه کافی هموار نیست و نوسانات زیادی دارد. بخشهای مسیر زیادی وجود دارند که از سطوح پرواز با چرخشهای تند عبور میکنند و وارد مناطق پرواز ممنوع در حریم هوایی میشوند که به طور قابل توجهی بر کارایی عملیات و ایمنی پهپادها تأثیر میگذارد. در همین حال، مسیرهای پهپاد تولید شده توسط PSO و ABC از برخی مناطق پرواز ممنوع عبور میکنند که همچنین خطر بالقوهای را برای عملیات پهپاد و همچنین مصرف انرژی زیادی ایجاد میکند. الگوریتم بهبود یافته PSO-ABC که در این مقاله ارائه شده است، قادر به تولید مسیرهای عملیاتی پهپاد پیوسته و هموار است که توپولوژی حریم هوایی گسسته شهری را به طور مؤثر متصل میکند و از همه مناطق پرواز ممنوع هنگام عملیات آنها اجتناب میکند. این الگوریتم میتواند الزامات مورد نیاز برنامهریزی عملیات شهری پهپاد را برآورده کند.
به منظور مقایسه بیشتر عملکرد چهار الگوریتم، مقادیر برازش مسیرهای پهپاد تولید شده توسط PSO، GA، ABC و الگوریتمهای بهبود یافته PSO-ABC در شکل ۱۱ آورده شده است . همانطور که در این شکل نشان داده شده است، سرعت همگرایی روش پیشنهادی با کمترین مقدار برازش از اولین تکرار تا انتها، سریعترین است. جستجوی مسیر با کیفیت بالا میتواند در ۳۱ تکرار انجام شود. اما برای PSO، ۸۵ تکرار برای تکمیل یک فرآیند جستجوی کامل مورد نیاز است که کارایی آن بسیار پایین است. به ترتیب ۶۷ و ۶۱ تکرار در الگوریتمهای GA و ABC برای یافتن راهحلهای بهینه وجود دارد. این بدان معناست که هم کارایی و هم دقت روش پیشنهادی در این مقاله بهبود یافته است. به طور خاص، زمان همگرایی در مقایسه با PSO 64٪ کوتاهتر شده است. تعداد تکرارها در مقایسه با GA و ABC به ترتیب ۵۴٪ و ۴۹٪ کاهش یافته است.

مقادیر تناسب مسیرهای پهپاد تولید شده توسط الگوریتمهای مختلف.
از تجزیه و تحلیل میتوان نتیجه گرفت که این الگوریتم بهبود یافته PSO-ABC که در این مقاله ارائه شده است، میتواند برنامهریزی مسیر را که برای عملیات پهپادها با بالاترین کارایی و دقت مناسب است، تحقق بخشد. در عین حال، میتواند افزونگی را تا حد زیادی کاهش دهد و برتری جامعی را در فضای هوایی پیچیده شهری نشان دهد.
نتیجهگیری
در این مقاله، یک الگوریتم برنامهریزی PSO-ABC بهبود یافته برای عملیات پهپادها با یک توپولوژی حریم هوایی شهری با ساختار دقیق ارائه شده است. ابتدا دو شاخص برای ارزیابی یک حریم هوایی شهری مشخص، که عبارتند از در دسترس بودن حریم هوایی شهری و ریسک زمینی شهری، در نظر گرفته میشوند. سپس امکانسنجی حریم هوایی با استفاده از یک تحلیل ربعی و مرتبسازی پارتو برای تولید یک توپولوژی حریم هوایی با دادههای GIS شهری واقعی ارزیابی میشود. پس از آن، یک استراتژی جستجوی سراسری و محلی با ترکیب دو نوع الگوریتم اکتشافی، که PSO برای جستجوی سراسری و ABC برای جستجوی محلی هستند، پیشنهاد میشود. سپس بر اساس سطوح ایمنی مناطق زمینی، محدودیتهای عملکرد پهپادها و مناطق پرواز ممنوع، یک الگوریتم برنامهریزی PSO-ABC بهبود یافته در یک توپولوژی حریم هوایی شهری ساخته شده پیشنهاد میشود. یک منطقه شهری در منطقه چانگکینگ، شهر جینان به عنوان سناریوی عملیات پهپاد برای انجام شبیهسازیها در نظر گرفته شده است. نتایج تجربی نشان میدهد که عملکرد الگوریتم پیشنهادی با همواری مسیر بالا و سرعت همگرایی سریع، بهترین است. پایداری و استحکام هر دو تضمین شده است.
در دسترس بودن دادهها
تمام دادههای تولید شده یا تحلیل شده در طول این مطالعه در این مقاله گنجانده شده است.
