کلید واژه ها:
بهینه سازی مسیریابی گشت ; مدیریت شهر هوشمند ؛ طبقه بندی بخش جاده ; الگوریتم ژنتیک
۱٫ مقدمه
۲٫ بررسی ادبیات
۲٫۱٫ برنامه ریزی گشت در مدیریت شهر هوشمند
۲٫۲٫ بهینه سازی مسیر در Street Patrol
۲٫۳٫ کاربرد الگوریتم ژنتیک در مسئله مسیریابی خودرو
۳٫ مشکل SPRP در مدیریت شهر هوشمند
۳٫۱٫ تعریف مشکل
متغیرهای تصمیم باینری به صورت زیر تعریف می شوند:
جایی که تیمن جو جمن جنشان دهنده مدت زمان سفر بازرسان از بخش i به j و مواردی است که در طول بخش رخ داده است منبه j، به ترتیب.
۳٫۲٫ تابع هدف
توابع هدف روی مسئله به صورت زیر آورده شده است:
۳٫۳٫ محدودیت ها
محدودیت های مشکل به صورت زیر ارائه شده است:
۴٫ الگوریتم پیشنهادی برای SPRP
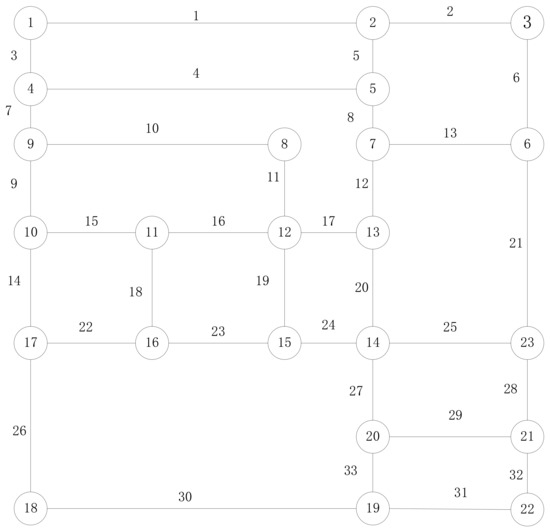
۴٫۱٫ الگوریتم طبقه بندی بخش گشت
در این بخش، بخشهای جاده را طبقهبندی میکنیم، تعداد گشتها را برای بخشهای کلیدی جاده افزایش میدهیم و دادههایی را برای مسیر شبکه، از جمله تعداد بخشهای مسیر، زمان گشت و پارامترهای اولیه برای حوادثی که در طول بخشها رخ میدهند، بهدست میآوریم. سپس، برای هر بخش جاده از ک۱به کمن، زمان گشت و نسبت حوادث را به تعداد کل حوادث تعیین می کنیم که برای تعیین آستانه اهمیت یک بخش جاده استفاده می شود. در نهایت، نسبت مسیر را با آستانه تنظیم شده مقایسه می کنیم. اگر نسبت مسیر بیشتر از آستانه باشد، بخش جاده یک بخش گشت کلیدی است و تعداد گشتها در بخش کلیدی جاده افزایش مییابد. اگر نسبت مسیر کمتر از آستانه باشد، بخش جاده یک بخش مسیر عادی در نظر گرفته می شود و تعداد عادی گشت به بخش جاده اختصاص می یابد. مراحل خاص در الگوریتم ۱ توضیح داده شده است.
