کلید واژه ها:
تشخیص تغییر ساختمان ; الگوریتم های تطبیق ; داده های برداری ; رد پا ؛ انحراف موقعیت
۱٫ مقدمه
۱٫۱٫ انگیزه
۱٫۲٫ هدف مطالعه
-
سوال تحقیق ۱ (RQ1): چه دقت و آستانه ای را می توان برای رویه های تطبیق CAR ، CBR ، HDD ، PoLiS و IBR برای تمایز بین ساختمان های اصلاح شده و جایگزین شده در هنگام تشخیص تغییرات در ردپای ساختمان انتظار داشت؟ در مورد CAR ، CBR و IBR ، انتظار داریم آستانه هایی بین ۵۰ تا ۷۰ درصد بر اساس مفروضات روتزینگر [ ۳۸ ] باشد.
-
سوال تحقیق ۲ (RQ2): هنگام تمایز بین ساختمان های تغییر یافته و جایگزین شده، آیا تابع حداقل برای معیارهای HDD و PoLiS مناسب تر از تابع حداکثر است ؟ از آنجایی که به هر حال ساختمانهای اصلاحشده به خوبی با هم مطابقت ندارند، بسته به میزان اصلاح، فرض میکنیم که یک تابع حداقلی برای تمایز بین ساختمانهای اصلاحشده و جایگزین شده بهتر است.
-
سوال تحقیق ۳ (RQ3): چگونه انحراف موقعیت بر دقت تأثیر می گذارد؟ ما فرض میکنیم که رویههای تطبیق CBR و IBR به احتمال زیاد نتایج نادرستی برای انحرافات موقعیت بزرگتر ایجاد میکنند، زیرا مقادیر تحمل این روشها اغلب منجر به عدم تطابق میشوند.
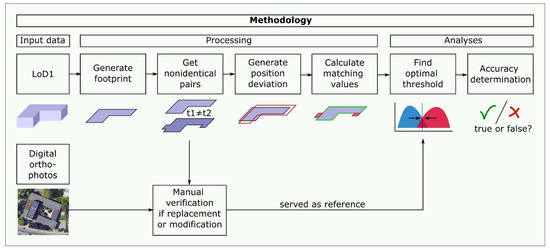
۲٫ مواد و روشها
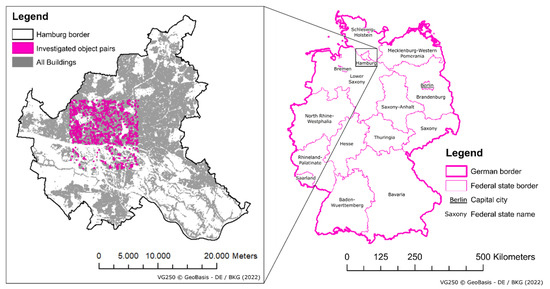
۲٫۱٫ مطالعه موردی و داده های ورودی
۲٫۲٫ انواع تغییرات ساختمانی
۲٫۳٫ رویه های تطبیق
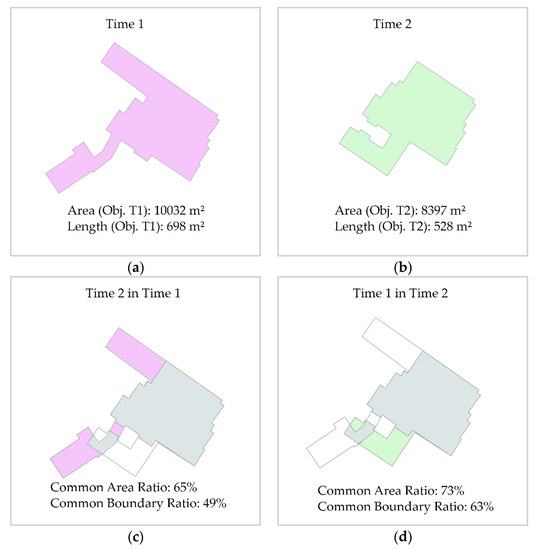
۲٫۳٫۱٫ نسبت مساحت مشترک ( CAR )
در مطالعات قبلی، جفت اشیایی که باید مورد بررسی قرار گیرند، اغلب در یک پیش فرآیند، بر اساس میزان همپوشانی، شناسایی می شدند تا در مراحل بعدی عمیق تر بررسی شوند [ ۳۴ ، ۳۵ ، ۴۱ ]. برای این منظور برای هر جفت شی نسبت همپوشانی مربوطه محاسبه می شود و مقدار پایین تر از این دو مقدار انتخاب می شود:
جایی که نواحی اشیاء در اولین مجموعه داده هستند و آن دومی تقاطع هر دو به صورت نشان داده می شود . در مورد m:n (بسیار تا زیاد) تغییرات، یا همچنین می تواند از مجموعه ای از نواحی چند شیء تشکیل شده باشد (< >). در این مورد، بررسی کردیم که آیا چند ضلعی های حل شده دارای درجه تطابق بالاتری هستند و سپس مقدار تطابق بهتر را انتخاب کردیم. محدوده مقادیر از ۰ تا ۱ است که ۰ مربوط به عدم تطابق (۰%) و ۱ به تطابق کامل (۱۰۰%) است. تابع حداکثر در اینجا توصیه نمی شود، زیرا مقدار ۱۰۰٪ فقط نشان می دهد که یک سطح در سطح دیگر قرار دارد.