منابع
-
لی، ک. و لی، دبلیو. تصحیح هندسی ارتوفتو مادون قرمز حرارتی با استفاده از ارتوفتو RGB برای وسیله نقلیه هوایی بدون سرنشین. Aerospace ۱۱ ، ۸۱۷ (۲۰۲۴).
-
ما، ز.، هه، س.، دوان، ز. و لیو، ج. تحلیل اثرات غیرمستقیم رعد و برق بر گیرندههای ناوبری وسایل نقلیه هوایی بدون سرنشین. هوافضا ۱۱ ، ۸۱۰ (۲۰۲۴).
-
برترام، جی. و وی، پی. یک الگوریتم کارآمد برای رسیدن به ترمینال خودسازمانده در حمل و نقل هوایی شهری. در انجمن AIAA Scitech 2020 ، ۰۶۶۰ (۲۰۲۰).
-
کوون، جی.، کیم، وای. و چوی، اس.-اچ. طراحی نقشه حریم هوایی برای پیادهسازی خدمات مشتریپسند در وسایل نقلیه هوایی بدون سرنشین. Spat. Inf. Res. ۲۷ ، ۸۷–۹۵ (۲۰۱۹).
-
جانگ، دی.-اس.، ایپولیتو، سی. ای.، سانکارارامان، اس. و استپانیان، وی. مفاهیم ساختارهای حریم هوایی و تحلیل سیستم برای جریانهای ترافیک هوایی برای مناطق شهری. در AIAA Information Systems-AIAA Infotech@ Aerospace ، ۰۴۴۹ (۲۰۱۷).
-
اسپیرکوفسکا، ل.، کولکارنی، س. س.، واتکینز، ج. و مارتین، ل. تراکم دینامیکی حریم هوایی حمل و نقل هوایی شهری. در انجمن هوانوردی AIAA 2022 ، ۳۴۰۳ (۲۰۲۲).
-
لی، یو.-جی.، آن، اس.-جی.، چوی، دی.-وای.، چین، اس.-ام. و جانگ، دی.-اس. طرحها و عملیات حریم هوایی برای مدیریت ترافیک هواپیماهای بدون سرنشین در ارتفاع پایین. هوافضا ۱۰ ، ۷۳۷ (۲۰۲۳).
-
سونیل، ای. و همکاران. تأثیر ساختار ترافیک بر ظرفیت حریم هوایی. در ICRAT 2016، هفتمین کنفرانس بینالمللی تحقیقات در حمل و نقل هوایی (۲۰۱۶).
-
شرستا، ر.، باجراچاریا، ر. و کیم، س. ۶g مدیریت ترافیک وسایل نقلیه هوایی بدون سرنشین را فعال کرد: یک دیدگاه. IEEE Access ۹ ، ۹۱۱۱۹–۹۱۱۳۶ (۲۰۲۱).
-
تانگ، اچ. طراحی فضای هوایی و رفع تعارض استراتژیک برای حمل و نقل هوایی شهری . پایاننامه دکتری، دانشگاه فلوریدای جنوبی (۲۰۲۲).
-
تانگ، جی.، عالم، اس.، لوکان، سی. و عباس، اچ.ای. یک رویکرد چندهدفه برای بخشبندی پویای حریم هوایی با استفاده از مدلهای مبتنی بر عامل و هندسی. Transp. Res. C: Emerg. Technol. ۲۱ ، ۸۹–۱۲۱ (۲۰۱۲).
-
وانگ، CSY، سوندارام، S. و سونداراراجان، N. Cdas: یک معماری تصمیمگیری شناختی برای بخشبندی پویای حریم هوایی برای عملیات کارآمد. IEEE Trans. Intell. Transp. Syst. ۲۰ ، ۱۶۵۹–۱۶۶۸ (۲۰۱۸).
-
یحیی، اچ اس و محمد، ای اس. بهینهسازی برنامهریزی مسیر در وسایل نقلیه هوایی بدون سرنشین با استفاده از الگوریتمهای فراابتکاری: یک بررسی سیستماتیک. Environ. Monit. Assess. ۱۹۵ ، ۳۰ (۲۰۲۳).
-
سیفی-شیشوان، س. ا.، فرخیزاده، ا. و کوتلو گوندوغدو، ف. یک مدل ریاضی جدید برای طراحی مسیر پهپاد برای عملیات جستجو و نجات در بلایای طبیعی. در تکنیکهای هوشمند و فازی در هوانوردی ۴.۰: نظریه و کاربردها ، ۵۲۱–۵۴۲ (اسپرینگر، ۲۰۲۱).
