یک روش سریع و دقیق هدف گیری فضایی برای مدل سازی و نقشه برداری صحنه سه بعدی در واقعیت افزوده موبایل
برداشت هدف فضایی با کارایی بالا یک عملکرد ضروری در مدلسازی و نقشهبرداری صحنه سه بعدی است که به طور گسترده در واقعیت افزوده موبایل (MAR) استفاده میشود. برداشت دادههای مکانی در یک سیستم MAR باید سریع و دقیق باشد، در حالی که تعامل انسان-رایانه در زمان واقعی و نرمی ترسیم نیز باید تضمین شود. در این مقاله، مزایا و معایب چندین الگوریتم snapping دادههای مکانی، مانند روش هندسه محاسباتی دوبعدی و روش محاسبه فاصله مطلق را تحلیل میکنیم. برای پرداختن به مسائلی که الگوریتمهای موجود بهاندازه کافی از برداشت دادههای سهبعدی و عکسبرداری در زمان واقعی حجم دادههای بالا پشتیبانی نمیکنند، ما یک الگوریتم snapping پویا تطبیقی جدید را بر اساس ویژگیهای فضایی و گرافیکی دادههای واقعیت افزوده (AR) ارائه میکنیم. سرانجام، این الگوریتم توسط یک سیستم مدلسازی واقعیت افزوده آزمایش میشود، از جمله ارزیابی کارایی snapping و دقت snapping. از طریق مقایسه تجربی، متوجه شدیم که الگوریتم پیشنهادی در این مقاله به طور قابل توجهی از نظر کوتاه کردن زمان چفت شدن، افزایش پایداری snapping، و بهبود دقت snapping نقاط برداری، خطوط، چهرهها، بدنهها و غیره بهبود یافته است. الگوریتم پیشنهادی در این مقاله به طور متوسط ۱٫۶ برابر بیشتر از الگوریتم سنتی است، در حالی که دقت اکتساب داده بر اساس الگوریتم در این مقاله به طور متوسط بیش از ۶ برابر بیشتر از الگوریتم سنتی در شرایط مشابه است. ، و دقت داده های آن از سطح دسی متر به سطح سانتی متر بهبود یافته است. از جمله ارزیابی راندمان چفت شدن و دقت چفت شدن. از طریق مقایسه تجربی، متوجه شدیم که الگوریتم پیشنهادی در این مقاله به طور قابل توجهی از نظر کوتاه کردن زمان چفت شدن، افزایش پایداری snapping، و بهبود دقت snapping نقاط برداری، خطوط، چهرهها، بدنهها و غیره بهبود یافته است. الگوریتم پیشنهادی در این مقاله به طور متوسط ۱٫۶ برابر بیشتر از الگوریتم سنتی است، در حالی که دقت اکتساب داده بر اساس الگوریتم در این مقاله به طور متوسط بیش از ۶ برابر بیشتر از الگوریتم سنتی در شرایط مشابه است. ، و دقت داده های آن از سطح دسی متر به سطح سانتی متر بهبود یافته است. از جمله ارزیابی راندمان چفت شدن و دقت چفت شدن. از طریق مقایسه تجربی، متوجه شدیم که الگوریتم پیشنهادی در این مقاله به طور قابل توجهی از نظر کوتاه کردن زمان چفت شدن، افزایش پایداری snapping، و بهبود دقت snapping نقاط برداری، خطوط، چهرهها، بدنهها و غیره بهبود یافته است. الگوریتم پیشنهادی در این مقاله به طور متوسط ۱٫۶ برابر بیشتر از الگوریتم سنتی است، در حالی که دقت اکتساب داده بر اساس الگوریتم در این مقاله به طور متوسط بیش از ۶ برابر بیشتر از الگوریتم سنتی در شرایط مشابه است. ، و دقت داده های آن از سطح دسی متر به سطح سانتی متر بهبود یافته است.
کلید واژه ها:
محاسبات فضایی ; تجزیه تطبیقی ; چفت شدن ; MAR ; پردازنده گرافیکی ؛ الگوریتم بلادرنگ ؛ تعامل AR ؛ تعامل مبتنی بر بینش
۱٫ مقدمه
هدف واقعیت افزوده (AR) اتصال محتوای دنیای واقعی و مجازی است و در عین حال به کاربران امکان می دهد در زمان واقعی با هم تعامل داشته باشند. دیدگاه جدیدی از دنیای جدید زمانی شکل می گیرد که کاربر علاوه بر دنیای واقعی، اطلاعات تکمیلی (مثلاً تصاویر، صداها و متن) را دریافت کند [ ۱ ]. روند فعلی در فناوری AR سادهتر کردن تعامل کاربران نهایی و حرفهای با آن و همچنین باز کردن حوزههای کاربردی جدید است [ ۲ ]. با تعامل بین کاربران و محیطهای اطرافشان، AR میتواند تجربیات تجسمی و نقشهبرداری جدیدی در GIScience و حوزههای مرتبط تولید کند [ ۳ ، ۴ ، ۵ ].
در دهههای اخیر، فعالیتهای تحقیقاتی برای توسعه سیستمهای واقعیت افزوده و/یا ارائه مدلسازی صحنه سهبعدی تقویتشده بر روی یک دستگاه تلفن همراه، با اکثریت آنها در زمینههای تورهای مجازی [ ۶ ، ۷ ] و زمینی ، افزایش یافته است. نظرسنجی مبتنی بر [ ۸ ، ۹ ] و مدل سازی اطلاعات ساختمان (BIM) [ ۱۰ ، ۱۱ ]، که ممکن است به عنوان یک سیستم واقعیت افزوده موبایل (MAR) در نظر گرفته شود [ ۱۲ ]]. سیستم های MAR چه روی سر و چه به صورت دستی، به عنوان نوع جدیدی از فناوری تجسم داده ها به سرعت پیشرفت کرده اند. برای شروع، این دستگاه های تلفن همراه، به ویژه گوشی های هوشمند و تبلت ها، بسیار محبوب و قابل حمل هستند. علاوه بر این، عملکرد آنها از برخی رایانههای شخصی پیشی گرفته است، با قابلیت کافی برای پردازش دادهها و انجام وظایف اولیه.
MAR با تکنیک ها و تجهیزات پیشرفته با دستگاه های تلفن همراه، از جمله سنسورهای حرکت و سنسور GPS، و همچنین یک سیستم دوربین قدرتمند، اطلاعات موقعیت جغرافیایی را از طریق یک سیستم AR فراهم می کند و نیاز به اجزای جداگانه تجهیزات و سنسورهای استاندارد را بی نیاز می کند. به عنوان مثال، لپ تاپ، دوربین، GPS). MAR برای حل چالشهایی مانند همکاری و هماهنگی محدود و همچنین شناخت متنی ناکافی تغییر دارد [ ۱۳ ]] برای فعالیت های بررسی زمینی. به جای صرف جهت گیری یا ارائه نوع خاصی از اطلاعات مرجع، می تواند داده های مرتبط قبل از رویداد را ارائه دهد، مانند مکان قبلی موجودیت ها یا هندسه منطبق بر بقایای موجودیت و جزئیات در مورد عوامل محیطی که به طور قابل توجهی بر وضعیت پاسخ دهنده تأثیر می گذارد. به تجسم یا بررسی در محل [ ۱۴ ]، و دانش در مورد سایر تیم های نظرسنجی در منطقه، یا تلاش های ارزیابی قبلی [ ۸ ].
MAR همچنین با تجزیه معنایی چشم انداز محیط [ ۱۵ ] و پیوند دادن ویژگی های ارزشمند اضافی برای مدیران تأسیسات [ ۱۶ ]، از جمله مکان یابی اجزای ساخت و تجسم سه بعدی (۳ بعدی) اطلاعات نامرئی، یک رویکرد راحت و ساده برای بازیابی اطلاعات ارائه می دهد. ۱۷ ]. رویکرد مبتنی بر MAR برای تجسم طراحی معماری به جای تمرکز بر تصاویر استاتیک یا مدلهای مقیاس سه بعدی، بر تجربیات همهجانبه و تعاملی برای تکامل طراحی مقرونبهصرفه و ارتباط کارآمد بین کسبوکارها و مصرفکنندگان تمرکز دارد [ ۱۸ ]]. با کمک اطلاعات مدل، اتصالات پیچیده با اجزای مختلف را می توان با مونتاژ عناصر معماری به وضوح بازیابی کرد. به عنوان یک شرکت معماری، SOA (Simon Oswald Architecture، https://soa-inc.com ، دسترسی به ۳۰ دسامبر ۲۰۲۱) (کلمبیا، MO، ایالات متحده آمریکا) می تواند بهتر از داده های پروژه برای تصمیم گیری بهتر و ارائه خدمات BIM استفاده و تجزیه و تحلیل کند. با ترکیب اطلاعات از مقیاس جامعه (GIS، سازههای اطراف، و غیره) تا اجزای خاص سازنده، آنها میتوانند به طور دقیق روابط مکانی و مادی را از طریق خروجی دادههای کمی، تجزیه و تحلیل عملکرد ساختمان و نقشههای فازبندی پیچیده که مورد نیاز هر پروژه است، تجزیه و تحلیل و بهینه کنند. [ ۱۹]. یک جزء جدید از مدل نزدیک به یک قطعه موجود اضافه می شود. کاربران چنین سیستم هایی اغلب اشیا را با دست جابه جا می کنند و در موقعیت مناسب قرار می دهند [ ۲۰ ].
در یک سیستم مدلسازی صحنه سهبعدی تعاملی، قرار دادن و جهتدهی دقیق اشیا پایه و اساس نقشهبرداری روابط فضایی بین اجزای صحنه است. این شامل طیف وسیعی از عملیات، از جمله انتخاب نقاط کنترل، منحنی ها، و سطوح، و همچنین ترجمه، چرخش، و مقیاس بندی اجزای صحنه در روابط دقیق با اجزای دیگر است. اگرچه مدلسازی سهبعدی دقیق بسیار پیچیده است و به مهارت حرکتی بالایی، کشیدن یا مقیاسگذاری زیاد با ماوس و تعداد زیادی دستورالعمل ورودی صفحهکلید نیاز دارد، اما میتوان آن را به سرعت، دقیق و بصری با snapping سه بعدی که به کاربران در تراز کردن اشیا کمک میکند، به دست آورد. Snapping موقعیت های هم تراز را با مغناطیس [ ۲۱ ]، گرانش [ ۲۲ ] و تبدیل های تعاملی فراهم می کند.۲۳ ]. یک snapping موثر با استفاده از بازخورد بلادرنگ و انجام محاسبات خاص به صورت خودکار، مانند محاسبه تراز اشیاء و تقاطع آنها، رابط کاربری را بهینه می کند.
هنگام دستکاری اشیا در صحنه AR، یک محدودیت مجازی (قاعده روابط فضایی که اشیا باید رعایت کنند) باید برای حفظ سازگاری تغییرات [ ۲۴ ] با روابط بین عناصر هندسی اشیاء واقعی و مجازی انجام شود. هنگامی که کاربر شی را در نزدیکی محدودیت حرکت می دهد، شی به طور خودکار دقیقاً با محدودیت مجازی مطابق با قوانین محدودیت خاصی که شامل خطوط گسترش، خطوط افقی، خطوط عمودی، نقاط روی چهره، نقاط روی خطوط، مماس سطح، نقاط پایانی، نقاط میانی است، تراز می شود. ، تقاطع ها و سایر محاسبات ریاضی برای تراز بر اساس رابطه هندسی فضای سه بعدی.
با این حال، قرار دادن یک شی دقیقاً در فضای AR آسان نیست زیرا درک عمق یک شی در فضای ۳ بعدی تقویت شده دشوار است. حتی اگر عمق یک جسم را بتوان توسط حسگر [ ۲۵ ] درک کرد، باز هم به دلیل پایداری ردیابی، حرکات کوچک دست و غیره، قرار دادن آن جسم دقیقاً در یک مکان خاص دشوار است [ ۲۶ ]. علاوه بر این، محدودیتهای MAR در دقت سنسور [ ۲۷ ]، استحکام و کارایی راهحلهای ردیابی و خطاهای عملیاتی ناشی از ادراک بصری انسان در محدودههای دور وجود دارد. این امر قرار دادن دقیق اجسام در MAR در فواصل طولانی را چالش برانگیزتر می کند.
علاوه بر این، عملکرد محاسبات برای یک سیستم مبتنی بر MAR حیاتی است. اگرچه برخی از برنامه های کاربردی تلفن همراه دارای ظاهر و قابلیت هایی شبیه به دسکتاپ هستند، منابع فیزیکی دستگاه های تلفن همراه همچنان محدود است (به عنوان مثال، ظرفیت باتری و اندازه صفحه نمایش محدود)، که توسعه الگوریتم های پیچیده را دشوار می کند [ ۲۸ ]. برای اینکه باتری دستگاه های تلفن همراه دوام بیشتری داشته باشد، عکس گرفتن در صحنه AR باید برای حفظ روانی رندر بسیار کارآمد باشد. به دلیل برخی از محاسبات برای ساخت صحنه تعاملی دقیق از جمله گرانش و تقاطع، با این وجود، snapping از نظر محاسباتی نیازمند است [ ۲۲ ]. هنگامی که اندازه یا پیچیدگی شی بزرگ یا پیچیده باشد، عملکرد سیستم snapping کاهش می یابد [ ۲۹ ]]. با این حال، برای حفظ سازگاری اشیاء مجازی با دنیای واقعی، به بازخورد و به روز رسانی صفحه در زمان واقعی نیاز دارد. برای هر رویکرد snapping در AR، باید بین عملکرد و شهود، یک معاوضه وجود داشته باشد. از آنجایی که در واقعیت افزوده، تعامل انسان و رایانه بلادرنگ است، الگوریتم باید در عین اطمینان از صحت بدون تداخل با رندر صحنه، سریع باشد.
علاوه بر این، سیستمهای snapping سه بعدی موجود به دلیل قابلیتهای محاسباتی دستگاهها و روشهای مدلسازی روابط فضایی، عمدتاً به یک منطقه کوچک محدود میشوند. در نتیجه، هنگامی که آنها برای مدلسازی صحنههای پیچیده در دنیای واقعی به کار میروند، پس پردازش سنگین روی خروجیهای آن روشها مورد نیاز است. در این مطالعه، محدودیتهای معنایی مدلسازی صحنه سهبعدی، بهویژه برای مدلسازی فضای داخلی توسعه مییابد. این دستگاه قادر است اشیاء نامنظم مانند دیوارها در هر جهت، درها روی دیوار، پنجره ها روی دیوار، قسمت های زیرین ساختمان در هر جهت و ساختمان های استوانه ای را به درستی ثبت کند. علاوه بر این، این تحقیق همچنین محدودیتهای مجازی را بر روی صحنههای سهبعدی واقعی، مانند مناطق نامرئی خارج از میدان دید کاربر و تصویربرداری از فواصل طولانی در داخل ساختمانهای بزرگ، پیادهسازی کرد.