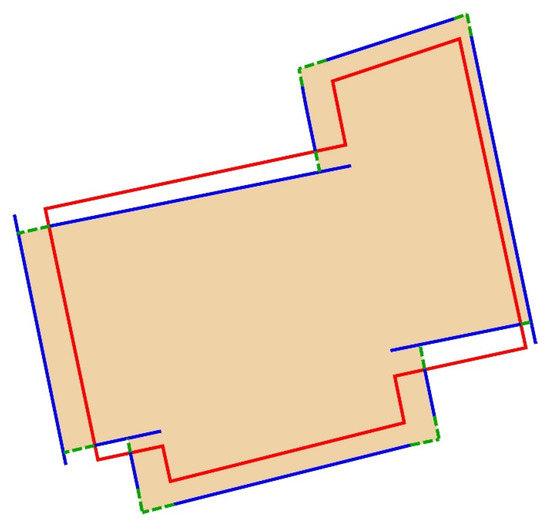
۲٫۳٫۲٫ نسبت مرز مشترک ( CBR )
مشابه CAR ، درجه تطبیق خطوط چند ضلعی ( ) را می توان برای هر جفت شی ارزیابی کرد. در اینجا بخش ها در هر دو نقطه از زمان بررسی می شوند تا مشخص شود که آیا آنها در یک محدوده تحمل معین منطبق هستند یا خیر ( ). برای انجام این کار، بخشهای اشیاء اولین نقطه زمانی با بخشهای بافر قطع میشوند. ) از نقطه زمانی دوم و بالعکس. در مجموعه داده های قدیمی، ساختمان ها اغلب به اشتباه شامل گاراژها، زیرگذرهای دراز یا روگذر بودند، که منجر به نتایج تطبیق ضعیفی شد، حتی زمانی که منطقه همپوشانی همان ساختمان را توصیف می کرد. در مقایسه با CAR ، بهتر است یک تابع حداکثر تعیین شود، زیرا تابع حداکثر مقادیر بالاتری را در صورت تغییرات یا اصلاح داده ها ارائه می دهد:
جایی که خطوط چند ضلعی در اولین مجموعه داده و آن دومی آن بخشهای خطی از مجموعه داده اول که در بخشهای بافر مجموعه داده دوم قرار دارند، به شرح زیر هستند و بالعکس. آنها بخش هایی را نشان می دهند که با یکدیگر مطابقت دارند. علاوه بر این، در مورد m:n تغییرات، یا می تواند شامل مجموعه ای از خطوط چند شیء (< >). در این مورد باید از قطعات چند ضلعی های حل شده استفاده شود. باز هم، محدوده مقادیر از ۰ تا ۱ است، که در آن ۰ مربوط به عدم تطابق (۰٪) و ۱ به یک جفت شی کاملا منطبق (۱۰۰٪) است. نمونه هایی از CAR و CBR در شکل ۳ نشان داده شده است.