| الگوریتم ۱: الگوریتم طبقه بندی مسیر گشت |
| ۱: ورودی : ک۱ ←تعداد گشت ها برای بخش i. مآایکسک←حداکثر تعداد قطعه جاده؛ تیمن←زمان گشت برای بخش جاده i; جمن←تعداد حوادث رخ داده در بخش جاده i; مآایکستیمنMax_ti←حداکثر زمان گشت برای بخش جاده i; ممنnتیمن←حداقل زمان گشت برای بخش جاده i; مآایکسجمن←حداکثر تعداد حوادث رخ داده در جاده i. ممنnجمن←حداقل تعداد حوادث رخ داده در بخش جاده i. nک←تعداد گشتها برای بخشهای جادهای معمولی؛ k←تعداد گشتهای اضافی برای بخشهای کلیدی؛ ۲: تکرار: ۳: مآایکسک←آخرین بخش؛ ۴: اگر کمن≤ مآایکسک، سپس کمن=کمن+ ۱ ۵: برای هر داده از بخش گشت ۶: اگر جمن≥ a (مآایکسجمنممنnتیمن–ممنnجمنمآایکسجمن) سپس ۷: این بخش را به عنوان بخش گشت زنی کلیدی مسیر ۸ تنظیم کنید: nک=nک+ k; ۹: else ۱۰: این بخش را به عنوان یک مسیر معمولی بخش گشت تنظیم کنید. ۱۱: پایان اگر ۱۲: پایان برای ۱۳: پایان اگر ۱۴: تا کمن≥ Mآایکسک; |
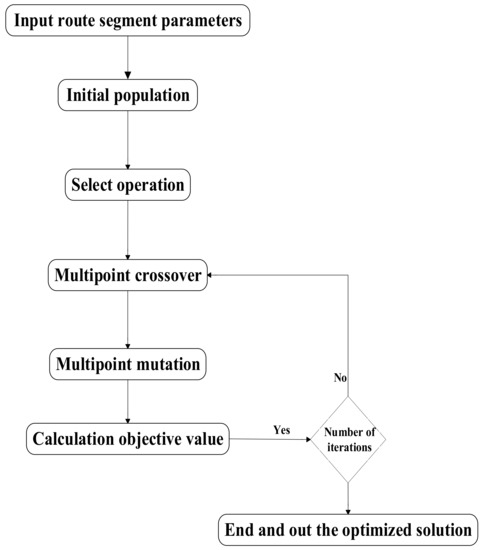
۴٫۲٫ الگوریتم ژنتیک
۴٫۲٫۱٫ طرح رمزگذاری
۴٫۲٫۲٫ عملیات متقاطع
روش دقیق در الگوریتم ۲ ارائه شده است.
| الگوریتم ۲: اپراتور متقاطع |
| ۱: ورودی: والد ۱←مسیر ۱ انتخاب شده از جمعیت. والدین ۲←مسیر ۲ متفاوت از والدین ۱ انتخاب شده از جمعیت. آn←یک بخش جاده انتخاب شده از مسیر ۱٫ بn←یک بخش جاده انتخاب شده از مسیر ۲٫ ۲: والد ۱ و والد ۲ را از جمعیت انتخاب کنید. ۳: بخش را انتخاب کنید آn از والد ۱ و مسیر بn از والدین ۲; ۴: انتخاب نقاط تقاطع در کروموزوم ها. ۵: بخش an و segment را مبادله کنید بnدر والد ۱ و والد ۲; ۶: پس از انجام مبادله، قطعه an1 و قطعه bn1 تولید کنید. ۷: برای مقایسه بین مسیر مبادله شده و مسیر اصلی ۸ را انجام دهید : برای بخش گم شده ۹ را انجام دهید : اگر بخش های جاده در طول مسیر به هم متصل هستند، ۱۰ : بخش های گم شده را اضافه کنید. ۱۱: else پس از تقسیم مسیر به بخش های متصل، بخش های گم شده را اضافه کنید. ۱۲: پایان اگر ۱۳: برای قطعه زائد ۱۴ را انجام دهید : اگر قطعه در یک نقطه غیرتغییر ظاهر شود، سپس ۱۵: بخش های اضافی جاده را در نقطه غیرتبادل حذف کنید. ۱۶: پایان اگر ۱۷: پایان برای ۱۸: پایان برای ۱۹: پایان برای ۲۰: مسیر تست عقلانیت داخلی. ۲۱: مسیر اصلی را با آn1و بn2; ۲۲: به روز رسانی والدین ۱ و والدین ۲٫ |
۴٫۲٫۳٫ عملیات جهش
روش دقیق در الگوریتم ۳ ارائه شده است.
| الگوریتم ۳: عملگر جهش |
| ۱: ورودی: راه حل←مسیر ۳ در جمعیت پس از عملیات متقاطع. جn←بخش جاده انتخاب شده از مسیر ۳٫ نقاط جهش←نقاط جهش در کروموزوم ها را انتخاب کنید. f( تی )←عملکرد تناسب اندام؛ ۲: بخش های جاده را از کروموزوم ها به عنوان بخش های مختلف جاده انتخاب کنید. ۳: یک بخش جاده را انتخاب کنید جnاز بخش های جاده به بهره برداری; ۴: یک نقطه جهش در کروموزوم را انتخاب کنید. ۵: بخش جاده را استخراج کنید جnو این بخش را با سایر بخش های جاده ترکیب کنید. ۶: تکرار ۷: برای جn← n8 را انجام دهید : تابع تناسب اندام را تحت برنامه های مسیر مختلف محاسبه کنید. ۹: کروموزوم های جهش یافته را بر اساس مقدار تابع تناسب مرتب کنید f( تی ); ۱۰: ترکیب بخش جاده را با حداکثر مقدار انتخاب کنید f( تی ); ۱۱: تست عقلانیت داخلی مسیر را انجام دهید. ۱۲: نقطه جهش را به روز کنید. ۱۳: به روز رسانی جمعیت; |
۵٫ نتایج تجربی و تجزیه و تحلیل
۵٫۱٫ داده ها و پارامترها
۵٫۲٫ ارزیابی الگوریتم
ما کیفیت یک راه حل را با استفاده از D مختلف ارزیابی می کنیم که به صورت زیر تعریف می شود:
جایی که ایکسمنتعداد بخشهای یک مسیر، n تعداد کل مسیرها و ایکس¯میانگین تعداد قطعات جاده است. راه حل تولید شده توسط الگوریتم گشت بر اساس مناطق کلیدی برای تعیین واریانس استفاده می شود. الگوریتمی با مقدار D کمتر کارآمدتر است.
برای ارزیابی عملکرد الگوریتم می توان از شکاف کران پایین (LBG) استفاده کرد که به صورت زیر تعریف می شود:
جایی که Lm a x( R )طول طولانی ترین بخش جاده است و Lm i n( R )طول کوتاه ترین بخش جاده است. الگوریتمی با مقدار LBG بالاتر کارآمدتر است. جدول ۲ مقدار هدف، D و LBG را در سه سناریوی مختلف نشان می دهد. مقادیر الگوریتم در سه سناریو تغییر چندانی نمی کند. نتایج نشان میدهد که الگوریتم DP-MOGA عملکرد پایداری دارد.
۵٫۳٫ تحلیل مقایسه ای
۶٫ نتیجه گیری و کار آینده
-
ارزیابی الگوریتم از طریق محاسبه مقادیر واریانس نشان میدهد که DP-MOGA در سه سناریو عملکرد پایداری دارد.
-
الگوریتم DP-MOGA بهتر از الگوریتم MOGA و الگوریتم VLNS عمل می کند.
-
در زندگی واقعی، مدل پیشنهادی در این مقاله تخصیص پرسنل و مسیرهای گشت بازرسان شهری را بهینه میکند. این مدل کارایی گشت زنی را برای بازرسان بهبود می بخشد.
منابع
- دامری، ر.پ. Cocchia، A. شهر هوشمند و شهر دیجیتال: بیست سال تکامل اصطلاحات. در مجموعه مقالات کنفرانس X فصل ایتالیایی AIS، ITAIS، میلان، ایتالیا، ۱۴ دسامبر ۲۰۱۳; صص ۱-۸٫ [ Google Scholar ]
- هال، RE; باورمن، بی. براورمن، جی. تیلور، جی. تودوسو، اچ. Von Wimmersperg، U. چشم انداز یک شهر هوشمند . آزمایشگاه ملی بروکهاون: آپتون، نیویورک، ایالات متحده آمریکا، ۲۰۰۰٫ [ Google Scholar ]
- سو، ک. لی، جی. فو، اچ. شهر هوشمند و برنامه های کاربردی. در مجموعه مقالات کنفرانس بین المللی ۲۰۱۱ در الکترونیک، ارتباطات و کنترل (ICECC)، نینگبو، چین، ۹ تا ۱۱ سپتامبر ۲۰۱۱٫ ص ۱۰۲۸-۱۰۳۱٫ [ Google Scholar ]
- کاراگلیو، ا. دل بو، سی. Nijkamp، P. شهرهای هوشمند در اروپا. J. فناوری شهری. ۲۰۱۱ ، ۱۸ ، ۶۵-۸۲٫ [ Google Scholar ] [ CrossRef ]
- چورابی، ح. نام، تی. واکر، اس. گیل-گارسیا، جی آر. ملولی، س. ناهون، ک. پاردو، TA; Scholl, HJ درک شهرهای هوشمند: یک چارچوب یکپارچه. در مجموعه مقالات چهل و پنجمین کنفرانس بین المللی هاوایی در علوم سیستمی در سال ۲۰۱۲، مائوئی، HI، ایالات متحده آمریکا، ۴ تا ۷ ژانویه ۲۰۱۲٫ صص ۲۲۸۹-۲۲۹۷٫ [ Google Scholar ]
- لی، ی. لی، ی. Li, J. یک برنامه کاربردی و سیستم مدیریت شهر هوشمند. در مجموعه مقالات کنفرانس بین المللی انفورماتیک صنعتی و مهندسی کامپیوتر، شانشی، چین، ۱۰–۱۱ ژانویه ۲۰۱۵٫ صفحات ۱۶۲۶-۱۶۳۰٫ [ Google Scholar ]
- رپتی، ا. مدل مجموعه شاخص های رابطه ای برای برنامه ریزی و مدیریت کاربری زمین شهری: رویکرد و کاربرد روش شناختی در دو مطالعه موردی. Landsc. طرح شهری. ۲۰۰۶ ، ۷۷ ، ۱۹۶-۲۱۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بارلتا، VS; کایوانو، دی. دیمارو، جی. Nannavecchia، A.; Scalera، M. مدیریت یک مدل یکپارچه شهر هوشمند از طریق مدیریت برنامه هوشمند. Appl. علمی ۲۰۲۰ ، ۱۰ ، ۷۱۴٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پترولو، آر. لوسکری، وی. میتون، ن. به سوی یک شهر هوشمند مبتنی بر ابر چیزها، نظرسنجی در مورد چشم انداز و پارادایم های شهر هوشمند. ترانس. ظهور. مخابرات تکنولوژی ۲۰۱۷ ، ۲۸ ، e2931. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، ی. ژان، ز. زو، دی. چای، ی. Xiujun، MA; Lun، WU ترکیب چند منبع داده های جغرافیایی بزرگ برای حس الگوهای ناهمگونی فضایی در یک فضای شهری. Geomat. Inf. علمی دانشگاه ووهان ۲۰۱۸ ، ۴۳ ، ۳۲۷-۳۳۵٫ [ Google Scholar ] [ CrossRef ]
- کامرو، آ. آلبا، ای. شهر هوشمند و فناوری اطلاعات: بررسی. شهرها ۲۰۱۹ ، ۹۳ ، ۸۴–۹۴٫ [ Google Scholar ] [ CrossRef ]
- ارمی، م. توما، ال. Sanduleac, M. مفهوم شهر هوشمند در قرن بیست و یکم. Procedia Eng. ۲۰۱۷ ، ۱۸۱ ، ۱۲-۱۹٫ [ Google Scholar ] [ CrossRef ]
- هاشم، IAT; چانگ، وی. Anuar، NB; آدوول، ک. یعقوب، ط. گانی، ع. احمد، ای. Chiroma، H. نقش داده های بزرگ در شهر هوشمند. بین المللی J. Inf. مدیریت ۲۰۱۶ ، ۳۶ ، ۷۴۸-۷۵۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زوبیزارتا، آی. سراوالی، ع. Arrizabalaga، S. مفهوم شهر هوشمند: چیست و چه باید باشد. ج. طرح شهری. توسعه دهنده ۲۰۱۶ , ۱۴۲ , ۰۴۰۱۵۰۰۵٫ [ Google Scholar ] [ CrossRef ]
- هائو، ال. لی، ایکس. یان، ز. ChunLi، Y. تحقیق کاربردی و پیاده سازی شهر هوشمند در چین. در مجموعه مقالات کنفرانس بین المللی علوم و مهندسی سیستم ۲۰۱۲ (ICSSE)، دالیان، چین، ۳۰ ژوئن تا ۲ ژوئیه ۲۰۱۲٫ صص ۲۸۸-۲۹۲٫ [ Google Scholar ]
- Jun, W. تحقیق در مورد چارچوب سیستم عامل شهر هوشمند بر اساس فناوری اطلاعات و ارتباطات جدید. صبح. جی آرتیف. هوشمند ۲۰۲۰ ، ۴ ، ۳۶-۴۱٫ [ Google Scholar ] [ CrossRef ]
- لاو، HC; Gunawan، A. مسئله زمانبندی گشت. در مجموعه مقالات کنفرانس بینالمللی روی تمرین و تئوری زمانبندی خودکار (PATAT)، پسر، نروژ، ۲۹ تا ۳۱ اوت ۲۰۱۲٫ [ Google Scholar ]
- جو، EE پلیس شهر هوشمند. بین المللی J. Law Context ۲۰۱۹ ، ۱۵ ، ