۱٫ مقدمه
تغییرات محیطی جهانی یک موضوع مداوم است و به طور گسترده از دیدگاه های مختلف مورد بحث قرار گرفته است. سه عامل اصلی دخیل در تغییرات محیطی جهانی عبارتند از افزایش غلظت دی اکسید کربن در جو، تغییرات در چرخه چسبندگی جهانی، و تغییر در پوشش زمین و کاربری زمین [ ۱ ]. افزایش غلظت دی اکسید کربن عمدتاً در مناطق شهری رخ می دهد که بیش از ۷۰ درصد از انتشار دی اکسید کربن را تشکیل می دهند [ ۲ ]. رشد سریع جمعیت عامل اصلی افزایش غلظت دی اکسید کربن است [ ۳ ]. افزایش ۱ درصدی جمعیت با افزایش ۱٫۲۸ درصدی انتشار دی اکسید کربن همراه است [ ۴ ]]. رشد سریع جمعیت منجر به تغییرات زیادی در کاربری زمین از فضاهای باز سبز به کاربری های اقتصادی تر مانند شهرک ها و ادارات شده است. تغییر کاربری اراضی نیز با عامل سوم تغییرات محیط جهانی مرتبط است. در عین حال، تعادل اکولوژیکی محیط شهری به اندازه توسعه ارزش اقتصادی مناطق شهری اهمیت دارد. توسعه بیش از حد در مناطق شهری منجر به کاهش فضای باز سبز و مشکلات زیست محیطی مانند گرم شدن شهرها و آلودگی هوا می شود. گرم شدن شهرها و افزایش آلودگی هوا در شهرها اثرات زیانبار بسیاری از جمله مشکلات سلامتی را به همراه دارد [ ۵ ].
فضاهای باز سبز شهری دارای مزایای زیست محیطی اساسی هستند [ ۶]. فضای باز سبز در محیط توسعه جهانی در حال حاضر برای حفظ تعادل کیفیت محیطی یک منطقه، به ویژه در مناطق شهری که دارای مشکلات مختلف مرتبط با چنین مشکلات پیچیده فضایی هستند، مورد نیاز است. بر اساس قوانین مندرج در بند ۲ ماده ۲۹ قانون شماره ۲۶ سال ۲۰۰۷ در مورد برنامه ریزی فضایی قابل اجرا در اندونزی، بیان شده است که نسبت فضای باز سبز در یک منطقه شهری باید حداقل ۳۰ درصد از مساحت کل شهر باشد. حفظ و توسعه فضاهای باز سبز دو تلاش راهبردی در کاهش آلودگی محیط زیست شهری است زیرا درختان می توانند به طور طبیعی گاز CO را که به شکل ترکیبات کربنی ذخیره شده و به شکل اکسیژن آزاد می شود جذب کنند و گرما را جذب کنند تا محیط را کاهش دهد. دمای هوا [ ۷].
برخی از راه حل های گرمایش شهری و افزایش آلودگی هوا در مناطق شهری، کاشت مجدد زمین های حیاتی و مدیریت فضاهای باز سبز موجود با نقشه برداری و ایجاد پایگاه های اطلاعاتی درختی است. در حال حاضر، نقشه برداری از فضاهای باز سبز و ساخت پایگاه های داده درختی همچنان بر اساس یک سیستم اطلاعات جغرافیایی (GIS) مبتنی بر داده های دو بعدی (۲ بعدی) است. در عین حال، یک مدل سه بعدی (۳D) دارای نمایش بصری است که به شکل واقعی نزدیکتر است تا محصول بهتری تولید کند. بر این اساس، یک مدل سه بعدی برای ایجاد پایگاه داده درختی برای مدیریت فضای باز سبز مورد نیاز است. در مدل سازی سه بعدی یک شی، اصطلاح سطح جزئیات (LOD) شناخته می شود. LOD برای توصیف سطح جزئیات از جنبه های هندسی و معنایی مدل سه بعدی استفاده می شود. هرچه LOD استفاده شده بیشتر باشد، مدل سه بعدی جزئیات بیشتری دارد. تفاوت در LOD بر نتایج تجزیه و تحلیل انجام شده تأثیر می گذارد. مثلا، [۸ ] تجزیه و تحلیل شی سه بعدی تک تک درختان را برای تخمین شدت سایه های اطراف درختان انجام می دهد. درختان منفرد با LOD بالاتر نتایج بهتری میدهند یا به وضعیت واقعی نزدیکتر هستند. این تحقیق نشان میدهد که مدلسازی درخت منفرد در سطوح LOD بالا برای مناطق بزرگ برای انجام یک تحلیل بهتر منطقه شهری مورد نیاز است. می توان از مدل سه بعدی درخت به عنوان پایه پایگاه داده استفاده کرد و تحلیل فضایی جامع تری را انجام داد.
به عنوان دادههای ورودی برای مدلسازی درخت سهبعدی، جمعآوری دادههای ابر نقطه به طور گسترده با استفاده از وسایل نقلیه هوایی بدون سرنشین (UAV) انجام شده است. پهپادها می توانند دوربین ها و حسگرهای LiDAR را در انواع و اندازه های مختلف حمل کنند. پهپادهای حامل دوربین و حسگرهای LiDAR به طور گسترده برای انجام مدیریت جنگلداری در اندونزی برای سازمانهای دولتی و خصوصی استفاده شدهاند. این به این دلیل است که پهپاد نسبتاً ارزانتر از روشهای معمولی است و منطقه وسیعتری را در زمان کوتاهتری پوشش میدهد. علاوه بر این، دقت محصولات تولید شده توسط پهپاد LiDAR و داده های فتوگرامتری پهپاد در حال افزایش است که باعث می شود استفاده از این خودروها و حسگرها نیز افزایش یابد.
مدل سازی سه بعدی تک تک اشیاء درختی را می توان به صورت ضمنی یا صریح انجام داد. مدلسازی صریح درخت فردی را میتوان با انجام اتصالات سطحی روی دادههای ابرهای نقطه از اکتساب میدانی انجام داد. روشهای برازش مورد استفاده کاملاً متنوع هستند، از سادهترین روش با استفاده از شکل کروی تا روشی پیچیده با استفاده از رویکرد هارمونیکهای کروی. مدل سازی سه بعدی صریح با این روش برازش به صورت خودکار انجام می شود تا روند را سرعت بخشد و نیروی انسانی درگیر را کاهش دهد. هدف این مقاله انجام مدلسازی درخت سه بعدی به طور صریح و خودکار با استفاده از دادههای فتوگرامتری UAV LiDAR و UAV است.
مقاله به شرح زیر تقسیم می شود: بخش ۱ فوریت ساخت یک مدل سه بعدی در مدیریت فضای باز سبز با استفاده از LiDAR و داده های ابرهای نقطه فتوگرامتری را توضیح می دهد. بخش ۲ برخی از کارهای مرتبط در مدل سازی سه بعدی درخت منفرد، استفاده از CityGML و روش تعیین زیست توده را مورد بحث قرار خواهد داد. بخش ۳ گردش کار پیشنهادی را شرح می دهد و روش های مورد استفاده در بخش پردازش داده ها را توضیح می دهد. بخش ۴نتایج تحقیقات انجام شده مانند انتخاب قطر سینه (DBH)، ایجاد مدل سایبان و تنه با استفاده از سه روش برازش سطح، ایجاد یک مدل سه بعدی در فرمت CityGML و محاسبه زیست توده در منطقه مورد نظر بخش ۵ بحث و تحلیل نتایجی است که در بخش ۴ ارائه شده است . بخش ۶ نتیجه گیری تحقیقی است که انجام شده است.
