
زیست توده روی زمین، حجم و سطح پایه از مهمترین ویژگی های ساختاری در جنگلداری هستند. اندازهگیریهای مستقیم هزینهبر و زمانبر هستند، بهویژه برای جنگلهای قدیمی که ساختار پیچیدهای را روی یک توپوگرافی ناهموار نشان میدهند. ما روشی را برای بهینهسازی اندازه نمودار و سطح نمونهبرداری (کل) تعریف کردیم، که امکان تخمین ویژگیهای ساختاری با خطای قابل تحمل را فراهم میکرد. اندازه کرت با تجزیه و تحلیل نیم متغیری یک مدل CHM که از طریق اسکن لیزری پهپاد به دست آمده است، ارزیابی شد، در حالی که منطقه نمونه بر اساس محاسبه خطای نسبی مطلق به عنوان تابعی از روابط آلومتریک بود. روابط آلومتریک اجازه می دهد تا ویژگی های ساختاری از ارتفاع درختان استخراج شود. اعتبار سنجی بر اساس موقعیت تعدادی از درختان از طریق کل ایستگاه و نظرسنجی GNSS بود. از آنجایی که درختان مرتفع انتقال سیگنال GNSS را مسدود میکنند، یک استراتژی برای تسهیل موقعیتیابی این بود که راهحل را با استفاده از صورت فلکی GLONASS به تنهایی (نشان دادن بالاترین دید در طول بررسی)، و سپس استفاده از صورت فلکی GPS برای افزایش دقت موقعیت (تا حداکثر) برطرف کنیم.PDOP~ ۵-۱۰). ارتفاع درخت برآورد شده از طریق اسکن لیزری پهپاد به شدت ( r2 = ۰٫۹۸، RMSE = ۲٫۸۰ متر) با آنهایی که در محل اندازهگیری میشوند همبستگی داشتند. با فرض حداکثر خطای نسبی مطلق در تخمین ویژگی ساختاری (۲۰٪ در این کار)، روش پیشنهادی اجازه می دهد تا بخشی از سطح جنگل (≤۶۰٪) نمونه برداری شود تا برای به دست آوردن میانگین خطای پایین در مقدار کمی شود. محاسبه ویژگی های ساختاری فوق (≤۱۳%).
کلید واژه ها:
LiDAR ; سیستم جهانی ناوبری ماهواره ای (GNSS) ; تجزیه و تحلیل نیمه متغیر ; ویژگی های ساختاری ایستاده ; ارتفاع درخت ؛ زیست توده بالای زمین ; افزایش حجم سهام ؛ ناحیه پایه
۱٫ مقدمه
اکثر تکنیکهای زمینشناسی (پیمایش تراورس مرسوم و GNSS [ ۱ ]، LiDAR [ ۲ ]، فتوگرامتری [ ۳ ]، سنجش از دور [ ۴ ]، سیستمهای اطلاعات جغرافیایی [ ۵ ]) در سالهای اخیر برای توصیف جنگلها و درختان مورد استفاده قرار گرفتهاند. موقعیت های پلانیمتری به ویژه، توسعه فناوری سنجش از دور در دهه های اخیر برای کاربردهای جنگلداری انقلابی بوده است (مخفف ها و نمادها در ضمیمه A گزارش شده اند ).
مهم ترین پیشرفت به دلیل معرفی اسکن لیزری هوابرد (ALS) و اخیراً اسکن لیزری هواپیمای بدون سرنشین (UAVLS) یا اسکن لیزر بدون سرنشین (ULS) است [ ۶ ]. ALS و UAVLS با موفقیت برای اندازه گیری ارتفاع درخت [ ۷ ، ۸ ، ۹ ، ۱۰ ]، و برای تخمین طیف وسیعی از خواص تاج پوشش، از جمله قطر تاج [ ۱۱ ]، ساختار تاج پوشش [ ۱۲ ]، سطح برگ [ ۱۳ ] استفاده شده است. سوخت سایبان [ ۱۴ ]، و شکاف های سایبان [ ۱۵]. ویژگی های ساختاری جنگل مانند مساحت پایه، حجم و زیست توده بالای زمین را می توان از این اندازه گیری های مستقیم مدل یا استنباط کرد [ ۱۶ ، ۱۷ ، ۱۸ ، ۱۹ ، ۲۰ ، ۲۱ ، ۲۲ ، ۲۳ ]. ALS به طور گسترده برای کاربردهای موجود در فهرست جنگل ها مورد بررسی قرار گرفته است [ ۲۴ ، ۲۵ ، ۲۶ ، ۲۷ ، ۲۸ ]. علاوه بر این، کاربرد ALS برای تشخیص ویژگیهایی مانند ویژگیهای ساختاری جنگلهای قدیمی در حال حاضر به سرعت در حال افزایش است [ ۲۹ ، ۳۰ ، ۳۱ ،۳۲ ]. مطالعات اخیر به شدت از حفاظت از جنگل های قدیمی به عنوان یک استراتژی جهانی موثر برای مقابله با اثرات مشاهده شده و پیش بینی شده تغییرات آب و هوا حمایت کرده است [ ۳۳ ، ۳۴ ]. اکنون به خوبی شناخته شده است که جنگلهای قدیمی نقش مؤثری در حفاظت از تنوع زیستی در مقیاسهای چشمانداز و جایگاه [ ۳۵ ، ۳۶ ] و در ارائه خدمات اکوسیستمی مانند ذخیرهسازی کربن دارند [ ۳۷ ، ۳۸ ]. در ارزیابی جنگلهای قدیمی، ویژگیهای ساختاری معمولاً در مزرعه با نمونهبرداری از تعدادی قطعه مشخص میشوند [ ۲۹ ، ۳۹ ، ۴۰ ، ۴۱ .]. طراحی قطعات با اندازه ثابت، به طور تصادفی یا سیستماتیک در منطقه مورد بررسی قرار گرفته است، یک روش تلفیقی و موثر برای تخمین ویژگی های اکولوژیکی [ ۴۲ ] در نظر گرفته می شود. چندین مطالعه اثر اندازه قطعه نمونه را بر تخمین ویژگی های ساختاری جنگل تحلیل کرده اند [ ۲۲ ، ۴۳ ، ۴۴ ، ۴۵ ، ۴۶ ، ۴۷ ]. اندازه قطعه یک پارامتر کلیدی طراحی نمونه برداری است زیرا می تواند اثرات لبه بالقوه را کاهش یا افزایش دهد و بر دقت ویژگی های توده جنگلی تأثیر بگذارد [ ۴۴ ]]. رویه استاندارد در ایجاد مدلهای مبتنی بر ALS برای تخمین ویژگیهای ساختاری در سطح نمودار یا پایه اغلب از یک رویکرد نمونهگیری دو مرحلهای با اندازهگیریهای درجا و اغلب همزمان با اکتسابهای ALS استفاده میکند [ ۴۸ ]. این روش دو مرحله ای می تواند هزینه بر و زمان بر باشد، به ویژه در جنگل هایی که با ساختار و توپوگرافی پیچیده مشخص می شوند. توپوگرافی اغلب شامل شیب های تند، دره های عمیق، قله ها و رخنمون های سنگی است. به طور معمول، این شرایط در جنگل های قدیمی مدیترانه واقع در مناطق کوهستانی دور افتاده و غیرقابل نفوذ [ ۴۹ ، ۵۰ ، ۵۱ ] رخ می دهد.] با سطوح پایین دسترسی مشخص می شود. اهداف خاص ما اجرای یک روش (۱) برای تعیین اندازه کرت نماینده، با توجه به تنوع فضایی ارتفاع درختان، و (۲) برای برآورد یک منطقه نمونهبرداری که اجازه میدهد ویژگیهای ساختاری با سطح رضایتبخشی مشخص شوند، بود. دقت. در واقع، چنین رویکرد روششناختی در بررسی مناطق غیرقابل نفوذ که با سطح دسترسی پایین مشخص میشوند، اهمیت ویژهای دارد. از نظر فنی، لازم بود با محدودیت های موقعیت یابی GNSS در مناطق جنگلی کوهستانی مقابله شود. ما راهبردی را برای رفع راهحل اولیه بر اساس صورت فلکی که بیشترین تعداد ماهوارهها قابل مشاهده است، بدون توجه به اینکه به کدام صورت فلکی تعلق دارند، پیشنهاد کردیم.
۲٫ مواد
۲٫۱٫ منطقه مطالعه
این مطالعه در شمال غربی سیسیل (ایتالیا) در یک توده جنگلی قدیمی (۳۷°۵۱’۲۹″ شمالی، ۱۳°۲۵’۴۲” E) انجام شد ( شکل ۱ ). این غرفه در دره ای باریک در ارتفاعات ۱۰۰۰ تا ۱۰۵۰ متری، در معرض شمال غربی، در محدوده «Bosco della Ficuzza، Rocca Busambra، Bosco del Cappelliere، Gorgo del Drago» و بخشی از مناطق ویژه حفاظت قرار دارد. SAC) “Monti Sicani، Rocca Busambra، Bosco della Ficuzza”. این دومی در شبکه Natura 2000 (ITA020048، Habitat Directive 92/43/EC) گنجانده شده است. توده (~۱٫۲ هکتار) توسط بلوط پرزدار ( Quercus pubescens Willd.) با سایر پهن برگها مانند بلوط هولم ( Quercus ilex L.)، افرای مزرعه ( Acer campestre L.) و شاه بلوط شیرین (Acer campestre L.) غالب است.آسیاب کاستانیا ساتیوا .). حداقل ۸۰ سال است که از اختلالات طبیعی و انسانی مانند آتش سوزی، برداشت و جمع آوری چوب مرده فرار کرده است. در این دوره، توده به سمت مراحل رشد متوالی با سطوح بالایی از پیچیدگی ساختاری، از جمله تاج پوشش چند لایه، شکاف های تاج پوشش ایجاد شده توسط مرگ و میر درختان، درختان بزرگ کهنسال، و تجمع چوب مرده ایستاده و خوابیده [ ۵۲ ] حرکت کرد. زیست اقلیم مدیترانه ای فصلی-اقیانوسی مدیترانه ای با ترموتیپ مزومیترانه ای و آمبروتیپ زیر مرطوب است [ ۵۳ ]. خاک ها را می توان به عنوان لپتوسول [ ۵۴ ] طبقه بندی کرد ( https://www.fao.org/3/i3794en/I3794en.pdf ، در ۱۱ فوریه ۲۰۲۲ مشاهده شد). با توجه به رویکرد دسترسی به جنگل [ ۵]، منطقه مورد مطالعه به عنوان به سختی قابل دسترسی طبقه بندی شد.
۲٫۲٫ داده های ویژگی های ساختاری جنگل
یک بررسی میدانی در ماه مه ۲۰۱۶، روی توده جنگلی کهنسال، شامل درختان بزرگ کهنسال، درختان خشکیده، درختان خوابیده و تکیه دار، و همچنین شکاف های تاج پوشش ( شکل ۲ ) انجام شد. ما قطر را در ارتفاع سینه ( DBH ، m) و ارتفاع ( H ، m) درختان زنده اندازهگیری کردیم. دادههای مرجع میدانی برای استخراج ویژگیهای تک درختی مانند مساحت پایه ( G ، m2 )، حجم در حال رشد سهام ( V ، m3 )، و زیست توده بالای زمین ( AGB ، Mg) استفاده شد.
در مجموع ۴۱۳ درخت متعلق به ۱۱ گونه سرشماری شد که از این تعداد ۱۰۰ درخت بزرگ کهنسال با DBH > 0.04 متر بودند. V ، G و AGB در هکتار به ترتیب ۲۹۳٫۵ مترمکعب ، ۲۷٫۸ مترمربع و ۲۲۷٫۲ میلی گرم در هکتار برآورد شد. درختان کهنسال بزرگ ۷۱ درصد از V ، ۶۰ درصد از G و ۶۹ درصد از AGB را تشکیل می دهند.
توجه داشته باشید که در جنگلهای برگریز طبیعی، مانند تودههای جنگلی قدیمی ما، نرخ تشخیص درخت در محل توسط ساختار تاج پوشش متراکم کاهش مییابد. علاوه بر این، قسمت بالای درخت اغلب با موقعیت درخت در ارتفاع سینه مطابقت ندارد. این مورد برای شکل نامنظم تاج پوشش و تکیه درختان ( شکل ۲ a,b) از داده های ALS [ ۵۵ ] است.
توانایی ALS برای ثبت درختان سرکوب شده و خوابیده توسط بالاترین لایه تاج پوشش محدود شده است [ ۱۰ ، ۲۱ ]. علاوه بر این، شناسایی دقیق مکانهای بالای درخت از ابرهای نقطهای میتواند برای درختان میانی و سرکوبشده چالشبرانگیز باشد، حتی با بازرسیهای انسانی [ ۱۰ ]. بنابراین، درختان سرکوب شده از تجزیه و تحلیل زیر حذف شدند. ۲۷۶ درخت بهدستآمده، که بهعنوان تاج غالب، همزمان و میانی طبقهبندی شدند، بهعنوان دادههای میدان مرجع استفاده شدند و با درختهای شناساییشده با ALS مطابقت داده شدند.
۲٫۳٫ داده های اسکن لیزری با پهپاد
دادههای پهپاد در ۴ می ۲۰۱۶ تحت شرایط برگرو با استفاده از نقشهبردار YellowScan، نصب شده بر روی یک سیستم هوایی کنترل از راه دور، با مشخصات فنی زیر جمعآوری شد: هشتکوپتر با قطر ۱٫۸ متر، مشخصشده توسط یک سیستم موقعیتیابی جهانی (GPS) ناوبری، برخاستن و فرود خودکار YellowScan Mapper یک لیزر کلاس ۱ است که در مادون قرمز نزدیک (در ۹۰۵ نانومتر) کار می کند. دقت مطلق پلانیمتری سیستم یکپارچه ۰٫۱۰ متر + ۱٪ از ارتفاع پرواز، دقت عمودی ۰٫۱۰ متر + ۰٫۵٪ از ارتفاع کسب است، در حالی که دقت ۱۰ سانتی متر است. وضوح برد ۴ سانتی متر است. ابزار LiDAR با یک سیستم ناوبری اینرسی داخلی (INS) و گیرنده GPS+ (GPS به علاوه GLONASS، Global’naja Navigacionnaja Sputnikovaja Sistema) که در سینماتیک بلادرنگ (RTK) به دست میآید ادغام شد.۵۶ ]. این پهپاد تا ارتفاع ۵۰ متری بالای درختان کار می کرد و حداکثر سه بار برگشت را در هر پالس لیزر ثبت می کرد. محدوده زاویه اسکن ۵۰± درجه بود. منطقه اسکن شده از هفت نوار موازی و تا حدی همپوشانی تشکیل شده بود که با سرعت پرواز ≈۰٫۵ متر بر ثانیه به دست آمد و منجر به مدت زمان اکتساب ۳۵ دقیقه شد. نوارها به عنوان S1-S7 از شمال به جنوب برچسب گذاری شدند.
۲٫۴٫ بررسی های توپوگرافی و سریع
فاز توپوگرافی شامل یک تراورس بسته از معیارهای GNSS همراه با یک بررسی خط شعاعی بود. یک GNSS Topcon Hiper-Pro، هر دو GPS و GLONASS، دریافت کننده در فرکانس دوگانه و مجهز به یک کنترلر FC-100، برای بررسی استاتیک دو نقطه عطف مرجع استفاده شد، در حالی که برای بررسی تراورس بسته، یک ایستگاه کل Leica TPS 1105 استفاده شد. (هگزاگون AB، سوئد) و منشورهای زاویه راست توپوگرافی استفاده شد. این سیستم با دقت اندازه گیری زاویه ۳ اینچ (۱ مگون) و دقت اندازه گیری فاصله (سنسور مادون قرمز، IR) (ISO 17123-4) در حالت استاندارد ۲ میلی متر مشخص می شود.
نرم افزار تجاری برای موقعیت جغرافیایی توپوگرافی درختان به شرح زیر بود:
- –
-
ابزارهای MAGNET و Topcon Tools نسخه ۸٫۲٫۳، توسعه یافته توسط Topcon Corporation (توکیو، ژاپن). این نرمافزار پردازش دادهها را از دستگاههای مختلف مانند ایستگاههای کل، سطوح دیجیتال و گیرندههای GNSS امکانپذیر میکند و در اکثر برنامههای فنی-علمی مورد استفاده قرار میگیرد [ ۵۷ ، ۵۸ ، ۵۹ ]. Topcon Tools شامل مدلهای مختلفی برای تصحیح تروپوسفر میشود، مانند مدل اصلاحشده هاپفیلد [ ۶۰ ، ۶۱ ، ۶۲ ] با مدل هواشناسی NRLMSISE، بهطور گسترده، مدل رادار پراکنده ناهمدوس طیفسنج جرمی آزمایشگاه تحقیقات دریایی ایالات متحده [ ۶۳ ].]. پردازش خط پایه می تواند با صورت فلکی GPS یا GLONASS یا ترکیبی از این دو (GPS+) انجام شود.
- –
-
مریدیانا نسخه ۲۰۲۰، توسعه یافته توسط Geopro (Topcon Positioning Italy، Ancona، ایتالیا). این ابزار اجازه می دهد تا تطابق جغرافیایی تجزیه و تحلیل شود و نقاط پرت کل داده های ایستگاه با فرض مجموعه ای از تلورانس ها بررسی شود. بسته به دادههای موجود، نرمافزار از روشهای محاسباتی زیر استفاده میکند: روتو-ترجمه (سخت یا حداقل مربع، با ضریب مقیاسگذاری ثابت یا متغیر)، Snellius و Ex-center.
- –
-
تعداد نظری ماهواره ها، برای زاویه قطع داده شده، با استفاده از نرم افزار برنامه ریزی آنلاین Trimble GNSS [ ۶۴ ] محاسبه شد.
مرحله سریع شامل برخی بررسی های خط شعاعی با استفاده از هیپسومتر و قطب نما بود. در واقع، دوازده نشانه مرجع اضافی در منطقه قرار داده شد، و مختصات آنها با استفاده از گیرنده Recon N324 GNSS (توسط Trimble Inc.، Sunnyvale، کالیفرنیا، ایالات متحده) تعیین شد (دقت ≈۲ متر در روش مطلق). نشانهها هم در گوشهها و هم در وسط هر ضلع و همچنین در شکافهایی که در داخل منطقه رخ میدهد، روی مرز قرار میگرفتند. این اجازه می دهد حداکثر فاصله بین درختان و نزدیکترین نقطه عطف (≤۳۰ متر) محدود شود. مختصات درختان زنده با ثبت فاصله افقی و قرائت های آزیموت برای هر درخت از نزدیکترین نقطه عطف، با استفاده از هیپسومتر Vertex IV (Haglöf، Långsele، سوئد) و Tandem/360PC/360R DG Clino/Compass (Suunto، Vantaa) تعیین شد. ، فنلاند).
۳٫ روش ها
۳٫۱٫ جمع آوری داده ها
بررسیها شامل توصیف ساختاری جنگل و همچنین موقعیت درخت بود.
DBH و H درختان زنده > 0.03 متر به ترتیب با استفاده از کولیس (سیلوانوس نوع ۱۲۰۸) و هیپسومتر اندازه گیری شد [ ۶۵ ]. ما همچنین گونهها و تاجهای درخت را بهعنوان غالب، همغلط، میانی یا سرکوبشده طبقهبندی کردیم [ ۶۶ ]. معادلات آلومتریک مخصوص گونه برای پیش بینی V و AGB [ ۶۷ ] که ترکیبی از DBH و H هستند استفاده شد.
برای موقعیت یابی توپوگرافی درختی، انتخاب یک تکنیک خاص به جای روش دیگر به عوامل مختلفی بستگی دارد. برخی از محدودیت ها را می توان با ادغام تکنیک های مختلف ژئوماتیک، به عنوان مثال، کل ایستگاه و بررسی های GNSS غلبه کرد.
در واقع، در حالی که طبق گفته Meyer و همکاران، همیشه می توان از رویکردهای توپوگرافی کلاسیک مانند تراورس معمولی (با کل ایستگاه ها) استفاده کرد. [ ۶۸ ] استفاده از موقعیت یابی GNSS با تأثیر سایبان، که به طور طبیعی آسمان را مسدود می کند و جذب سیگنال را کاهش می دهد، کاهش می یابد. عوامل بسیاری مسئول کاهش دقت در موقعیتیابی درختان جنگلی هستند، از جمله چند مسیر، لغزش چرخه، نسبت سیگنال به نویز کم ( SNR ، -)، و رقت کم دقت ( DOP ، -).
امکان سنجی نقشه برداری در حالت سینماتیک GNSS حذف شد، زیرا حتی با کمک سیستم های میکرو الکترومکانیکی (MEMS)، اجازه می دهد تا دقت افقی بالاتر از ۱۵-۵۰ متر به دست آید [ ۶۹ ]. علاوه بر این، سیگنال ضعیف GSM در منطقه مورد مطالعه منجر به کنار گذاشتن استفاده از حسگرهای تلفن همراه ارزان قیمت شد، اگرچه با توجه به توسعه تکنولوژیکی این حسگرها [ ۷۰ ، ۷۱ ]، استفاده از آنها به طور فزاینده ای در حال گسترش است. از آنجایی که موقعیت پلان سنجی درختان به در دسترس بودن و کیفیت سیگنال GSM بستگی دارد، دقت های به دست آمده توسط نویسندگان در محدوده ۵-۱۵ متر است. فن و همکاران [ ۷۲]، از سوی دیگر، با تجهیز تلفن همراه به یک MMS اضافی با عمق آبی قرمز (RGB-D) MMS (SLAM)، گزارش داد که می تواند درختان را با دقت زیر متر تعیین کند.
بنابراین، بر اساس [ ۷۳ ، ۷۴ ]، و بر اساس Valbuena و همکاران، تصمیم گرفته شد تا برخی از نقاط کنترل جنگل بررسی شود . [ ۷۵ ]، یک بررسی تراورس بسته از معیارهای GNSS زیر تاج با یک بررسی خط شعاعی استفاده شد که به محور تعدادی از درختان اجازه میدهد در ارتفاع سینه قرار گیرند.
با توجه به اصلاح دیفرانسیل دادههای GNSS، برنامهها از ایستگاههای مرجع با کار مداوم (CORS) برای موقعیتیابی سهبعدی بهرهمند شدهاند. کاربردهای علمی و فنی شبکه های CORS برای موقعیت یابی بلادرنگ (شبکه سینماتیک بلادرنگ (NRTK)) و همچنین برای پس پردازش داده ها توسعه یافته است. در واقع، شبکه GNSS CORS با استفاده از رویکردهایی مانند ایستگاه مرجع مجازی (VRS)، پارامتر Flächen-Korrektur (FKP)، یا ایستگاه چند مرجع (MRS) امکان دریافت یک تصحیح دیفرانسیل قابل اعتماد را فراهم کرد.
دانشگاه پالرمو (UNIPA) یک شبکه GNSS CORS را در بخش غربی سیسیل (ایتالیا) اجرا کرد که دادههای روزانه را در قالب تبادل مستقل گیرنده (RINEX) (با نرخ ۳۰ اینچ) و دادههای خام ساعتی (با نرخ ۱ اینچ) ارائه میدهد. این شبکه از هشت CORS تشکیل شده است که نزدیک به ۷۴۰۰۰۰ هکتار، مجهز به GPS Topcon NET G-3 و گیرنده های فعال GLONASS هستند [ ۷۶ ]. داده های آن برای ادغام منطقه ای راه حل های شبکه متراکم ملی GNSS بلند مدت در اروپا استفاده شده است [ ۷۷ ]. همچنین برای محاسبه شبکه ملی پویا ( Rete Dinamica Nazionale (RDN2)) شبکه دائمی EUREF (EPN) در ایتالیا استفاده شده است. این زیرشبکه توسط موسسه جغرافیایی نظامی ایتالیا ( Istituto Geografico Militare Italiano ) مدیریت می شود(IGMI)).
تجزیه و تحلیل های اولیه [ ۷۶ ] اجازه داد تا خدمات عملیاتی آن و کیفیت داده های ثبت شده در طول اولین دوره آزمایش (۲۰۰۸-۲۰۱۲) تأیید شود. داردانلی و همکاران [ ۷۸ ] روش های مختلف نظرسنجی را برای بررسی همخوانی راه حل ها مقایسه کردند. موقعیتیابی NRTK با روشهای مختلف (VRS، FKP، و نزدیکترین ایستگاه) بهدست آمد و یک راهحل دقیق موقعیتیابی نقطهای با دو نرمافزار علمی مختلف، یعنی RTKLIB و سیستم مرجع فضایی کانادایی، موقعیتیابی دقیق نقطه (CSRS-PPP) محاسبه شد. از جمله روش های NRTK تست شده در داردانلی و همکاران. [ ۷۸ ]، VRS کمترین اختلاف میانگین را با حل استاتیک نشان داده است. بنابراین، VRS در این مطالعه موردی به کار گرفته شد.
زمان اشغال GNSS Topcon Hiper-Pro 90′ ( شکل ۲ a) با نرخ ۱ اینچ بود، با زاویه برش ثابت روی ۱۵ درجه. چهار خط پایه (پانل b) نشانه های مرجع را با CORS واقع در Prizzi (PRIZ، طول خط پایه = ۱۹۸۹۰ متر، شکل ۳ ) و پالرمو (PALE، طول خط مبنا = ۲۶۲۷۰ متر) متصل کردند. حالت موقعیت یابی مورد استفاده در ابزار Topcon دیفرانسیل مبتنی بر کد (CODE DIFF) بود. متریک رقیقسازی موقعیت دقیق (PDOP) و همچنین تعداد ماهوارههای GPS و GLONASS گزارش شد. PDOP با توجه به مقیاس داده شده توسط Mikulski [ ۷۹ ] ارزیابی شد. بر اساس کیسام [ ۸۰ ]، تراورس شامل تنظیم حداقل مربعات در سه تکرار بود.
۳٫۲٫ پردازش داده های پهپاد
داده های پهپاد با استفاده از نرم افزار بسته LAStools (rapidlasso GmbH) و QGIS (تیم توسعه QGIS) نرم افزار منبع باز پردازش شد. این روش شامل چندین مرحله بود: (من) ابتدا تمام ابرهای نقطه ای که منطقه مورد مطالعه را پوشانده بودند، با استفاده از ابزار lasmerge (بسته LAStools) در یک لایه ادغام شدند. (ii) سپس، موزاییک با ادغام نوارهای S1 به S7 به دست آمد. (iii) در مرحله بعدی، فیلتر کردن و طبقهبندی اجازه میدهد نقاط پرت و پر سر و صدا به دلیل، برای مثال، پراکندگی پسانداز توسط اجسام پرنده (نقاط پایین، منزوی و هوا) حذف شوند و نقاط مربوط به زمین و پوشش گیاهی فوق جدا شوند. (lasnoise با گزینه wilderness and lasground tools)؛ (IV) پس از طبقه بندی ابر به نقاط زمینی و غیر زمینی، ارتفاع درخت برای هر نقطه از سطح زمین با استفاده از ابزار lasheight محاسبه شد. (v) ابر نقطه بر روی یک شبکه منظم با استفاده از ابزار las2dem درون یابی شد، بنابراین مدل زمین دیجیتال تولید شد (DTM ، m) و مدل سطح دیجیتال ( DSM ، m). DTM از آخرین بازگشت ها (نقاط زمینی) ایجاد شده است، در حالی که DSM فقط از بازده های اولیه (نقاط غیر زمینی) ایجاد شده است. vi) در نهایت، مدل ارتفاع تاج پوشش ( CHM ، m) پیکسل به پیکسل با تفاوت مدلهای DSM و DTM محاسبه شد [ ۸۱ ].
چگالی برگشتی در هر متر مربع برای تمام خطوط اسکن در یک شبکه منظم، و همچنین چگالی برگشتی اول و سوم نقاط ادغام شده، ارزیابی شد. بر اساس این توضیح اخیر، ما رابطه بین تراکم نقاط متعلق به منطقه بین دو خط کانتور و مقادیر میانگین ارتفاع و شیب را ارزیابی کردیم. ما فواصل در ارتفاع ۵ متری (از ۱۰۰۵ تا ۱۰۳۵ متر) را انتخاب کردیم.
ارتفاع درختان ( H CHM ، m) توسط CHM با استفاده از QGIS استخراج شد، در حالی که DSM برای تعیین موقعیت درخت از دادههای ALS استفاده شد. موقعیت درختان غالب، هم غالب و میانی با بررسی شیب های پوچ (حداکثر آستانه ۰٫۲٪ تعیین شد) و انحناهای منفی متمایز شد.
۳٫۳٫ تجزیه و تحلیل نیمه متغیری
ارتفاع درخت یکی از پارامترهای اصلی ساختاری جنگل است. الگوی خودهمبستگی فضایی آن را می توان با تجزیه و تحلیل نیم متغیره بررسی کرد [ ۸۲ ، ۸۳ ، ۸۴ ]. semivariogram وابستگی فضایی بین ارتفاعات نمونه را اندازه گیری کرد. این به عنوان مجموع مجذور اختلاف ارتفاعات بین تمام جفت نقاط متعلق به یک کلاس مشخص از فاصله محاسبه شد [ ۸۲ ]. یک نیمه متغیر معمولاً با اثر قطعه، آستانه و محدوده مشخص می شود [ ۸۵ ، ۸۶]. در این نرم افزار، اثر قطعه، نیمه واریانس ارتفاع درختان را در فاصله تاخیر نزدیک به صفر منعکس می کند. آستانه مقدار حداکثر واریانس یک جزء مدل است که یک مجانب افقی را نشان می دهد. طول فاصله تاخیری است که در آن نیمه واریانس به آستانه می رسد و منعکس کننده ویژگی های مقیاس داده ها در منطقه است. برای تعیین اندازه قطعه بهینه برای تخمین ویژگیهای ساختاری جنگل، طول نیمواریوگرامها برای هر دو ارتفاع درخت اندازهگیری شده در محل با هیپسومتر محاسبه شد و با پردازش مدل CHM به دست آمد. با نمونهبرداری از نموداری از ابعاد مساوی (یا بیشتر از) طول نیمواریوگرام، منطقهای را که با حداکثر نیمهواریانس مشخص میشود، حداقل برای اجزای مدل که مجانبی افقی را نشان میدهند، نمونهبرداری کردیم. در واقع، اگر جزء خطی نیمه واریانس رخ دهد، لازم است تعداد (کافی) قطعه نمونه برداری شود تا به نماینده منطقه برسد. Semivariograms با استفاده از Surfer توسط Golden Software LLC محاسبه شد.
۴٫ نتایج و بحث
۴٫۱٫ تعیین موقعیت درختی از طریق GNSS CORS و Total Station
پس از بررسی همپوشانی داده ها از دو ایستگاه دائمی PRIZ و PALE و دو نقطه عطف مرجع ( شکل ۳ ب)، توجه به ارزیابی موقعیت PDOP معطوف شد ( شکل ۴ ).
PDOP عالی [ ۷۹ ] (<3) برای دو CORS بود، که مطابق با الزامات EPN در مکانهای مناسب با دید ماهوارهای خوب تحقق یافت، در حالی که برای دو نقطهی شاخص مرجع، مقادیر PDOP متوسط تا ضعیف، عمدتاً بین ۵ بود. و ۱۰ ( شکل ۴ ب). این PDOPمقادیری که استانداردها را برآورده نمیکردند، به دلیل دریافت سیگنال ضعیف بود که مشخصه اکتشافات در جنگل بود، جایی که وجود درختان بسیار بلند و درختان نزدیک به یکدیگر (ارتفاع تا ۳۲ متر، با فاصله متوسط و استاندارد). انحراف برابر با ۲٫۵ ± ۴٫۳ متر و حداکثر فاصله برابر با ۱۳٫۴ متر) انتقال سیگنال ماهواره ها را مسدود کرد. دید بهتر صورت فلکی GLONASS ( شکل ۵ ) نسبت به GPS ( شکل ۶ ) نیز در طول پنجره زمان اندازه گیری یافت شد.
نرم افزار قادر به رفع مشکل با استفاده از GPS در ابتدا نبود، بنابراین طبق گفته داردانلی [ ۸۷]، راه حل در ابتدا با استفاده از صورت فلکی GLONASS به تنهایی، که در دسترس تر بود، ثابت شد، و سپس استفاده از سیگنال GPS باعث شد تا دقت مختصات نشانه های مرجع بهبود یابد (تا دقت سانتی متری) در دوره مشاهده کوتاه. (۸۰′). حداکثر تعداد ماهواره برای موقعیت داده شده، دوره اندازه گیری، و برش ارتفاع بیش از حد تحمیل شده بود (خط قرمز چین). نشان داده شد که تعداد قابل مشاهده ماهواره ها در ارتفاع گیرنده (۲ متر) بسیار کمتر از تعداد ماهواره های بالقوه موجود است. طول موج موج حامل در واقع فقط تا حدی از سیستم تنه-شاخه-سایبان عبور می کند (طول موج در محدوده ۱۸٫۷۱-۲۳٫۷۹ سانتی متر برای GLONASS و در محدوده ۱۹٫۰۳-۲۴٫۴۲ سانتی متر برای ماهواره های GPS). تعداد ماهواره های GLONASS به طور بالقوه در دسترس کمتر از GPS بود. با این حال، کاهش تعداد ماهوارههای قابل مشاهده در زیر تاج برای GPS قویتر از صورت فلکی GLONASS بود. این منجر به تعداد بیشتری از ماهوارههای GLONASS نسبت به GPS شد. علاوه بر این، مورفولوژی ناحیه کوهستانی مانع از دید ماهوارهها در برخی بخشهای ازیموتالی میشود تا زمانی که ماهوارهها به حداقل زاویه ارتفاع دست پیدا کنند.۸۸ ]. در واقع، در بخش های ۵۰-۱۳۰، ۱۵۳-۱۷۳، و ۲۳۸-۲۵۱ درجه (در جهت عقربه های ساعت از شمال)، ماهواره ها در بالای ارتفاع ۲۲ درجه کاملاً قابل مشاهده شدند.
بنابراین، بررسی خط شعاعی که نشانههای مرجع GNSS V1 و V2 (زیر تاج پوشش) را به هم مرتبط کرد، به درختان در سیستم مرجع انتخابی اجازه میدهد تا قرار بگیرند (منطقه CRS ETRF2000-RDN2008 UTM 33N-EPSG: 6708 پیشبینی شده) طبق Valbuena و همکاران. [ ۷۵ ]. ریشه اشتباه میانگین مربعات خطا (RMSE) برای هر دو محاسبات پلان سنجی و ارتفاعی سانتی متر بود.
دوازده درخت، که از یک معیار واقع در مرز شمالی منطقه مورد مطالعه (V1 بررسی تراورس بسته) قابل مشاهده بودند، با استفاده از یک بررسی خط شعاعی در طول ایستگاه کل قرار گرفتند. فاصله ها با اشاره به بازتابنده ای که روی تنه درخت در ارتفاع سینه قرار گرفته بود اندازه گیری شد. این موقعیت های توپوگرافی به آن اجازه می دهد تا مشخص شود که آیا آنهایی که از طریق بررسی سریع تعیین می شوند برای مقایسه با مراکز درختان قابل استنباط از بررسی ALS قابل اعتماد هستند یا خیر.
۴٫۲٫ آمار LIDAR و دقت موقعیت یابی توپوگرافی درختان
این بخش آماری را در مورد فایل پهپاد ادغام شده گزارش می کند و سپس دقت در موقعیت یابی درختان را با بررسی GNSS و ایستگاه کل در مقایسه با آنچه با بررسی سریع به دست آمده و همچنین دقت ارتفاع درختان به دست آمده را تجزیه و تحلیل می کند. از اسکنرهای لیزری در مقابل اسکنرهای اندازه گیری شده در محل.
تراکم نقطه (نقاط در متر مربع) هر نوار در شکل ۷ گزارش شده است (نوارهای S1 تا S7 به ترتیب از پانل b تا h). حداکثر تراکم برای نوارهای S1 تا S7 به ترتیب ۱۵۰، ۲۴۵، ۲۰۵، ۶۰۲، ۱۶۷، ۲۰۵، و ۲۴۴ نقطه m -۲ بود. مقیاس رنگ برای حداکثر دامنه تنوع (۱-۶۰۲، S4) تنظیم شد. یک مقیاس رنگی واگرا با تعداد مساوی ۵ کلاس اتخاذ شد. مقیاس رنگ کوررنگ ایمن و سازگار با چاپ بود.
هنگامی که نوارها ادغام شدند، تعداد اولین بازده ها ۱،۱۵۹،۰۶۳ بود، در حالی که تعداد بازده های میانی (۵۱۴۰) درصد کمی (۰٫۴٪) از اولین ها بود. در عوض، تعداد آخرین بازده ها (۱,۱۵۵,۶۶۷) تقریباً همان تعداد بازده های اول (۹۹٫۷٪) و کمی بیشتر از تعداد بازده های منفرد (۱,۰۱۰,۵۴۶، ۸۷٫۲٪ از اولین ها) بود. تراکم نقطه همه برگشت ها ۱۲۲٫۶۴ نقطه بر متر مربع بود، در حالی که فاصله همه برگشت ها ۰٫۰۹ متر بود. با در نظر گرفتن چگالی متوسط بازده، وضوح فضایی ≈۵ برابر بیشتر از فاصله باید منجر به خطای استانداردی از میانگین نه بیشتر از ~۲۰٪ از انحراف استاندارد نقاط تولید کننده مقدار پیکسل شود. بنابراین، وضوح فضایی برای مدل DSM روی ۰٫۵ متر تنظیم شد. سپس همان وضوح فضایی برای مدل DTM انتخاب شد.
بازده های اول ( شکل ۸ الف) از طریق یک مقیاس رنگی واگرا با تعداد مساوی ۵ طبقه ای نشان داده شد. تمام بازگشت های سوم متعلق به کلاس اول (پانل b) بود. چگالی آنها به صورت خطی با میانگین ارتفاع (۷۴/۰ = r ۲ ) و همچنین با شیب متوسط ( ۵۴/۰ = r ۲ ) افزایش یافت. بازده اول هیچ روندی را نشان نداد.
