کلید واژه ها:
پیش بینی نقشه ; اعوجاج زاویه ای ؛ رویکرد مبتنی بر تصویر ؛ کاهش نویز ؛ اتصالات سطح
۱٫ مقدمه
۲٫ مواد و روشها
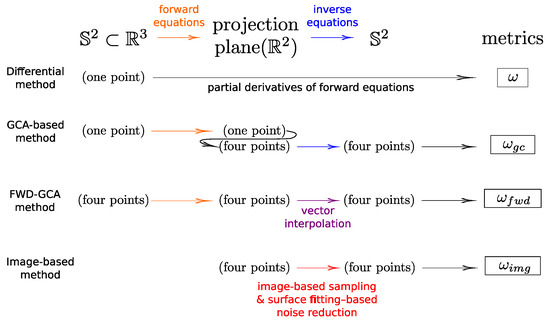
۲٫۱٫ مروری بر روش ها
۲٫۲٫ متریک مبتنی بر کمان دایره بزرگ
ابتدا بردارهای سه بعدی را محاسبه کردیم qمن، جایی که i = ۱ ، ۲، برقراری ارتباط پمن، جایی که i = ۱ ، ۲ ، ۳ ، ۴و بردارهای سه بعدی نرمال شده qˆمن، جایی که i = ۱ ، ۲. سپس طول قوس را محاسبه کردیم rمنبر اس۲، جایی که i = ۱ ، ۲.
سپس، مولفه های طول و زاویه معیارهای مبتنی بر GCA محاسبه شد.
در نهایت، ما دو جزء بالا را به عنوان یک متریک اعوجاج شکل مبتنی بر GCA ترکیب کردیم ρgجبا میانگین حسابی
اعوجاج زاویه ای ωgجپیش بینی نقشه از محاسبه شد ρgجبا استفاده از یک تابع منطقی [ ۲۰ ] با یک درجه برای پیش بینی نقشه های غیر استوانه ای، غیر مخروطی و غیرآزیموتالی.
جایی که ضریب δgجمنبا استفاده از رگرسیون مبتنی بر تابع منطقی محاسبه شد، i = ۰ ، ۲. مقادیر نامزد برای ضریب δgجمندر مطالعه قبلی به دست آمد. به این معنا که، δgج۲= ۵٫۱۳و δgج۰= ۴٫۸۲[ ۲۰ ].
برای پیش بینی های نقشه استوانه ای، مخروطی یا ازیموتال، مطالعه قبلی [ ۲۰ ] معادله ساده تری را برای محاسبه اعوجاج زاویه ای نشان داد. ωgج.
علاوه بر این، اعوجاج ناحیه مبتنی بر GCA با استفاده از آن به دست آمد
جایی که ϵ۲مساحت مربع بسیار کوچک در صفحه نمایش است آر۲.
۲٫۳٫ تبدیل مختصات مبتنی بر تصویر
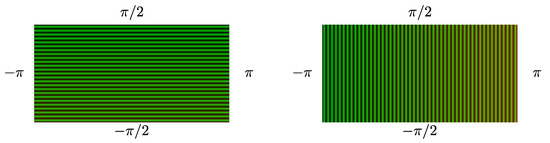
ما فرض کردیم که از دو کانال در تصاویر از پیش تعریف شده در مطالعه ما استفاده شده است و نشان داده شده است ( x ، y)به عنوان مختصات پیکسل خاص در تصویر از پیش تعریف شده عرض جغرافیایی (یا طول جغرافیایی)، (rφ،gφ)به عنوان مقادیر رنگ کانال های R و G برای ( x ، y)در تصویر عرض جغرافیایی از پیش تعریف شده، و (rλ،gλ) به عنوان مقادیر رنگ کانال های R و G برای ( x ، y)، به ترتیب در تصویر طول جغرافیایی از پیش تعریف شده. با در نظر گرفتن پروژکشن Plate Carrée مورد استفاده در تصاویر از پیش تعریف شده، رابطه تبدیل از مختصات پیکسل ( x ، y)در تصاویر از پیش تعریف شده به مقادیر رنگ (rφ،gφ)و (rλ،gλ)به عنوان ارائه می شوند
جایی که ⌊ * ⌋تابع کف است، mod ( * ، P)عملیات مدول، P یک عدد صحیح و P < ۲۵۶ است.