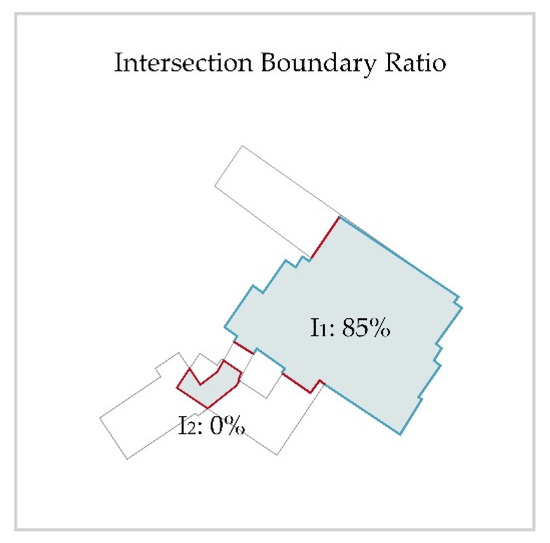
۲٫۳٫۳٫ نسبت مرز تقاطع ( IBR )
برای این منظور، ما تجزیه و تحلیل CBR را گسترش داده ایم تا مناطق تقاطع را به صورت جداگانه در نظر بگیریم. هر چند ضلعی تقاطع ( ) بررسی می شود تا مشخص شود کدام یک از بخش های آن ( ) با خطوط کلی هر دو شی اصلی مطابقت دارد ( و ). برای اینکه بتوان انحرافات موقعیت را در نظر گرفت، بافر نیز در اینجا به عنوان محدوده تحمل اعمال می شود ( ):
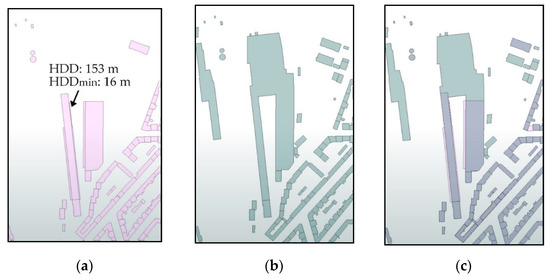
۲٫۳٫۴٫ فاصله هاسدورف ( HDD )
فاصله Hausdorff در بسیاری از کاربردها که تعداد نقاط در دو مجموعه داده شده استفاده می شود برابر نیست، و بنابراین هیچ مکاتبه ای داده نمی شود. برای هر جفت از اشیاء، چند ضلعی از اولین شی است و چند ضلعی از جسم دوم اشاره می کند به عنوان یک مجموعه داده شده در نظر گرفته می شوند. فاصله هاسدورف جهتدار بین A و B، مجموع این مجموعههای نقطهای را توصیف میکند که بزرگترین فاصله بین نقاط A و نزدیکترین نقطه B است:
حداکثر دو سوپرما ( ) فاصله هاسدورف است که حداقل در مفهوم ریاضی یک متریک است، زیرا قطعیت مثبت، تقارن و نابرابری مثلث را برآورده می کند (برای جزئیات بیشتر به [ ۳۹ ] مراجعه کنید):
از آنجایی که در مورد ما میخواستیم بدانیم آیا جفت شی همان ساختمان را توصیف میکند، تابع حداقل را نیز بررسی کردیم. با این کار، ما میخواستیم بررسی کنیم که آیا میتوان با ساختمانهای اصلاحشده به نتایج بهتری دست یافت (به عنوان مثال، در صورت حذف روگذرها):
۲٫۳٫۵٫ چند ضلعی و بخش های خط ( PoLiS )
PoLiS هدایت شده میانگین فاصله هر نقطه از یک چند ضلعی A را توصیف می کند ( ) به رئوس (یا نقاط) یک چند ضلعی دیگر B ( ) در هر جفت شی (برای جزئیات بیشتر به [ ۱۴ ] مراجعه کنید):
مجموع وزنی دو پارامتر جهت دار ( ) برای به دست آوردن یک متریک متقارن و مشابه استفاده می شود:
جایی که و برای عادی سازی تعداد نابرابر توزیع شده نقاط اشیاء A و B برای به دست آوردن میانگین وزنی استفاده می شود. مانند HDD ، حداقل ۰ متر است، و حداکثر از عریض ترین ساختمان در مجموعه داده بزرگتر نیست. یکی از مزایای HDD و PoLiS این است که هیچ پارامتر اضافی مانند محدوده تحمل ( مانند CBR و IBR .
دوباره، میخواهیم بررسی کنیم که آیا مقدار پایینتر پارامترهای هدایتشده برای تمایز بهتر بین تغییرات و ساختارهای جایگزین مناسبتر است یا خیر:
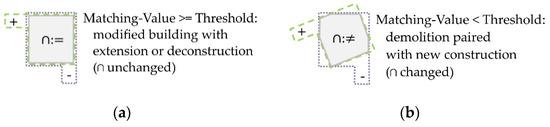
۲٫۴٫ تعیین آستانه و خطا
۲٫۴٫۱٫ آستانه بهینه
۲٫۴٫۲٫ کل خطا
خطای کل با مرتبط کردن نسبت مساحت ساختمانی که به طور نادرست تعیین شده به مساحت کل ساختمان ها تعیین شد:
۲٫۴٫۳٫ خطای کاربر
خطای کاربر با مرتبط کردن مساحت تغییرات تعیین شده توسط روش تطبیق به مساحت ساختمانهای نادرست تعیین شده تعیین شد:
۲٫۴٫۴٫ خطای سازنده
خطای تولیدکننده با مرتبط کردن ناحیه تغییرات مرجع به مساحت ساختمانهای نادرست تعیین شده تعیین شد:
۲٫۵٫ ایجاد انحرافات موقعیت
۳٫ نتایج
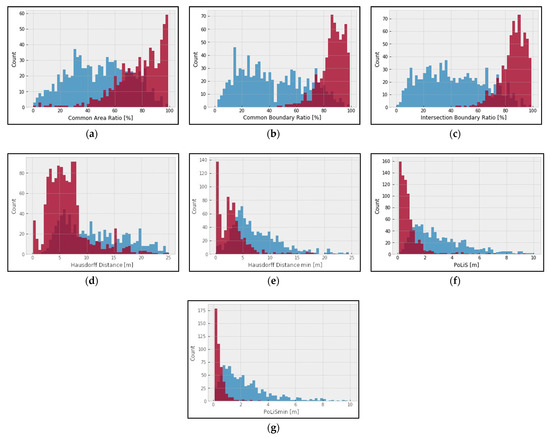
۳٫۱٫ توزیع ها
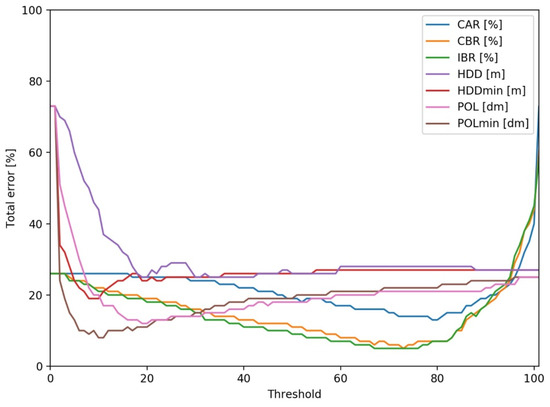
۳٫۲٫ آستانه ها و دقت های بهینه
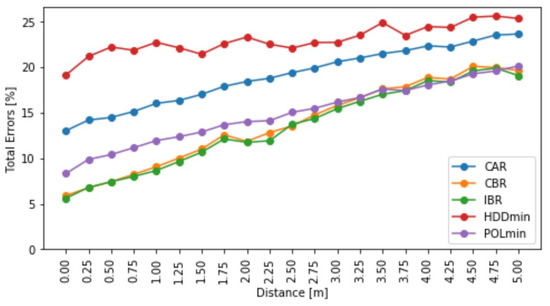
۳٫۳٫ آستانه و دقت انحرافات ایجاد شده
۴٫ بحث
۵٫ نتیجه گیری ها
منابع
- بیلجکی، اف. استوتر، جی. لدوکس، اچ. زلاتانوا، اس. Çöltekin، A. کاربردهای مدل های سه بعدی شهر: بررسی وضعیت هنر. ISPRS Int. J. Geo-Inf. ۲۰۱۵ ، ۴ ، ۲۸۴۲-۲۸۸۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ایوانز، اس. لیدیارد، آر. Steadman، P. 3DStock: نوع جدیدی از مدل سه بعدی ساختمان سهام انگلستان و ولز، برای استفاده در تجزیه و تحلیل انرژی. محیط زیست طرح. ب مقعد شهری. علوم شهر ۲۰۱۷ ، ۴۴ ، ۲۲۷-۲۵۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Vanderhaegen، S. Canters، F. نقشه برداری شکل شهری و عملکرد در سطح بلوک شهر با استفاده از متریک های فضایی. Landsc. طرح شهری. ۲۰۱۷ ، ۱۶۷ ، ۳۹۹-۴۰۹٫ [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. اوهوری، کالیفرنیا؛ لدوکس، اچ. پیترز، آر. Stoter, J. برآورد جمعیت با استفاده از مدل شهر سه بعدی: یک مطالعه چند مقیاسی در سطح کشور در هلند. PLoS ONE ۲۰۱۶ , ۱۱ , e0156808. [ Google Scholar ] [ CrossRef ]
- برویتمن، دی. کومن، ای. جاذبه هسته های شهری: متراکم شدن در مراکز شهر هلند. مطالعه شهری. ۲۰۲۰ ، ۵۷ ، ۱۹۲۰-۱۹۳۹٫ [ Google Scholar ] [ CrossRef ]