-
سان، جی.، تانگ، جی. و لائو، اس. اجتناب از برخورد برای پهپادهای مشارکتی با الگوریتم میدان پتانسیل مصنوعی بهینه شده. IEEE Access ۵ ، ۱۸۳۸۲–۱۸۳۹۰ (۲۰۱۷).
-
ژوراوسکا، آی.، کولاکووسکا، آی. و موسینکو، ام. توسعه روشی برای تعیین مساحت عملیات تشکیل وسایل نقلیه بدون سرنشین با استفاده از نظریه گراف. East.-Eur. J. Enterp. Technol. ۲ (۳)، ۴–۱۲ (۲۰۱۸).
-
ژانگ، سی.، ژن، زی.، وانگ، دی. و لی، ام. روش برنامهریزی مسیر پهپاد مبتنی بر بهینهسازی کلونی مورچهها. در کنفرانس کنترل و تصمیمگیری چین در سال ۲۰۱۰ ، ۳۷۹۰–۳۷۹۲ (IEEE، ۲۰۱۰).
-
پهلواناوغلو، وای. وی و پهلواناوغلو، پی. یک الگوریتم ژنتیک بهبود یافته برای برنامهریزی مسیر پهپاد خودران در مسائل پوشش هدف. Appl. Soft Comput. J. ۱۱۲ ، ۱۰۷۷۹۶ (۲۰۲۱).
-
یوان، جی. و همکاران. بهینهسازی سراسری برنامهریزی مسیر پوشش ناحیهای پهپاد بر اساس مجموعه نقاط خوب و الگوریتم ژنتیک. مجله هوافضا ، شماره ۹ ، صص ۸۶ (۲۰۲۲).
-
ال گمیلی، ن.، مجاهد، م.، الکاری، ا. و آیاد، ح. پارامترهای بهینه مشتق-تناسبی مبتنی بر رویکرد جستجوی فاخته بهبود یافته برای کنترل پرواز کوادکوپتر. مجله مهندسی برق، مجله مهندسی برق، شماره ۱۹ ، صفحات ۲۱۹-۲۳۲ (۲۰۲۲).
-
رائو، جی. و همکاران. برنامهریزی مسیر برای حمل و نقل تعلیق مشارکتی دو پهپاد بر اساس الگوریتم میدان پتانسیل مصنوعی-a*. سیستم مبتنی بر دانش. ۲۷۷ ، ۱۱۰۷۹۷ (۲۰۲۳).
-
مادریدانو، Á.، Al-Kaff، A.، Martín، D. & de la Escalera، A. روش برنامه ریزی مسیر سه بعدی برای ازدحام uavs در شرایط اضطراری ساختمان. Sensors ۲۰ , ۶۴۲ (۲۰۲۰).
-
لو، کیو.، وانگ، اچ.، ژنگ، وای. و هی، جی. تحقیق در مورد برنامهریزی مسیر ربات متحرک مبتنی بر الگوریتم بهبود یافته کلونی مورچهها. محاسبات عصبی. Appl. ۳۲ ، ۱۵۵۵–۱۵۶۶ (۲۰۲۰).
-
بائو، س.، لو، ی.، لی، ک. و شو، پ. تحقیقی در مورد برنامهریزی مسیر پهپاد بر اساس الگوریتم کلونی مورچهها با ضریب زاویه. مجله فیزیک: شماره کنفرانس ۱۶۲۷ ، شماره ۰۱۲۰۰۸ (انتشارات IOP، ۲۰۲۰).
-
یون، س.، جونگ، اس.یو، کوون، اس.جی، لی، س. و نا، اچ.اس. یک طرح استراتژیک برای ارائه خدمات مدیریتی برای فضاهای سبز شهری در طول موج گرما با استفاده از یک سیستم مشترک کامیون و ربات. Expert Syst. Appl. ۲۹۴ ، ۱۲۸۵۷۲ (۲۰۲۵).
-
ژن، ایکس.، انزه، زد. و چینگوی، سی. برنامهریزی مسیر وسایل نقلیه هوایی بدون سرنشین دوار در زمین ناهموار بر اساس بهینهسازی ازدحام ذرات چند هدفه. مجله مهندسی سیستمها. الکترون. ۳۱ ، ۱۳۰–۱۴۱ (۲۰۲۰).
-
ساریم، م. و همکاران. شناسایی و اجتناب توزیعشده برای چندین وسیله نقلیه هوایی بدون سرنشین در حریم هوایی ملی. مجله دین. سیستم. اندازهگیری. کنترل ۱۴۱ ، ۰۷۱۰۱۴ (۲۰۱۹).