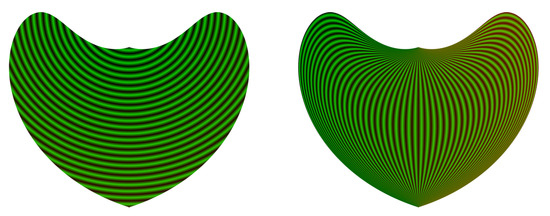
با توجه به (rφ،gφ)و (rλ،gλ)، مقادیر رنگ کانال های R و G برای یک نقطه خاص ( p , q)در تصاویر خروجی تحریف شده طول و عرض جغرافیایی (نگاه کنید به شکل ۳ ) ایجاد شده توسط نرم افزار نقشه برداری، مختصات طول و عرض جغرافیایی ( φ , λ )را می توان به دست آورد
جایی که g“φو g“λتوسط محاسبه می شوند
۲٫۴٫ کاهش نویز مبتنی بر اتصالات سطحی
ما دو تابع چند جمله ای دو متغیره با دوازده ضریب مجهول را به شرح زیر فرض کردیم:
برای تبدیل طول و عرض جغرافیایی، به ترتیب.
بعد، مختصات دو سری را جایگزین کردیم ( ۲ روز+ ۱ )۲نقاط، جایی که x = p – d، ⋯ ، p + dو y= q– د, ⋯ , q+ د، وارد دو تابع چند جمله ای بالا شده و سپس دو سیستم معادلات خطی به دست می آید:
جایی که
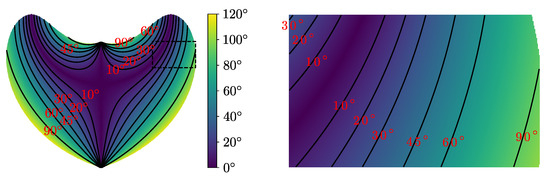
۲٫۵٫ پس از پردازش و محاسبه کانتور
۳٫ نتایج
۳٫۱٫ مروری بر پیاده سازی و آزمایش ها
۳٫۲٫ پارامترها و مصرف در آزمایشات
۳٫۳٫ کیفیت کاهش نویز با استفاده از فیتینگ سطحی
۳٫۳٫۱٫ متریک مبتنی بر دیفرانسیل به عنوان متریک مرجع
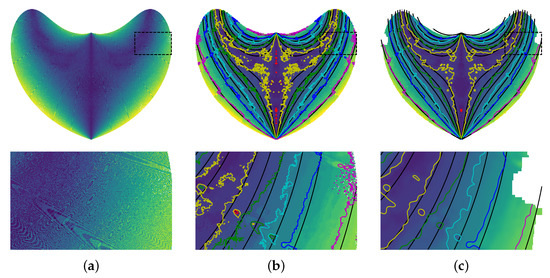
۳٫۳٫۲٫ اعوجاج زاویه ای مبتنی بر تصویر بدون کاهش نویز
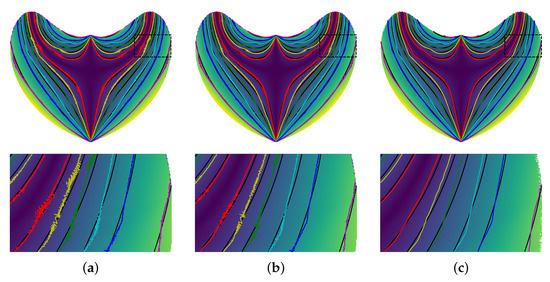
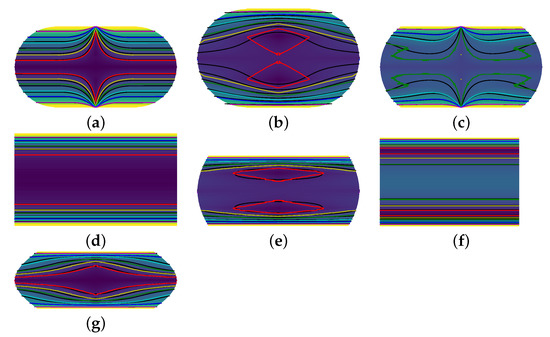
۳٫۳٫۳٫ نتایج کاهش نویز مبتنی بر فیتینگ
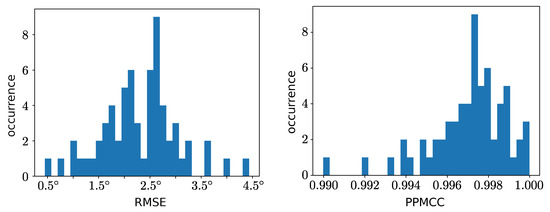
۳٫۴٫ همبستگی و تحلیل خطای معیارها
۴٫ بحث و نتیجه گیری
منابع
- اویلر، L. De Repraesentatione Superficiei Sphaericae Super Plano. Acta Acad. علمی واردات. Petropolitanae ۱۷۷۷ ، ۱۰۷-۱۳۲٫ در دسترس آنلاین: http://eulerarchive.maa.org/docs/originals/E490.pdf (در ۲۲ دسامبر ۲۰۲۱ قابل دسترسی است).