- هچت، ر. هرولد، اچ. بهنیش، م. Jehling، M. نقشه برداری از پویایی بلندمدت جمعیت و مسکن بر اساس تجزیه و تحلیل چند زمانی مورفولوژی های شهری. ISPRS Int. J. Geo-Inf. ۲۰۱۹ ، ۸ ، ۲٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- خانال، ن. اودین، ک. متین، MA; Tenneson، K. تشخیص خودکار الگوهای گسترش شهری فضایی و زمانی با ترکیب داده های OSM و Landsat در کاتماندو. Remote Sens. ۲۰۱۹ , ۱۱ , ۲۲۹۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- غمیسی، پ. راستی، ب. یوکویا، ن. وانگ، کیو. هوفل، بی. بروزون، ال. بوولو، اف. چی، م. اندرس، ک. گلوگوئن، آر. و همکاران ترکیب دادههای چندمنبعی و چندزمانی در سنجش از راه دور: مروری جامع بر وضعیت هنر. IEEE Geosci. سنسور از راه دور Mag. ۲۰۱۹ ، ۷ ، ۶-۳۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دای، سی. ژانگ، ز. Lin, D. یک روش دو جهته مبتنی بر شی برای استخراج ساختمان یکپارچه و تشخیص تغییر بین ابرهای نقطه چندوجهی. Remote Sens. ۲۰۲۰ , ۱۲ , ۱۶۸۰٫ [ Google Scholar ] [ CrossRef ]
- سستر، ام. Brenner, C. Datenquellen Und Methoden Für Eine Automatische Bestimmung von Gebäude- Und Siedlungsvolumen ; موسسه کارتوگرافی و ژئوانفورماتیک – دانشگاه لایبنیتس هانوفر: هانوفر، آلمان، ۲۰۰۲٫ [ Google Scholar ]
- ماتیکاینن، ال. Hyyppä، J.; آهوکاس، ای. مارکلین، ال. کارتینن، اچ. تشخیص خودکار ساختمان ها و تغییرات در ساختمان ها برای به روز رسانی نقشه ها. Remote Sens. ۲۰۱۰ , ۲ , ۱۲۱۷-۱۲۴۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جباری، س. Zhang, Y. تشخیص تغییر ساختمان با استفاده از چند سنسور و تصاویر با زاویه دید چندگانه. IOP Conf. سر. محیط زمین. علمی ۲۰۱۶ , ۳۴ , ۰۱۲۰۱۸٫ [ Google Scholar ] [ CrossRef ]
- Gergelova، MB; لبانت، اس. کوزوویچ، اس. کوزوویکووا، ز. Pavolova، H. شناسایی سطوح سقف از نقاط ابری LiDAR توسط ابزار GIS: مطالعه موردی Lučenec، اسلواکی. پایداری ۲۰۲۰ ، ۱۲ ، ۶۸۴۷٫ [ Google Scholar ] [ CrossRef ]
- آوبلج، ج. مولر، آر. Bamler, R. A Metric for Polygon Comparison and Building Extraction Evaluation. IEEE Geosci. سنسور از راه دور Lett. ۲۰۱۵ ، ۱۲ ، ۱۷۰-۱۷۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فو، ز. فن، ال. یو، ز. ژو، ک. اندازهگیری تشابه شکل مبتنی بر لحظه برای موجودیتهای مساحتی در دادههای برداری جغرافیایی. ISPRS Int. J. Geo-Inf. ۲۰۱۸ ، ۷ ، ۲۰۸٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- روتنشتاینر، اف. سون، جی. گرکه، ام. Wegner، JD; Breitkopf، U. Jung, J. نتایج معیار ISPRS در تشخیص اشیاء شهری و بازسازی ساختمان سه بعدی. ISPRS J. Photogramm. Remote Sens. ۲۰۱۴ ، ۹۳ ، ۲۵۶-۲۷۱٫ [ Google Scholar ] [ CrossRef ]