این مطالعه همچنین به مشکل محاسبه محدودیت گرفتن اشیاء سه بعدی در یک سیستم بلادرنگ می پردازد. یک راه حل سریع برای چسباندن اجسام متحرک به اشیاء موجود در یک محیط AR در این مقاله پیشنهاد شده است. بدون در نظر گرفتن این که این هندسه ها مقیاس، چرخش، جابجا شده یا تغییر اندازه شده باشند، به خوبی کار می کند. طبق دانش ما، روش ما اولین روشی است که تصویربرداری سه بعدی را در صحنه AR با محیطی پیچیده و در مقیاس بزرگتر نشان می دهد. سهم اصلی این مقاله به شرح زیر است:
یک مدل محدودیت جدید که شامل مدل سازی کل یک صحنه سه بعدی است در این مقاله پیشنهاد شده است. سطوح زیرین ساختمان، ارتفاعات عمودی، درها، پنجرهها، ضخامت ساختمان و ساختمانهای نامنظم را میتوان در MAR ثبت کرد که هزینههای مدلسازی سه بعدی پس از پردازش را کاهش میدهد.
محدودیت های مسافت طولانی و مناطق نامرئی در میدان دید کاربر در این مطالعه ارائه شده است. محدودیتها شامل محدودیتهای خطوط امتداد طولانیمدت خط موازی و خط عمودی در داخل یا خارج از میدان دید، نقطه فاصله طولانی در خط سطح، ارتفاع بلند مدت و صفحه دلخواه خارج از میدان دید است.
برای دستیابی به پرس و جو و محاسبه در زمان واقعی با کارایی بالا، یک استراتژی نمایه سازی شبکه ای سازگار و پویا [ ۳۰ ] نیز توسعه داده شده است. با استفاده از روش شاخص، یک مدل محدودیت مجازی با هندسه محاسباتی سه بعدی ایجاد میشود و رابطه همترازی بین تصویر دوبعدی رابط لمسی و ویدیوی سهبعدی محیط AR واقعی برقرار میشود.
تجزیه و تحلیل دقیق ملاحظات مهم طراحی برای تکنیکهای گیرکردن و هم ترازی هدف فضایی، از جمله میدان دید محدود کاربر، محاسبه بیدرنگ استخراج محدودیت هدف فضایی توسط دوربینهای متحرک، مشکلات تغییر دید در AR، مشکلات صحنه پویا در این مقاله انجام شده است. و تجسم محدودیت های فیزیکی.
بقیه مقاله به شرح زیر سازماندهی شده است: بخش ۲ رابطه بین کار ما و تکنیک های موجود در AR snapping را مورد بحث قرار می دهد. بخش ۳ به ارائه قوانین محدودیت برای snapping بلادرنگ AR و معماری روش پیشنهادی اختصاص دارد و همچنین ویژگی های کلیدی و نمونه اولیه نظری را برای Snapping بلادرنگ AR در مقیاس بزرگ توضیح می دهد. بخش ۴ اثربخشی و عملکرد روش را از طریق یک سری آزمایش های کمی و کیفی بررسی می کند و سپس نتایج را ارزیابی و بحث می کند. بخش ۵ تحقیق و توصیه هایی را برای کارهای آینده به پایان می رساند.
۲٫ کارهای مرتبط
حجم قابل توجهی از ادبیات در مورد snapping سه بعدی منتشر شده است. اولین مطالعه دقیق از snapping در فضای سه بعدی توسط Bier و همکاران گزارش شد. [ ۲۳ ]. روش Snap-dragging در مطالعه آنها پیشنهاد شد، که دقیقاً از قرار دادن مکاننمای سه بعدی [ ۳۱ ]، گرفتن نقاط، منحنیها و سطوح با نزدیکتر شدن مکاننما به هندسه موجود پشتیبانی میکند. علاوه بر این، روش آنها اتصال بین اشیا را امکانپذیر میکند، که مدلسازی سهبعدی را دقیقتر میکند، اما از لحاظ محاسباتی گرانقیمتی را نیز به همراه دارد [ ۲۲ ].
برای کاهش میزان محاسبات، مطالعات متعددی تلاش کردهاند تا پیچیدگی مدلسازی را از جنبههای مختلف کاهش دهند. یک راه حل این است که اشیاء مجازی را می توان به عنوان یک راهنما در یک محیط مدل سازی تعاملی مورد استفاده قرار داد. تکنیکهای تعامل سهبعدی مبتنی بر راهنما توسط Oh و همکاران توسعه داده شد. [ ۳۲ ]. روش ارائه شده میتواند کارایی عملیات مدلسازی از جمله طرح، اکسترود، مجسمهسازی و دستکاری را در سیستمهای طراحی سهبعدی بهبود بخشد. با این حال، این تحقیق سناریوهای پیچیده ساختمانی در دنیای واقعی را در نظر نگرفت. از آنجایی که ناحیه مدلسازی کوچک است، مسائلی مانند حرکت جسم نیز نادیده گرفته میشوند.
گزینه دیگر تعریف اشیاء مجازی ساده برای ساده کردن روابط هندسی است. دو و همکاران [ ۲۹ ] یک الگوریتم snapping سریع ارائه کرد که “نقاط داغ” را برای هر عنصر، که یک کره با یک شعاع خاص است، تعریف می کند. هنگامی که مرکز اجسام متحرک در کانون هر هندسه موجود قرار می گیرد، الگوریتم به آن شکل می چسبد. این مطالعه گزارش داد که این الگوریتم می تواند دقیق تر باشد و اشیاء سه بعدی را در زمان واقعی ضبط کند و از ارائه صحیح صحنه با تعداد کمی از نمونه های آزمایشی اطمینان حاصل کند. از آنجا که این روش در درجه اول به نقاط داغ برای پردازش وابسته است، می تواند با انواع هندسه سازگار شود. با این حال، این مطالعه تنها نقاط داغ را در نقطه مرکزی جسم کوچک تعریف میکند و کارایی هندسههای بزرگتر و پیچیدهتر را کاهش میدهد.
چندین تلاش برای دستیابی به کارایی و دقت انجام شده است. انجام تعامل دقیق در دستگاه های تلفن همراه به دلیل حرکت ناپایدار نمای دوربین و دقت کمتر رابط دشوار است. برای مقابله با این موضوع، لی و همکاران. [ ۳۳ ] یک رویکرد Snap-to-Feature برای محاسبه زمان واقعی دقیق و توابع بهینه برای ردیابی در سیستم AR پیشنهاد کرد. متأسفانه دامنه این تحقیق نسبتاً محدود بود و عمدتاً به دستکاری تصاویر دو بعدی مربوط می شد. یکی دیگر از راه حل های ممکن، توسعه اندازه گیری دقیق اشیاء مبتنی بر دید و snapping برای مدل سازی تعاملی سه بعدی است. یک رویکرد snapping مبتنی بر گوشه توسط Swaminathan و همکاران پیشنهاد شده است. [ ۳۴]. این اتصالات جعبه را به طور کامل مدل می کند و تحمل خطای قوی تری برای قرار دادن نشانگر دارد. علاوه بر این، با اندازه گیری دقیق تر، راندمان کاهش نمی یابد. با این حال، فاقد یک نقشه برداری متقاعد کننده از حرکات روی سطح دو بعدی بر روی دستکاری اشیا در فضای سه بعدی است. همچنین طیف وسیعی از عملکردهای حسگر را در دستگاه های MAR انجام نمی دهد.
مسئله قبلی کمبود ورودی های دو بعدی در فضای سه بعدی تا حدی توسط کوان و همکاران مورد توجه قرار گرفته است. [ ۳۵ ]، که کارش استفاده از فناوری های snapping را برای اجرای طراحی اسکچ سه بعدی در MAR ارائه کرد. این روش جفت ورودی چندوجهی ورودی دو بعدی و ورودی سه بعدی را ادغام می کند و ایجاد مدل های سه بعدی در محل را ساده می کند. با این حال، این راه حل در پردازش سیگنال حسگر نیز نقص دارد. به شدت تحت تأثیر نویز سیگنال ردیابی است. در نتیجه، سیستم به قابلیت اطمینان ردیابی حرکت ARKit حساس است، که گاهی اوقات ناپایدار و وابسته به سناریو است.
از سوی دیگر، اسنپ در سه بعدی پیچیده تر است زیرا به دست آوردن اطلاعات عمق در فضای سه بعدی تقویت شده دشوار است. بنابراین، تلاش کاملاً طبیعی برای بررسی الگوریتمهای snapping بر اساس تصاویر RGB-D که اطلاعات عمق بیشتری را ارائه میدهند [ ۳۶ ، ۳۷ ] است. یک روش کارآمد مبتنی بر تصاویر RGB-D برای جابجایی اشیاء مجازی به صحنه های واقعی در زمان واقعی توسط لی و همکاران ارائه شده است. [ ۲۷ ]. با این حال، این سیستم تنها از ساختار مسطح صحنههای زیرین بهره میبرد. علاوه بر این، و مهمتر از آن، دقت کم داده های عمق، در نظر گرفتن روابط پیچیده تر و عکس برداری از مسافت های طولانی را دشوار می کند.
نورنبرگر و همکاران [ ۳۸ ] تکنیکی را برای برداشت خودکار اشیاء مجازی با محدودیتهای فیزیکی که در زمان واقعی از محیط واقعی ایجاد میشوند، بررسی کرد. این رویکرد قادر است برخی از اطلاعات سه بعدی را از داخل ساختمان ها استخراج کند، مانند لبه های سه بعدی و محدودیت های مسطح. با این محدودیت در گرفتن استخراج پویا، کارایی تراز کردن اشیا با دنیای واقعی به طور قابل توجهی بهبود می یابد. این تحقیق همچنین بر روی ثبت نویز در دنیای واقعی و تجسم محدودیت متمرکز شد و بیانگر مدلسازی سه بعدی در صحنه AR را افزایش داد. با این حال، الگوریتمهای آنها هنوز به درک معنایی پیچیدگیهای صحنه فیزیکی نرسیدهاند و اصولاً به روابط هندسی ساده محدود میشوند.
از بحث فوق، تحقیقات منتشر شده بسیار کمی در مورد کارایی و دقت تراز و موقعیت اشیاء فضایی دیجیتال در یک صحنه ۳ بعدی تقویت شده بزرگ یا پیچیده وجود دارد. مطالعات موجود در مورد تکنیک های snapping سه بعدی بر روی snapping دقیق در یک منطقه کوچک به جای یک محیط بزرگ یا پیچیده متمرکز شده است. اکثر مطالعات قبلی نمیتوانند اطلاعات ساخت واقعی را در محدوده کامل ثبت کنند، که چالشی است که در فضای سهبعدی فعلی برطرف نشده است.
علاوه بر این، روشهای برداشت دادههای مکانی قبلی به طور کامل سازگاری با snapping در مقیاس بزرگ در محیط واقعی را در نظر نمیگرفتند، و آنها محاسبات زمان واقعی را تحت مقدار زیاد داده تضمین نمیکردند. به عنوان مثال، جزئیات محاسبات محدودیت از محیط واقعی و محیط مجازی در میدان دید کاربران در فضای داخلی ساختمانی بزرگتر از ۱۰۰ متر مربع، شامل محدوده snapping و فرکانس به روز رسانی داده های snapping. فهرست مطالب.
۳٫ روش تحقیق
۳٫۱٫ اصول محدودیت MAR Snapping
پیش نیازهای اساسی برای الگوریتم های snapping کارآمد و قوی در MAR در سه جنبه خلاصه می شود. باید بتواند دقت جمع آوری داده ها را بهبود بخشد، زمان مطالعه سیستم را کاهش دهد و دشواری کارکرد سیستم AR را در مناطق با دسترسی دشوار یا حتی دورافتاده کاهش دهد [ ۳۴ ]. استانداردهای دقیق برای سناریوهای برنامه snapping AR مانند عملکرد، دقت و تعامل با محیط های بیرونی باید رعایت شود. در این مقاله، این اصول به طور خاص مورد توجه قرار گرفته است.
۳٫۱٫۱٫ ضربه زدن با دقت بالا
چفت شدن دقیق اجسام برای تغییر از ورودی دستی به عملیات دست آزاد با دقت بیشتر حیاتی است. از آنجایی که عملیات دست آزاد مستعد ایجاد خطا و نتایج نادرست است، یک سیستم ردیابی دستی با دقت بالا مورد نیاز است.
برای دستگاههای رایانههای پوشیدنی، ورودی متن میتواند از طریق صفحهکلید نصبشده روی ساعد، ورودی دست مبتنی بر اشاره، یا تشخیص گفتار [ ۲۶ ] باشد. اگرچه صفحه کلیدهای ساعد نسبت به کیبوردهای مجازی ارجحیت بیشتری دارند، اما نیاز به استفاده از هر دو دست دارند. روشهای دیگر، مانند تشخیص اشاره و تشخیص گفتار، نسبت به سیستمهای مبتنی بر قلم، نرخ خطای بالاتری دارند [ ۳۹ ].
هنگامی که یک شی به یک شبکه تراز محور محور متصل می شود، نویز ردیاب و خطاهای ناشی از دستکاری دست آزاد را می توان حذف کرد. snapping مبتنی بر مش یک ویژگی مشترک اکثر سیستم های مدل سازی CAD مبتنی بر دسکتاپ دو بعدی است [ ۴۰ ]. با این حال، دقت این عملیات توسط اندازه سلول مش تعیین می شود. این می تواند به مسئله تنظیم دقیق وضوح تصویر منجر شود.
فرآیند تراز با استفاده از رئوس، لبه ها و چند ضلعی ها به اشیاء مجازی اجازه می دهد تا به جای اتصال رئوس به مش، با یکدیگر یا با سایر اشیاء فیزیکی تراز شوند. بهعلاوه، این فرآیند توانایی اتصال سریع به محدودیتهای مجازی اضافی را بر اساس اشیاء مجازی تراز شده فراهم میکند. این تراز مستلزم ثبت مناسب اشیاء مجازی با محیط های واقعی است. بسته به وظیفه، شی مجازی را می توان با توجه به محیط فیزیکی و سیستم مختصات صفحه دوربین ثبت کرد، یا می توان آن را به سرعت از طریق روابط نسبی به جسم فیزیکی متصل کرد.
۳٫۱٫۲٫ ضربه زدن با سرعت بالا
از آنجایی که AR یک سیستم نرم افزاری بلادرنگ است، برای دستیابی به یک نقشه برداری دقیق از دنیای مجازی و واقعی، باید از پردازش با سرعت بالا اطمینان حاصل کرد. برای اطمینان از اینکه نتایج عکسبرداری با رجوع به دنیای واقعی با تصویر لحظهای دوربین مطابقت دارد و با فرکانس تازهسازی بیش از ۲۵ فریم در ثانیه یا بالاتر، باید روی صفحه رندر شده دوربین بهصورت بلادرنگ انجام شود. با محدودیت های مجازی
تغییر مکرر حالتهای snapping برای فرآیندهای تعامل انسان و رایانه و رابطهای لمسی بسیار نامطلوب است، بهویژه در یک زمینه مشترک با دنیای واقعی. برای جلوگیری از تغییر حالتهای غیرضروری، عملیات snapping نه تنها باید سریع اجرا شود، بلکه باید تمام دادههای محدودیت مجازی را در نمای AR نیز بگیرد (کل ناحیه ارائهشده به سطح هدف در مدل دوربین در MAR، به عنوان مثال، صفحه برش جلو [ ۴۱ ]). و خروجی ایده آلی را ارائه دهید که محدودیت روی صفحه دوربین را برآورده می کند. این رویکرد روابط بین نمایش صفحه با اشیاء مربوطه را حفظ می کند. علاوه بر این، شی را می توان در نزدیکی محدودیت های مجازی یا اشیاء دیگر بدون تداخل قرار داد.
۳٫۱٫۳٫ برداشتن از راه دور
به خوبی شناخته شده است که عملیات از راه دور تحت تأثیر نویز ردیاب قرار می گیرد [ ۴۲ ]. با وجود راهحلهای متعددی که برای سیستمهای واقعیت مجازی داخلی توسعه داده شدهاند، بیشتر مطالعات به روابط با دامنههای مجازی محدود میشوند [ ۴۳ ]. مقیاسبندی برای AR قابل اعمال نیست زیرا اطلاعات AR قبلاً در دنیای فیزیکی ثبت شده است. پیوند یک به یک بین دنیای مجازی و دنیای فیزیکی توسط جهان های مقیاس بندی شده قطع خواهد شد. در حالی که اطلاعات مجازی به مقیاس مجازی کوچک می شود، افراد را نمی توان تا مقیاس فیزیکی بزرگ کرد و در نتیجه نمایش تصویری نادرست است.
علاوه بر غیرقابل اجرا بودن مناظر مقیاسشده، لازم است از اتصال دقیق و سریع برای گوشههای دور از دسترس داخلی، لبههای میز و صندلی، قسمتهای روی هم، سطح بیرونی نردههای فضای باز و سمت دوردست پشتیبانی شود. رودخانه، گودال ها، و مناطق آتش سوزی. این برای یکپارچگی کار snapping و عملکرد سیستم snapping بسیار مهم است.
به دلیل کیفیت پایین حسگرهای ردیابی شش درجه آزادی، سیستمهای واقعیت افزوده در فضای باز چالشهای ذاتی با عملکرد دوربرد دارند. ردیابی داخلی ممکن است به دقت ردیابی در سطح میلی متری دست یابد. با این حال، ردیابی بیرونی برای دقت به شدت به GPS یا سیستمهای سنجش هدایت اینرسی مبتنی بر بینایی وابسته است. بهترین دقت تقریباً ۱ سانتی متر است. اگرچه خود سنسورهای جهت یابی کاملاً دقیق هستند، اما حرکت بدن هنگام راه رفتن می تواند تأثیر منفی بر دقت داشته باشد. ردیابی نسبی دستهای کاربر در سیستمهای AR پوشیدنی در فضای باز هنوز یک چالش تحقیقاتی برجسته است. بنابراین، ردیابی حرکات کاربر و پیشبینی محدودیتهای مجازی یک تکنیک حیاتی برای بسیاری از راهحلهای AR و VR راه دور است.
۳٫۲٫ معماری سیستم ARSnap
در این بخش، ما یک کتابخانه الگوریتمهای AR Snapping (ARSnap) را ارائه میکنیم که یک روش سریع و دقیق برای snapping AR برای اهداف فضایی سه بعدی و همچنین معماری و الگوریتم عملکردی هسته کتابخانه است. ARSnap متشکل از انواع استراتژیهای محاسباتی مبتنی بر CGAL [ ۴۴ ]، از جمله همترازی فضایی سهبعدی و استراتژیهای مثلثسازی، با هدف دستیابی به snapping پویا با کارایی بالا برای محیطهای خواندنی در مقیاس بزرگ است. اصول اساسی و گردش کار در مقیاس بزرگ AR در زمان واقعی نیز در این مقاله پیشنهاد شده است.
برای پردازش اطلاعات ورودی خاص از دستگاههای MAR [ ۴۵ ]، عملکرد سیستم ARSnap، بر خلاف روشهای سنتی، عمدتاً از مدلسازی محدودیت مجازی AR در فضای سهبعدی واقعی، مدل شبکه تطبیقی از همترازی هدف فضایی با کارایی بالا تشکیل شده است. و ادراک بلادرنگ حالت هدف فضایی با دوربین های متحرک تغییر می کند. بهعلاوه، میتواند مدل خروجیهای snapping در MAR را بر اساس ترکیب اشیاء واقعی و دیجیتال ارائه کند، و همچنین از snapping و همترازی دادههای فضایی چند منبعی پشتیبانی میکند.
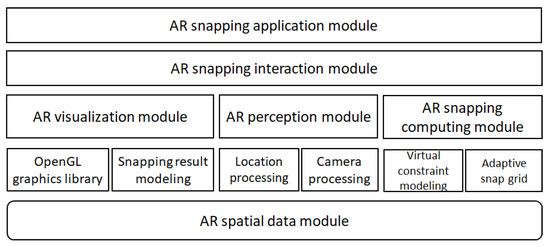
اجزای معماری سیستم ARSnap شامل ماژول موتور داده های مکانی، ماژول تجسم AR، ماژول درک AR، ماژول محاسباتی AR snapping، ماژول تعامل AR snapping و ماژول برنامه کاربردی AR snapping است. معماری سیستم در شکل ۱ نشان داده شده است .
روش مدلسازی و نقشهبرداری صحنه سهبعدی ارائهشده در این مقاله عمدتاً از عکسبرداری AR، تجسم AR و درک محیط AR تشکیل شده است. هر ماژول شامل چندین زیر ماژول برای ایجاد مدل ها و خروجی ها می باشد. کل فرآیند مدلسازی سه بعدی در شکل ۲ نشان داده شده است. سخت ترین محاسبات در این مراحل، محاسبه دقیق snapping اشیاء فضایی بر اساس محدودیت های مجازی سه بعدی است. یکی از بزرگترین چالشها این است که رابطه فضایی و عکسبرداری از دستههای مختلف عکسبرداری باید برای نمای AR و صحنه واقعی در زمان واقعی در نظر گرفته شود. یکی دیگر از مؤلفههای کلیدی استخراج مدلسازی تعاملی بر اساس معناشناسی مدلسازی سه بعدی داخلی است. به دلیل دادههای عناصر متنوع، مانند زمین، دیوار، خطوط منظم، خطوط نامنظم، ارتفاع، پنجرهها و دروازهها، این مرحله بیشترین زمان را در فرآیند مدلسازی میبرد. دستورالعمل ها و اطلاعات تعاملی در پاسخ به اقدامات کاربر و حرکت دوربین ارائه می شود تا تغییر مکان عناصر فضایی مجازی را آغاز کند. به عنوان مثال، اقدامات کاربران، مانند لرزش نزدیک، دور و کناری، با لمس بازخورد داده می شود. پیامهای موفق و سایر اطلاعات راهنمایی برای بهبود تجربه عکسبرداری. علاوه بر این، هدف از شاخصهای شبکه octree تطبیقی برای snapping، افزایش کارایی پشتیبانی از بهروزرسانی پویا منطقه جستجوی snapping است.
۳٫۳٫ مدل سازی محدودیت های مجازی سه بعدی ARSnap
در یک سیستم AR مبتنی بر محدودیت مجازی سه بعدی، روابط هندسی به صورت معادلات ریاضی نشان داده میشوند. بنابراین، مشکل یافتن پیکربندی که مجموعه ای از محدودیت ها را برآورده می کند، می تواند با حل یک سیستم معادلات به دست آید. به طور مشابه، تعیین قیود چندگانه نیاز به حل چندین سیستم معادلات دارد [ ۴۰ ]]. با توجه به موارد فوق، این مقاله روش زیر را پیشنهاد میکند: قبل از شروع عملیات snapping، صفحه محیط واقعی باید شناسایی شود. سپس بر اساس این صفحه، معادله ماتریس صفحه منطقه بی نهایت و همچنین قوانین محدودیت مجازی در معادله ماتریس صفحه ساخته می شود. در نهایت عملیات snapping طبق قوانین محاسباتی مشخص شده در هر نوع انجام می شود تا به جمع آوری دقیق داده ها دست یابیم. این مقاله از یک الگوریتم فیلتر میانه توسعه یافته برای استخراج صفحه بهینه [ ۴۶ ] از چندین صفحه شناسایی شده در محیط واقعی استفاده می کند.
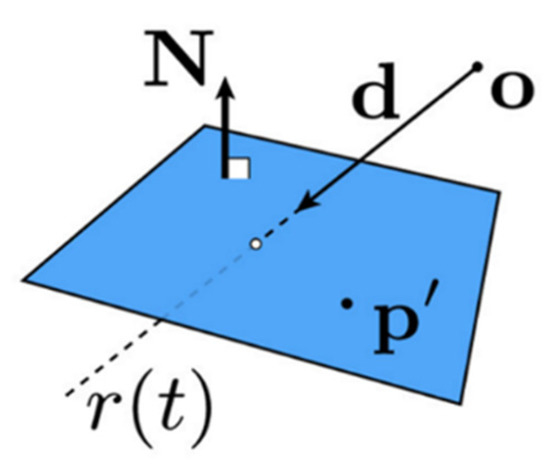
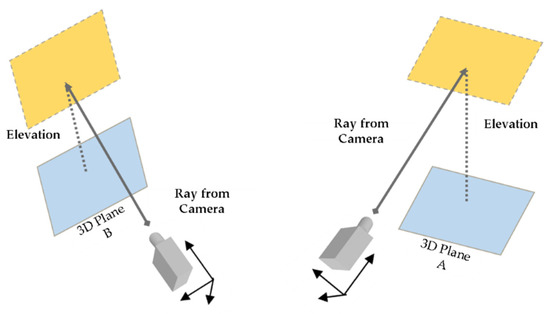
پس از شناسایی و استخراج صفحه بهینه، موقعیت نقطه اولیه ضمیمه می شود. نقطه اولیه را می توان با داده های ورودی تعاملی یا داده های موجود دقیق محاسبه کرد. پس از به دست آوردن موقعیت، یک پرتو از موقعیت تقاطع و موقعیت دوربین ایجاد می شود تا نقطه تقاطع در صفحه را برای نمایش به دست آورد. سپس می توان با حل معادله پرتو و معادله پارامتر صفحه، موقعیتی را که نقطه اولیه صفحه را قطع می کند محاسبه کرد. شکل ۳ روند محاسبه را نشان می دهد.
معادله (۱) فرمول محاسبه نقطه تقاطع بین صفحه و پرتو تشکیل شده از نقطه اولیه و دید دوربین را نشان می دهد. در هندسه اقلیدسی، پرتو به عنوان نقطه ای در یک خط مستقیم و بخشی از خط در یک طرف نقطه تعریف می شود (به معادله (A1) – (A3) مراجعه کنید). در این مقاله، سیستم snapping از سه نوع سناریو معادله پرتو استفاده میکند، یعنی پرتو به صفحه (پرتو هر صفحه را در فضا قطع میکند)، پرتو به خط (پرتو هر خط مستقیم را در فضا قطع میکند) و پرتو به صفحه. نقطه (اشعه هر نقطه در فضا را قطع می کند).
[ خطای پردازش ریاضی ]
همانطور که در معادله (۱) نشان داده شده است، از طریق حرکت دوربین، چرخش، و سایر حرکات، معادلات پرتوی تولید شده توسط نمای AR متفاوت است، و مختصات تقاطع آنها در معادله صفحه نیز متفاوت است. با این واقعیت می توانیم تقاطع را در هر نقطه از صفحه محاسبه کنیم و هر مختصاتی را در صفحه بدست آوریم.
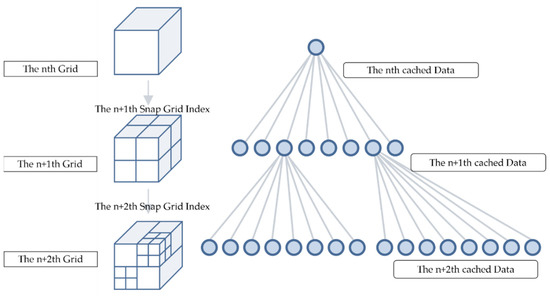
هنگامی که نقطه تلاقی نقطه اولیه با معادله ماتریس صفحه به دست آمد، سیستم snapping سپس ماژول محدودیت مجازی را فعال می کند. با این نقطه تقاطع، یک سیستم نمایه سازی شبکه تطبیقی و پویا را می توان با الگوریتم پرس و جوی octree فضایی سه بعدی [ ۴۷ ] ساخت. بر اساس تغییرات در نمای AR، شبکههای جدید طبق قوانین پرس و جوی octree بازیابی میشوند. دادههای موجود و دادههای تازه جمعآوریشده با شبکههای جدید استخراج میشوند و شاخص شبکه octree جدید با نتایج استخراج بهروزرسانی میشود تا فهرست و دادهها به روز نگه داشته شوند. شاخص های شبکه ای که باید دوباره واکشی شوند و باید به صورت محلی یا حافظه پنهان شوند، با توجه به موقعیت نمای AR تعیین می شوند. مدل octree تطبیقی در شکل ۴ نشان داده شده است.