موقعیت درختان تعیین شده از طریق بررسی توپوگرافی در شکل ۹ a (نقاط) گزارش شده است. فاصله بین درختان تعیین شده از طریق بررسی سریع و از طریق بررسی توپوگرافی مقدار متوسط ۴٫۷۱ متر با خطای استاندارد ۰٫۷۳ متر را نشان داد. این مقدار متوسط بزرگتر از دقت مطلق پلانیمتری سیستم یکپارچه YellowScan Mapper بود که ۰٫۶ متر در ارتفاع پرواز (۵۰ متر) بود. با این حال، با توجه به عدم قطعیت های ناشی از ناهمگنی (i) اندازه تاج درختان غالب (که با شعاع متوسط μ = ۳٫۲۴ متر با خطای استاندارد σ μ = ۰٫۱۲ متر مشخص می شود). (ب) خروج از مرکز تاج (μ = ۰٫۸۴ متر، σ μ = ۰٫۰۱ متر). و (iii) تکیه درخت (μ = ۲۳ درجه، σ μ= ۲٫۵ درجه) و ارتفاع درخت (μ = ۱۶٫۵ متر، σ μ = ۰٫۳۸، حداکثر ارتفاع = ۳۲٫۴ متر)، مشخص شد که دقت موقعیت یابی سریع را می توان قابل قبول در نظر گرفت.
درختان زنده غالب، هم غالب و میانی به عنوان نقاطی به مدل CHM قرار گرفتند ( شکل ۹ a). شکاف های ناشی از پاکسازی با رنگ خاکستری مشخص شده است. شکاف هایی در جایی که درختان خشکیده روی زمین قرار داشتند ظاهر شد.
ارتفاعات از جنوب غربی به شمال کاهش می یابد (از ۱۰۳۴ تا ۱۰۰۸ متر). بالاترین مقادیر H CHM (تا ۳۲٫۴ متر) در بخش جنوب شرقی رخ داد، در حالی که ارتفاعات پایین تر (~ ۲٫۵ متر) در بخش شمال غربی رخ داد.
سپس ارتفاع درخت اندازهگیری شده در محل با این روش آخر با مقدار H CHM نزدیکترین پیکسل که با شیب تقریباً صفر و انحنای منفی مشخص میشود، مقایسه شد ( شکل ۹ ب). H CHM یک همبستگی بسیار قوی [ ۸۹ ] (ضریب تعیین r ۲ = ۰٫۹۸) با ارتفاع درختان اندازه گیری شده در محل نشان داد، با میانگین دست کم برآورد ۶٪ (افزایش برابر با ۰٫۹۴). ریشه میانگین مربعات خطا در اطراف خط روند خطی ۲٫۸۰ متر بود. این مقدار بزرگتر از دقت مطلق عمودی سیستم یکپارچه بود که در این اکتساب ۰٫۳۵ متر بود.
۴٫۳٫ تجزیه و تحلیل نیمه متغیری
یک تجزیه و تحلیل نیم متغیری اجازه می دهد تا تغییرپذیری پلانیمتری ارتفاع درختان از هر دو مقدار CHM و H کمی سازی شود ( شکل ۱۰ و شکل ۱۱ ، به ترتیب). پارامترهای اجزاء در جدول ۱ گزارش شده است.
نتایج نشان داد که نیمه متغیرهای تجربی (خط سیاه با نقاط سیاه) در هر دو مورد به خوبی با نیمه متغیرهای نظری (یک پانل، خط آبی) متشکل از اجزای درجه دوم و خطی (به ترتیب پانل های b و c) و همچنین از یک قطعه قابل تفسیر هستند. اثر
نیمه متغیرهای تجربی H نسبت به CHM کمتر یکنواخت بود ، که احتمالاً به دلیل تعداد کمتر مجموعه داده است. نیمه واریانس ابتدا به صورت خطی و ناگهانی به دلیل تغییر قابل توجه ارتفاع درختان در فواصل کوتاه رشد کرد، تا زمانی که یک فاصله تاخیری که در آن زانو رخ داد. سپس، برای فواصل تاخیری طولانیتر، نیمهواریانس به صورت خطی افزایش مییابد، هرچند با شیب کمتر.
همانطور که در جدول ۱ گزارش شده است ، هر دو نیمه متغیر با رفتار ناهمسانگرد مشخص شدند. به منظور سادگی، با هدف پیشنهاد یک روش نمونهگیری برای اعمال در میدان، ترجیح دادیم از اثرات ناهمسانگردی در قطعههای نمونهبرداری غفلت کنیم. در واقع، هر معیار نمونهگیری که رفتار ناهمسانگردی را محاسبه میکند، در یک سناریوی عملیاتی دشوار خواهد بود. مولفه خطی ارتفاع درختان را در جهت جنوب به جنوب غربی منعکس می کند که تقریباً جهت حداکثر شیب را تشکیل می دهد. در واقع، حداکثر شیب بین ضلع جنوبی و شمالی منطقه مورد مطالعه ۰٫۲۹ در ۵ درجه در جهت عقربه های ساعت از شمال بود. مولفه های درجه دوم ( شکل ۱۰ ب و شکل ۱۱ب) آستانه ای را نشان داد که با ناهمسانگردی متغیر است (از ۱۰- تا ۲۰ متر). بنابراین اندازه ۲۰ متر انتخاب شد، که اجازه می دهد ارزش آستانه به طور مستقل از جهت به دست آید و همچنین اجازه می دهد تعداد بیشتری از درختان نمونه برداری شود.
۴٫۴٫ بهینه سازی منطقه نمونه برداری
روابط آلومتریک بین ارتفاع درخت و متغیرهای ساختاری اصلی مورد استفاده برای توصیف یک جنگل رخ می دهد. آن روابط تجربی به تمام درختان غالب به عنوان یک کل اشاره دارد (در شکل ۱۲ گونه های a-c با رنگ های مختلف نشان داده شده اند). منحنیهای درونیابی صدکهای ۵، ۵۰ و ۹۵ (به ترتیب خط آبی چیندار پایین، خط پیوسته سیاه و خط آبی چیندار بالایی) برای کمک به تفسیر نمودارهای پراکنده بیش از حد اعمال شدند. به گفته پوپسکو [ ۲۱ ]، منحنی های درونیابی روندی نمایی را نشان دادند.
هر چه H بالاتر باشد ، پراکندگی AGB ( H )، V ( H ) و G ( H ) گسترده تر است. در واقع، همانطور که گونه اصلی جمعیت ( Q. pubescens ) تا بلندترین ارتفاعات گسترش یافت، به وسیع ترین پراکندگی رسید.
زانوی نیمواریوگرام بر شبکهبندی منطقه به کرتهای مربعی به ضلع ۲۰ متر حکمفرما میشود. سپس کرت ها به طور تصادفی انتخاب شدند تا همبستگی بین ویژگی های ساختاری ( AGB ، V و G ) و ارتفاع درخت ( H و H CHM ) برای تعداد کرت های داده شده بررسی شود.
انتخاب کل قطعه (۳۶ قطعه، منطقه نمونه برداری S = ۱۰۰) با نمونه برداری از کل جمعیت درختان مطابقت داشت. مقادیر متناظر AGB ( شکل ۱۳ a-c)، V (پانلهای d، e، f)، و G (پانلهای g، h، i) برای S = ۱۰۰ بهعنوان مقادیر مرجع جمعیت در نظر گرفته شدند، بنابراین مطابق با خطای نسبی ظاهری صفر ( ρ AGB ، ρ V ، ρ G ).
با کاهش تدریجی حجم نمونه (۳۰، ۲۴، ۱۸، ۱۲، ۶، از ۳۶ قطعه) سطوح به تدریج کوچکتر را مشخص کردیم. لازم به ذکر است که وجود کرت های مرزی حاکی از آن است که سطوح کرت ها می تواند متفاوت باشد. با کاهش سطح نمونه، خطاهای نسبی مطلق (| ρ AGB |، | ρ V |، | ρ G | به ترتیب در شکل ۱۰ پانل های بالایی، میانی و پایینی) افزایش یافت.
با توجه به پراکندگی ویژگیهای ساختاری، تصمیم گرفته شد از سه رابطه آلومتریک برای تعیین کمیت خطاهای نسبی در تعیین ویژگیهای ساختاری برای نرخهای مختلف نمونهبرداری استفاده شود. توزیع فضایی AGB ، و همچنین تنوع بالا و پایین AGB L و AGB U ، از میانگین مقدار H CHM تعداد معینی از نمودارهای انتخاب شده و به طور مشابه برای سایر ویژگی های ساختاری V و G محاسبه شد.
منحنیهای درونیابی میانگین و صدک ۹۹ (به ترتیب منحنیهای آبی و سیاه چین) به شکل ۱۳ اضافه شدند تا تفسیر آن تسهیل شود. منحنیهای لگاریتمی به خوبی روند دادهها را توصیف میکنند (در شکل ۱۲ )، و میتوان از آنها برای تعیین کمیت اندازه ناحیه نمونهگیری با فرض مقدار قابل قبول حداکثر خطای نسبی مطلق استفاده کرد.
به عنوان مثال، با فرض مقدار قابل تحمل حداکثر خطای نسبی مطلق برابر با ۲۰٪ (خط افقی آبی ثابت) در تخمین ویژگی ساختاری، نمونه برداری از موارد زیر کافی بود:
- –
-
یک سطح جنگل بین ۵۱٪ (بر اساس AGB L ، پانل c منحنی سیاه) و ۵۶٪ (بر اساس AGB U ، منحنی سیاه پانل b)، که مربوط به میانگین خطای متغیر بین ۱۳٪ ( AGB L ، منحنی چین آبی) و ۱۲٪ ( AGB U ، منحنی خط چین آبی)؛
- –
-
یک سطح جنگل بین ۵۲٪ (بر اساس V L ، پانل f منحنی سیاه) و ۶۰٪ (بر اساس V U ، پانل e منحنی سیاه)، که مربوط به یک خطای متوسط بین ۱۲٪ ( V L ، منحنی نقطه چین آبی) و ۱۱٪ ( V U ، منحنی خط تیره آبی)؛
- –
-
یک سطح جنگل بین ۳۳٪ (بر اساس G L ، پانل i، منحنی سیاه) و ۴۶٪ (بر اساس GU ، پانل h منحنی سیاه)، مربوط به میانگین خطای ۱۲٪ (برای هر دو GL و GU ، منحنی های خط چین آبی).
مشخص شد که منطقه نمونهبرداری یک پارامتر طراحی نمونهبرداری بسیار مهم است، زیرا بر دقت برآورد ویژگیهای ساختاری توده جنگلی تأثیر میگذارد. در واقع، خطای نسبی به طور تصاعدی با افزایش منطقه نمونهبرداری کاهش یافت، مطابق با مطالعات قبلی که گزارش میدادند که دقت تخمینهای ویژگیهای ساختاری به طور قابلتوجهی از نظر ضریب تعیین، RMSE و سوگیری با افزایش شش برابری منطقه نمونهگیری بهبود یافته است [ ۳۸ ] ] یا تکرار شدند [ ۴۱ ]. برخی از نویسندگان حداقل منطقه نمونه برداری (۵۰۰ متر مربع ) را برای ارائه برآوردهای دقیق پیشنهاد کردند [ ۱۶ ، ۳۹ ]. چندین نویسنده [ ۱۶ , ۳۸ ,۳۹ ، ۴۱ ] به این نتیجه رسیدند که نمونه برداری از مناطق بزرگتر دقت برآوردها را به طور قابل توجهی افزایش نمی دهد، اگرچه هزینه کار میدانی را افزایش می دهد. در این نسخه خطی، ما مقدار منطقه نمونهگیری را پیشنهاد نمیکنیم. در عوض، ما یک روش برای تعیین حداقل مساحت نمونهبرداری پیشنهاد میکنیم تا برخی ویژگیهای ساختاری جنگل را با دقت قابل قبولی بر اساس قدر مطلق حداکثر خطای نسبی تخمین بزنیم.
۵٫ نتیجه گیری ها
نسخه خطی روش جدیدی را برای به حداقل رساندن سطح نمونه برداری از یک جنگل قدیمی با توجه به مقدار قابل تحمل حداکثر خطای نسبی گزارش می کند. سپس آن ناحیه با یک مقدار مطلق خطای نسبی متوسط مشخص می شود. منطقه با سرشماری از درختان در کرت های تصادفی نمونه برداری می شود. اندازه کرت با تحلیل نیم متغیری ارتفاع درختان به دست می آید. با توجه به یک مولفه semivariogram که یک آستانه را نشان می دهد، طول (۲۰ متر در مطالعه حاضر) به عنوان حداقل بعد فرض می شود که تقریباً کل واریانس ویژگی های ساختاری جنگل را مشخص می کند.
یک اسکنر لیزری بر روی پهپاد اجازه میدهد تا برخی از ویژگیهای مهم ساختاری جنگل، از جمله زیست توده بالای زمین، حجم در حال رشد و مساحت پایه، تخمین زده شود. علاوه بر اسکن لیزری پهپاد، این روش از GNSS، بررسی شعاعی و اندازهگیریهای هیپسومتریک استفاده میکند.
از آنجایی که درختان بسیار بلند و نزدیک مانع از انتقال سیگنال GNSS میشوند، یک استراتژی برای تسهیل موقعیتیابی این بود که راهحل اولیه را با پردازش سیگنالهای ماهوارههای GLONASS (که دید آنها بالاترین بود) برطرف کنیم و سپس سیگنالهای GPS را برای بهبود موقعیتیابی اضافه کنیم. دقت ( PDOP <~10).
ارتفاع درختان غالب، هم غالب و میانی اندازه گیری شده در محل بسیار قوی بود ( r2 = ۰٫۹۸) با آنهایی که از طریق اسکن لیزری پهپاد برآورد شده بودند.
یافتههای ما نشان داد که با فرض حداکثر خطای نسبی مطلق در برآورد ویژگیهای ساختاری (۲۰٪ در این کار)، کافی است بخشی از توده جنگلی مورد بررسی را نمونهبرداری کنیم تا کل منطقه مورد مطالعه با میانگین خطای پایین مشخص شود (<< 13 درصد. به طور خاص، ما حداکثر مقادیر زیر را از سطوح نمونه برداری و میانگین خطاهای مطلق به دست آوردیم: سطح نمونه برداری ۵۰٪ با ۱۳٪ خطا برای تخمین زیست توده بالای زمین. ۶۰% با خطای ۱۲% برای حجم رو به رشد سهام؛ و ۴۶% با ۱۲% خطا برای ناحیه پایه.
برای مطالعات آینده، ما در حال بررسی روششناسی با محصولات LiDAR چند اکوی هوابرد هستیم که اخیراً توسط «وزارت محیطزیست و حفاظت از زمین و دریا» ایتالیا ( Ministrio dell’Ambiente e della Tutela del Territorio e del Mare ) بهعنوان بخشی از آن خریداری شده است. یک طرح سنجش از دور محیطی ( Piano Straordinario di Telerilevamento Ambientale ). در واقع، یک مدل زمین دیجیتال و یک مدل سطح دیجیتال (اولین و آخرین بازگشت) بنا به درخواست با وضوح فضایی ۲ متر در دسترس هستند.
در نهایت، اگرچه روش ما نشان داده شده است که توصیف ویژگیهای ساختاری جنگل را ساده میکند، باید روی دیگر تودههای جنگلی با پیچیدگی توپوگرافی و ساختاری مختلف آزمایش شود.
پیوست اول
| مخفف و نماد | معنی | واحد |
| ALS | اسکن لیزری هوابرد | |
| CHM | مدل ارتفاع سایبان | |
| CODE DIFF | دیفرانسیل مبتنی بر کد | |
| CORS | ایستگاه های مرجع به طور مداوم کار می کنند | |
| EPN | شبکه دائمی EUREF | |
| EUREF | کمیسیون فرعی چارچوب مرجع برای اروپا | |
| LiDAR | تشخیص نور و محدوده | |
| IGMI | Istituto Geografico Militare Italiano | |
| IR | مادون قرمز | |
| INS | سیستم ناوبری اینرسی | |
| IUSS | اتحادیه بین المللی علوم خاک | |
| گلوناس | سیستم ماهوارهای ناوبری جهانی (به روسی: Global’naja Navigacionnaja Sputnikovaja Sistema) | |
| جی پی اس | سیستم موقعیت یاب جهانی | |
| GPS+ | موقعیت یابی GPS + GLONASS | |
| GNSS | سیستم جهانی ناوبری ماهواره ای | |
| NRLMSISE | آزمایشگاه تحقیقاتی نیروی دریایی ایالات متحده طیف سنج جرمی-رادار پراکندگی نامنسجم | |
| MEMS | سیستم های میکرو الکترومکانیکی | |
| رنگ پریده | ایستگاه دائمی CORS در پالرمو | |
| PRIZ | ایستگاه دائمی CORS در Prizzi | |
| پهپاد | وسیلهی نقلیهی هوایی بدون سرنشین | |
| پهپاد | اسکن لیزری با پهپاد | |
| UNIPA | دانشگاه پالرمو | |
| V1 و V2 | نشانه های مرجع GNSS | |
| V3 | کل موقعیت یابی ایستگاه | |
| RGB-D | قرمز سبز آبی-عمق | |
| RINEX | صرافی مستقل گیرنده | |
| RTK | زمان واقعی سینماتیک | |
| SAC | مناطق ویژه حفاظتی | |
| SLAM | محلی سازی و نقشه برداری همزمان | |
| AGB | زیست توده روی زمین | Mg |
| DBH | قطر در ارتفاع سینه | (متر) |
| DSM | مدل سطح دیجیتال | (متر قبل) |
| DTM | مدل زمین دیجیتال | (متر قبل) |
| اچ | ارتفاع درخت در محل اندازه گیری شد | (متر) |
| HCHM | ارتفاع درخت از CHM | (متر) |
| جی | ناحیه پایه | ( متر ۲ ) |
| PDOP | موقعیت DOP | (-) |
| RMSE | ریشه میانگین مربعات خطا | (به عنوان متغیر ورودی) |
| اس | منطقه نمونه برداری | ( متر ۲ ) |
| SNR | نسبت سیگنال به نویز | (-) |
| UTC | زمان جهانی هماهنگ شده است | (hh:mm:ss) |
| V | افزایش حجم سهام | ( متر ۳ ) |
| γ/ ۲ | نیمه واریانس | (مربع واحدهای ورودی) |
| ρ AGB | خطای نسبی AGB | (-) |
| ρ G | خطای نسبی G | (-) |
| ρ V | خطای نسبی V | (-) |
منابع
- لیو، سی جی; برانتیگان، آر. استفاده از GPS دیفرانسیل برای بررسیهای تراورس جنگل. می توان. جی. برای. Res. ۱۹۹۵ ، ۲۵ ، ۱۷۹۵-۱۸۰۵٫ [ Google Scholar ] [ CrossRef ]
- صوفیه، اس. Sferlazza، S. ماریوتینی، آ. نیکولینی، ام. کوپی، تی. میوزو، ام. لامانتیا، تی. Maetzke, F. مطالعه موردی کاربرد اسکن لیزری سیار دستی در برنامه ریزی یک جنگل ایتالیایی (Alpe Di Catenaia، توسکانی). بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی ۲۰۲۱ ، XLIII-B2-2021 ، ۷۶۳-۷۷۰٫ [ Google Scholar ] [ CrossRef ]
- کراوز، اس. سندرز، TGM؛ Mund, J.-P.; اندازهگیری ارتفاع درخت فتوگرامتری مبتنی بر پهپاد Greve، K. برای پایش شدید جنگل. Remote Sens. ۲۰۱۹ , ۱۱ , ۷۵۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Lechner, AM; فودی، جنرال موتورز; Boyd، کاربردهای DS در سنجش از دور برای مدیریت و اکولوژی جنگل. One Earth ۲۰۲۰ , ۲ , ۴۰۵–۴۱۲٫ [ Google Scholar ] [ CrossRef ]
- Sferlazza، S. مالتیز، آ. سیرائولو، جی. داردانلی، جی. Maetzke، FG; La Mela Veca، DS Forest Accessibility، Madonie Mountains (شمال سیسیل، ایتالیا): پیاده سازی سیستم پشتیبانی تصمیم گیری GIS. J. Maps ۲۰۲۱ , ۱۷ , ۴۷۶–۴۸۵٫ [ Google Scholar ] [ CrossRef ]
- والاس، ال. ماسک، آر. Lucieer, A. ارزیابی تکرارپذیری معیارهای موجودی خودکار جنگل که از دادههای اسکن لیزری ناشی از پهپاد به دست آمده است. IEEE Trans. Geosci. Remote Sens. ۲۰۱۴ , ۵۲ , ۷۱۶۰–۷۱۶۹٫ [ Google Scholar ] [ CrossRef ]
- گاتزیولیس، دی. فرید، جی اس. مونلئون، در مقابل چالشهای برآورد ارتفاع درخت از طریق LiDAR در جنگلهای تاجپوش بسته: تمثیلی از اورگان غربی. برای. علمی ۲۰۱۰ ، ۵۶ ، ۱۳۹-۱۵۵٫ [ Google Scholar ]
- میلکارک، ام. Stereńczak، K. خسروی پور، ع. آزمایش و ارزیابی روشهای تولید مدل ارتفاع تاج پوششی مشتق از LiDAR برای تخمین ارتفاع درخت. بین المللی J. Appl. زمین Obs. Geoinf. ۲۰۱۸ ، ۷۱ ، ۱۳۲-۱۴۳٫ [ Google Scholar ] [ CrossRef ]
- پوپسکو، SC; Wynne، RH; نلسون، RF برآورد ارتفاعات درخت در سطح قطعه با Lidar: فیلتر محلی با اندازه پنجره متغیر بر اساس ارتفاع تاج. محاسبه کنید. الکترون. کشاورزی ۲۰۰۲ ، ۳۷ ، ۷۱-۹۵٫ [ Google Scholar ] [ CrossRef ]
- وانگ، ی. لهتوماکی، ام. لیانگ، ایکس. پیورالا، جی. کوکو، ا. جااکولا، ا. لیو، جی. فنگ، ز. چن، آر. Hyyppä، J. ارتفاع درخت اندازهگیری شده در میدان به همان اندازه قابل اعتماد است که تصور میشود—مطالعه مقایسهای تخمینهای ارتفاع درخت از اندازهگیری میدانی، اسکن لیزری هوابرد و اسکن لیزری زمینی در یک جنگل شمالی. ISPRS J. Photogramm. Remote Sens. ۲۰۱۹ ، ۱۴۷ ، ۱۳۲-۱۴۵٫ [ Google Scholar ] [ CrossRef ]
- پوپسکو، SC; Wynne، RH; نلسون، RF اندازه گیری قطر تاج درخت فردی با لیدار و ارزیابی تأثیر آن بر تخمین حجم جنگل و زیست توده. می توان. J. Remote Sens. ۲۰۰۳ ، ۲۹ ، ۵۶۴-۵۷۷٫ [ Google Scholar ] [ CrossRef ]
- Coops، NC; هیلکر، تی. Wulder، MA; سنت اونگه، بی. نیونهام، جی. سیگینز، آ. Trofymow، JA برآورد ساختار تاج پوشش جنگل داگلاس-فرست از LiDAR گسسته بازگشت. درختان-سازه. کارکرد. ۲۰۰۷ ، ۲۱ ، ۲۹۵-۳۱۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رابرتز، اس. دین، تی جی; ایوانز، دی ال. مک کومبز، جی. هرینگتون، آر ال. Glass, PA تخمین سطح برگ درختان در مزارع کاج لوبلی با استفاده از اندازهگیریهای اندازهگیری ارتفاع و ابعاد تاج از LiDAR. برای. Ecol. مدیریت ۲۰۰۹ ، ۲۱۳ ، ۵۴-۷۰٫ [ Google Scholar ] [ CrossRef ]
- گارسیا-سیماراس، آ. Manzanera، JA; Valbuena، R. تجزیه و تحلیل تغییرات نوع سوخت گیاهی مدیترانه با استفاده از Lidar چند زمانی. Forests ۲۰۲۱ , ۱۲ , ۳۳۵٫ [ Google Scholar ] [ CrossRef ]
- سولانو، اف. پراتیکو، اس. پیووسان، جی. Modica، G. شکاف های سایبان مشتق شده از وسیله نقلیه هوایی بدون سرنشین (UAV) در جنگل راش قدیمی کوه پولینلو (ایتالیا): نتایج اولیه. در علوم محاسباتی و کاربردهای آن – ICCSA 2021 ؛ Gervasi, O., Murgante, B., Misra, S., Garau, C., Blečić, I., Taniar, D., Apduhan, BO, Rocha, AMAC, Tarantino, E., Torre, CM, Eds. یادداشت های سخنرانی در علوم کامپیوتر; انتشارات بین المللی Springer: چم، سوئیس، ۲۰۲۱; جلد ۱۲۹۵۵، ص ۱۲۶–۱۳۸٫ شابک ۹۷۸-۳-۰۳۰-۸۷۰۰۶-۵٫ [ Google Scholar ]
- اندرسون، آر اس؛ Bolstad، PV تخمین بیوماس بالای زمین و میانگین افزایش سالانه زیست توده چوب با هوابرد Leaf-on و Leaf-off Lidar در انواع جنگلی دریاچه های بزرگ. شمال. J. Appl. برای. ۲۰۱۳ ، ۳۰ ، ۱۶-۲۲٫ [ Google Scholar ] [ CrossRef ]
- بوتالیکو، اف. چیریچی، جی. جیانینی، آر. مله، اس. مورا، م. پوکسدو، ام. McRoberts، RE; والبوئنا، آر. Travaglini، D. مدل سازی ساختار جنگل مدیترانه با استفاده از داده های اسکن لیزری هوابرد. بین المللی J. Appl. زمین Obs. Geoinf. ۲۰۱۷ ، ۵۷ ، ۱۴۵-۱۵۳٫ [ Google Scholar ] [ CrossRef ]
- چیریچی، جی. McRoberts، RE; فتورینی، ال. مورا، م. مارکتی، ام. مقایسه معیارهای مبتنی بر مدل بر اساس اکو و ارتفاع تاج برای افزایش تخمین زیست توده جنگلی در سطح زمین در یک چارچوب به کمک مدل. سنسور از راه دور محیط. ۲۰۱۶ ، ۱۷۴ ، ۱-۹٫ [ Google Scholar ] [ CrossRef ]
- کرونا، پی. کارتیزانو، آر. سالواتی، ر. چیریچی، جی. فلوریس، ا. دی مارتینو، پی. مارکتی، ام. اسکرینزی، جی. کلمنتل، اف. تراواگلینی، دی. و همکاران اسکن لیزری هوابرد برای پشتیبانی از مدیریت منابع جنگلی در محیط های آلپ، معتدل و مدیترانه ای در ایتالیا. یورو J. Remote Sens. ۲۰۱۲ ، ۴۵ ، ۲۷-۳۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Næsset، E. پیش بینی ویژگی های توده جنگلی با لیزر اسکن هوابرد با استفاده از یک روش عملی دو مرحله ای و داده های میدانی. سنسور از راه دور محیط. ۲۰۰۲ ، ۸۰ ، ۸۸-۹۹٫ [ Google Scholar ] [ CrossRef ]
- Popescu، SC برآورد زیست توده درختان کاج با استفاده از هوابرد Lidar. Biomass Bioenergy ۲۰۰۷ ، ۳۱ ، ۶۴۶-۶۵۵٫ [ Google Scholar ] [ CrossRef ]
- رویز، لس آنجلس؛ هرموسیلا، تی. مائورو، اف. گودینو، M. تجزیه و تحلیل تاثیر اندازه قطعه و تراکم LiDAR بر برآورد ویژگی ساختار جنگل. جنگلها ۲۰۱۴ ، ۵ ، ۹۳۶-۹۵۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هولمگرن، جی. نیلسون، ام. اولسون، اچ. برآورد ارتفاع درخت و حجم ساقه در کرت ها با استفاده از اسکن لیزری هوابرد. برای. علمی ۲۰۰۳ ، ۴۹ ، ۴۱۹-۴۲۸٫ [ Google Scholar ] [ CrossRef ]
- McRoberts، RE; Tomppo، EO; Næsset، E. پیشرفت ها و مسائل نوظهور در فهرست جنگل های ملی. Scand. جی. برای. Res. ۲۰۱۰ ، ۲۵ ، ۳۶۸-۳۸۱٫ [ Google Scholar ] [ CrossRef ]
- Hyyppä، J.; یو، ایکس. Hyyppä، H.; واستارانتا، م. هولوپاینن، م. کوکو، ا. کارتینن، اچ. جااکولا، ا. واجا، م. کوسکینن، جی. و همکاران پیشرفت در فهرست موجودی جنگل با استفاده از اسکن لیزری هوابرد. Remote Sens. ۲۰۱۲ ، ۴ ، ۱۱۹۰-۱۲۰۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کاربردهای جنگلداری اسکن لیزری هوابرد: مفاهیم و مطالعات موردی . مالتامو، ام. ناست، ای. Vauhkonen, J. (Eds.) Managing Forest Ecosystems; Springer: Dordrecht، هلند، ۲۰۱۴; جلد ۲۷ شابک ۹۷۸-۹۴-۰۱۷-۸۶۶۲-۱٫ [ Google Scholar ]
- لطیفی، ح. Fassnacht، FE; مولر، جی. ثرانی، ع. دچ، اس. فهرستهای هیوریچ، ام. جنگل توسط دادههای LiDAR: مقایسه روشهای تقسیمبندی تک درخت و روشهای مبتنی بر متریک برای موجودیهای یک جنگل معتدل ناهمگن. بین المللی J. Appl. زمین Obs. Geoinf. ۲۰۱۵ ، ۴۲ ، ۱۶۲-۱۷۴٫ [ Google Scholar ] [ CrossRef ]
- سفید، JC; Coops، NC; Wulder، MA; واستارانتا، م. هیلکر، تی. Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventory: A Review. می توان. J. Remote Sens. ۲۰۱۶ ، ۴۲ ، ۶۱۹-۶۴۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- معنی، JE; Acker، SA; فیت، بی جی؛ رنسلو، ام. امرسون، ال. هندریکس، سیجی در حال پیشبینی ویژگیهای پایه جنگلی با اسکن هوابرد Lidar. فتوگرام مهندس Remote Sens. ۲۰۰۰ , ۶۶ , ۱۳۶۷-۱۳۷۱٫ [ Google Scholar ]
- سیدل، ر. جاسوسان، TA; رامر، دبلیو. فولاد، EA; Pabst، RJ; اولسن، ک. محرکهای چند مقیاسی تنوع فضایی در تراکم کربن جنگلهای قدیمی که با لیدار و یک مدل منظره مبتنی بر فردی جدا شدهاند. اکوسیستم ها ۲۰۱۲ ، ۱۵ ، ۱۳۲۱-۱۳۳۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Sverdrup-Thygeson، A.; Ørka، HO; گوباکن، تی. Næsset، E. آیا اسکن لیزری هوابرد در نقشه برداری و نظارت بر جنگل های طبیعی کمک می کند؟ برای. Ecol. مدیریت ۲۰۱۶ ، ۳۶۹ ، ۱۱۶-۱۲۵٫ [ Google Scholar ] [ CrossRef ]
- سفید، JC; تومپالسکی، پ. Coops، NC; Wulder، MA مقایسه اسکن لیزری هوابرد و تصاویر استریو دیجیتال برای مشخص کردن شکاف های تاج پوشش جنگل در جنگل های بارانی معتدل ساحلی. سنسور از راه دور محیط. ۲۰۱۸ ، ۲۰۸ ، ۱-۱۴٫ [ Google Scholar ] [ CrossRef ]
- باهوس، ج. پوتمن، ک. مسیه، سی. جنگلکاری برای صفات قدیمی. برای. Ecol. مدیریت ۲۰۰۹ ، ۲۵۸ ، ۵۲۵-۵۳۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بوراسکانو، اس. کیتون، WS; ساباتینی، اف.ام. Blasi، C. اشتراک و تنوع در ویژگی های ساختاری جنگل های قدیمی معتدل مرطوب: یک بررسی جهانی. برای. Ecol. مدیریت ۲۰۱۳ ، ۲۹۱ ، ۴۵۸-۴۷۹٫ [ Google Scholar ] [ CrossRef ]
- Lindenmayer، DB; فرانکلین، JF حفاظت از تنوع زیستی جنگل: یک رویکرد جامع چند مقیاسی . مطبوعات جزیره: واشنگتن، دی سی، ایالات متحده آمریکا، ۲۰۰۲; شابک ۹۷۸-۱-۵۵۹۶۳-۹۳۵-۴٫ [ Google Scholar ]
- شورهوا، ای. Kneishaw، D. کولوواینن، تی. Gauthier، S. تغییرپذیری و پویایی جنگلهای قدیمی در منطقه محیطی: پیامدهایی برای حفاظت، بازسازی و مدیریت. سیلوا فن ۲۰۱۱ ، ۴۵ ، ۷۸۵-۸۰۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جیانگ، ی. کیم، جی بی؛ Trugman، AT; کیم، ی. با این حال، CJ محدودیتهای فیزیولوژیکی درخت را با پیشبینی جریانات کربن و آب در جنگلهای مخروطی قدیمی مرتبط میکند. Ecosphere ۲۰۱۹ ، ۱۰ ، e02692:20. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مک گاروی، جی سی; تامپسون، جی آر. اپستاین، HE; ذخیرهسازی کربن شوگارت، اچاچ، جونیور در جنگلهای قدیمی اقیانوس اطلس: به سوی درک بهتر سینک کربن جنگلهای شرقی. اکولوژی ۲۰۱۵ ، ۹۶ ، ۳۱۱-۳۱۷٫ [ Google Scholar ] [ CrossRef ]
- کرونا، پی. بلاسی، سی. چیریچی، جی. Facioni، L. فتورینی، ال. فراری، ب. پایش و ارزیابی تودههای جنگلی قدیمی با نمونهبرداری قطعه. گیاه. Biosyst. ۲۰۱۰ ، ۱۴۴ ، ۱۷۱-۱۷۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- موتا، آر. گاربارینو، م. برتی، آر. بیلانوویچ، آی. بورگوگنو موندینو، ای. چوروویچ، م. کرن، اس. ملونی، اف. Nosenzo، A. ساختار، دینامیک فضایی-زمانی و رژیم آشفتگی جنگل های قدیمی راش-نقره-نروژ صنوبر نروژ Biogradska Gora (مونته نگرو). گیاه. Biosyst.-An. بین المللی جی. معامله. همه Asp. گیاه. Biol. ۲۰۱۵ ، ۱۴۹ ، ۹۶۶-۹۷۵٫ [ Google Scholar ] [ CrossRef ]
- Paillet، Y.; پرنو، سی. بولانجر، وی. دیبایو، ن. فوهر، م. گیلگ، او. گوسلین، اف. کمی سازی بازیابی ویژگی های قدیمی رشد در ذخایر جنگلی: اولین مرجع برای فرانسه. برای. Ecol. مدیریت ۲۰۱۵ ، ۳۴۶ ، ۵۱-۶۴٫ [ Google Scholar ] [ CrossRef ]
- بارابسی، ال. فاتورینی، L. استفاده از نمونه برداری از طرح تکراری، خطی و نقطه ای برای تخمین فراوانی گونه ها و تنوع اکولوژیکی. محیط زیست Ecol. آمار ۱۹۹۸ ، ۵ ، ۳۵۳-۳۷۰٫ [ Google Scholar ] [ CrossRef ]
- الساندرینی، آ. بیوندی، اف. دی فیلیپو، آ. زیاکو، ای. Piovesan، G. توزیع اندازه درخت در مقیاس های فضایی فزاینده به منحنی سیگموئید چرخشی در دو توده راش قدیمی در آپنین ایتالیا همگرا می شود. برای. Ecol. مدیریت ۲۰۱۱ ، ۲۶۲ ، ۱۹۵۰-۱۹۶۲٫ [ Google Scholar ] [ CrossRef ]
- فریزر، GW; مگنوسن، اس. Wulder، MA; Niemann, KO تأثیر اندازه قطعه نمونه و خطای ثبت مشترک بر دقت و عدم قطعیت برآوردهای مشتق شده از LiDAR از زیست توده جنگلی را شبیه سازی کرد. سنسور از راه دور محیط. ۲۰۱۱ ، ۱۱۵ ، ۶۳۶-۶۴۹٫ [ Google Scholar ] [ CrossRef ]
- لومباردی، اف. مارکتی، ام. کرونا، پی. مرلینی، پی. چیریچی، جی. توگنتی، آر. بوراسکانو، اس. علیورنینی، ا. Puletti، N. کمی سازی اثر اندازه قطعه نمونه بر تخمین شاخص های ساختاری در توده های جنگلی قدیمی. برای. Ecol. مدیریت ۲۰۱۵ ، ۳۴۶ ، ۸۹-۹۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- McRoberts، RE; زمستان، اس. چیریچی، جی. LaPoint، E. ارزیابی طبیعی بودن جنگل. برای. علمی ۲۰۱۲ ، ۵۸ ، ۲۹۴-۳۰۹٫ [ Google Scholar ] [ CrossRef ]
- گوباکن، تی. Næsset، E. ارزیابی اثرات خطاهای موقعیتیابی و اندازه طرح نمونه بر ویژگیهای پایه بیوفیزیکی مشتق شده از دادههای اسکنر لیزری هوابرد. می توان. جی. برای. Res. ۲۰۰۹ ، ۳۹ ، ۱۰۳۶-۱۰۵۲٫ [ Google Scholar ] [ CrossRef ]
- ژائو، ک. پوپسکو، اس. نلسون، آر. لیدار سنجش از دور زیست توده جنگلی: رویکرد تخمینی غیرمتغیر مقیاس با استفاده از لیزرهای هوابرد. سنسور از راه دور محیط. ۲۰۰۹ ، ۱۱۳ ، ۱۸۲-۱۹۶٫ [ Google Scholar ] [ CrossRef ]
- کالامینی، جی. مالتونی، ا. تراواگلینی، دی. آیوینو، اف. نیکولاسی، آ. منگوزاتو، جی. کرونا، پی. فراری، بی. سانتو، دی. چیریچی، جی. و همکاران Caratteri Strutturali Di Potenziali Foreste Vetuste Appenniniche: Risultati Preliminari. L’Italia برای. ای مونت. ۲۰۱۱ ، ۶۶ ، ۳۶۵-۳۸۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- موتا، آر. گاربارینو، م. برتی، آر. ملونی، اف. نوسنزو، ا. Vacchiano، G. توسعه ویژگی های پیری در جنگل های ناهموار آلپ ایتالیایی. یورو جی. برای. Res. ۲۰۱۵ ، ۱۳۴ ، ۱۹-۳۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Nagel، TA; Svoboda، M. شکاف رژیم اختلال در جنگل قدیمی فاگوس-آبیس در کوه های دیناریک، بوسنی و هرزگوین. می توان. جی. برای. Res. ۲۰۰۸ ، ۳۸ ، ۲۷۲۸-۲۷۳۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بادالامنتی، ای. لامانتیا، تی. لامانتیا، جی. کایرون، ا. La Mela Veca، DS زیست توده زنده و مرده روی زمین در جنگل های مدیترانه: شواهدی از صفات رشد قدیمی در وحشی Quercus Pubescens. sl استند. Forests ۲۰۱۷ , ۸ , ۱۸۷٫ [ Google Scholar ] [ CrossRef ][ Green Version ]
- ریواس مارتینز، اس. پناس، ا. Díaz, T. نقشه جغرافیایی زیستی اروپا ; خدمات کارتوگرافی: Léon، اسپانیا، ۲۰۰۴٫ [ Google Scholar ]
- سازمان غذا و کشاورزی پایگاه مرجع جهانی منابع خاک ۲۰۱۴: سیستم بین المللی طبقه بندی خاک برای نامگذاری خاک ها و ایجاد افسانه برای نقشه های خاک . فائو: رم، ایتالیا، ۲۰۱۴; شابک ۹۷۸-۹۲-۵-۱۰۸۳۶۹-۷٫
- کاتنبورن، تی. اسپرلیچ، م. باتاوا، ک. Koch, B. تشخیص خودکار تک درخت نخل در مزارع با استفاده از ابرهای نقطه فتوگرامتری مبتنی بر پهپاد. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۴ ، XL–۳ ، ۱۳۹–۱۴۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بالسی، م. اسپوزیتو، اس. فالاولیتا، پ. Nardinocchi، C. تشخیص تک درخت در دادههای LiDAR با چگالی بالا از نظرسنجی مبتنی بر پهپاد. یورو J. Remote Sens. ۲۰۱۸ ، ۵۱ ، ۶۷۹–۶۹۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آندریتسانوس، وی دی. عرباتزی، او. جیانیو، م. پاگونیس، وی. Tziavos، IN; Vergos، GS; Zacharis، E. مقایسه راه حل های مختلف پردازش GPS به سمت اعتبارسنجی کارآمد شبکه عمودی هلنی: پروژه ELEVATION. J. Surv. مهندس ۲۰۱۶ , ۱۴۲ , ۰۴۰۱۵۰۰۷:۱۳٫ [ Google Scholar ] [ CrossRef ]
- Mageed، KMA مقایسه بستههای نرمافزار تجاری GPS برای پردازش خطوط پایه استاتیک تا ۳۰ کیلومتر. ARPN J. Eng. Appl. علمی ۲۰۱۵ ، ۱۰ ، ۱۰۶۴۰-۱۰۶۵۰٫ [ Google Scholar ]
- داردانلی، جی. پالیاگا، اس. آلگرا، ام. کارلا، ام. Giammarresi، V. کاربردهای ژئوماتیک پارک توربان در پالرمو. Geogr. فنی ۲۰۱۵ ، ۱۰ ، ۲۸-۴۳٫ [ Google Scholar ]
- Goad، CC یک مدل اصلاح شده انکسار تروپوسفری هاپفیلد. مقاله ارائه شده در نشست سالانه پاییز اتحادیه ژئوفیزیک آمریکا، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، ۱۲ تا ۱۷ دسامبر ۱۹۷۴٫ [ Google Scholar ]
- Hopfield، HS Two-Quartic Tropospheric Refraactivity Profile برای تصحیح داده های ماهواره ای. جی. ژئوفیس. Res. ۱۹۶۹ ، ۷۴ ، ۴۴۸۷-۴۴۹۹٫ [ Google Scholar ] [ CrossRef ]
- نیل، توابع نقشه برداری جهانی AE برای تاخیر اتمسفر در طول موج های رادیویی. جی. ژئوفیس. Res. B زمین جامد ۱۹۹۶ ، ۱۰۱ ، ۳۲۲۷-۳۲۴۶٫ [ Google Scholar ] [ CrossRef ]
- کولسون، دی.م. راث، KC Gemini North r’ Band تصویربرداری از لیزر Keck II. در Proceedings of the SPIE Proceedings; Ellerbroek, BL, Hart, M., Hubin, N., Wizinowich, PL, Eds. انجمن بین المللی اپتیک و فوتونیک: سن دیگو، کالیفرنیا، ایالات متحده آمریکا، ۲۰۱۰; جلد ۷۷۳۶، ص. ۹٫ [ Google Scholar ]
- Trimble GNSS Planning. در دسترس آنلاین: https://www.gnssplanning.com/#/settings (در ۲۱ فوریه ۲۰۲۲ قابل دسترسی است).
- Sferlazza، S. مائتزکه، اف. آیوینو، ام. بایامونته، جی. پالمری، وی. La Mela Veca، DS اثرات مدیریت جنگل سنتی بر ذخیره کربن در یک درخت بلوط مدیترانه ای ( Quercus Ilex L.). ایفورست-بیوژئوسی. برای. ۲۰۱۸ ، ۱۱ ، ۳۴۴-۳۵۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وارد، جی. آناگنوستاکیس، اس. Ferrandino, F. Stand Dynamics in Connecticut Hardwood Forests: The Old Series Plots (1927-1997) ; ایستگاه آزمایشی کشاورزی کانکتیکات: نیوهیون، سیتی، ایالات متحده آمریکا، ۱۹۹۹٫ [ Google Scholar ]
- تاباچی، جی. دی کازمو، ال. Gasparini، P. معادلات پیشبینی حجم درخت و فیتوماس برای گونههای جنگلی در ایتالیا. یورو J. Forest Res. ۲۰۱۱ ، ۱۳۰ ، ۹۱۱-۹۳۴٫ [ Google Scholar ] [ CrossRef ]
- مایر، تی. بین، جی. فرگوسن، سی. Naismith, J. اثر سایبان های پهن برگ بر اندازه گیری های افقی GPS/GLONASS با درجه نظرسنجی . مقالات گروه منابع طبیعی و محیط زیست؛ UCONN: استورز، CT، ایالات متحده آمریکا، ۲۰۰۲٫ [ Google Scholar ]
- Lachapelle، G. مسیریابی عابر پیاده با گیرنده های GPS و MEMS با حساسیت بالا. پارس محاسبات همه جا حاضر. ۲۰۰۷ ، ۱۱ ، ۴۸۱-۴۸۸٫ [ Google Scholar ] [ CrossRef ]
- فوزی، م.ف. ادریس، NH; یحیی، م.ح. دین، AHM; ادریس، NH; لاو، AMS؛ دقت موقعیتیابی درختان جنگلهای گرمسیری Ishak، MHL: مقایسه دستگاههای ارزانقیمت مجهز به GNSS. بین المللی J. Geoinform. ۲۰۱۶ ، ۱۲ ، ۵۹-۶۶٫ [ Google Scholar ]
- توماشتیک، جی. وارگا، ام. کاربرد عملی پردازش اندازهگیریهای GNSS خام استاتیک، مشاهده کوتاه مدت که توسط یک تلفن هوشمند در زیر پوشش گیاهی درخت ارائه میشود. Measurement ۲۰۲۱ , ۱۷۸ , ۱۰۹۳۹۷٫ [ Google Scholar ] [ CrossRef ]
- فن، ی. فنگ، ز. مانان، ا. خان، TU; شن، سی. Saeed, S. تخمین موقعیت درخت، قطر در ارتفاع سینه، و ارتفاع درخت در زمان واقعی با استفاده از تلفن همراه با RGB-D SLAM. Remote Sens. ۲۰۱۸ ، ۱۰ ، ۱۸۴۵٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کارتینن، اچ. Hyyppä، J.; واستارانتا، م. کوکو، ا. جااکولا، ا. یو، ایکس. پیورالا، جی. لیانگ، ایکس. لیو، جی. وانگ، ی. و همکاران دقت موقعیتیابی سینماتیکی با استفاده از سیستمهای ناوبری ماهوارهای جهانی در زیر سایبانهای جنگلی. Forests ۲۰۱۵ ، ۶ ، ۳۲۱۸-۳۲۳۶٫ [ Google Scholar ] [ CrossRef ]
- ناست، ای. Gjevestad، JG عملکرد موقعیت یابی دقیق نقطه GPS در زیر سایبان های جنگل مخروطیان. Photogramm Eng Remote Sens. ۲۰۰۸ ، ۷۴ ، ۶۶۱-۶۶۸٫ [ Google Scholar ] [ CrossRef ]
- والبوئنا، آر. مائورو، اف. رودریگز-سولانو، آر. Manzanera، JA دقت و دقت گیرنده های GPS در زیر سایبان های جنگلی در یک محیط کوهستانی. طول. جی. آگریک. Res. ۲۰۱۰ ، ۸ ، ۱۰۴۷٫ [ Google Scholar ] [ CrossRef ]
- داردانلی، جی. لو بروتو، ام. Pipitone، C. شبکه GNSS CORS دانشگاه پالرمو: طراحی و اولین تحلیل داده ها. جئوگ. فنی ۲۰۲۰ ، ۱۵ ، ۴۳-۶۹٫ [ Google Scholar ] [ CrossRef ]
- کنیرس، آ. بلت، جی جی; بروینینکس، سی. کاپورالی، ع. د دانکر، اف. دروسکاک، بی. دورت، آ. فرانکه، پی. جورجیف، آی. بینگلی، آر. و همکاران ادغام منطقه ای راه حل های شبکه GNSS متراکم ملی بلند مدت. GPS Sout ۲۰۱۹ ، ۲۳ ، ۱۲۲٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- داردانلی، جی. مالتیز، آ. پیپیتون، سی. پیسیوتا، آ. Lo Brutto، M. Nrtk، Ppp یا Static، این سوال است. تست راه حل های مختلف موقعیت یابی برای نظرسنجی Gnss. Remote Sens. ۲۰۲۱ , ۱۳ , ۱۴۰۶٫ [ Google Scholar ] [ CrossRef ]
- میکولسکی، جی . حمل و نقل مدرن. تله ماتیک: یازدهمین کنفرانس بین المللی حمل و نقل. Systems Telematics، TST 2011، Katowice-Ustron، لهستان، ۱۹-۲۲ اکتبر ۲۰۱۱، مقالات منتخب . Springer Science & Business Media: برلین/هایدلبرگ، آلمان، ۲۰۱۱; شابک ۹۷۸-۳-۶۴۲-۲۴۶۵۹-۳٫ [ Google Scholar ]
- Kissam, P. Surveying for Civil. مهندسان ؛ McGraw-Hill: نیویورک، نیویورک، ایالات متحده آمریکا، ۱۹۸۱; شابک ۹۷۸-۰-۰۷-۰۳۴۸۸۲-۰٫ [ Google Scholar ]
- کراوس، ک. Pfeifer، N. تعیین مدل های زمین در مناطق جنگلی با داده های اسکنر لیزری هوابرد. ISPRS J. Photogramm. Remote Sens. ۱۹۹۸ , ۵۳ , ۱۹۳-۲۰۳٫ [ Google Scholar ] [ CrossRef ]
- بیوندی، اف. مایرز، دی. Avery، CC مدلسازی زمین آماری اندازه و افزایش ساقه در یک جنگل قدیمی. می توان. جی. برای. Res. ۱۹۹۴ ، ۲۴ ، ۱۳۵۴-۱۳۶۸٫ [ Google Scholar ] [ CrossRef ]
- کولوواینن، تی. پنتینن، ا. لینونن، ک. نایگرن، ام. فرصت های آماری برای مقایسه ناهمگونی ساختاری توده در جنگل های مدیریت شده و اولیه: نمونه ای از جنگل صنوبر شمالی در فنلاند جنوبی. سیلوا Fennica ۱۹۹۶ ، ۳۰ ، ۳۱۵-۳۲۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کولوواینن، تی. جاروینن، ای. هوکانن، تی جی؛ رووینن، اس. Heikkinen، K. ناهمگونی ساختاری و خودهمبستگی فضایی در جنگل طبیعی بالغ کاج سیلوستریس تحت سلطه. اکوگرافی ۱۹۹۸ ، ۲۱ ، ۱۵۹-۱۷۴٫ [ Google Scholar ] [ CrossRef ]
- رزاس، وی. زاس، ر. سولا، الف. ساختار فضایی توده های جنگلی خزان پذیر با تأثیر متضاد انسانی در شمال غربی اسپانیا. یورو J. Forest Res. ۲۰۰۹ ، ۱۲۸ ، ۲۷۳-۲۸۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Song, C. تخمین اندازه تاج درخت با اطلاعات فضایی تصاویر سنجش از دور نوری با وضوح بالا. بین المللی J. Remote Sens. ۲۰۰۷ , ۲۸ , ۳۳۰۵-۳۳۲۲٫ [ Google Scholar ] [ CrossRef ]
- Dardanelli، G. Valutazione dell’apporto della costellazione GLONASS nel posizionamento NRTK con ricevitori GNSS geodetici. GEOmedia ۲۰۱۱ ، ۱۵ ، ۴۰-۴۶٫ [ Google Scholar ]
- لو، ی.-اچ. هان، J.-Y. تجزیه و تحلیل دید ماهواره ای GNSS بر اساس اطلاعات فضایی سه بعدی در مناطق شهری. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی ۲۰۲۰ ، XLIII-B4-2020 ، ۱۲۳-۱۲۸٫ [ Google Scholar ] [ CrossRef ]
- Evans، JD Straightforward Statistics for the Behavioral Sciences . بروکس / میخانه کول. شرکت: Pacific Grove, CA, USA, 1996; شابک ۹۷۸-۰-۵۳۴-۲۳۱۰۰-۲٫ [ Google Scholar ]
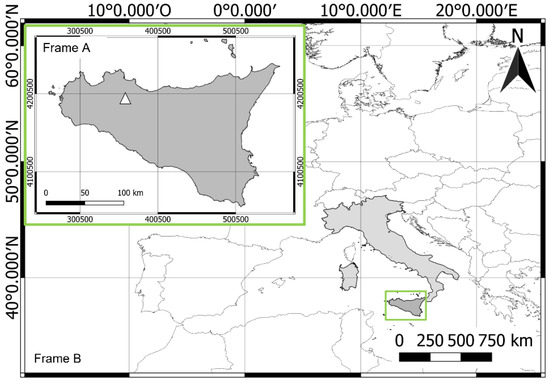
شکل ۱٫ موقعیت جنگل قدیمی (مثلث سفید) در منطقه حفاظت شده طبیعی منطقه “Bosco della Ficuzza, Rocca Busambra, Bosco del Cappelliere, Gorgo del Drago” در سیسیل (خاکستری تیره، قاب A، CRS پیش بینی شده ETRFN2008-RD) UTM zone 33N-EPSG: 6708). موقعیت سیسیل در قلمرو ایتالیا (خاکستری روشن، قاب B، ژئوسنتریک CRS RDN2008-EPSG: 6706).

شکل ۲٫ ساختار توده جنگلی کهنسال: ( الف ) درختان تکیه و خوابیده. ( ب ) درختان غالب و سرکوب شده و چوب خشک. ( ج ) شکاف سایبان.
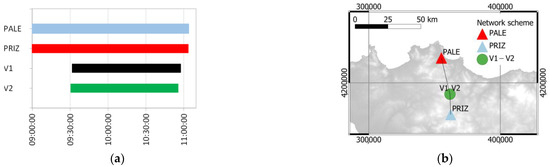
شکل ۳٫ برنامه ریزی اشغال زمانی ( a ) و طرح شبکه ( b )، EPSG: 6706.
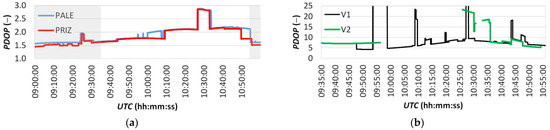
شکل ۴٫ سری زمان های PDOP : ( الف ) CORS PALE و PRIZ (به ترتیب خطوط آبی و قرمز). ( ب ) نشانه های مرجع V1 و V2 (به ترتیب خطوط سیاه و سبز). زمانهای غیر همپوشانی بین ایستگاههای دائمی و مکانهای دیدنی به رنگ خاکستری سایه میزنند.
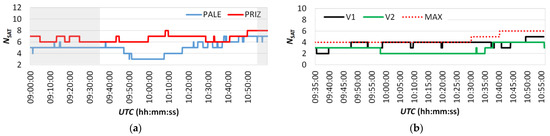
شکل ۵٫ تعداد ماهواره های GLONASS: ( الف ) CORS PALE و PRIZ (به ترتیب خطوط آبی و قرمز). ( ب ) V1 و V2 (به ترتیب خطوط سیاه و سبز). دورههای غیر همپوشانی بین ایستگاههای دائمی و مکانهای دیدنی به رنگ خاکستری سایه میزنند. حداکثر تعداد ماهواره برای موقعیت داده شده، دوره اندازه گیری، و برش ارتفاع (خط قرمز چین).
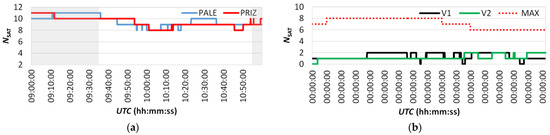
شکل ۶٫ تعداد ماهواره های GPS: ( الف ) CORS PALE و PRIZ (به ترتیب خطوط آبی و سبز). ( ب ) V1 و V2 (به ترتیب خطوط سیاه و سبز). دورههای غیر همپوشانی بین ایستگاههای دائمی و مکانهای دیدنی به رنگ خاکستری سایه میزنند. حداکثر تعداد ماهواره برای موقعیت داده شده، دوره اندازه گیری، و برش ارتفاع (خط قرمز چین).
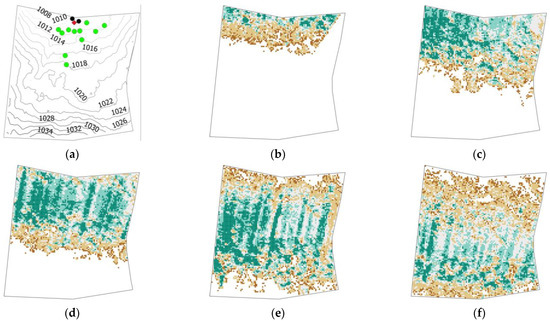
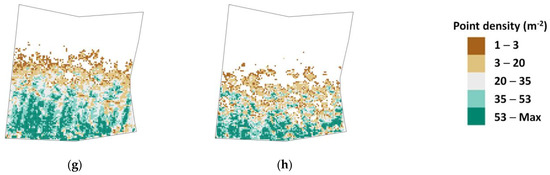
شکل ۷٫ بررسی های توپوگرافی و LAS: خطوط کانتور مشتق شده از DTM با نشانه های بررسی بیش از حد تحمیل شده (نقاط سیاه، پانل ( a )، موقعیت ایستگاه زمینی (نقطه قرمز)، درختان قرار گرفته (نقاط سبز)، تراکم نقطه خطوط اسکن LAS با تمام بازگشت ها در مقیاس رنگی رنگ زمینی نشان داده شده است .
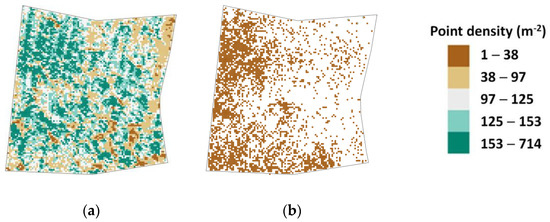
شکل ۸٫ بررسی های توپوگرافی و LAS: ( الف ) اولین تراکم بازگشت خطوط اسکن ادغام شده. ( ب ) سومین چگالی بازگشتی خطوط اسکن ادغام شده.
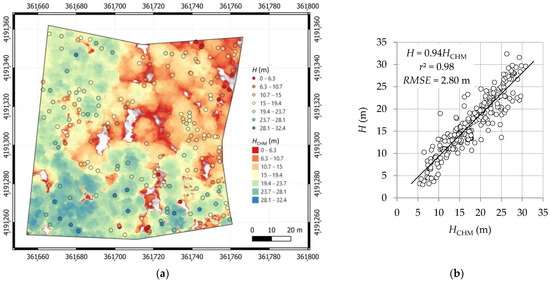
شکل ۹٫ ( الف ) نقشه رنگی درجه بندی شده CHM (گسسته سازی بازه مساوی) با ارتفاع بیش از حد درختان اندازه گیری شده در محل (فاصله برابر، مقیاس رنگی یکسان)، EPSG: 6706. ( ب ) نمودار پراکندگی بین H CHM و H (دایره های خالی) با آمار توصیفی (بهره، ضریب تعیین r2 و RMSE ) و خط روند خطی (به رنگ سیاه).
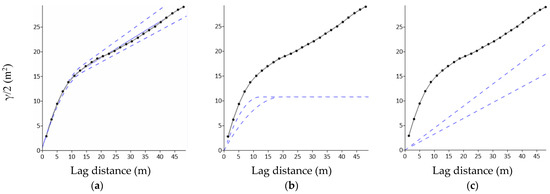
شکل ۱۰٫ نیمه متغیروگرام تجربی CHM (خط سیاه با نقاط)، با نزدیکترین نیمه متغیر نظری بیش از حد تحمیل شده (خط پیوسته آبی). محدوده تغییرپذیری نیم متغیره نظری (خطوط آبی چین): ( الف ) تمام اجزای نیمواریوگرام. ( ب ) مدل درجه دوم. ( ج ) مدل خطی.
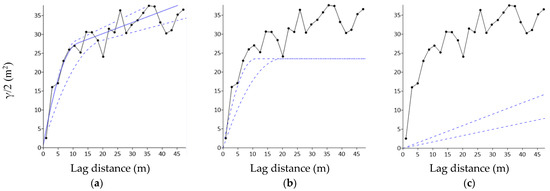
شکل ۱۱٫ نیمه متغیریگرام تجربی H (خط سیاه با نقاط)، با نزدیکترین نیمه متغیر نظری بیش از حد تحمیل شده (خط پیوسته آبی). محدوده تغییرپذیری نیم متغیره نظری (خطوط آبی چین): ( الف ) تمام اجزای نیمواریوگرام. ( ب ) مدل درجه دوم. ( ج ) مدل خطی.
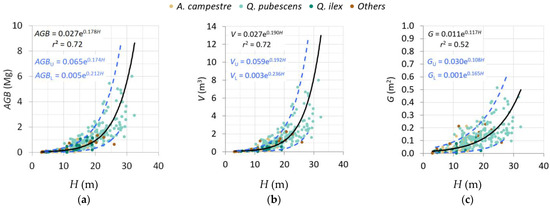
شکل ۱۲٫ روابط بین متغیرهای ساختاری جنگل در مقابل ارتفاع درختان درجا (غالب، هم غالب و میانی). نقاط سبز روشن به بلوط پرزدار، نقاط سبز تیره به بلوط هولم، نقطههای زرد به افرای مزرعه اشاره دارد، نقاط قهوهای شامل شاه بلوط شیرین و گونههای ثانویه است. خط روند نمایی (خط مشکی پیوسته) به همه گونه ها اشاره دارد، در حالی که خطوط نقطه چین پایین و بالا به ترتیب به منحنی های صدک ۵ و ۹۵ اشاره دارند. معادلات رگرسیون نیز گزارش شده است: AGB برای خط روند (مشکی)، و AGB L و AGB U به ترتیب برای صدک ۵ و ۹۵ (به رنگ آبی). متغیرهای ساختاری جنگل شامل ( الف ) AGB ، (ب ) V , و ( ج ) G .
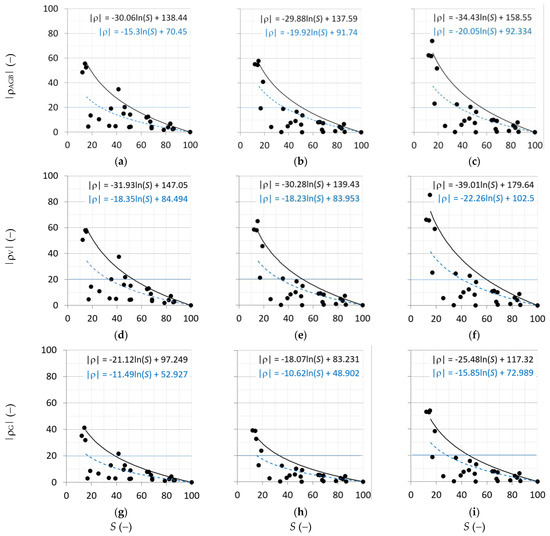
شکل ۱۳٫ مقدار مطلق خطای نسبی، |ρ|، ویژگی ساختاری با تغییر صدک منطقه نمونه برداری ، S. خطوط روند لگاریتمی به صدک ۹۹ (خط پیوسته سیاه) و میانگین (خط آبی چین خورده) اشاره دارد. مقادیر |ρ| از H CHM با استفاده از منحنی روند نمایی، منحنی های درون یابی پایین و بالا برآورد می شوند. در پانل های بالا، ( الف ) AGB ، ( ب ) AGB U ، و ( ج ) AGB L (پانل های بالایی). در پانل های میانی، ( d ) V ، ( e ) VU , و ( f ) V L ; در پانل های پایین، ( g ) G ، ( h ) GU ، و ( i ) G L. یک خط افقی آبی نشان دهنده خطای قابل قبول ۲۰٪ است.