- وو، جی. وان، ی. چیانگ، ی. فو، ز. دنگ، ام. الگوریتم تطبیقی بر اساس نمودار ورونوی برای مناطق مسکونی چند ضلعی چند مقیاسی. دسترسی IEEE ۲۰۱۸ ، ۶ ، ۴۹۰۴–۴۹۱۵٫ [ Google Scholar ] [ CrossRef ]
- یانگ، م. آی، تی. یان، ایکس. چن، ی. Zhang، X. یک روش مبتنی بر نقشه-جبر برای تشخیص تغییر خودکار و به روز رسانی داده های مکانی در مقیاس های چندگانه. ترانس. GIS ۲۰۱۸ ، ۲۲ ، ۴۳۵-۴۵۴٫ [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. هوانگ، جی. دنگ، م. چن، سی. ژو، اف. زی، اس. Fang, X. تطبیق خودکار دادههای ساختمان چند مقیاسی بر اساس برچسبگذاری آرامش و ترکیبهای الگو. ISPRS Int. J. Geo-Inf. ۲۰۱۹ ، ۸ ، ۳۸٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Carleer، AP; Wolff, E. تشخیص تغییر برای بهروزرسانیهای پایگاه داده برداری از طریق طبقهبندی منطقهای دادههای ماهوارهای VHR. در سنجش از دور برای پایش محیطی، کاربردهای GIS و زمینشناسی VII . انجمن بین المللی اپتیک و فوتونیک: بلینگهام، WA، ایالات متحده آمریکا، ۲۰۰۷; جلد ۶۷۴۹٫ [ Google Scholar ]
- Qin, R. تشخیص تغییر در مدلهای ساختمان LOD 2 با تصاویر استریوی فضایی با وضوح بسیار بالا. ISPRS J. Photogramm. Remote Sens. ۲۰۱۴ ، ۹۶ ، ۱۷۹-۱۹۲٫ [ Google Scholar ] [ CrossRef ]
- آبدستار، م. Zhong، Y. تشخیص تغییر ساختمان ها بر اساس تطبیق شکل برای تصاویر سنجش از راه دور با وضوح چندگانه. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۷ ، XLII-2/W7 ، ۶۸۳–۶۸۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هارتمن، ا. ماینل، جی. بهنیش، م. Hecht, R. Gebäudebestandsmonitoring—Prozessierungsschritte für den Aufbau homogeneer Gebäudedatensätze. Flächensparen Ökosystemleistungen Handl. ۲۰۱۶ ، ۶۹ ، ۲۰۳-۲۱۴٫ [ Google Scholar ]
- ماینل، جی. Krüger، T. Methodik eines Flächennutzungsmonitorings auf Grundlage des ATKIS-Basis-DLM. جی. کارتوگر. Geogr. Inf. ۲۰۱۴ ، ۶۴ ، ۳۲۴-۳۳۱٫ [ Google Scholar ] [ CrossRef ]
- منطقه اقتصادی اروپا گسترش شهری در اروپا – گزارش مشترک EEA-FOEN – آژانس محیط زیست اروپا ; دفتر انتشارات اتحادیه اروپا: لوکزامبورگ، ۲۰۱۶; در دسترس آنلاین: https://data.europa.eu/doi/10.2800/143470 (در ۱ دسامبر ۲۰۲۱ قابل دسترسی است).