در محیطهای پیچیده محلی و بزرگ مقیاس، کارایی سیستم snapping با استفاده از ساختار شاخص شبکه octree، بهویژه پرس و جو، بهروزرسانی حافظه پنهان و محاسبات تطبیقی به طور قابل توجهی افزایش مییابد. بنابراین، شاخص octree برای دستکاری و جمع آوری داده های موجود و جمع آوری شده در سایت در MAR بسیار مهم است. در محیط های کوچک یا ساده، شاخص octree را نیز می توان برای کاهش سطح و تعداد در محدوده شبکه سفارشی کرد.
پس از تعیین مکان نقطه اولیه و مدل octree، محدودیت های مجازی سه بعدی برای AR snapping را می توان با استفاده از داده های موجود ایجاد کرد. اولین مرحله محاسبه نقطه اتصال گیره است. میتوان آن را با محاسبه محدودیتهای مجازی برای اشیاء هدف، مانند صفحات، قطعات خط، گرهها و نقاط پایانی به دست آورد.
هنگام ضربه زدن روی هواپیماهای دیگر، ابتدا باید نزدیکترین مجموعه هواپیماها به نمای AR محاسبه شود. نقطه (a, b, c) در شش درجه فضای آزادی و نقطه طرح (x ۰ , y ۰ , z ۰ ) روی صفحه یک خط را تشکیل می دهد. خط باید موازی با بردار معمولی صفحه باشد. با این کار، مجموعه صفحه را می توان با مراحل زیر محاسبه کرد: مختصات (x ۰ , y ۰ , z ۰ ) را با قرار دادن نقطه اتصال و بردار نرمال در فرمول محاسبه می کنیم. فاصله بین نقطه اتصال (a, b, c) و نقطه طرح (x ۰ , y ۰ , z ۰) سپس قابل محاسبه است. در نهایت، میتوانیم یک آستانه فاصله مشخص کنیم و مجموعه صفحاتی را با کمترین فاصله بازیابی کنیم [ ۴۸ ]. در طول فرآیند snapping، میتوانیم از این فرمول برای محاسبه نقطه پیشبینی نقاط اتصال در سطوح مختلف مانند صفحه عمودی، صفحه مقطع، صفحه بالا و زمین ارتفاعات مختلف استفاده کنیم. شکل ۵ قیود محدودیت های مجازی بلادرنگ در سطوح مختلف عمودی را نشان می دهد.
پس از تعیین موقعیت طرح نقطه اتصال در صفحه گیر، یک مدل شبکه تطبیقی ایجاد می شود. بخش ۳٫۵ فرآیند را به طور عمیق شرح می دهد. لطفا برای اطلاعات بیشتر به آن بخش مراجعه کنید.
هنگامی که مدل شبکه تطبیقی ایجاد شد، خطوط ارتفاع بهینه را می توان تعیین کرد و موقعیت های نشانگر برای تراز کردن خطوط ارتفاعی را می توان با استفاده از داده های محدودیت مجازی در نمای AR محاسبه کرد. در طی این فرآیند، یک بردار پرتو در جهت دریچه دید دوربین و یک گروه برداری از خطوط ارتفاعی تولید می شود. سپس زاویه بین دو بردار محاسبه می شود. هرچه زاویه کوچکتر باشد، در یک خط مستقیم به جهت دید دوربین نزدیکتر می شود. دو بردار برای ساخت کواترنیون ها و استخراج زوایای اویلر استفاده می شود که به صورت مراحل زیر اجرا می شود: (۱) محاسبه بردار نقطه هدف استخراج شده از دید دوربین به پرتو. (۲) مقدار کواترنیون بین دو بردار را محاسبه کنید. و (۳) با توجه به فرمول کواترنیون و زاویه اویلر، زاویه بین دو بردار را می توان معکوس کرد. (۴) از آنجایی که تمام قطعات ارتفاع افقی هستند، محور چرخش (۰، ۱، ۰) است و حداقل مقدار تمام زوایا را می توان بدون تبدیل چرخش محاسبه کرد.
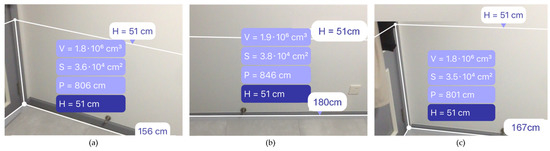
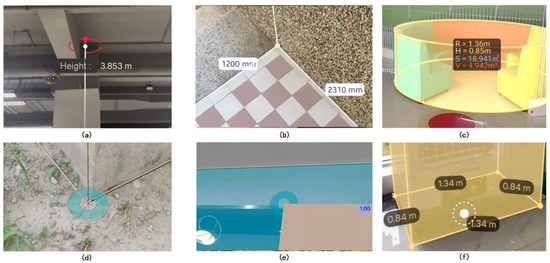
شکل ۶ نشان می دهد که ARSnap در زمان واقعی اطلاعات نشانگرهای مجازی مختلف را از زوایای مختلف از دوربین موبایل می گیرد. مشاهده میشود که اطلاعات ارتفاع شی مجازی و همچنین سایر اطلاعات محیطی و حجمی جمعآوریشده توسط سیستم، همیشه میتوانند کاربر محور باشند، و اطلاعات ارتفاع همیشه به کانتور صفحه بالایی متصل میشود و این امکان را به شما میدهد. کاربر برای بررسی تغییر نتیجه ارتفاع. محیط و حجم باید نمایش بهینه دریچه دید دوربین را در چندوجهی نامنظم جمع آوری شده توسط سیستم در نظر بگیرد، یعنی باید بتواند موقعیت مناسب چند وجهی نامنظم را در زیر زوایای دید مختلف دوربین به طور دقیق نمایش دهد، نه اینکه محدود به یک صفحه یا خط کانتور.
همانطور که قبلاً توضیح داده شد، وظیفه نمایش بهینه اتصال خط ارتفاعی، یافتن صفحه بهینه و تعیین مکان نقطه اتصال نمای AR است که روی این صفحه بهینه قطع شده است. محل اشیاء شکسته شده، که با درها یا پنجرهها در هر صفحه سهبعدی همراستا است، میتواند با ارتفاع بهینه نیز شناسایی شود. در این فرآیند، بردارها از پرتو جهت درگاه دید دوربین تولید می شوند. بردارهای عادی از مختصات صفحات سه بعدی در هر فضای سه بعدی استخراج می شوند. تقاطع بردارهای پرتوی درگاه دید دوربین با بردارهای صفحه مرتبط محاسبه میشود و بردار با کمترین فاصله به صورت تکراری تعیین میشود. علاوه بر این،شکل ۳ ) و سپس فاصله عمودی بین نقاط تقاطع و صفحه مربوطه را استخراج کنید. کل فرآیند در شکل ۷ نشان داده شده است .
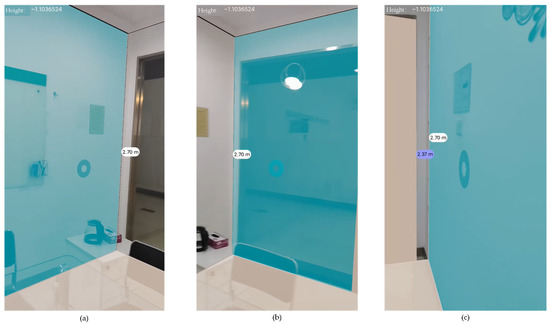
دو نوع محدودیت میدان دید در MAR وجود دارد. اولین مورد این است که کاربر نمی تواند نتیجه ضربه خوردن یک شی واقعی یا مجازی روی زمین را از فاصله دور ببیند. مورد دیگر این است که کاربر نمی تواند نتایج عکسبرداری را خارج از میدان دید خود ببیند. در این مطالعه، ترکیبی از میلههای نشانگر و دایرههای زمین برای کمک به ایجاد یک اثر بیننده مرتبط با فاصله در شماره اول استفاده شده است. شکل ۸دو مجموعه از میله های نشانگر و دایره های زمین را در فواصل مختلف نشان می دهد. با رندر زمان واقعی میلههای نشانگر و دایرههای زمین، گرفتن اطلاعات در مکانهای مختلف دائماً رو به روی کاربر و برجسته میشود. تغییر اندازه دایره زمین درک موثری از فاصله گیر دادن را فراهم می کند. مدل نوار نشانگر که همیشه به صورت عمودی است و اندازه آن تطبیق پذیر است، موقعیت دقیق محل گیر کردن را فراهم می کند. علاوه بر این، شی واقعی یا شی مجازی را می توان تحت شرایط فاصله مختلف گرفت.
این سیستم قادر است محدودیت های مجازی را فراتر از محدوده دید کاربر برای مشکل دوم درک کند. هنگامی که یک آیتم واقعی یا مجازی مناسب ضبط میشود، سیستم این محدودیتها را خارج از میدان دید کاربر تجسم میکند، با سطوح شفاف با تحمل خاص برای هواپیماها گسترش مییابد، و با خطوط توپر نقطهدار برای لبهها گسترش مییابد. این رویکرد به جای محدود شدن به میدان دید فعلی، این مزیت را دارد که کاربر را به سمت استخراج محدودیت جهانی مناسب راهنمایی میکند. لازمه اینجا این است که روش عکسبرداری محدود به میدان دید دوربین نباشد و بتواند صحنه را به صورت جهانی تجزیه و تحلیل کند.
۳٫۴٫ روش تجزیه تطبیقی ARSnap
برای ارائه توصیههای فوری در یک طرحبندی تعاملی از دادههای فضایی در مقیاس بزرگ، الگوریتمها باید توانایی تجزیه و تحلیل موثر دادههای نقشه در مقیاس بزرگ، از جمله پرس و جو، به دست آوردن و نمایش نقشهها را داشته باشند. فناوری شبکه منظم برای مدلسازی نقشه استفاده میشود [ ۴۹]. علاوه بر این، سیستم مختصات در سیستم AR معمولاً یک سیستم مختصات غیرپرتابی صفحه است و سیستم مختصات نقشه معمولاً یک سیستم مختصات جغرافیایی است. در محاسبه نگاشت مختصات در نقشه به مختصات در AR، از آنجایی که سیستم مختصات جغرافیایی شامل مختصات کروی است، محاسبه دقیق فاصله، زاویه، مساحت و سایر پارامترها دشوار است و یک سیستم مختصات پیش بینی شده معمولا استفاده می شود. با این حال، سیستم مختصات پیش بینی شده بر اساس روش های طرح ریزی آن می تواند با محدودیت های مربوطه همراه باشد. به عنوان مثال، به دلیل استفاده از محاسبات متساوی الاضلاع با توجه به فاصله عرض جغرافیایی، به ویژه در مناطق با مقادیر مطلق عرض جغرافیایی، خطاهایی در برجستگی مرکاتور (برآمدگی استوانه ای برابر روی محور مثبت) رخ می دهد. هر چه قدر مطلق عرض جغرافیایی بیشتر باشد، ناحیه کروی بیشتر کشیده می شود و خطا بیشتر می شود. این مقاله از فرمول طرح ریزی Mercator برای محاسبه فاصله برای حذف خطا استفاده می کند (به معادله (A4) مراجعه کنید).
برای به دست آوردن داده های نقشه به سرعت و به صورت دسته ای در فرآیند ضبط بلادرنگ، نقشه ها کاشی کاری شده و شماره گذاری می شوند که شاخص شبکه بر اساس آن ها در سطوح مختلف مقیاس است. روش تجزیه تطبیقی پیشنهاد شده در این تحقیق بر اساس یک شبکه منظم است. داده های نقشه تبدیل شده را بر اساس قانون تعداد ردیف های شبکه، ستون ها و مقدار ارتفاع (i، j، h) به زیر دامنه های تجزیه یکنواخت مساحت مساوی تقسیم می کند. با فرض اینکه مبدا داده های نقشه تبدیل شده به یک سیستم مختصات صفحه (x0, y0) باشد، اندازه کاشی نمایش نقشه AR اندازه کاشی است و فاصله واقعی که با ۱ پیکسل در صفحه نقشه AR نشان داده می شود وضوح است. فرمول چارچوب بندی نقشه بر اساس یک شبکه منظم در معادله (۲) نشان داده شده است. شماره سطر و شماره ستون نقطه مختصات (xN،
[ خطای پردازش ریاضی ]
در طی فرآیند عکسبرداری تعاملی، منطقه نقشه مربوطه در نمای AR تغییر می کند. این روش یک شبکه جدید را بر اساس تغییر منطقه نقشه استخراج می کند، از شبکه جدید برای استخراج داده های اصلی و داده های جدید استفاده می کند و نتایج استخراج را به شاخص شبکه octree جدید منعکس می کند. داده های شاخص به صورت پویا با این روش به روز می شوند [ ۵۰ ، ۵۱ ].
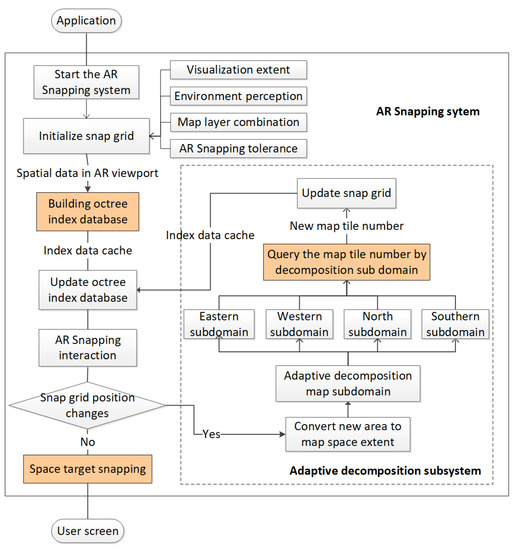
مدل snapping AR بر اساس تجزیه تطبیقی در شکل ۹ نشان داده شده است . ابتدا، شبکه snap از طریق محدوده تجسم مجازی نمای AR و اطلاعات اولیه تشخیص محیط واقعی مقداردهی اولیه می شود. پس از ایجاد شبکه snap، دادههای محدودیت مجازی یک نقشه پیشینی را در محدوده نمای اولیه جستجو میکنیم و یک پایگاه داده شاخص octree ایجاد میکنیم. این داده های شاخص توسط ماژول محدودیت مجازی سه بعدی که در بخش ۳٫۳ توضیح داده شده است، جمع آوری و محاسبه می شوند.. هنگامی که کاربر عملیات ژست تعاملی روی صفحه یا عملیات تعاملی حرکت دوربین را انجام می دهد، برای منطقه مرور جدید تولید داده، کار بازسازی شبکه را بر اساس تجزیه تطبیقی آغاز می کنیم (از این پس ماژول تجزیه تطبیقی نامیده می شود). ماژول تجزیه تطبیقی ابتدا مختصات ناحیه جدید ایجاد شده توسط تعامل را تبدیل می کند و محدوده مختصات مکانی را با ارجاع جغرافیایی یکپارچه به داده های مجازی نقشه محاسبه می کند. سپس، به طور تطبیقی محدوده نقشه نزدیک درگاه دید را با توجه به جهت حرکت درگاه نمایش محاسبه می کنیم، محدوده زیر دامنه را با توجه به میدان دید در این جهت قفل می کنیم، محدوده جدید زیر دامنه و محدوده نقشه اصلی را با هم ادغام می کنیم تا یک محدوده جدید ایجاد شود. محدوده نقشه، محاسبه تعداد ردیف و ستون محدوده نقشه در شبکه نقشه، و محدوده موثر viewport را با توجه به شماره سطر و ستون به روز کنید. داده های مجازی نقشه مربوطه از طریق شماره ردیف و ستون به دست می آیند و پایگاه داده شبکه اسنپ به روز می شود. سپس داده های شاخص از پایگاه داده snap grid استخراج و به پایگاه داده octree index به روز می شوند. در نهایت، مدل AR snapping به عملیات snap تعاملی جدید کاربر برنامه از طریق پایگاه داده شاخص octree به روز شده پاسخ می دهد.
۳٫۵٫ مدلسازی بصری ARSnap
مدل بصری و رندر مربوطه برای تکمیل اطلاعات صحنه واقعی در AR مورد نیاز است [ ۵۲ ]. برای مرتبط یا معنادار نگه داشتن اطلاعات، مدل ها باید به گونه ای قرار گرفته و نمایش داده شوند که از نظر هم ترازی، چشم انداز و زمین در دنیای واقعی ادغام شوند.
هنگامی که ARSnap هر صفحه افقی را تشخیص می دهد، مدل قبلی مجازی مربوطه باید به درستی بر روی صفحه تصویر صفحه تلفن همراه نمایش داده شود تا رفتار تعامل کاربر را برای به دست آوردن نتایج محاسبه عکس صحیح هدایت کند. برای این منظور، وضعیت واقعی مدل، از جمله محاسبات جهت و موقعیت، باید برآورد شود. کد دوبعدی یا گرادیان برای جهت دهی ویژگی های شناسایی شده برای مقایسه با کد دو بعدی یا گرادیان ویژگی مربوطه در مدل هدف برای دستیابی به هدف فوق استفاده می شود. علاوه بر این، فاصله بین ویژگی های مجاور به محاسبه مقیاس کمک می کند. فرآیند فوق منجر به ماتریس چرخش مرتبط R و بردار ترجمه t می شود که می تواند طبق معادله (A8) هر نقطه از مدل قبلی مجازی را روی صفحه متحرک نمایش دهد.
در فرآیند MAR، کاربر دوربین را به سمت هدف مربوطه نشانه میگیرد و دو حالت تعامل طبیعی را انجام میدهد: عملکرد تعاملی ژست صفحه نمایش لمسی و عملکرد حرکت بدن دوربین تلفن همراه برای اصلاح و تأیید نتایج ضبط هدف فضایی در زمان واقعی. بر اساس مدل نمای بصری ARSnap فوق، نماهای بصری نتایج مختلف snapping هدف فضایی در شکل ۱۰ نشان داده شده است.
۴٫ آزمایش و بحث
سیستم نمونه اولیه ARSnap مبتنی بر Android ARCore برای آزمایش عملکرد ضبط پیاده سازی شده است. کل آزمایش شامل عکسبرداری روی دستگاههای مختلف در صحنه واقعی و جمعیت واقعی، در سناریوها و کاربردهای مختلف پیچیده است. علاوه بر این، آزمایش همچنین زمان snapping را در برابر محدودیتهای مجازی مختلف در صحنه واقعی، نتایج اکتساب با snapping و بدون snapping و دقت را با الگوریتمهای مختلف ضبط مقایسه کرد. نتایج ضبط محیط های داخلی با MagicPlan و ARPlan3D نیز مورد تجزیه و تحلیل قرار می گیرد تا بررسی شود که آیا ARSnap از برنامه های کاربردی محبوب بهتر عمل می کند یا خیر. جزئیات بیشتر در مورد MagicPlan و ARPlan3D را می توان در مراجع [ ۵۳ ، ۵۴ ، ۵۵ ] یافت.
ما رویکرد خود را از چند جنبه ارزیابی می کنیم. ابتدا، از طریق تجزیه و تحلیل زمانبر و تجزیه و تحلیل استحکام هر فرآیند اجرا در ARSnap، ما نتایج کمی مجموعههای متعدد سناریوهای کاربردی عملی را نشان میدهیم که کارایی الگوریتم ARSnap را ثابت میکند. دوم، ما نتایج ضبط خود را با روش های مبتنی بر پرس و جوهای محدوده مکانی مقایسه می کنیم [ ۲۹ ]. سوم، ما نتایج کیفی مجموعه ای از صحنه های داخلی و خارجی تازه جمع آوری شده را نشان می دهیم.
۴٫۱٫ آزمایش کمی ثبت داده های مکانی ARSnap
الگوریتم های متداول گرفتن شامل الگوریتم ضبط سنتی فوق الذکر (براساس الگوریتم پرس و جو فضای DB) است که شرایط پرس و جو را با توجه به روابط فضایی مانند تقاطع، مهار و موازی عمودی از طریق اشیاء فضایی ساخته شده، نقاط عبور، خطوط، سطوح، و یک مجموعه داده منطبق الگوریتم یک پرس و جو فضایی را انجام می دهد و رکورد نتیجه مجموعه را با هر لایه قابل مشاهده به عنوان واحد به دست می آورد. مجموعه رکورد نتیجه شامل نقطه، خط، ناحیه، متن و سایر اشیاء عنصر همه لایههای قابل مشاهده در نقشه فعلی است. علاوه بر این، بر اساس الگوریتم گرفتن مدل شبکه ثابت، گروه نقطه به شبکهها تقسیم میشود و یک شاخص فضایی برای دستیابی به جذب کارآمد ایجاد میشود. الگوریتم گرفتن که در این مقاله معرفی شد، بر اساس مدل شبکه پویا و شبکه توزیع شده پویا، می تواند به صورت پویا عناصر نمای را با توجه به محدوده جغرافیایی مقیاس نقشه مدل کند، فهرست شاخص حافظه را که نمای کامل نقشه را پوشش می دهد، و اشیاء پرس و جو و فضایی را با توجه به فضای مکانی تشکیل دهد. فهرست مطالب. قضاوت رابطه برای گرفتن اشیا استفاده می شود. برای گره های سه بعدی (شامل تلاقی گره ها و خطوط)، نقاط سطح، نقاط خط، خطوط عمودی، و خطوط گسترش، که پنج نوع گرافیک را تشکیل می دهند، ما کارایی عملیاتی این سه الگوریتم ضبط شی فضایی (مصرف زمان بر حسب میلی ثانیه) را مقایسه می کنیم. ( و اشیاء پرس و جو و فضا با توجه به شاخص فضایی. قضاوت رابطه برای گرفتن اشیا استفاده می شود. برای گره های سه بعدی (شامل تلاقی گره ها و خطوط)، نقاط سطح، نقاط خط، خطوط عمودی، و خطوط گسترش، که پنج نوع گرافیک را تشکیل می دهند، ما کارایی عملیاتی این سه الگوریتم ضبط شی فضایی (مصرف زمان بر حسب میلی ثانیه) را مقایسه می کنیم. ( و اشیاء پرس و جو و فضا با توجه به شاخص فضایی. قضاوت رابطه برای گرفتن اشیا استفاده می شود. برای گره های سه بعدی (شامل تلاقی گره ها و خطوط)، نقاط سطح، نقاط خط، خطوط عمودی، و خطوط گسترش، که پنج نوع گرافیک را تشکیل می دهند، ما کارایی عملیاتی این سه الگوریتم ضبط شی فضایی (مصرف زمان بر حسب میلی ثانیه) را مقایسه می کنیم. (جدول ۱ ).
ما دریافتیم که میانگین زمان عکسبرداری بر اساس الگوریتم تصویربرداری مدل شبکه پویا پیشنهاد شده در این مقاله برای پنج نوع گرافیکی نقاط پایانی، گرهها، نقاط خط، خطوط عمودی و خطوط توسعه در ۷۰ میلیثانیه است، در حالی که میانگین زمان ضبط بر اساس الگوریتم پرس و جو فضای DB بیش از ۵۵۰ میلیثانیه است و میانگین زمان ضبط الگوریتم ضبط براساس مدل شبکه ثابت نیز بیش از ۱۰۰ میلیثانیه است. الگوریتم گرفتن پیشنهادی در این مقاله زمان می برد تا به طور قابل توجهی بهتر از دو الگوریتم دیگر عکس برداری کند.
همچنین میانگین زمان مصرف این الگوریتم را در فرآیندهای فرعی مقایسه می کنیم ( جدول ۲ ). میانگین زمان مصرف پرس و جو شاخص شبکه ای در ۱۵ میلی ثانیه است و متوسط زمان مصرف فرآیند ضبط و شناسایی هدف در ۳۰ میلی ثانیه است. وضعیت نتیجه ترسیم شده است. میانگین زمان در ۲۲ میلی ثانیه و میانگین کل زمان در ۷۰ میلی ثانیه است. الگوریتم جذب هدف فضایی بر اساس مدل شبکه پویا طراحی شده در این تحقیق، مصرف زمان کمی دارد و میتواند به طور موثر به تصویر گرافیکی دست یابد.
در نهایت، محافظهکارانهترین شرایط ضبط را با دقت snapping سنتی و همه رویدادهای snapping مقایسه کردیم. ما مجموعه های متعددی از تجزیه و تحلیل واریانس ناحیه هدف را در افراد انجام دادیم. مناطق هدف شامل خطوط و نقاط مشخصه برجسته، خطوط و نقاط مشخصه غیر آشکار و غیره است که نزدیک به محیط تولید جمع آوری داده های سیستم AR واقعی هستند [ ۴۹ ]. نتایج نشان می دهد که تاثیر مثبت و معنی داری بر ARSnap در مقایسه با snapping و snapping سنتی وجود دارد.
در میان آنها، مقایسه بین عدم گیر کردن و گیرکردن پیشنهاد شده در این مقاله مهم ترین است، میزان خطای نتایج جمع آوری به طور کلی کم است و دقت نتایج جمع آوری از تقریباً ۳ دسی متر به ۲-۵ سانتی متر بهبود یافته است. به طور مشابه، از مقایسه اسنپ سنتی و ARSnap در این مقاله، ضبط در این مقاله به طور قابل توجهی دقت اکتساب دادههای گرافیکی پیچیده و دادههای استریو و فواصل طولانی را بهبود بخشیده است. این به دلیل استفاده از فناوری محاسبه معادله محدودیت سه بعدی مجازی برای بهبود گرافیک سه بعدی پیچیده است. دقت این روش میزان خطای عملیات سبک آزاد دستی را کاهش می دهد. علاوه بر این، ادغام مکانیسم داده پویا-شاخص به روز رسانی شبکه تطبیقی دقت ثبت داده های در مقیاس بزرگ را در نقشه AR بسیار بهبود می بخشد. نتایج مقایسه دقت خاص در نشان داده شده استجدول ۳ .
۴٫۲٫ آزمایش کیفی ضبط داده های مکانی ARSnap
در این بخش، صحنههای داخلی و خارجی تازه جمعآوریشده را آزمایش میکنیم و به طور سیستماتیک نتایج کیفی الگوریتم ضبط معرفیشده در این مقاله را تأیید میکنیم. وظیفه هم ترازی و کار غیر هم ترازی در تصویر با هم مقایسه می شوند.
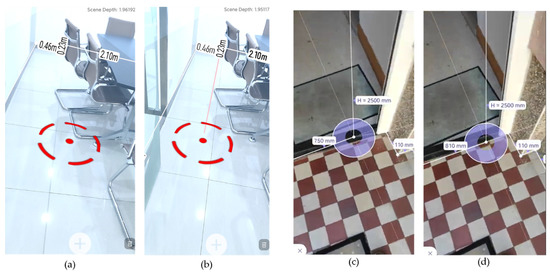
از آنجایی که روش پیشنهادی در این مقاله مبتنی بر فناوری هندسه محاسباتی سه بعدی است، از مدلسازی هندسی بلادرنگ تمام دادههای قبلی و دادههای جمعآوریشده پشتیبانی میکند. با توجه به جهت پنجره دوربین AR، پایگاه داده محدودیت مجازی پس از مدلسازی هندسی قابل استعلام است و ضبط بلادرنگ با محدودیت مجازی سه بعدی نقاط سطحی معمولی، نقاط خطوط سه بعدی، نقاط میانی سه بعدی، نقاط پایانی سه بعدی، سه بعدی مطابقت دارد. خطوط موازی، خطوط توسعه ۳ بعدی، خطوط ارتفاع سه بعدی، خطوط لبه سه بعدی و انواع دیگر داده ها، که در هنگام تحقق بخشیدن به داده های جمع آوری داده های تعاملی AR، با جابجایی به موفقیت زیادی نیاز ندارند. این روش ضبط زمان مورد نیاز برای کار تعاملی را کاهش می دهد و در نتیجه خستگی را کاهش می دهد. علاوه بر این،۲۶ ]. بر اساس ناوبری بصری-اینرسی AR و الگوریتم اشعه سه بعدی برای گرفتن هر نقطه در صفحه سه بعدی مشخص شده، نتیجه مقایسه در شکل ۱۱ نشان داده شده است .
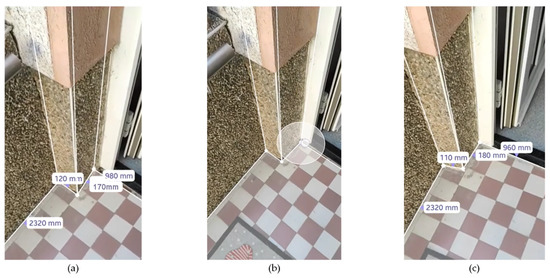
ما اثرات نتایج تجسم گرفته شده را روی چشم انسان آزمایش می کنیم. ما به طور جداگانه نقاط پایانی، نقاط شکست، نقاط، لبه ها، نقاط روی سطح، خطوط گسترش، خطوط افقی و خطوط عمودی که معمولاً در جمع آوری داده های GIS استفاده می شوند را ضبط می کنیم و آنها را از دیدگاه تجربه کاربر تأیید می کنیم. شکل ۱۲ و شکل ۱۳ نتایج آزمون ضبط AR از سه نوع داده در جمع آوری داده های GIS را خلاصه می کنند.