۲٫ کارهای مرتبط
در این زمان نیاز به داده های سه بعدی رو به افزایش است، با توجه به اینکه داده های سه بعدی را می توان برای اهداف مختلفی استفاده کرد که یکی از آنها تحلیل مناطق شهری است. مدلهای سهبعدی در یک منطقه شهری شامل ساختمانها، جادهها، پوشش گیاهی، بدنههای آبی و خاک خواهد بود که میتوانند در کاربردهای مختلف مورد استفاده قرار گیرند [ ۹ ]. مدل های سه بعدی را می توان به دو کاربرد تقسیم کرد: برنامه های کاربردی مبتنی بر تجسم و آنهایی که بر اساس تجسم نیستند [ ۱۰ ]. نمونه هایی از کاربردهایی که از یک مدل سه بعدی استفاده می کنند، تجزیه و تحلیل انتشار نویز در یک منطقه [ ۱۱ ، ۱۲ ]، کاداستر سه بعدی [ ۱۳ ]، مدیریت تأسیسات [ ۱۴ ]، تجزیه و تحلیل برآورد تابش خورشیدی [ ۱۵ ]، برآورد تقاضای انرژی در یک منطقه [ ۱۵] است.۱۶ ] و تقاضای آب شهری [ ۱۷ ].
پیشرفتهای سریع فناوری بر توسعه تکنیکهای پیچیدهتر جمعآوری دادهها تأثیر میگذارد. یک مدل سه بعدی را می توان از تکنیک های مختلف اکتساب [ ۹ ] به دست آورد، برای مثال فتوگرامتری [ ۱۸ ]، اسکن لیزری [ ۱۹ ، ۲۰ ، ۲۱ ]، اکستروژن از سایت های دو بعدی [ ۲۲ ]، رادار دیافراگم مصنوعی (SAR) [ ۲۳ ، ۲ ] و نقشه ها و مدل های معماری.
اشیاء مدل سهبعدی منطقه شهری در مدل دادههای زبان نشانهگذاری جغرافیای شهر (CityGML) ذخیره میشوند. CityGML یک مدل داده مبتنی بر XML است که برای توصیف هندسه و ویژگی های اشیاء سه بعدی استفاده می شود [ ۲۵ ]. علاوه بر این، CityGML رابطه و ساختار سلسله مراتبی یک شی سه بعدی را در پنج سطح LOD توصیف می کند. LOD اصطلاحی است که برای تعریف سطح جزئیات یک مدل سه بعدی استفاده میشود و پیامدهایی برای کاربردهای خاص دارد [ ۲۶ ، ۲۷ ]. در [ ۸ ]، در مورد تعریف مجدد LOD درختی به ۱۴ کلاس، یعنی از LOD 0.A تا LOD 3.D توضیح داده شده است.
مدلسازی درخت به صورت انفرادی را می توان با استفاده از روش های مختلف انجام داد. یکی از روش هایی که در این زمان انجام شده است، تقسیم هر شی درخت برای به دست آوردن اطلاعاتی در مورد موقعیت درخت، ارتفاع و قطر تاج پوشش است [ ۲۸ ]. مدل سازی به طور ضمنی بر اساس داده های پارامتر درختی انجام می شود. برای کاربرد وسیعتر، مقاله [ ۲۹] مدلسازی درختان منفرد در منطقه باغهای گیاهشناسی سنگاپور را روی LOD1 و LOD2 به طور همزمان از دادههای ابرهای نقطهای UAV LiDAR توصیف میکند. مدلسازی صریح درخت منفرد را میتوان با استفاده از روشهای برازش کروی، برازش بیضی و برازش هارمونیکهای کروی انجام داد. هارمونیک های کروی تابع خاصی است که برای تعریف سطح یک کره استفاده می شود. روش هارمونیک کروی می تواند به طور دقیق اجسام را مدل کند [ ۳۰ ]. هارمونیک های کروی اغلب در حل معادلات دیفرانسیل جزئی در بسیاری از زمینه های علمی استفاده می شود. مدل سازی سه بعدی با استفاده از روش هارمونیک های کروی در تحقیقات [ ۳۰ ] برای مدل سازی دقیق سلول ها انجام شده است.
یکی از روش های مدیریت فضاهای باز سبز، محاسبه زیست توده است. چهار روش اصلی برای محاسبه زیست توده وجود دارد: نمونهبرداری مخرب درجا، نمونهبرداری غیرمخرب با جمعآوری دادههای جنگلی در محل، تخمین از طریق سنجش از دور و ساخت مدل در این روش از روش چهارم استفاده میشود که با ساخت مدل، زیست توده را محاسبه میکند. نتایج مدلسازی سهبعدی تولید شده از اکتساب دادهها میتواند زیست توده را محاسبه کند. مدل سازی را می توان با استفاده از روش های مختلف نظرسنجی انجام داد. روش های بررسی که اغلب برای محاسبه زیست توده استفاده می شود، اسکن با استفاده از اسکنر لیزری زمینی (TLS) [ ۳۱ ، ۳۲ ]، روش UAV LiDAR [ ۳۳ ، ۳۴ ]، و روش فتوگرامتری UAV [ ۳۵ ، ۳۶ ] است.]. پارامترهای به دست آمده از نتایج بررسی عبارتند از DBH، ارتفاع درخت و عرض تاج. این پارامترها مبنای اولیه برای محاسبه زیست توده با استفاده از معادلات آلومتریک هستند. یکی از معادلات آلومتری که معمولاً مورد استفاده قرار می گیرد، معادله [ ۳۷ ] است. علاوه بر تعیین مقدار DBH روی درختان، محاسبه حجم نیز یکی از روشهای مدیریت درختان منفرد در فضای باز سبز است. در [ ۳۸ ]، مدلسازی سهبعدی درختان منفرد مستقیماً بر روی دادههای ابرهای نقطهای با استفاده از روشهای پوسته مقعر بازسازی سطح و روشهای شکل آلفای سه بعدی برای محاسبه حجم تاج درخت انجام شد. داده های مورد استفاده در این مطالعه با استفاده از پهپاد LiDAR به دست آمده است. در همین حال، در مطالعه [ ۳۹]، محاسبه حجم تاج بر روی داده های به دست آمده توسط TLS با استفاده از روش بدنه مقعر انجام شد.
