
دادههای رادار و LiDAR
رادار (تشخیص و برد رادیویی) و LiDAR (تشخیص و برد نور) هر دو سیستمهای سنجش از راه دور فعال هستند. برخلاف عکاسی هوایی، سیستمهای سنجش از دور چند طیفی و فراطیفی که از تشعشعات الکترومغناطیسی استفاده میکنند و به طور طبیعی از سطح زمین منعکس یا ساطع میشوند و بنابراین سنجش از دور غیرفعال نامیده میشوند، رادار و LiDAR از تشعشعات الکترومغناطیسی تهیه شده توسط خود سنسور استفاده میکنند.
سیستمهای راداری انرژی مایکروویو خود را در طول موج خاص (در محدوده ۱ تا ۳۰ سانتی متر) از طریق جو برای مدت زمان خاصی منتقل میکنند، سپس انرژی پراکنده شده از زمین را اندازه گیری میکنند. اکثر سیستمهای رادار تصویربرداری که برای سنجش از دور منابع و محیطزیست زمین استفاده میشوند، از رادار هوابرد (SLAR) استفاده میکنند که تصاویر راداری را در یک طرف خط پرواز هواپیما تولید میکند. و محیط از رادار هوابرد (SLAR) استفاده میکند که تصاویر راداری را در یک طرف خط پرواز هواپیما تولید میکند. دو نوع اصلی SLAR وجود دارد : رادار دیافراگم واقعی و رادار دیافراگم مصنوعی (SAR). رادار دیافراگم واقعی از آنتن با طول ثابت برای انتقال و دریافت سیگنال استفاده میکند. SAR از آنتن کوچک (به عنوان مثال ۱ تا ۲ متر) استفاده میکند، اما میتواند آنتن بسیار بزرگتر (به عنوان مثال ۶۰۰ متر) را شبیه سازی کند. این امر با ذخیره فازها و دامنههای پالسهای برگشتی امکان پذیر میشود که بعداً سنتز شده و آنتن بزرگ ایجاد میشود. SARها قادر به دستیابی به وضوح بسیار خوب از فواصل زیاد هستند.
تصویر راداری شدت انرژی پراکنده را که توسط زبری سطح ، میزان رطوبت و ویژگیهای دی الکتریک ویژگیهای زمین تعیین میشود، ثبت میکند. به طور کلی سطوح صاف یا خاکهای خشک پشتی بسیار کمی به سمت سنسور باز میگردانند و به صورت نواحی تاریک در تصویر رادار نمایان میشوند، در حالی که سطوح ناهموار یا خاکهای مرطوب مقدار زیادی از پراکندگی عقب را به سمت سنسور باز میگردانند و به صورت مناطق روشن ظاهر میشوند. با توجه به هندسه نمای جانبی، تصاویر راداری سایههایی را به نمایش میگذارد که ویژگیهای ظریف زمین را افزایش میدهد و میتواند سطوح زمین را برای نمایش توپوگرافی منعکس کند. مزیت اصلی رادار قابلیت کارکرد آن در تمام آب و هوا، روز و شب است که اجازه میدهد دادهها در هر زمان جمع آوری شوند. این به این دلیل است که تابش امواج مایکروویو با طول موج بلند میتواند از طریق ابر ، مه ، گرد و غبار و همه بارندگیها به جز شدیدترین بارندگیها نفوذ کند.
متفاوت از رادار ، LiDAR ابزار عمودی یا نادر است و از تابش الکترومغناطیسی در مناطق مرئی و ایمن در نزدیکی IR استفاده میکند. با این حال، یک سنسور تصویربرداری نیست. سیستم LiDAR پالسهای لیزری را ساطع میکند و زمان سفر آنها را از فرستنده به هدف در سطح زمین و برگشت به گیرنده اندازه گیری میکند (لیو، ۲۰۰۸). همانطور که سرعت پالس لیزر (نور) مشخص است، فاصله یا محدوده بین سنسور و زمین را میتوان محاسبه کرد. هنگامی که مکان سنسور را میتوان با GPS با دقت بالا تعیین کرد، میتوان محدوده را به مختصات مطلق (x ، y ، z) تبدیل کرد. در اینجا (x ، y) نشان دهنده مکان هدف است و z ارتفاع مطلق در سطح زمین است. فرآیند اندازهگیری محدوده، مجموعهای از نقاط داده ارتفاعی را تولید میکند که معمولاً به آنها نقاط جرم گفته میشود. شکل ۶-۶ نمونه ای از نقاط انبوه مربوط به زمین و تاج درخت را نشان میدهد. بنابراین، LiDAR اطلاعات را در نقاط گسسته ای که از پیکسلهای به هم پیوسته تشکیل نشده اند، ثبت میکند.
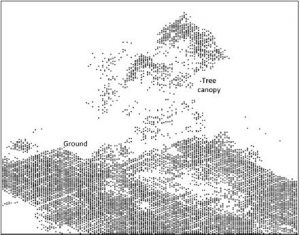
شکل ۶-۶ نقاط توده ارتفاعی LiDAR
پالس لیزری که از یک ابزار LiDAR ارسال میشود ممکن است برگشت یا چندین بازده ایجاد کند (شکل ۶-۷) اولین پالس لیزری برگشتی معمولاً با بلندترین جسم روی زمین، مانند بالای درخت یا پشت بام همراه است. بازگشت دوم ممکن است از شاخههای درخت باشد. سومین و شاید آخرین بازگشت میتواند از زمین خالی باشد. اولین بازگشت نیز میتواند نشان دهنده زمین باشد، در این صورت تنها بازگشت توسط سنسور LiDAR تشخیص داده میشود. از چندین بازگشت میتوان برای تشخیص ارتفاع چندین جسم در رد پای لیزر استفاده کرد. اولین بازده عمدتا برای ایجاد مدلهای سطح دیجیتالی استفاده میشود که شامل ویژگیهای بالای سطح زمین (مانند ساختمان ها، پلها و درختان) است. بازده متوسط به طور کلی، برای ساختار پوشش گیاهی یا جداسازی پوشش گیاهی از اجسام جامد در میان ویژگیهای سطح زمین استفاده میشود. آخرین بازده برای ساختن DEM از سطح زمین خالی استفاده میشود. دادههای LiDAR اغلب بهعنوان نقاط انبوه (x، y، z) (که دادههای ابری نقطه نیز نامیده میشوند) یا در قالب LAS که توسط انجمن فتوگرامتری و سنجش از راه دور آمریکا (ASPRS 2013) ایجاد شده است، ارائه میشوند، که ممکن است شامل بازگشتهای متعدد و همچنین شدت باشد.
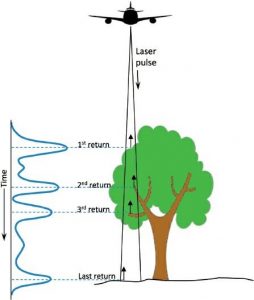
شکل ۶-۷ بازگشت چندگانه پالس لیزر از LiDAR از طریق تاج درخت