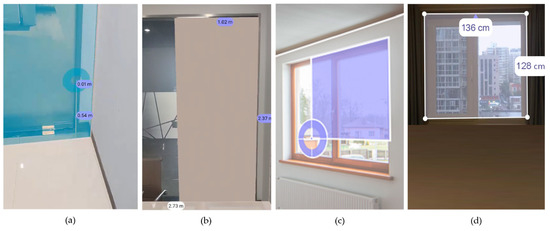
به منظور بررسی راه حل الگوریتم ضبط در این مقاله برای قضاوت موقعیت مکانی موجودیت های جغرافیایی سه بعدی و قضاوت رابطه مدل ساختمان داخلی ۳DGIS و همچنین برای آزمایش دقت الگوریتم ضبط در مدل سازی داده های مکانی، ما گروهی از درها و پنجرههای ساختمانها را بهترتیب ضبط کنید و آنها را از دیدگاه تجربه کاربر تأیید کنید. شکل ۱۴ نتایج آزمایش درب و دیوارهای داخلی ساختمان را بر اساس محدودیت های معنایی ۳DGIS خلاصه می کند.
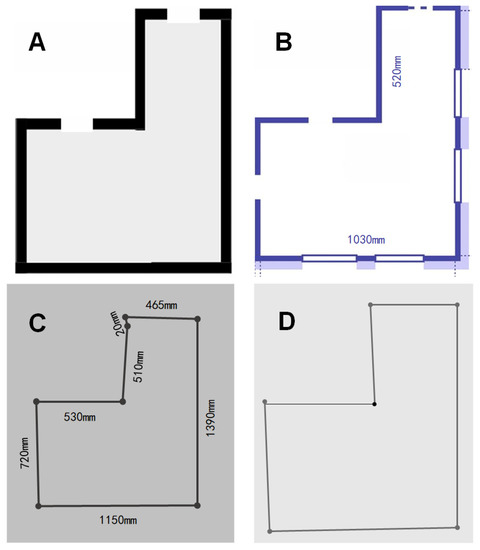
در نهایت، برای تعیین اینکه آیا ARSnap پیشنهاد شده در این مقاله میتواند نتایج مشابهی را با برنامه بررسی شده ارائه دهد، یک آزمون مقایسه کیفی بین ARSnap و برنامه بررسی شده انجام میدهیم. وظیفه تست گرفتن یک اتاق تا حد امکان نزدیک به تصویر اصلی است. ARSnap یک ماژول نمای دو بعدی ایجاد می کند که نتایج گرفته شده را در برنامه نمایش می دهد. همچنین از صادرات نتایج جمعآوریشده برای تولید در Unity پشتیبانی میکند، به طوری که نتایج تولید شده را میتوان برای مقایسه با چیدمان اتاق اصلی [ ۵۶ ] در بالای چیدمان اتاق اصلی (فایل CAD) قرار داد. مقایسه ای کنار هم از نتایج جمع آوری شده در همان اتاق در شکل ۱۵ نشان داده شده است .
آزمایش های مقایسه ای نشان می دهد که برنامه های انتخاب شده می توانند به درستی طرح کلی اتاق را به تصویر بکشند. RoomScan و ARSnap همانطور که در این مقاله پیشنهاد شده است بهترین قابلیت های snapping و alignment را دارند. ARSnap با روش تجزیه تطبیقی زمان تراز کوتاه تری نسبت به RoomScan دارد. از آنجایی که تمام دیوارها مستقیم هستند، نتایج مجموعه خطوط افقی سه بعدی، خطوط عمودی سه بعدی و خطوط توسعه سه بعدی استفاده شده در این مقاله تقریباً کاملاً با چیدمان دیوار اتاق اصلی مطابقت دارد. ARPlan3D و ARSnap برخی از خطاهای طولی را هنگام اندازه گیری دیوارها ایجاد می کنند. دلیل آن این است که هر دوی آنها از موتور ARCore اندروید استفاده میکنند و دقت تخمین پوز در یک محیط هواپیما کمی ضعیفتر از موتور ARKit است که توسط RoomScan و Magicplan استفاده میشود. مقایسه نشان میدهد که RoomScan و ARSnap به چیدمان اتاق اصلی نزدیکتر هستند و هر دو نتایج بسیار مشابهی را نشان میدهند. راندمان جمع آوری ARPlan3D بسیار بالا است و سریع ترین مجموعه در بین همه برنامه ها است، اما نتیجه نهایی کاملاً متفاوت از چیدمان اتاق اصلی است. درب Magicplan و مرجع شروع به خوبی در یک راستا قرار دارند، اما هنگام حرکت به گوشه ای دور، یک خطای محاسباتی رخ می دهد.
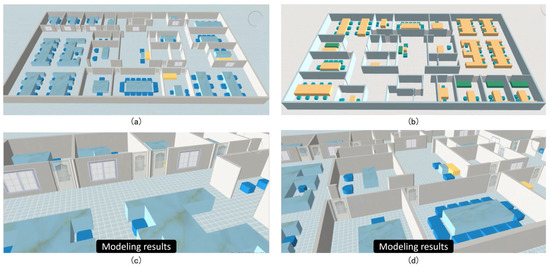
به منظور بررسی بیشتر در دسترس بودن روش گرفتن مدل سه بعدی پیشنهاد شده در این مقاله، ما مدل سه بعدی کاملی را برای دو گروه زیرساخت داخلی انجام می دهیم. نتایج اکتساب شامل اطلاعات هندسی مانند طول، عرض، ارتفاع، پنجره و در، سبک و دسته مدل است. این اطلاعات را می توان از طریق وارد کردن نرم افزار مدل سازی نمایش داد و بیشتر اعمال کرد. نتایج مدلسازی مدل سهبعدی داخلی بهدستآمده بر اساس ARSnap در یکپارچگی در شکل ۱۶ نشان داده شده است.
۴٫۳٫ بحث
مطالعه حاضر به منظور توسعه یک روش سریع و دقیق snapping هدف فضایی طراحی شده است. با در نظر گرفتن دادههای مکانی همان طرح کلی ساختمان به عنوان مثال، الگوریتم ARSnap (روش ما) به طور قابلتوجهی کارآمدتر و دقیقتر از روشهای رایج است. به دلیل بهروزرسانیهای دینامیکی شبکه تطبیقی بهینه و محدود کردن میدان دید، برای دستیابی سریع طرحهای ساختاری در منطقه کوچک عملی است و به انواع دوربینها مانند دوربینهای دوچشمی یا دوربینهای عمق محدود نمیشود. بنابراین، برای دوربین های کوچک و سایر تجهیزات کوچک قابل استفاده است. در حالی که الگوریتم سنتی به مقدار زیادی از حرکت انسان و زمان پردازش طولانی برای محاسبه درک محیط نیاز دارد.
هنگام مدلسازی مدلهای سهبعدی داخلی اتاقهای جلسات عمومی یا ساختمانها، دقت الگوریتم snapping ارائهشده در این مقاله نزدیک به ۲۰ برابر بهتر از دقت بدون snapping است. یافتههای گزارششده در اینجا نشان میدهد که استخراج محدودیتهای مجازی از محیط واقعی در روش snapping سهبعدی برای اکتساب دادههای مکانی AR قابل توجه است [ ۲۹ ].
برخلاف روشهای snapping موجود، ARSnap پیشنهادی ما یک روش سریع و دقیق برای برداشتن عناصر فضایی سهبعدی، مانند خطوط توسعهیافته سهبعدی، خطوط عمودی سهبعدی، دروازههای سهبعدی و اشیاء سهبعدی نامنظم است. در تراز سه بعدی منظم و اصلاح نتایج، ARSnap مزایای قابل توجهی نسبت به روش های دیگر دارد. با این حال، تحقیقات ما ممکن است چندین محدودیت داشته باشد. استفاده از موتور AR گوشی هوشمند [ ۵۷]، دقت روش ما برای تخمین موقعیت در محیط های پیچیده در مقایسه با برنامه های کاربردی با دوربین های Lidar و دوربین های دوچشمی، جای پیشرفت زیادی دارد. علاوه بر این، تغییر ارتفاع و تغییر حالت عملیات بصری نیست و باعث سردرگمی بصری می شود. این امکان وجود دارد که پنهان کردن اطلاعات غیر ضروری و تنها نمایش آنها در هنگام تغییر ارتفاع عمل خوبی باشد.
روش مبتنی بر تجزیه تطبیقی پیشنهاد شده در این مقاله میتواند با ضبط سریع و بارگذاری بصری انواع دادههای نقشه تطبیق داده شود و از نمایش زمان واقعی و دقیق نتایج مختلف عکسبرداری پشتیبانی کند تا حداکثر کارایی تجسم نقشه برداری را به دست آورد. در MAR.
در نهایت، با نگاشت اطلاعات فضایی تولید شده توسط فرآیند ضبط و گرفتن نتایج از صفحه دو بعدی به دنیای فیزیکی، مدل سه بعدی ساختمان به طور مستقیم شناسایی می شود و سطوح نامنظم مربوطه مانند پایین، دیوار، بالا ، در و پنجره با دستگاه های تلفن همراه بر روی ساختمان واقعی قرار می گیرند تا نتایج بالقوه ضبط را در محل قرار داده و تصحیح کنند.
۵٫ نتیجه گیری و کار آینده
۵٫۱٫ نتیجه گیری
جمع آوری داده های مکانی یک عملکرد مهم در ترسیم نقشه و ویرایش داده های مکانی است. الگوریتم های سریع و کارآمد جمع آوری داده های مکانی می توانند کارایی ویرایش داده های مکانی را تا حد زیادی بهبود بخشند و هزینه های زمانی را کاهش دهند. مقاله حاضر یک الگوریتم جذب دینامیک جدید برای اهداف فضایی در MAR پیشنهاد میکند. الگوریتم یک مکانیسم نمایه سازی شبکه ای تطبیقی و پویا است. این یک مدل محدودیت مجازی بر اساس هندسه محاسباتی سه بعدی می سازد و یک تصویر دو بعدی را بر روی رابط لمسی می سازد. یک رابطه تراز از محیط واقعی ۳ بعدی AR استخراج می شود. با تقسیم منطقی ناحیه ای که هدف فضایی مشخص شده در نقشه AR در آن قرار دارد، داده های عنصر به دست می آیند، جدول فهرست شاخص کلید-مقدار مجموعه رشته نقطه شاخص شبکه و لیست پیوندی سلسله مراتبی عنصر ایجاد می شود. و انگشت یا دوربین کاربر با استفاده از رابط لمسی شناسایی می شود. دو حالت تعاملی طبیعی حرکت مستقیماً پرس و جو، محاسبه و تحلیل اهداف فضایی با کارایی بالا را ضبط می کند.
ما بطور تجربی میانگین زمان ضبط الگوریتم پرس و جو فضای DB پیشنهاد شده در این مقاله و الگوریتم ضبط مدل شبکه پویا را مقایسه کردیم و دریافتیم که میانگین زمان ضبط این الگوریتم به طور قابل توجهی کمتر از دو روش دیگر است. الگوریتم جذب شبکه پویا یک روش پردازش ضبط شی فضایی جدید است که میتواند عملکرد ضبط را بهبود بخشد و در عین حال پایداری و ویژگیهای دقیق ضبط را حفظ کند. این روش کارایی را بهبود می بخشد و زمان عملکرد برنامه هایی مانند جمع آوری داده های مکانی، طراحی داخلی و نقشه برداری موبایل را کاهش می دهد. بازخورد دقت کمتر از ۱۰ سانتیمتر است، زیرا دادهها را میتوان با موفقیت بدون حرکت زیاد بهدست آورد، و گرفتن بسیار بهتر از عدم ضبط است. ضبط زمان مورد نیاز را کاهش می دهد، در نتیجه خستگی را کاهش می دهد. علاوه بر این، تفاوت های قابل توجهی بین پارامترهای ARSnap وجود دارد که نشان می دهد ممکن است طیف گسترده ای از مقادیر مناسب وجود داشته باشد، به این معنی که توسعه دهندگان می توانند مقداری را انتخاب کنند که به بهترین وجه با نیازهای کاربر مطابقت دارد با توجه به مناطق مختلف مجموعه.
۵٫۲٫ کار آینده
علاوه بر دو روش تعامل طبیعی از طریق عملیات تعامل ژست صفحه نمایش کاربر و حرکت عملیات حرکت بدن دوربین، در آینده قصد داریم راه های دیگری را مطالعه کنیم که کاربران بتوانند به طور فعال محدودیت ها را انتخاب کنند. به عنوان مثال، کاربر باید بتواند یک محدودیت را با لمس آن انتخاب کند.
با توسعه فناوری هوش مصنوعی و فناوری محاسبات فضایی، پردازش زبان طبیعی و درک صحنه بینایی کامپیوتری نیز جهتگیریهای مهمی برای کار آینده است. به عنوان مثال، هنگامی که کاربر به جاده نزدیک می شود، سیستم جمع آوری داده های مکانی به طور خودکار خطوط جاده را در دو طرف خط محدود می کند. این نوع گرفتن از اشیاء فیزیکی هنوز یک زمینه تحقیقاتی باز است، یعنی استفاده از هوش مصنوعی و سایر فناوریها برای تراز کردن اشیاء فیزیکی با محدودیتهای فیزیکی در AR [ ۵۸ ]. کاربرد اطلاعات مکانی در این رابطه ممکن است نقشه برداری داخلی سیار و نقشه برداری سه بعدی واقعی باشد.
گرفتن معنایی در اطلاعات مکانی استفاده می شود. معمولاً وقتی در مورد snapping صحبت می کنیم، به طور پیش فرض از روابط هندسی محاسباتی snapped سه بعدی استفاده می کنیم. این ممکن است شامل نزدیکی هندسی در ترجمه یا چرخش، اهدافی که بر یکدیگر عمود یا موازی هستند یا دارای یک خط موازی مشترک هستند، همترازی با جهت/محور اصلی (مثلاً گرانش)، و همترازی با نقطه میانی باشد. با این حال، استفاده از روابط معنایی یکی دیگر از روش های ممکن برای snapping است [ ۳۸ ]. با این حال، این نیاز به درک معنایی دقیق از صحنه فیزیکی دارد و ما قصد داریم در آینده نیز در این زمینه تحقیقاتی انجام دهیم.
منابع
Azuma، RT A Survey of Augmented Reality. Presence Teleoperators Virtual Environ. ۱۹۹۷ ، ۶ ، ۳۵۵-۳۸۵٫ [ Google Scholar ] [ CrossRef ]
Chmelařová، K. شاسینکا، چ. Stachoň, Z. تجسم اطلاعات مرتبط با محیط در واقعیت افزوده: تجزیه و تحلیل نیازهای کاربر. در مجموعه مقالات کنفرانس بین المللی کارتوگرافی: پیشرفت در کارتوگرافی و علم GIS، واشنگتن، دی سی، ایالات متحده آمریکا، ۲ تا ۷ ژوئیه ۲۰۱۷؛ پترسون، نماینده مجلس، اد. Springer: هایدلبرگ، آلمان، ۲۰۱۷; صص ۲۸۳-۲۹۲٫ [ Google Scholar ]
چولتکین، ا. لوچهد، آی. مدن، م. کریستف، اس. دوو، ا. پتیت، سی. قفل، O.; شوکلا، س. هرمان، ال. استاچون، ز. و همکاران واقعیت بسط یافته در علوم فضایی: مروری بر چالش های پژوهشی و جهت گیری های آینده. ISPRS Int. J. Geo-Inform. ۲۰۲۰ ، ۹ ، ۴۳۹٫ [ Google Scholar ] [ CrossRef ]
اسلوکام، TA; بلوک، سی. جیانگ، بی. کوسولاکو، ا. مونتلو، DR; فورمن، اس. هدلی، مسائل شناختی و کاربردپذیری NR در تجسم جغرافیایی. کارتوگر. Geogr. Inf. علمی ۲۰۰۱ ، ۲۸ ، ۶۱-۷۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
لی، جی.ای. دانسر، ا. نسانی، ع. Billinghurst، M. AntarcticAR: تجربه واقعیت افزوده در فضای باز از یک تور مجازی به قطب جنوب. در مجموعه مقالات سمپوزیوم بین المللی IEEE در سال ۲۰۱۳ در مورد واقعیت ترکیبی و افزوده – هنر، رسانه و علوم انسانی (ISMAR-AMH)، آدلاید، SA، استرالیا، ۱ تا ۴ اکتبر ۲۰۱۳٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۳؛ ص ۲۹-۳۸٫ [ Google Scholar ]
لی، جی.ای. دانسر، ا. کیم، اس. Billinghurst, M. CityViewAR: یک برنامه کاربردی AR در فضای باز موبایل برای تجسم شهر. در مجموعه مقالات یازدهمین سمپوزیوم بین المللی IEEE در مورد واقعیت ترکیبی و افزوده ۲۰۱۲—مقالات هنر، رسانه و علوم انسانی، ISMAR-AMH 2012، آتلانتا، GA، ایالات متحده آمریکا، ۵-۸ نوامبر ۲۰۱۲; IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۲؛ صص ۵۷-۶۴٫ [ Google Scholar ]
کیم، دبلیو. کرل، ن. Gerke, M. Mobile واقعیت افزوده در حمایت از آسیب ساختمان و ارزیابی ایمنی. نات سیستم خطرات زمین. علمی ۲۰۱۶ ، ۱۶ ، ۲۸۷-۲۹۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
Aurelia, S. نمایش تصویر ماهوارهای Heightening از طریق واقعیت افزوده موبایل – یک مدل برنامهریزی پیشرفته. در تکنیک های هوش مصنوعی برای تجزیه و تحلیل تصاویر ماهواره ای ; Hemanth، DJ، Ed. انتشارات بین المللی Springer: Cham، سوئیس، ۲۰۲۰; صص ۱-۲۴٫ شابک ۹۷۸-۳-۰۳۰-۲۴۱۷۸-۰٫ [ Google Scholar ]
قیصری، م. گودمن، اس. اشمیت، جی. ویلیامز، جی. Irizarry, J. کاوش BIM و استفاده از واقعیت افزوده موبایل در مدیریت تسهیلات. در مجموعه مقالات کنگره تحقیقات ساخت و ساز ۲۰۱۴، آتلانتا، جورجیا، ۱۹-۲۱ مه ۲۰۱۴٫ Castro-Lacouture, D., Irizarry, J., Ashuri, B., Eds.; انجمن مهندسین عمران آمریکا: Reston، VA، ایالات متحده آمریکا، ۲۰۱۴; صفحات ۱۹۴۱-۱۹۵۰٫ [ Google Scholar ]
قیصری، م. فروغی سبزوار، م. چن، پی. Irizzary, J. یکپارچه سازی BIM و پانوراما برای ایجاد یک تجربه با واقعیت نیمه افزوده از یک سایت ساخت و ساز. بین المللی J. Constr. آموزش. Res. ۲۰۱۶ ، ۱۲ ، ۳۰۳-۳۱۶٫ [ Google Scholar ] [ CrossRef ]
چاتزوپولوس، دی. برمجو، سی. هوانگ، ز. Hui, P. Mobile Reality Survey: از جایی که هستیم تا جایی که می رویم. IEEE Access ۲۰۱۷ ، ۵ ، ۶۹۱۷–۶۹۵۰٫ [ Google Scholar ] [ CrossRef ]
Kerle، N. نقشه برداری آسیب پس از فاجعه مبتنی بر سنجش از دور با روش های مشارکتی. در سیستم های هوشمند برای مدیریت بحران. نکات سخنرانی در اطلاعات جغرافیایی و کارتوگرافی ; Springer: برلین/هایدلبرگ، آلمان، ۲۰۱۳; صص ۱۲۱-۱۳۳٫ ISBN 9783642332180. [ Google Scholar ]
زولمان، اس. شال، جی. Junghanns، S. Reitmayr, G. تجسم های قابل فهم و تعاملی داده های GIS در واقعیت افزوده. در مجموعه مقالات هشتمین سمپوزیوم بینالمللی در محاسبات بصری، ISVC 2012، پیشرفتها در محاسبات بصری، کرتا، یونان، ۱۶-۱۸ ژوئیه ۲۰۱۲; ببیس، جی.، بویل، آر.، پروین، بی.، کوراسین، دی.، فاولکس، سی، وانگ، اس.، چوی، ام.-اچ.، مانتلر، اس.، شولز، جی.، آسودو، D., et al., Eds. Springer: برلین/هایدلبرگ، آلمان، ۲۰۱۲; صص ۶۷۵-۶۸۵٫ [ Google Scholar ]
ویلیامز، جی. قیصری، م. چن، پی.-جی. Irizarry, J. BIM2MAR: ترجمه کارآمد BIM به برنامه های کاربردی واقعیت افزوده موبایل. جی. مناگ. مهندس ۲۰۱۵ ، ۳۱ . [ Google Scholar ] [ CrossRef ]
قیصری، م. Irizarry، J. بررسی الزامات انسانی و تکنولوژیکی برای اجرای موفقیت آمیز یک محیط واقعیت افزوده موبایل مبتنی بر BIM در شیوه های مدیریت تسهیلات. تسهیلات ۲۰۱۶ ، ۳۴ ، ۶۹-۸۴٫ [ Google Scholar ] [ CrossRef ]
شال، جی. زولمان، اس. Reitmayr, G. Smart Vidente: پیشرفت در واقعیت افزوده موبایل برای تجسم تعاملی زیرساخت های زیرزمینی. پارس محاسبات همه جا حاضر. ۲۰۱۳ ، ۱۷ ، ۱۵۳۳-۱۵۴۹٫ [ Google Scholar ] [ CrossRef ]
وانگ، جی. وانگ، ایکس. شو، دبلیو. Xu, B. ادغام BIM و واقعیت افزوده برای تجسم معماری تعاملی. ساخت و ساز نوآوری. ۲۰۱۴ ، ۱۴ ، ۴۵۳-۴۷۶٫ [ Google Scholar ] [ CrossRef ]
خدمات BIM: مدل سازی اطلاعات ساختمان. در دسترس آنلاین: https://soa-inc.com/how-we-work/bim-services/ (در ۳۰ دسامبر ۲۰۲۱ قابل دسترسی است).
فرنکوئیست، جی. کفاش، جی. Booth، KS “Oh Snap” – به کاربران کمک می کند اشیاء دیجیتال را در رابط های لمسی تراز کنند. در مجموعه مقالات تعامل انسان و کامپیوتر – INTERACT 2011، لیسبون، پرتغال، ۵-۹ سپتامبر ۲۰۱۱٫ Campos, P., Graham, N., Jorge, J., Nunes, N., Palanque, P., Winckler, M., Eds. Springer: برلین/هایدلبرگ، آلمان، ۲۰۱۱; صص ۳۳۸-۳۵۵٫ [ Google Scholar ]
بودوئن لافون، م. Mackay، WE Reification، چند شکلی و استفاده مجدد: سه اصل برای طراحی رابط های بصری. در مجموعه مقالات کنفرانس کاری در رابط های بصری پیشرفته-AVI ’00، پالرمو، ایتالیا، ۲۳-۲۶ مه ۲۰۰۰٫ ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۰۰; صص ۱۰۲-۱۰۹٫ [ Google Scholar ]
Bier, EA Snap-dragging در سه بعدی. محاسبات ACM SIGGRAPH. نمودار. ۱۹۹۰ ، ۲۴ ، ۱۹۳-۲۰۴٫ [ Google Scholar ] [ CrossRef ]
بیر، EA؛ Stone, MC Snap-dragging. در مجموعه مقالات سیزدهمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی-SIGGRAPH ’86، دالاس، TX، ایالات متحده آمریکا، ۱۸-۲۲ اوت ۱۹۸۶; ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، ۱۹۸۶; صص ۲۳۳-۲۴۰٫ [ Google Scholar ]
هسو، سی. Alt، G. هوانگ، ز. بییر، ای. Bruederlin، B. مجموعه ابزار دستکاری مبتنی بر محدودیت برای ویرایش اشیاء سه بعدی. در مجموعه مقالات سمپوزیوم در مدلسازی جامد و کاربردها، آتلانتا، GA، ایالات متحده آمریکا، ۱۴-۱۶ مه ۱۹۹۷; ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، ۱۹۹۷; صص ۱۶۸-۱۸۰٫ [ Google Scholar ]
دو، سی. چن، Y.-L. بله، م. تقویت عمق مبتنی بر Snapping Edge Ren، L. برای مدیریت انسداد دینامیک در واقعیت افزوده. در مجموعه مقالات سمپوزیوم بین المللی IEEE 2016 در مورد واقعیت ترکیبی و افزوده (ISMAR)، مریدا، مکزیک، ۱۹ تا ۲۳ سپتامبر ۲۰۱۶؛ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۶؛ صص ۵۴-۶۲٫ [ Google Scholar ]
بودیش، پ. کاترل، ای. هینکلی، ک. Eversole، A. Snap-and-Go: کمک به کاربران برای تراز کردن اشیاء بدون استفاده از روش سنتی Snapping. در مجموعه مقالات کنفرانس SIGCHI در مورد عوامل انسانی در سیستم های محاسباتی، پورتلند، OR، ایالات متحده آمریکا، ۲-۷ آوریل ۲۰۰۵٫ ACM: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۰۵; صص ۳۰۱-۳۱۰٫ [ Google Scholar ]
لی، ی. لو، ایکس. ژنگ، ی. خو، پی. Fu, H. SweepCanvas: نمونه سازی سه بعدی مبتنی بر طرح روی یک تصویر RGB-D. در مجموعه مقالات سی امین سمپوزیوم سالانه ACM در نرم افزار و فناوری رابط کاربری، UIST 2017، شهر کبک، QC، کانادا، ۲۲ تا ۲۵ اکتبر ۲۰۱۷؛ ACM: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۱۷؛ صص ۳۸۷-۳۹۹٫ [ Google Scholar ]
گایگر، پی. شیکلر، ام. پریس، آر. شوبل، جی. Reichert، M. برنامه های کاربردی واقعیت افزوده موبایل مبتنی بر مکان: چالش ها، مثال ها، درس های آموخته شده. در مجموعه مقالات دهمین کنفرانس بینالمللی سیستمهای اطلاعات وب و فناوریها — جلد ۱: کارشناسی، (WEBIST 2014)، بارسلون، اسپانیا، ۳ تا ۵ آوریل ۲۰۱۴٫ SCITEPRESS- انتشارات علم و فناوری: ستوبال، پرتغال، ۲۰۱۴; جلد ۱، ص ۳۸۳–۳۹۴٫ [ Google Scholar ]
انجام دهید، تلویزیون؛ لی، J.-W. یک الگوریتم سریع برای گرفتن اشیاء سه بعدی در واقعیت افزوده. در مجموعه مقالات سمپوزیوم بین المللی ۲۰۰۹ در مورد واقعیت مجازی همه جا حاضر، گوانگجو، کره، ۸ تا ۱۱ ژوئیه ۲۰۰۹٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۰۹؛ صص ۶۱-۶۳٫ [ Google Scholar ]
هوانگ، ک. وانگ، سی. وانگ، اس. لیو، آر. چن، جی. Li, X. یک چارچوب رندر نقشه کارآمد و مستقل از پلتفرم برای واقعیت افزوده موبایل. ISPRS Int. J. Geo-Inform. ۲۰۲۱ ، ۱۰ ، ۵۹۳٫ [ Google Scholar ] [ CrossRef ]
Bier، طراحی هندسی تعاملی Snap-Dragging EA در دو و سه بعدی . دانشگاه کالیفرنیا: برکلی، کالیفرنیا، ایالات متحده آمریکا، ۱۹۸۸٫ [ Google Scholar ]
اوه، J.-Y. استورزلینگر، دبلیو. Danahy، J. SESAME: به سوی سیستم های طراحی مفهومی سه بعدی بهتر. در مجموعه مقالات ششمین کنفرانس طراحی سیستم های تعاملی، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، ۲۳ تا ۲۸ ژوئن ۲۰۱۹؛ ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۰۶; ص ۸۰-۸۹٫ [ Google Scholar ]
لی، جی. یانگ، یو. کیم، ی. جو، دی. Kim, K. Snap-to-Feature Interface برای حاشیه نویسی در واقعیت افزوده موبایل پیشرفت در پلتفرم های محاسباتی موبایل. در مجموعه مقالات کارگاه ابر مدل های واقعیت افزوده در نهمین سمپوزیوم بین المللی IEEE در مورد واقعیت ترکیبی و افزوده (ISMAR ’10)، سئول، کره، ۱۳ تا ۱۶ اکتبر ۲۰۱۰٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۰؛ صص ۱-۲۴٫ [ Google Scholar ]
سوامیناتان، آر. شلیچر، آر. بورکارد، اس. آگورتو، آر. Koleczko، S. اندازه گیری شاد: واقعیت افزوده برای مبلمان مجازی موبایل. بین المللی جی. موب. هوم محاسبه کنید. تعامل داشتن. ۲۰۱۳ ، ۵ ، ۱۶-۴۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
Kwan، KC; Fu, H. Mobi3DSketch: 3D Sketching in Mobile AR. در مجموعه مقالات کنفرانس CHI 2019 در مورد عوامل انسانی در سیستمهای محاسباتی، گلاسکو، بریتانیا، ۴ تا ۹ مه ۲۰۱۹؛ ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۱۹؛ صص ۱-۱۱٫ [ Google Scholar ]
نیوکمب، RA؛ فیتزگیبون، ا. ایزدی، س. هیلیگز، او. مولینو، دی. کیم، دی. دیویسون، ای جی؛ کوهی، پ. شاتون، جی. Hodges, S. KinectFusion: نقشه برداری و ردیابی سطح متراکم در زمان واقعی. در مجموعه مقالات دهمین سمپوزیوم بین المللی IEEE در سال ۲۰۱۱ در مورد واقعیت ترکیبی و افزوده، بازل، سوئیس، ۲۶ تا ۲۹ اکتبر ۲۰۱۱٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۱؛ صص ۱۲۷-۱۳۶٫ [ Google Scholar ]
نورنبرگر، بی. اوفک، ای. بنکو، اچ. ویلسون، AD SnapToReality: تراز کردن واقعیت افزوده با دنیای واقعی. در مجموعه مقالات کنفرانس CHI 2016 در مورد عوامل انسانی در سیستم های محاسباتی، سان خوزه، کالیفرنیا، ایالات متحده آمریکا، ۷ تا ۱۲ مه ۲۰۱۶؛ ACM: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۱۶؛ ص ۱۲۳۳-۱۲۴۴٫ [ Google Scholar ]
آلبینسون، PA; ژای، اس. تعامل با صفحه لمسی با دقت بالا. Conf. هوم محاسبه عوامل Syst.-Proc. ۲۰۰۳ ، ۱۰۵-۱۱۲٫ [ Google Scholar ] [ CrossRef ]
وو، ST; آبرانتس، ام. توست، دی. Batagelo، HC چیدن و گیرکردن برای دستگاه های ورودی سه بعدی. علامت برزیلی محاسبه کنید. نمودار. فرآیند تصویر ۲۰۰۳ ، ۱۴۰-۱۴۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
Viewports و Clipping (Direct3D 9)—Win32 Apps|Microsoft Docs. در دسترس آنلاین: https://docs.microsoft.com/en-us/windows/win32/direct3d9/viewports-and-clipping (در ۱۸ دسامبر ۲۰۲۱ قابل دسترسی است).
Hoang، TN; توماس، BH تکنیکهای اصلاح درجا برای مدلهای ارجاعشده جغرافیایی در فضای باز با استفاده از AR موبایل. در مجموعه مقالات هشتمین سمپوزیوم بین المللی IEEE در سال ۲۰۰۹ در مورد واقعیت ترکیبی و افزوده، اورلاندو، فلوریدا، ایالات متحده آمریکا، ۱۹ تا ۲۲ اکتبر ۲۰۰۹٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۰۹؛ صص ۱۹۳-۱۹۴٫ [ Google Scholar ]
نورنبرگر، بی. اوفک، ای. بنکو، اچ. ویلسون، AD SnapToReality: همراستایی واقعیت افزوده با دنیای واقعی. Conf. هوم محاسبه عوامل Syst.-Proc. ۱۲۴۴٫ [ Google Scholar ] [ CrossRef ]
فابری، ع. Pion, S. CGAL: The Computational Geometry Algorithms Library. در مجموعه مقالات هفدهمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، سیاتل، WA، ایالات متحده آمریکا، ۴-۶ نوامبر ۲۰۰۹٫ ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۰۹; صص ۵۳۸-۵۳۹٫ [ Google Scholar ]
پانو، سی. راگیا، ل. دیملی، دی. مانیا، ک. معماری برای موبایل در فضای باز واقعیت افزوده برای میراث فرهنگی. ISPRS Int. J. Geo-Inform. ۲۰۱۸ ، ۷ ، ۴۶۳٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
او، تی. Gan, J. روشی جدید برای حذف نویز نمک و فلفل بر اساس مدل سیستم خاکستری در تصاویر. در مجموعه مقالات کنفرانس بین المللی IEEE 2010 در مورد محاسبات هوشمند و سیستم های هوشمند، Xiamen، چین، ۲۹-۳۱ اکتبر ۲۰۱۰٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۰؛ جلد ۱، ص ۵۷۴–۵۷۶٫ [ Google Scholar ]
کلینگ، ن. محمد یوسف، من. لته، ح. Ujang، U. ساختار داده Octree کامپیوتری بسیار کارآمد و جستجوی همسایگان در GIS سه بعدی. در پیشرفت در ژئو اطلاعات سه بعدی ; عبدالرحمن، ع.، ویرایش; انتشارات بین المللی اسپرینگر: چم، سوئیس، ۲۰۱۷; صص ۲۸۵-۳۰۳٫ شابک ۹۷۸-۳-۳۱۹-۲۵۶۹۱-۷٫ [ Google Scholar ]
فاصله از یک نقطه تا یک هواپیما. در دسترس آنلاین: https://en.wikipedia.org/wiki/Distance_from_a_point_to_a_plane (در ۱ ژانویه ۲۰۲۲ قابل دسترسی است).
گو، ام. هان، سی. گوان، کیو. هوانگ، ی. Xie, Z. یک رویکرد زمانبندی موازی جهانی برای تجزیه و تحلیل بافر دادههای برداری چند خطی و چندضلعی در سیستمعاملهای GIS معمولی. ترانس. GIS ۲۰۲۰ ، ۲۴ ، ۱۶۳۰-۱۶۵۴٫ [ Google Scholar ] [ CrossRef ]
هوانگ، ک. زو، ی. لی، اس. ژونگ، ای. آهنگ، جی. لیو، ی. الگوریتم اکتساب هدف فضایی بر اساس مدل شبکه پویا. ژئوماتیک اسپات. Inf. تکنولوژی ۲۰۱۸ ، ۴۱ ، ۶۵-۶۷، (به زبان چینی با چکیده انگلیسی). [ Google Scholar ] [ CrossRef ]
یوکان، ال. بو، اس. تیاندینگ، اچ. Baisheng, Y. روش ویرایش تعاملی GIS 3D: تحقیق و کاربرد در یخچالشناسی. در مجموعه مقالات دومین کنفرانس بین المللی علوم و مهندسی اطلاعات، هانگژو، چین، ۴ تا ۶ دسامبر ۲۰۱۰٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۰؛ صص ۳۳۸۴–۳۳۸۷٫ [ Google Scholar ]
ژانگ، Z. کالیبراسیون دوربین. در کامپیوتر ویژن ؛ Springer: Boston, MA, USA, 2014; صص ۷۶-۷۷٫ [ Google Scholar ]
راهنمای نهایی برای درک فناوری واقعیت افزوده (AR). در دسترس آنلاین: https://www.realitytechnologies.com/augmented-reality/ (دسترسی در ۳۰ دسامبر ۲۰۲۱).
برنامه خط کش — اندازه گیری نوار دوربین توسط گریمالا. در دسترس آنلاین: https://appgrooves.com/app/ruler-app-photo-ruler-by-grymala-ltd (در ۳۰ دسامبر ۲۰۲۱ قابل دسترسی است).
شرکای نرم افزار ابزار اندازه گیری بوش. در دسترس آنلاین: https://pt-pro.resource.bosch.com/media/glm-50-c-100038368-preview-pdf-276075.pdf (در ۳۰ دسامبر ۲۰۲۱ قابل دسترسی است).
Saar, O. RoomMapperAR یک نقشهبردار اتاق واقعیت افزوده موبایل. پایان نامه لیسانس، دانشگاه تارتو، تارتو، استونی، ۵ اکتبر ۲۰۱۹٫ [ Google Scholar ]
نواچی، پ. Woda, M. قابلیت های پلتفرم های ARCore و ARKit برای برنامه های AR/VR. Adv. هوشمند سیستم محاسبه کنید. ۲۰۲۰ ، ۹۸۷ ، ۳۵۸-۳۷۰٫ [ Google Scholar ] [ CrossRef ]
لی، GA; Billinghurst، M. مطالعه کاربر در مورد روش تعامل Snap-To-Feature. در مجموعه مقالات دهمین سمپوزیوم بین المللی IEEE در سال ۲۰۱۱ در مورد واقعیت ترکیبی و افزوده، بازل، سوئیس، ۲۶ تا ۲۹ اکتبر ۲۰۱۱٫ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، ۲۰۱۱؛ ص ۲۴۵-۲۴۶٫ [ Google Scholar ]
شکل ۱٫ معماری سیستم الگوریتم Snapping (ARSnap).
شکل ۲٫ خط لوله مدل سازی سه بعدی دقیق در MAR.
شکل ۳٫ فرآیند محاسبه نقطه تقاطع بین صفحه p و پرتو r.
شکل ۴٫ مدل octree تطبیقی.
شکل ۵٫ نتایج عکسبرداری بیدرنگ از موقعیتهای شش درجه آزادی (۶-DOF) دوربین در سطوح مختلف عمودی: ( الف ) نقاط برونتابی ۶-DOF در صفحه عمودی a. ( ب ) نقاط برآمدگی ۶-DOF در صفحه عمودی b. ( ج ) نقاط برآمدگی ۶-DOF در صفحه عمودی c.
شکل ۶٫ نتایج ضبط در زمان واقعی اطلاعات نشانگر مجازی از دیدگاه های مختلف: ( الف ) نتیجه گرفتن از یک چشم انداز بالا به پایین. ( ب ) نتیجه گرفتن از یک چشم انداز مربعی. ( ج ) نتیجه گرفتن از نمای رو به بالا است.
شکل ۷٫ فرآیند ثبت ارتفاع مجازی بین نقطه اتصال و هر صفحه سه بعدی در فضا.
شکل ۸٫ ترکیبی از نوار نشانگر و دایره زمین برای مقابله با گیرکردن نتایج در فواصل مختلف که محدودیتهای بصری را تحمیل میکند: ( الف ) عکسبرداری از نمای نزدیک از محوطه اداری. ( ب ) نتیجه گرفتن از نمای نزدیک از اتاق کنفرانس. ( ج ) برداشتن فضای اداری از راه دور. ( د ) برداشتن دوربرد اتاق کنفرانس.
شکل ۹٫ مدل snapping AR بر اساس تجزیه تطبیقی.
شکل ۱۰٫ مدلسازی نمای بصری ساختمانها در ARSnap: ( الف ) نمایش نتایج ضربهای خط ارتفاعی صحنه واقعی، ( ب ) نمایش نتایج ضربهای بردار صحنه مجازی. ( ج ) نمایش نتایج ضربه محکم و ناگهانی مبل نامنظم. (د) نمایش نتایج فوری هواپیما از صحنه واقعی. ( ه ) نمایش نتایج ضربه محکم و ناگهانی دیوار صحنه مجازی. ( f ) نتایج ضربه محکم و ناگهانی ماشین فروش معمولی را نمایش می دهد.
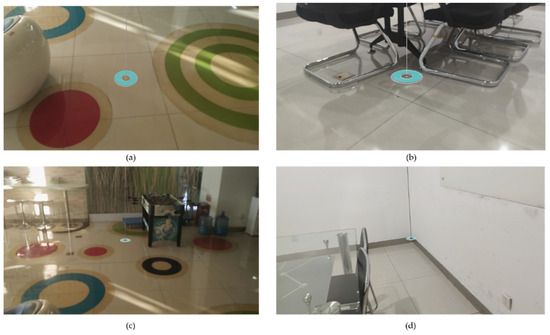
شکل ۱۱٫ گرفتن نقاط در صفحه ۳ بعدی مشخص شده: ( الف ) ضربه زدن به یک نقطه در صفحه سه بعدی (فاصله کوتاه). ( ب ) ضربه زدن به نقطه ای در یک صفحه سه بعدی (فاصله دور).
شکل ۱۲٫ گرفتن خطوط توسعه یافته و خطوط افقی در فضای سه بعدی: ( الف ) قبل از کشیدن خطوط توسعه یافته. ( ب ) پس از بستن خطوط توسعه یافته؛ ( ج ) قبل از کشیدن خطوط افقی. ( د ) پس از شکستن خطوط افقی.
شکل ۱۳٫ گرفتن گره های هندسی در فضای ۳ بعدی: ( الف ) گره هندسه سه بعدی قبل از snapping. ( ب ) گره های هندسه سه بعدی در گیر کردن. ( ج ) گره هندسه ۳ بعدی پس از ضربه زدن.
شکل ۱۴٫ تصویربرداری از درها و پنجره های داخلی ساختمان بر اساس محدودیت های معنایی ۳D-GIS: ( الف ) snapping دروازه بر اساس معنای ۳D-GIS. ( ب ) نتیجه شکستن دروازه، ( ج ) بستن پنجره بر اساس معناشناسی ۳D-GIS. ( د ) نتیجه شکستن پنجره.
شکل ۱۵٫ نتایج مقایسه کنار هم از همان ساختمان: ( الف ) RoomScan; ( ب ) ARSnap; ( C ) ARPlan3D; ( D ) Magic Plan.
شکل ۱۶٫ نتایج مدلسازی مدل سهبعدی داخلی بهدستآمده بر اساس ARSnap در وحدت: ( الف ) نتایج مدلسازی پس از گرفتن مدل داخلی طبقه اول. ( ب ) نتایج مدلسازی پس از گرفتن مدل داخلی طبقه دوم. ( ج ) جزئیات نتایج مدلسازی مدل داخلی در طبقه اول. ( د ) جزئیات نتایج مدلسازی مدل داخلی در طبقه دوم.