۳٫ داده ها و روش های بکار گرفته شده
۳٫۱٫ داده ها
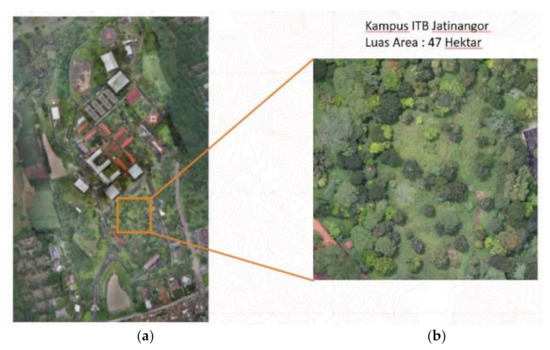
این تحقیق در پردیس Jatinangor انستیتوی فناوری باندونگ (ITB) (6°۵۵’۴۰٫۶″ S 107°۴۶’۰۸٫۹″ E، ۷۷۶ متر بالاتر از سطح دریا) انجام شد که مساحت آن ۴۷ هکتار است. پردیس ITB Jatinangor به این دلیل انتخاب شد که دارای پوشش گیاهی متنوعی است که به عنوان فضاهای باز سبز طبقه بندی می شوند. مدل سازی سه بعدی بر روی یکی از بخش های کوچک مشخص شده در شکل ۱ انجام شد که مساحت آن ۱ هکتار است.
داده های LiDAR با استفاده از حسگر Hesai Pandar 40 LiDAR که بر روی DJI Matrice 600 نصب شده است، به دست آمد. این پهپاد در ارتفاع ۵۰ متری با سرعت ۱ متر بر ثانیه پرواز می کند. جمعآوری دادهها در سه فرآیند پرواز پهپاد انجام شد که منجر به ایجاد سه ابر نقطه داده با مسیرهای پرواز پهپاد مربوطه آنها شد. محصول ابر نقطه LiDAR با استفاده از ۱۸ نقطه چک مستقل (ICP) که با استفاده از روش استاتیک سریع GNSS اندازهگیری شده بود، آزمایش شد و دارای دقت مختصات Z 0.248 متر و چگالی ۱۲۰ نقطه در متر مربع بود .
داده های فتوگرامتری با استفاده از دوربین سونی آلفا ۶۰۰۰ نصب شده بر روی پهپاد VTOL به دست آمد. این پهپاد در ارتفاع ۱۵۰ متری پرواز می کند و مقدار همپوشانی آن ۸۰ درصد است. پهپاد مورد استفاده دارای سیستم نقطه کنترل هوایی پس پردازش کینماتیک (PPK) است به طوری که هر عکس مختصات دقیقی از نقطه نوردهی دارد. فرآیند فتوگرامتری با استفاده از نرم افزار Agisoft Metashape با روش Structure form Motion (SfM) برای تولید ابرهای نقطه ای پردازش می شود.
کیفیت محصولات فتوگرامتری با استفاده از ۱۹ ICP مورد آزمایش قرار گرفت. ICPs با استفاده از روش استاتیک سریع به مدت ۲۰ دقیقه اندازه گیری شد. نتایج آزمون دقت محصول فتوگرامتری در جدول ۱ قابل مشاهده است. چگالی ابرهای نقطه فتوگرامتری ۱۰ نقطه در متر مربع است .
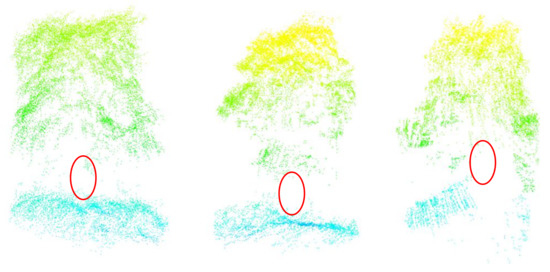
داده های ابرهای نقطه ای تولید شده توسط روش های فتوگرامتری UAV LiDAR و UAV را می توان در شکل ۲ مشاهده کرد.
همانطور که در شکل ۳ نشان داده شده است، ویژگی های ابرهای نقطه ای ایجاد شده توسط روش اکتساب LiDAR و فتوگرامتری را می توان از سطح مقطع مشاهده کرد . همانطور که در درخت و اشیاء ساختمان در شکل ۳ مشاهده می شود، ابرهای نقطه فتوگرامتری پهپاد کاملتر از داده های ابرهای نقطه ای UAV LiDAR به نظر می رسند . این به این دلیل است که پردازش فتوگرامتری از اصل تطبیق تصویر متراکم استفاده می کند که درون یابی را انجام می دهد، برخلاف ابرهای نقطه LiDAR که مستقیماً از برخورد انعکاس لیزر به جسم به دست می آیند. ویژگیهای مختلف بین ابرهای نقطهای فتوگرامتری پهپاد و ابرهای نقطهای پهپاد LiDAR بر نتایج مدلسازی سهبعدی درختی هم از نظر شکل و هم از نظر اندازه تأثیر میگذارد.
در دادههای ابرهای نقطهای UAV LiDAR، شکل تک درخت را میتوان به وضوح دید، برخلاف ابرهای نقطه فتوگرامتری، که فقط سطح تاج پوشش است، همانطور که در شکل ۴ مشاهده میشود . سپس دادههای ابر نقطه به صورت دستی با دیجیتالی کردن دادههای ارتوفوتوس موجود تقسیم میشوند. سپس دادههای ابرهای نقطهای از LiDAR و فتوگرامتری بر اساس دادههای برداری که قبلا ایجاد شدهاند، بریده میشوند. قبل از مدل سازی، قسمت تاج درخت به صورت دستی انتخاب می شد. رقومی دستی به گونه ای انجام می شود که نتایج مدل سازی سایبان انجام شده در مرحله بعد از دقت بالایی برخوردار باشد.
۳٫۲٫ روش
نمودار جریان روش تحقیق در شکل ۵ قابل مشاهده است. مرحله با به دست آوردن داده های میدانی با استفاده از دو روش شروع می شود: فتوگرامتری UAV و UAV LiDAR. روش UAV LiDAR به دلیل توانایی آن در انجام بازتاب های متعدد بر روی لیزر مورد استفاده، ابرهای نقطه ای دقیق را تولید می کند. علاوه بر این، دادههای LiDAR در اهداف مدیریت جنگلداری نیز مؤثر بوده است. در همین حال، فتوگرامتری پهپاد یک روش جمع آوری داده کم هزینه است که به طور گسترده برای نقشه برداری توپوگرافی و مدل سازی سه بعدی استفاده می شود. سپس، ابرهای نقطه به صورت دستی تقسیم می شوند. تقسیم بندی برای جدا کردن اشیاء درختی از اشیاء دیگر انجام می شود. ابرهای نقطه درخت منفرد تقسیمبندی شده برای به دست آوردن یک مدل سهبعدی درخت منفرد پردازش میشوند. محاسبات هندسه درختان مانند تنه درختان و تاج ها در اشکال جامد موثرتر است. علاوه بر این، مدل سه بعدی ایجاد شده در پایگاه داده سه بعدی فضای باز سبز وارد می شود. که از داده های هندسی مدل های سه بعدی و داده های معنایی درختان منفرد تشکیل شده است. نتایج مدلسازی سهبعدی درخت منفرد بهدستآمده از دو روش با در نظر گرفتن مزایا و معایب مربوطه مقایسه میشوند. در پایان، محاسبه زیست توده هم برای دادههای پهپاد LiDAR و هم برای دادههای فتوگرامتری پهپاد انجام میشود.
۳٫۲٫۱٫ بهترین روش تناسب
سه روش برازش داده برای انجام مدلسازی سهبعدی درخت منفرد استفاده میشود: روش برازش کروی، روش برازش بیضی و روش برازش هارمونیکهای کروی. روش برازش کروی از اصل حداقل مربعات برای یافتن مقدار بهینه نقطه مرکزی ابرهای نقطه و شعاع کره استفاده می کند [ ۴۰ ]. معادله ریاضی دایره همانگونه است که در رابطه (۱) مشاهده می شود.