-
فن، ایکس.، گوئو، وای.، لیو، اچ.، وی، بی. و لیو، دبلیو. روش میدان پتانسیل مصنوعی بهبود یافته برای برنامهریزی مسیر ربات خودران خودکار. ریاضی. مسائل. مهندسی. ۲۰۲۰ ، ۶۵۲۳۱۵۸ (۲۰۲۰).
-
یون، وای.، نا، اچ اس و کوون، اس جی. استراتژیهای مسیریابی بهینه برای تحویل در آخرین مایل با ناوگانی متشکل از یک کامیون و چندین ربات ناهمگن. Transp. Res. Rec. ۲۶۷۹ , ۵۰۶–۵۳۴ (۲۰۲۵).
-
ژانگ، ی.، لی، س. و گوئو، ه. نوعی شبکه عصبی توزیعشده مبتنی بر اجماع بایاس برای برنامهریزی مسیر. Nonlinear Dyn. ۸۹ ، ۱۸۰۳–۱۸۱۵ (۲۰۱۷).
-
چانگ، ی.، وانگ، ی.، السعدی، FE و زونگ، جی. کنترل تطبیقی ردیابی فیدبک خروجی فازی برای سیستمهای غیرخطی فیدبک خالص تصادفی سوئیچشده. مجله بینالمللی Adapt. Control Signal Process. ۳۳ ، ۱۵۶۷–۱۵۸۲ (۲۰۱۹).
-
گائو، ایکس.، فانگ، وای. و وو، وای. الگوریتم یادگیری فازی q برای برنامهریزی مسیر دو هواپیما به منظور شناسایی مشترک اهداف توسط رادارهای غیرفعال. مجله مهندسی سیستمها. الکترون. ۲۴ ، ۸۰۰-۸۱۰ (۲۰۱۳).
-
گرانچارووا، آ.، گروتلی، ای. آی.، هو، دی.-تی. و یوهانسن، تی. ای. برنامهریزی مسیر پهپادها با استفاده از mpc توزیعشده تحت محدودیتهای تلفات مسیر ارتباطات رادیویی. مجله هوش. ربات. سیستم. ۷۹ ، ۱۱۵–۱۳۴ (۲۰۱۵).
-
وو، جی. و همکاران. بهینهسازی مسیر توزیعشده برای ردیابی هدف پهپادهای خورشیدی چندگانه در محیط شهری با استفاده از الگوریتم بهینهسازی تطبیقی ملخ. Aerosp. Sci. Technol. ۷۰ ، ۴۹۷–۵۱۰ (۲۰۱۷).
-
شیشلاک، دی.، ولف، پی. و پچوچک، ام. اجتناب از برخورد هواپیما با همکاری غیرمتمرکز مبتنی بر عامل. IEEE Trans. Intell. Transp. Syst. ۱۲ ، ۳۶–۴۶ (۲۰۱۰).
-
کیم، جی.، کوون، دی. و کوون، اس.جی. سیستمهای توزیع آب اضطراری برای بهبود برابری فضایی و عدالت مکانی در یک جامعه ناهمگن با ویژگیهای حرکتی متفاوت. مجله بینالمللی کاهش خطر بلایا. ۱۱۲ ، ۱۰۴۷۳۰ (۲۰۲۴).
-
ژانگ، دبلیو. و همکاران. ارزیابی مبتنی بر دو معیار و تولید توپولوژی فضای هوایی شهری با استفاده از تحلیل کوادرانت و رتبهبندی پارتو. مجله هوافضا ، شماره ۱۱ ، ۹۷۸ (۲۰۲۴).
-
قصری، م. و مغربی، م. عوامل مؤثر بر ایمنی وسایل نقلیه هوایی بدون سرنشین: تجزیه و تحلیل اکتشافی دادههای پس از وقوع از حوادث و سوانح هواپیماهای بدون سرنشین در استرالیا. مجله علمی Saf. ۱۳۹ ، ۱۰۵۲۷۳ (۲۰۲۱).
-
اوه، اس. و یون، وای. عملیات پهپادهای شهری: ارزیابی جامع و دادهمحور از حریم هوایی شهری با رویکردی مبتنی بر پارتو. Transp. Res. A: Policy Pract. ۱۸۲ ، ۱۰۴۰۳۴ (۲۰۲۴).
-
کارابوگا، دی. ایدهای مبتنی بر ازدحام زنبورهای عسل برای بهینهسازی عددی. گزارش فنی TR06، دانشگاه ارجیس، قیصریه، ترکیه (۲۰۰۵).