- DESTATIS. Qualitätsbericht—Flächenerhebung Nach Art der Tatsächlichen Nutzung ; Statistisches Bundesamt (Destatis): ویسبادن، آلمان، ۲۰۱۸٫ [ Google Scholar ]
- Deutsche Bundesregierung. Die Deutsche Nachhaltigkeitsstrategie—Aktualisierung 2018 ; Presse-und Informationsamt der Bundesregierung: برلین، آلمان، ۲۰۱۸٫ [ Google Scholar ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. یک مشخصات LOD بهبود یافته برای مدل های ساختمانی سه بعدی. محاسبه کنید. محیط زیست سیستم شهری ۲۰۱۶ ، ۵۹ ، ۲۵-۳۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کادن، آر. کلبه، TH برآورد کل تقاضای انرژی کل شهر در ساختمانها با استفاده از مدلهای معنایی شهر سه بعدی و دادههای آماری. در مجموعه مقالات ISPRS Annals of the Photogrammetry، سنجش از دور و علوم اطلاعات فضایی، استانبول، ترکیه، ۲۷-۲۹ نوامبر ۲۰۱۳٫ جلد II-2-W1، صص ۱۶۳-۱۷۱٫ [ Google Scholar ]
- ژانگ، ایکس. استوتر، جی. آی، تی. کراک، ام.-جی. مولنار، ام. ارزیابی خودکار ترازهای ساختمان در نقشه های تعمیم یافته. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۳ ، ۲۷ ، ۱۵۵۰-۱۵۷۱٫ [ Google Scholar ] [ CrossRef ]
- بروولی، MA; Zamboni, G. روشی جدید برای ارزیابی دقت فضایی و کامل بودن ردپای ساختمان OpenStreetMap. ISPRS Int. J. Geo-Inf. ۲۰۱۸ ، ۷ ، ۲۸۹٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کوین، آر. تیان، جی. Reinartz, P. تشخیص تغییر سه بعدی-رویکردها و کاربردها. ISPRS J. Photogramm. Remote Sens. ۲۰۱۶ ، ۱۲۲ ، ۴۱-۵۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فن، اچ. Zipf، A.; فو، س. Neis، P. ارزیابی کیفیت برای ایجاد دادههای ردپایی در OpenStreetMap. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۴ ، ۲۸ ، ۷۰۰-۷۱۹٫ [ Google Scholar ] [ CrossRef ]
- پدرینیس، اف. مورل، ام. Gesquière, G. Change Detection of Cities. در علوم زمین اطلاعات سه بعدی ; یادداشت های سخنرانی در اطلاعات جغرافیایی و نقشه برداری. Springer: Cham, Switzerland, 2015. [ Google Scholar ] [ CrossRef ]
- ژو، ایکس. چن، ز. ژانگ، ایکس. Ai, T. تشخیص تغییر برای ردپای ساختمان با سطوح مختلف جزئیات با استفاده از ترکیب شکل و تجزیه و تحلیل الگو. ISPRS Int. J. Geo-Inf. ۲۰۱۸ ، ۷ ، ۴۰۶٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- شوونگرت، RA سنجش از دور: مدلها و روشها برای پردازش تصویر . مطبوعات دانشگاهی: کمبریج، MA، ایالات متحده آمریکا، ۲۰۰۶; شابک ۹۷۸-۰-۰۸-۰۴۸۰۵۸-۹٫ [ Google Scholar ]
- غنی، ارتش ملی; Abidin, SZZ طبقه بندی الگوی رشد شهری با استفاده از الگوریتم طول مرزی رابطه توپولوژیکی: یک مطالعه تجربی. در روندهای اخیر در فناوری اطلاعات و ارتباطات ; Saeed, F., Gazem, N., Patnaik, S., Saed Balaid, AS, Mohammed, F., Eds.; انتشارات بین المللی اسپرینگر: چم، سوئیس، ۲۰۱۸; صص ۵۴۵-۵۵۳٫ [ Google Scholar ]
- روتزینگر، ام. روتنشتاینر، اف. Pfeifer, N. مقایسه تکنیکهای ارزیابی برای استخراج ساختمان از اسکن لیزری هوابرد. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. ۲۰۰۹ ، ۲ ، ۱۱-۲۰٫ [ Google Scholar ] [ CrossRef ]
- Veltkamp، R. تطبیق شکل: معیارها و الگوریتمهای تشابه. در مجموعه مقالات کنفرانس بین المللی مدل سازی شکل و کاربردها، جنوا، ایتالیا، ۷-۱۱ مه ۲۰۰۱٫ ص ۱۸۸-۱۹۷٫ [ Google Scholar ]
- AdV. Produktstandard für 3D-Gebäudemodelle نسخه ۱٫۴ ; Arbeitsgemeinschaft der Vermessungsverwaltungen der Länder der Bundesrepublik Deutschland (AdV): مونیخ، آلمان، ۲۰۱۷؛ پ. ۶٫ [ Google Scholar ]
- کای، ال. شی، دبلیو. میائو، ز. هائو، ام. اقدامات ارزیابی دقت برای استخراج شی از تصاویر سنجش از دور. Remote Sens. ۲۰۱۸ , ۱۰ , ۳۰۳٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]