سپس معادله (۱) به شکل یک تابع همانطور که در رابطه (۲) نشان داده شده است نوشته می شود و به یک تابع در معادله (۳) تبدیل می شود.
را می توان به صورت α نمادین کرد، بنابراین معادله (۳) دارای چهار پارامتر است: x ، y ، z ، و α. معادله را می توان با استفاده از عملیات ماتریسی، همانطور که در رابطه (۴) نشان داده شده است، حل کرد.
مقدار شعاع کره را می توان با رابطه (۵) محاسبه کرد.
تفاوت چندانی با برازش کروی ندارد، روش برازش بیضی از اصل حداقل مربع برای یافتن مقدار بهینه نقطه مرکزی ابرهای نقطه و پارامتر مسطح شدن بیضی استفاده می کند. معادله کلی بیضی در رابطه (۶) نشان داده شده است.
معادله (۶) ده پارامتر دارد اما این ۹ پارامتر مستقل هستند. معادله (۶) را می توان به معادله (۷) تبدیل کرد تا فقط ۹ پارامتر داشته باشد. معادله (۷) یک معادله خطی است که با روش حداقل مربع قابل حل است.
روش سوم مورد استفاده، روش برازش هارمونیک های کروی است. هارمونیک های کروی یک انتخاب طبیعی از توابع پایه است که همه توابع کروی دو دیفرانسیل را نشان می دهد. هارمونیک های کروی را می توان به عنوان توابع پیچیده ای از مرتبه l و درجه m تعریف کرد که در رابطه (۸) مشاهده می شود.
که در آن l و m اعداد صحیح هستند به طوری که | m | ≤ l ، و چند جمله ای های Legendre مرتبط هستند [ ۳۰ ]. هر تابع کروی f (θ, φ) را می توان با ترکیب خطی هارمونیک های کروی نشان داد. (θ, φ) همانطور که در رابطه (۹) نشان داده شده است.
سپس معادله (۹) به شکل ماتریسی تبدیل می شود و متغیرهای موجود در معادله با استفاده از روش حداقل مربع حل می شوند.
۳٫۲٫۲٫ ارزیابی دقت بهترین اتصال
سپس ابرهای نقطه تقسیم شده به صورت سه بعدی مدلسازی می شوند. مدل سه بعدی به دست آمده در قالب سطح ذخیره شده در جدول چهره ها و رئوس ذخیره می شود. سپس ارزش برازش (R2 ) برای مشاهده کیفیت نتایج مدلسازی محاسبه میشود. مقدار R ۲ با استفاده از فرمول در رابطه (۱۰) محاسبه می شود.
که در آن RSS مجموع مجذور باقیماندههای حاصل از تفریق فاصله از نقطه تا مرکز ابرهای نقطه با فاصله تا سطح مدلسازی است. TSS مخفف مجموع مجموع مربع است که مجموع مجذورات مقدار فاصله از نقطه مرکزی منهای میانگین فاصله داده از نقطه مرکزی است. به عبارت دیگر، TSS مقدار واریانس فاصله است. محاسبه مقدار R2 بر روی نتایج مدلسازی با استفاده از فتوگرامتری UAV و دادههای UAV LiDAR انجام میشود .
۳٫۲٫۳٫ قطر پستان قد و محاسبه زیست توده
قطر قد سینه (DBH) را می توان با یافتن معادله رابطه با شعاع تاج تاج درخت مدل کرد. برخی از معادلات مدل ریاضی ساخته شده در این تحقیق در رابطه (۱۱) تا معادله (۱۴) بیان شده است.
که در آن D مقدار تخمینی DBH، r مقدار شعاع تاج درخت اندازه گیری شده، و b ضریب معادله است.
زیست توده وزن یا حجم کل موجودات در یک منطقه یا حجم خاص است. زیست توده نیز به عنوان مقدار کل ماده زنده بالای سطح یک درخت تعریف می شود و بر حسب تن وزن خشک در واحد سطح بیان می شود [ ۴۱ ]. زیست توده جنگلی نقش اساسی در چرخه بیوژئوشیمیایی، به ویژه در چرخه کربن ایفا می کند. از کل کربن جنگل، حدود ۵۰ درصد آن در پوشش گیاهی جنگل ذخیره می شود [ ۴۲ ]. پویایی کربن در طبیعت را می توان به سادگی با چرخه کربن توضیح داد. چرخه کربن یک چرخه بیوژئوشیمیایی است که شامل تبادل کربن بین بیوسفر، پدوسفر، ژئوسفر، هیدروسفر و جو زمین است. چرخه کربن پیچیده است و هر فرآیند بر فرآیندهای دیگر تأثیر می گذارد.
مدل آلومتریک زیست توده یک مدل آماری برای تخمین زیست توده درخت بر اساس قطر یا ارتفاع درخت [ ۴۳ ] و تراکم چوب به عنوان یک متغیر مهم در تخمین زیست توده در جنگل های استوایی است [ ۳۷ ]. بنابراین، برای حمایت از برآورد دقیق ذخایر زیست توده و کربن، توسعه مدلهای آلومتریک زیست توده برای گونههای مختلف درخت و مکانهای رشد ضروری است [ ۴۴ ].
۴٫ نتایج
۴٫۱٫ مدل قطر سینه (DBH).
مدلسازی دقیق پارامترهای ساختاری جنگل برای مدیریت عملیاتی جنگل، فهرستبندی جنگلها و مدلسازی چرخه کربن ضروری است [ ۴۵ ]. تنه درخت یکی از اساسی ترین اجزای ساختار جنگل است و نیاز به مدل سازی دقیق دارد. مدل تنه درخت بر اساس پارامترهای DBH است. مقدار DBH نه تنها به عنوان پارامتری برای مدل سازی سه بعدی استفاده می شود. همچنین می تواند AGB را برای محاسبه ذخایر کربن در یک جنگل تخمین بزند.
مقدار تخمینی DBH را می توان از مدل رگرسیون رابطه با سایر پارامترهای درخت مانند شعاع تاج درخت و ارتفاع درخت محاسبه کرد. در این تحقیق، DBH درخت از روی مقدار شعاع تاج درخت که از ابرهای نقطهای بهدستآمده با روشهای فتوگرامتری UAV LiDAR و UAV قابل تشخیص است، تخمین زده میشود. مقادیر DBH به طور مستقیم در میدان برای ۳۳ نقطه درخت اندازه گیری شد تا مدل DBH ساخته شود. مقدار شعاع تاج با محاسبه شعاع ابرهای نقطه از تاج به روش حداقل مربعات به دست آمد. رابطه بین DBH به دلیل اندازهگیریهای میدانی و شعاع تاج برآورد شده با استفاده از چندین معادله، یعنی خطی، توان، چند جملهای و لگاریتمی جستجو میشود. یک آزمون همبستگی شعاع تاج درخت با متغیر DBH از اندازهگیریهای میدانی برای انتخاب متغیرهای برآورد DBH انجام شد. قوی ترین مقدار همبستگی به عنوان یک متغیر در تخمین DBH درختی استفاده می شود. نمودار پراکندگی رابطه بین DBH درخت و شعاع تاج درخت را می توان درشکل ۶ .