- Lapaine, M. مقاله طرح ریزی نقشه در ویکی پدیا. Adv. کارتوگر. GISci. ICA ۲۰۱۹ ، ۱ ، ۱-۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Canters, F. Small-Scale Map Projection Design ; CRC Press: Boca Raton، FL، USA، ۲۰۰۲٫ [ Google Scholar ]
- Kerkovits, K. مقایسه اندازه گیری های اعوجاج نقشه محدود و بی نهایت کوچک. بین المللی جی. کارتوگر. ۲۰۱۹ ، ۵ ، ۳-۲۲٫ [ Google Scholar ]
- Kerkovits، K. یک تفسیر مجدد آماری و ارزیابی معیارهای مورد استفاده برای اندازه گیری اعوجاج طرح ریزی نقشه. کارتوگر. Geogr. Inf. علمی ۲۰۲۰ ، ۴۷ ، ۴۸۱-۴۹۱٫ [ Google Scholar ] [ CrossRef ]
- ایوای، ی. مورایاما، Y. تجزیه و تحلیل جغرافیایی در طرح ریزی و اعوجاج نقشه توکیو INŌ در سال ۱۸۱۷٫ ISPRS Int. J. Geo-Inf. ۲۰۱۹ ، ۸ ، ۴۵۲٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کسلر، اف سی؛ Battersby، SE کار با پیشبینیهای نقشه: راهنمای انتخاب آنها . CRC Press: Boca Raton، FL، ایالات متحده آمریکا، ۲۰۱۹٫ [ Google Scholar ]
- گاسلینگ، رایانه شخصی؛ Symeonakis، E. انتخاب طرح خودکار نقشه برای GIS. کارتوگر. Geogr. Inf. علمی ۲۰۲۰ ، ۴۷ ، ۲۶۱-۲۷۶٫ [ Google Scholar ] [ CrossRef ]
- Kunimune، JH پیش بینی های نقشه جهان با حداقل خطا که توسط مش های چند بعدی تعریف شده اند. بین المللی جی. کارتوگر. ۲۰۲۱ ، ۲۱ ، ۷۸-۹۹٫ [ Google Scholar ] [ CrossRef ]
- شاوریچ، بی. جنی، بی. پترسون، تی. پتروویچ، دی. Hurni، L. یک معادله چند جمله ای برای طرح ریزی زمین طبیعی. کارتوگر. Geogr. Inf. علمی ۲۰۱۱ ، ۳۸ ، ۳۶۳-۳۷۲٫ [ Google Scholar ] [ CrossRef ]
- Baselga, S. TestGrids: ارزیابی و بهینه سازی پیش بینی های نقشه. J. Surv. مهندس ۲۰۱۹ , ۱۴۵ , ۰۴۰۱۹۰۰۴٫ [ Google Scholar ] [ CrossRef ]
- Tissot، A. Mémoire sur la Représentation des Surfaces et les Projections des Cartes géographiques ; Gauthier-Villars: پاریس، فرانسه، ۱۸۸۱٫ [ Google Scholar ]
- گلدبرگ، دی.م. Gott، JR، III. خمیدگی و چولگی در پیش بینی های نقشه زمین. کارتوگر. بین المللی جی. جئوگر. Inf. جئوویس. ۲۰۰۷ ، ۴۲ ، ۲۹۷-۳۱۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کرکوویتس، ک. محاسبه و تجسم خم شدن و چولگی. کارتوگر. من Geoinf. ۲۰۱۸ ، ۱۷ ، ۳۲-۴۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Snyder، JP Map Projections: A Working Manual ; انبار انتشارات USGS: واشنگتن، دی سی، ایالات متحده آمریکا، ۱۹۸۷٫ [ Google Scholar ]
- Laskowski، PH نگاه سنتی و مدرن به Tissot’s Indicatrix. صبح. کارتوگر. ۱۹۸۹ ، ۱۶ ، ۱۲۳-۱۳۳٫ [ Google Scholar ] [ CrossRef ]
- Capek، R. که بهترین طرح برای نقشه جهان است. در مجموعه مقالات بیستمین کنفرانس بین المللی کارتوگرافی، پکن، چین، ۶ تا ۱۰ اوت ۲۰۰۱٫ جلد ۵، ص ۳۰۸۴–۳۰۹۳٫ [ Google Scholar ]
- یان، جی. آهنگ، X. Gong, G. نسبت متوسط بین پروفایلهای مکمل برای ارزیابی اعوجاج شکل پیشبینیهای نقشه و مجموعههای سلسله مراتبی کروی. محاسبه کنید. Geosci. ۲۰۱۶ ، ۸۷ ، ۴۱-۵۵٫ [ Google Scholar ] [ CrossRef ]
- یان، جی. یانگ، ایکس. لی، ن. گونگ، G. شاخصهای مبتنی بر قوسهای دایرهای بزرگ کروی برای ارزیابی اعوجاج پیشبینیهای نقشه. Acta Geod. کارتوگر. گناه ۲۰۲۰ ، ۴۹ ، ۷۱۱-۷۲۳٫ [ Google Scholar ] [ CrossRef ]
- یان، جی. خو، تی. لی، ن. گونگ، جی. رگرسیون و ارزیابی در یک نسخه درونیابی رو به جلو از متریک اعوجاج مبتنی بر قوسهای دایره بزرگ پیشبینیهای نقشه. ISPRS Int. J. Geo-Inf. ۲۰۲۱ ، ۱۰ ، ۶۴۹٫ [ Google Scholar ] [ CrossRef ]
- راسکار، ر. ولش، جی. کاتز، ام. لیک، آ. استسین، ال. فوکس، اچ. دفتر آینده: رویکردی یکپارچه برای مدلسازی مبتنی بر تصویر و نمایشهای فراگیر فضایی. در مجموعه مقالات بیست و پنجمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، اورلاندو، فلوریدا، ایالات متحده آمریکا، ۱۹ تا ۲۴ ژوئیه ۱۹۹۸; صص ۱۷۹-۱۸۸٫ [ Google Scholar ]
- شوم، اچ. Kang, SB بررسی تکنیک های رندر مبتنی بر تصویر. در مجموعه مقالات ارتباطات بصری و پردازش تصویر ۲۰۰۰، پرث، استرالیا، ۲۰ تا ۲۳ ژوئن ۲۰۰۰٫ جلد ۴۰۶۷، ص ۲-۱۳٫ [ Google Scholar ]
- ژو، SK; جورجسکو، بی. ژو، XS; Comaniciu، D. رگرسیون مبتنی بر تصویر با استفاده از روش تقویت. در مجموعه مقالات دهمین کنفرانس بین المللی IEEE در بینایی کامپیوتری (ICCV’05)، پکن، چین، ۱۷ تا ۲۱ اکتبر ۲۰۰۵٫ جلد ۱، ص ۵۴۱-۵۴۸٫ [ Google Scholar ]
- یان، جی. گونگ، جی. انسداد شبه رنگ. در مجموعه مقالات کنفرانس شبیه سازی آسیایی، شانگهای، چین، ۲۷-۳۰ اکتبر ۲۰۱۲٫ صص ۳۲۳-۳۳۱٫ [ Google Scholar ] [ CrossRef ]
- کمیته اجرایی ICA یک برنامه استراتژیک برای انجمن بین المللی کارتوگرافی ۲۰۰۳-۲۰۱۱٫ در دسترس آنلاین: https://www.jstage.jst.go.jp/article/jjca1963/42/2/42_2_61/_pdf/-char/ja (در ۲۲ دسامبر ۲۰۲۱ قابل دسترسی است).
- چندل، آر. گوپتا، جی. الگوریتمها و تکنیکهای فیلتر کردن تصویر: بررسی. بین المللی J. Adv. Res. محاسبه کنید. علمی نرم افزار مهندس ۲۰۱۳ ، ۳ ، ۱۹۸-۲۰۲٫ [ Google Scholar ]
- کسلر، اف سی؛ Battersby، SE; فین، نماینده مجلس؛ کلارک، پیش بینی نقشه KC و اینترنت. در انتخاب طرح ریزی نقشه ; Springer: برلین/هایدلبرگ، آلمان، ۲۰۱۷; صص ۱۱۷-۱۴۸٫ [ Google Scholar ] [ CrossRef ]
- بزانسون، جی. ادلمن، ا. کارپینسکی، اس. شاه، وی بی جولیا: رویکردی تازه به محاسبات عددی. SIAM Rev. ۲۰۱۷ ، ۵۹ ، ۶۵–۹۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Evenden، GI Libproj4: کتابخانه ای جامع از توابع طرح ریزی نقشه برداری (پیش نویس اولیه). گزارش فنی؛ فالموث، MA، ایالات متحده آمریکا ۲۰۰۸٫ در دسترس آنلاین: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.620.4554 (در ۲۲ دسامبر ۲۰۲۱ قابل دسترسی است).