نمودار رگرسیون هر روش در شکل ۷ و مقادیر ضرایب هر معادله را می توان در جدول ۲ مشاهده کرد.، جایی که r شعاع تاج درخت و D DBH است. نمودارهای رگرسیون تولید شده توسط معادلات خطی، توانی و چند جمله ای تفاوت چندانی با هم ندارند. این به دلیل رابطه بین شعاع تاج درخت و DBH است که تمایل به خطی دارد. ضریب معادله توان نزدیک به مقدار ۱ است که ۱٫۲۴۷۶ است و ضریب درجه دوم معادله چند جمله ای بسیار کوچک است که ۰٫۰۰۱۵- است. در مقابل، معادله لگاریتمی یک نمودار متفاوت از معادلات دیگر تولید می کند. رگرسیون با استفاده از معادلات لگاریتمی تمایل به نادیده گرفتن دادههایی با شعاع تاج درخت بزرگ و مقادیر DBH به دلیل مقدار کمی داده در خوشه دارد.
نتایج رگرسیون معادلات و مقدار R2 را از هر معادله استفاده شده تولید می کند. جدول ۲ نشان می دهد که معادله چند جمله ای بیشترین مقدار R ۲ را در بین سایر معادلات دارد. معادله و مقدار R ۲ هر روش رگرسیون را می توان در جدول ۲ مشاهده کرد. سپس از نتایج رگرسیون روش چند جملهای برای محاسبه مقدار DBH استفاده میشود، که برای ایجاد یک مدل سه بعدی از درخت و محاسبه AGB استفاده میشود، زیرا دارای بزرگترین مقدار R ۲ در بین معادلات دیگر است.
۴٫۲٫ نتیجه برازش ابرهای نقطه
در این مطالعه چهار نمونه از درخت مدلسازی شد. چهار نمونه ویژگی های متفاوتی دارند. نمونه اول و دوم درختانی هستند که تاج پوششی با تراکم بالا دارند. نمونه درخت اول دارای ویژگی های متراکم در جهت عمودی است، در حالی که نمونه دوم دارای ویژگی های متراکم در جهت افقی است. سومین و چهارمین نمونه درختان گونه های درختی بلند هستند اما دارای تاج پوشش کم تراکم هستند. ابرهای نقطه تمام نمونه های درخت را می توان در شکل ۸ مشاهده کرد. شکل ابرهای نقطهای از LiDAR و دادههای فتوگرامتری تقریباً برای درختان با تاج پوشش با چگالی بالا یکسان است، در حالی که برای درختان با تاج پوشش کم تراکم، ابرهای نقطه فتوگرامتری شبیه درختان واقعی نیستند.
مقدار R ۲ اتصالات کروی از ۰٫۰۰۲ تا ۰٫۰۲۹ متغیر است. این مقدار ناچیز است و نشان می دهد که مدل سازی سه بعدی با استفاده از روش برازش کره توصیه نمی شود. این به این دلیل است که اتصالات کروی نمی تواند اشکال مختلف سایبان را در خود جای دهد. به عنوان مثال، در درخت نمونه ۱، شکل برگ هایی که به سمت بالا امتداد می یابد قابل مدل سازی نیست. علاوه بر این، در مدل درختی دوم، به شکل درختی که به طرف امتداد می یابد، مدل تاج پوشش حاصل از حد پایینی مدل تنه تشکیل شده فراتر می رود، همانطور که در شکل ۹ مشاهده می شود .
مقدار R ۲ در مدلسازی سهبعدی درخت منفرد با استفاده از روش برازش بیضی متنوعتر است و دارای طیف وسیعی از مقادیر است. در این روش مقدار R ۲ از ۰٫۳۳۸ تا ۰٫۹۵۲ متغیر است. این به این دلیل است که روش برازش بیضی در ایجاد شکل تاج درخت منفرد انعطاف پذیرتر است. جهت و اندازه مدل با شکل ابرهای نقطه ای درخت منفرد مطابقت دارد. در برنامه، گزینه ای برای تنظیم پیچیدگی سطح بیضوی حاصل وجود دارد. هر چه مقدار پیچیدگی کمتر باشد، سطوح و رئوس سطح کمتر است و بالعکس. با این حال، این بر مقدار R 2 تأثیر نمی گذاردساخته شده است. مقدار پیچیدگی فقط بر مدل بصری حاصل تأثیر می گذارد. نتایج مدلسازی را می توان در شکل ۱۰ مشاهده کرد.
روش برازش هارمونیک های کروی بالاترین مقدار میانگین R ۲ را در مقایسه با سایر روش های برازش می دهد. روش هارمونیک کروی دارای مقدار R ۲ بین ۰٫۳۲۴ تا ۰٫۹۴۵ است. روش هارمونیک کروی می تواند شکل درخت را با توجه به شکل تاج ایجاد شده توسط ابرهای نقطه ای شکل دهد که در شکل ۱۱ دیده می شود . با این حال، چیزی که در این روش کم است این است که تعداد زیادی رئوس و وجه بر روی سطح ایجاد می شود، بنابراین به مدت زمان طولانی برای پردازش داده ها نیاز دارد و همچنین هنگام تبدیل به فرمت CityGML، اندازه سطح نسبتاً بزرگی تولید می کند.
۴٫۳٫ نتیجه تبدیل CityGML
مدلسازی درختان انفرادی نیز در منطقه مورد نظر با ۶۴ درخت انجام می شود. سپس نتایج مدلسازی سهبعدی درخت منفرد در ناحیه مورد نظر به فرمت CityGML تبدیل میشود. این برنامه یک مدل سه بعدی از ابرهای نقطه LiDAR و فتوگرامتری روی یک سطح تولید می کند. سطوح در ماتریس های چهره و رئوس ذخیره می شوند. فرمت چهره ها و رئوس باید به یک ماتریس n × ۱۲ مطابق با فرمت چند سطحی در CityGML تبدیل شود، که در آن n تعداد وجوه در درخت منفرد است. داده های چند سطحی در بخش <gml:posList> به عنوان نمایش هندسی درخت برای بخش های تاج و تنه ذخیره می شوند.
فرمت CityGML را می توان در نرم افزار FZK Viewer باز کرد. نتایج مدل سازی سه بعدی در فرمت CityGML در شکل ۱۲ قابل مشاهده است.
۴٫۴٫ تخمین زیست توده
محاسبه AGB در ناحیه مورد نظر انجام می شود که در قسمت قبل مدل سازی شد. تخمین AGB از داده های DBH به دست آمده از شعاع تاج درخت به دست آمد. مقدار شعاع تاج درخت از هر روش مدلسازی به دست میآید: برازش کره، برازش بیضی و برازش هارمونیکهای کروی. مقدار شعاع تاج برازش کره از شعاع کره مدل شده به دست می آید. در روش بیضی، مقدار شعاع تاج پوشش از میانگین شعاع مسطح شدن مدل بیضوی به دست می آید. در روش هارمونیک های کروی، مقدار شعاع از فاصله متوسط هر نقطه تا مرکز مدل تاج گرفته می شود. در این مطالعه، محاسبه آلومتریک AGB از معادله (۱۵) از [ ۳۷ ] استفاده می کند.
که در آن D DBH بر حسب سانتی متر و است زیست توده بالای زمین تخمین زده شده است. محاسبه زیست توده بر روی دو مجموعه داده، یعنی دادههای ابرهای نقطهای UAV LiDAR و دادههای ابرهای نقطه فتوگرامتری پهپاد انجام شد. محاسبه زیست توده بر اساس مقدار DBH به دست آمده از تاج ابرهای نقطه ای UAV LiDAR و فتوگرامتری پهپاد است. سپس محاسبات دو روش با استفاده از نتایج اندازهگیریهای DBH در این زمینه تأیید شد. محاسبه زیست توده با استفاده از دادههای UAV LiDAR با روش مدلسازی کره، نزدیکترین نتایج را به ارزش صحتسنجی میدانی با دقت ۷۸ درصد میدهد. در همین حال، روش با دورترین محاسبه، روش دادههای فتوگرامتری با استفاده از روش مدلسازی هارمونیکهای کروی با دقت ۴۴ درصد است. مقایسه نتایج محاسبات زیست توده با استفاده از روش UAV LiDAR، فتوگرامتری پهپاد،جدول ۴ .
۵٫ بحث
۵٫۱٫ تجزیه و تحلیل تخمین قد سینه (DBH).
درخت DBH با استفاده از یک معادله آلومتریک که به رابطه آن با شعاع تاج درخت نگاه می کند، تعیین می شود. مدل معادلات چند جمله ای بهترین نتایج را به دست می دهد زیرا دارای بیشترین مقدار R ۲ در بین معادلات دیگر است. مقدار R2 معادله چند جمله ای ۰٫۸۷۰ نشان می دهد که تاج درخت رابطه قوی با درخت DBH از نتایج اندازه گیری میدانی دارد . این نشان می دهد که مدل می تواند قطر تنه را تا ۸۷% بر اساس شعاع تاج درخت تخمین بزند و عوامل دیگر ۱۳% باقی مانده را توضیح می دهند. این مطابق با تحقیقات انجام شده توسط [ ۴۶ ] است که یک رابطه قوی بین طول قطر تاج و DBH با R2 وجود دارد .مقدار ۰٫۷۷۸ با استفاده از معادله چند جمله ای. با این حال، تفاوت چندان قابل توجهی نیست. معادله لگاریتمی بدترین مقدار R ۲ را از همه دارد. این نشان می دهد که معادله لگاریتمی نمی تواند رگرسیون بین قطر DBH و شعاع تاج درخت را انجام دهد.
در برخی از مطالعات، مانند تحقیقات انجام شده توسط [ ۴۷ ]، مقدار DBH به طور مستقیم از ابرهای نقطه ای با استفاده از روش های تخمینی مانند Hough transform، RANSAC و RTLS به دست می آید. این نتایج یک بایاس ۰٫۱ سانتی متری با RMSE 6 سانتی متر را نشان می دهد. در این مطالعه، به دلیل چگالی کم ابرهای نقطه ای تولید شده توسط LiDAR، نمی توان از این روش استفاده کرد. چگالی به دست آمده از ابرهای نقطه در تحقیق [ ۴۷ ] ۲۰۰۰ نقطه در متر مربع است ، در حالی که در این مطالعه، چگالی تنها حدود ۱۲۰ متر مربع برای داده های LiDAR است، بنابراین بخش تنه به وضوح دیده نمی شود. در شکل ۱۳ قابل مشاهده است، جایی که ابرهای نقطه تنه به وضوح دیده نمی شوند. این به دلیل تفاوت در سنسورهای LiDAR مورد استفاده است. علاوه بر این، ابرهای نقطه ای داده های فتوگرامتری فقط سطح تاج درخت را می پوشانند و ایجاد ابرهای نقطه ای از تنه با استفاده از روش فتوگرامتری غیرممکن است. روش مورد استفاده در این مقاله برای نوع سنسور LiDAR مناسب است که ابرهای نقطه ای با چگالی کم تولید می کند.
در مطالعات دیگر، روش فتوگرامتری مورد استفاده برای محاسبه DBH، روش فتوگرامتری با برد نزدیک است [ ۴۸ ]. محاسبه DBH با استفاده از روش فتوگرامتری برد نزدیک دارای مقدار خطای میانگین مربعات ریشه (RMSE) 4.41 سانتی متر است. اما نقطه ضعف این روش این است که اجرای آن چالش برانگیز بوده و نسبت به روش فتوگرامتری پهپاد به زمان بسیار بیشتری نیاز دارد. به این ترتیب، این تحقیق از معادلات آلومتریک برای به دست آوردن مقدار DBH از هر درخت به دست آمده از داده های شعاع تاج درخت استفاده می کند.
۵٫۲٫ D بازسازی درختان تجزیه و تحلیل
روش مدلسازی سهبعدی با استفاده از برازش هارمونیکهای کروی در مقایسه با روشهای برازش کره و برازش بیضی زمانی که از میانگین مقدار R2 و فرم بصری حاصل مشاهده میشود، بهترین است . به طور کلی، مدل سازی سه بعدی تولید شده از داده های LiDAR بهتر از مدل سه بعدی تولید شده توسط فتوگرامتری برای هر روش است. ابرهای نقطهای که توسط دادههای LiDAR تولید میشوند، چگالی بالاتری دارند و به شکل جسم اصلی نزدیکتر هستند، بنابراین مدل سهبعدی به دست آمده حتی بهتر است. علاوه بر این، نمونه های ۱ و ۲ درخت دارای R ۲ بالاتری هستندمقدار، و مدل نسبت به نمونههای جداگانه ۳ و ۴ به شکل واقعی نزدیکتر است. نمونههای درخت ۱ و ۲ نسبت به نمونههای ۳ و ۴ دارای ویژگیهای تاج پوشش با چگالی بالا هستند. درختی با تاج پوشش با تراکم بالا دادههای ابرهای نقطهای بیشتری تولید میکند. داده های ابرهای نقطه پایین باعث می شود که مدل سطح تاج تشکیل نشود.
با این حال، فرآیند اتصال همچنان دارای اشکالاتی است، از جمله در مورد اول، قسمت پایین سایبان به خوبی شکل نمی گیرد، به خصوص در مدل سازی با استفاده از ابرهای نقطه فتوگرامتری. این به این دلیل است که داده های ابری نقطه فتوگرامتری فقط یک سطح از درخت است و فقط مرکز تاج پوشش را می پوشاند. مدلسازی دادههای LiDAR همیشه قسمت پایینی خوبی از سایبان ایجاد نمیکند. بین سایبان و تنه شکاف هایی وجود دارد که به نظر می رسد سایبان شناور است. این به این دلیل است که نمونه درخت دوم دارای یک تاج بسیار متراکم است به طوری که نمی توان ابرهای نقطه ای در پایین را به دست آورد. برازش انواع درخت سوم و چهارم با روش برازش هارمونیک کروی پیچیده است.
در اصل، روش هارمونیکهای کروی، ابرهای نقطهای حاصل از جمعآوری دادههای فتوگرامتری UAV LiDAR و UAV را به شکل صافتری از سطح بسته تبدیل میکند. ابرهای نقطهای که مستقیماً توسط UAV LiDAR تولید میشوند تصادفی و نامنظم هستند، بنابراین روش هارمونیکهای کروی دادهها را به دادههای ابر نقطهای تبدیل میکند که سطح پایدارتری را تشکیل میدهند. سپس فرآیند ساخت یک سطح از دادههای ابرهای نقطهای حاصل از تبدیل هارمونیکهای کروی با استفاده از روشهای مختلفی مانند بدنه محدب، بدنه مقعر، شکل آلفا و پوسته قوی انجام میشود. این روش ها سطوح مختلفی را با توجه به الگوریتم هر تکنیک تولید می کنند. نتایج اتصال سطح را می توان در شکل ۱۴ و شکل ۱۵ مشاهده کرد.
روشهای بدنه محدب و بدنه مقعر دادههای سادهتری با رئوس و وجههای کمتر تولید میکنند. این به این دلیل است که روشهای بدنه محدب و بدنه مقعر بازسازی سطح را تنها در بیرونیترین قسمت ابرهای نقطهای حاصل انجام میدهند. سطح تشکیل شده توسط روش های بدنه مقعر و بدنه محدب تقریباً یکسان است.
شکل آلفا یک رویکرد اکتشافی است و در نمونه گیری یکنواخت به خوبی عمل می کند. با این حال، مقدار بهینه آلفا بر روی چگالی نمونهبرداری است که به طور مداوم در قسمتهای مختلف سطح تغییر میکند [ ۴۹ ]. در روشهای شکل آلفا و پوسته قوی، فرم سطح بیشتر از شکل ابرهای نقطهای پیروی میکند که پیامدهایی برای تعداد رئوس و تعداد بیشتری از وجوه دارد. تفاوت هایی در محاسبات حجم تولید شده از سطح از داده های LiDAR و داده های فتوگرامتری وجود دارد. با استفاده از داده های LiDAR، حجم حاصل از ۶۰۰ تا ۷۰۰ متر مکعب متغیر است ، در حالی که داده های فتوگرامتری بین ۸۰۰ تا ۹۰۰ متر مکعب است .. تفاوت قابل توجهی وجود دارد زیرا ابرهای نقطه ای تولید شده به روش فتوگرامتری فقط در بالای سایبان قرار دارند، بنابراین مدل تولید شده در پایین تاج به طور کامل شکل نمی گیرد و در نتیجه شکل مدل سازی متفاوتی از سطح تولید شده از LiDAR ایجاد می شود. داده ها. تعداد رئوس، وجه ها و حجم های تولید شده برای هر روش بازسازی سطح را می توان در جدول ۵ مشاهده کرد.
به طور کلی، روش پوسته قوی با استفاده از دادههای LiDAR بهترین روش در انجام بازسازی سطح ناشی از ابرهای نقطهای حاصل از تبدیلهای هارمونیک کروی است.
۵٫۳٫ تبدیل CityGML و ذخیره سازی داده ها
هر روش برازش دارای زمان تبدیل و اندازه داده های حاصل متفاوت است. در منطقه مورد علاقه، با دستگاهی که استفاده کردیم، روش برازش کره ۶ ثانیه طول می کشد تا تبدیل شود و داده CityGML با حجم ۱۳ مگابایت تولید می کند. روش برازش بیضی ۲۴ ثانیه طول می کشد و داده های CityGML در ۶۴ مگابایت دارد. روش هارمونیک کروی به عنوان پیچیده ترین روش ۳۵۰ ثانیه طول می کشد و یک فایل CityGML با حجم ۵۰۰ مگابایت تولید می کند.
بر اساس نتایج مدلسازی، برای تجسم و تجزیه و تحلیل مناطق فضای باز سبز برای منطقهای که خیلی وسیع یا کمتر از ۵۰ هکتار نیست، روش برازش هارمونیکهای کروی میتواند زمان تبدیل و اندازه دادههای حاصل را در نظر بگیرد. در همین حال، برای انجام مدلسازی درختان جداگانه در فضاهای سبز نسبتاً بزرگ و یا بالای ۵۰ هکتار، روش مناسب مورد استفاده، روش برازش کروی و برازش بیضی است. با توجه به اینکه این روش می تواند به سرعت داده ها را در فرمت CityGML تولید کند، اندازه داده ها نسبتاً کوچک است و همچنان می توان آن را توسط رایانه هایی با مشخصات نسبتاً پایین جا داد.
از نظر بصری، مدل سه بعدی تولید شده توسط روش هارمونیک کروی، وضعیت واقعی در میدان را بهتر توصیف می کند. روش برازش بیضی مدلی با تصاویر بصری خوب تولید می کند، اما برخی از درختان ابرهای نقطه ای کمی دارند، بنابراین مدل سه بعدی به دست آمده یک بیضی کامل را تشکیل نمی دهد. این را می توان با فیلتر کردن یا انتخاب درختان مدل سازی شده اصلاح کرد. یکی از روش های فیلترینگ مورد استفاده، روش تحلیل موجک است که توسط [ ۵۰ ] انجام شد. این روش داده های ابرهای نقطه ای تولید شده توسط روش فتوگرامتری پهپاد را فیلتر می کند که در نظر گرفته می شود قبل از مدل سازی نویز زیادی دارد. درختانی که نقاط داده ابری آنها زیر آستانه هستند را می توان نادیده گرفت و مدل سازی انجام نمی شود.
۵٫۴٫ تجزیه و تحلیل تخمین زیست توده بالای زمین
نتایج محاسبه زیست توده نشان میدهد که اندازهگیریها با استفاده از دادههای UAV LiDAR هر دو با استفاده از مدلسازی کره، بیضی و هارمونیک کروی مقادیری را ارائه میکنند که نزدیکترین به نتایج اعتبارسنجی میدانی است. تخمین مقدار AGB با استفاده از دادههای UAV LiDAR دقتی در محدوده ۷۱ تا ۷۸ درصد در مقایسه با نتایج صحتسنجی میدانی ارائه میدهد، در حالی که تخمین با استفاده از دادههای فتوگرامتری دقتی در محدوده ۴۳-۴۴ درصد میدهد. این به این دلیل است که مقدار تقریبی شعاع تاج هر درخت نسبت به داده های فتوگرامتری با شرایط واقعی میدان قابل مقایسه است. داده های فتوگرامتری دارای ارزش بسیار بیشتری نسبت به داده های اعتبار سنجی میدانی هستند زیرا چندین درخت دارای مقدار تاج درخت بسیار بزرگی هستند که بر مقدار تخمینی DBH تأثیر می گذارد. نمونه ای از ارزش تاج درخت بسیار بزرگ را می توان در آن مشاهده کردشکل ۱۶ a که با حروف A و B در مقایسه با شکل ۱۶ b که با حروف A و B نشان داده شده است. تفاوت قابل توجهی در شعاع تاج درخت وجود دارد که باعث تفاوت در مقدار AGB می شود.
مقدار تخمینی AGB تا حد زیادی توسط مقدار DBH بدست آمده از معادله آلومتریک به دست آمده در بخش قبل تعیین می شود. رابطه بین مقادیر DBH از اندازهگیریهای میدانی و تخمینهای DBH با استفاده از سه روش مدلسازی را میتوان در شکل ۱۷ مشاهده کرد. هنگامی که DBH تخمین زده شده با استفاده از داده های UAV LiDAR با سه روش مدل سازی فوق الذکر محاسبه می شود، رابطه قوی وجود دارد. هر کدام دارای مقدار R ۲ ۰٫۷۰۶، ۰٫۷۱۱ و ۰٫۷۰۳ هستند. ارزش تخمینی DBH با استفاده از دادههای فتوگرامتری پهپاد، نمودار پراکندگی بیشتری و R ۲ کوچکتر با مقادیر ۰٫۵۳۹، ۰٫۵۰۳ و ۰٫۵۲۹ به دست میدهد.
این تحقیق نشان می دهد که نزدیک ترین مقدار تخمینی برای محاسبه مقدار AGB، رویکرد برازش کره است. مقادیر AGB از ۲۰ تا ۲۲ متریک تن در هکتار برای داده های پهپاد LiDAR و ۶۱ تا ۶۲ متریک تن در هکتار برای داده های پهپاد فتوگرامتری متغیر است. این مطابق با تحقیق انجام شده توسط [ ۵۱ ] است که در آن مقدار AGB تولید شده در یک قطعه ۵٫۹ متریک تن در هکتار برای گیاهان میخک بود. در همین حال، تحقیقات [ ۵۲ ] نشان می دهد که ارزش AGB در جنگل های استوایی به طور متوسط ۹۸ تن در هکتار است. درخت مورد استفاده به عنوان نمونه در این مطالعه دارای تراکم بیشتر از مطالعه [ ۵۱ ] و کوچکتر از مطالعه [ ۵۲ ] است.
چندین مطالعه از معادلات مختلف در محاسبه زیست توده در سطح زمین مانند تحقیقات انجام شده توسط [ ۵۳ ] استفاده می کنند. این مطالعه تنها از معیارهای ارتفاع درخت برای تعیین AGB با معادله زیر استفاده کرد.
در این مطالعه، محاسبات DBH انجام شد زیرا محاسبات ارتفاع برای اعتبارسنجی دشوار بود. این به این دلیل است که درختان منطقه مورد مطالعه ارتفاعی در محدوده ۱۰ تا ۲۵ متر دارند، بنابراین انجام یک بررسی میدانی برای به دست آوردن یک مقدار ارتفاع مناسب و دقیق پیچیده است.
۵٫۵٫ اعتبار سنجی تجسمی
علاوه بر این، نتایج مدل سازی با نتایج عکس های میدانی به صورت بصری مقایسه می شود. این کار برای مشاهده کیفیت مدل سازی در یک حوزه مورد علاقه انجام می شود که به صورت بصری انجام می شود. بر اساس نتایج محاسبه مقدار R2 ، روش هارمونیک کروی بهترین مقدار را به دست میدهد، به این معنی که شکل مدلسازی نزدیکترین شکل به شکل ابرهای نقطه تشکیلشده است. در مقایسه با عکسهای هوایی منطقه مورد نظر، نتایج مدلسازی LiDAR به شکل واقعی در میدان نزدیکتر از روش فتوگرامتری است. مقایسه را می توان در شکل ۱۸ مشاهده کرد.
سپس نتایج مدلسازی که از بالا مشاهده میشوند با نتایج دیجیتالی شده به صورت دستی مقایسه میشوند تا نمای دوبعدی نتایج مدلسازی را مشاهده کنید. بر اساس نتایج مقایسه ای که در شکل ۱۹ مشاهده می شود ، مدل سازی با استفاده از داده های فتوگرامتری تفاوت چندانی با استفاده از داده های LiDAR ندارد. به این ترتیب، مدل سازی با استفاده از داده های فتوگرامتری همچنان می تواند برای اهداف تجسم انجام شود.
۶٫ نتیجه گیری و پیشنهادات
در این مطالعه، یک مدل سه بعدی از درخت منفرد در یک فضای باز سبز با فرمت CityGML ایجاد شد. گردش کار پیشنهادی انجام شده در این مطالعه از جمعآوری دادهها، تقسیمبندی ابرهای نقطه، برازش سطح روی ابرهای نقطه، محاسبه معادله برای تعیین DBH، تبدیل به فرمت CityGML و محاسبه AGB شروع میشود. این اکتساب با استفاده از روشهای فتوگرامتری UAV LiDAR و UAV انجام شد.
در قسمت تقسیم بندی، این مقاله به روش دستی تقسیم بندی را انجام می دهد. اگر منطقه ای که باید مدل سازی شود گسترده باشد، مطمئناً این کار زمان بر خواهد بود. تقسیم بندی ابرهای نقطه ای باید به صورت خودکار انجام شود تا هم در محصولات ارتوفتو و هم در محصولات ابرهای نقطه ای تقسیم بندی شوند. تقسیم بندی را می توان با استفاده از روش های یادگیری ماشینی یا یادگیری عمیق انجام داد که در حال حاضر در بسیاری از مطالعات دیگر انجام می شود. روش طبقه بندی درختی خودکار را می توان با روش طبقه بندی دستی مقایسه کرد تا دقت نتایج تقسیم بندی خودکار را مشاهده کرد.
بر اساس این تحقیق، نتایج مدلسازی ابرهای نقطهای تولید شده توسط LiDAR از دقت بهتری نسبت به ابرهای نقطه فتوگرامتری برخوردار است. نوع درخت نیز بر دقت مدلسازی تأثیر میگذارد. درختان با پوشش تاج با تراکم بالا نسبت به تاج پوشش کم تراکم دقت مدل سازی بهتری دارند. علاوه بر این، روش برازش سطح بر دقت مدلسازی تأثیر میگذارد. روش هارمونیک های کروی دقت بهتری نسبت به روش های بیضی و کروی ارائه می دهد. با این حال، مشکل مدلسازی با استفاده از روش هارمونیکهای کروی این است که زمان پردازش نسبتاً طولانی است و به یک ایستگاه کاری پیچیده نیاز دارد. علاوه بر این، داده های سه بعدی ذخیره شده در فرمت CityGML برای روش هارمونیک های کروی نیاز به اندازه ذخیره سازی بسیار بزرگی دارد به طوری که این روش برای معماری های منظری که مساحت نسبتاً کوچکی دارند مناسب است. در این میان، مدلسازی با روشهای بیضی و کره برای مناطق وسیعی مانند جنگلهای شهری و پوشش گیاهی در مناطق شهری برای انجام تحلیلهای خاص مناسب است.
محاسبه AGB با استفاده از داده های LiDAR در مقایسه با داده های فتوگرامتری بسیار بهتر است. این با مقدار AGB تولید شده توسط داده های LiDAR نشان داده می شود که در مقایسه با داده های فتوگرامتری به نتایج صحت سنجی میدانی نزدیک تر است. در کارهای آینده، یکی دیگر از روشهای اکتسابی با فتوگرامتری که میتواند برای مطالعات بیشتر مورد استفاده قرار گیرد، استفاده از یک سیستم دوربین مایل با سنسورهای متعدد است. در این سیستم می توان بخش های زیادی از داده ها را در مقایسه با روش های مرسوم بازیابی کرد تا دقت مدل سازی بهبود یابد. به این ترتیب، امید است که محاسبه مقدار AGB با استفاده از داده های فتوگرامتری بتواند دقیق تر باشد.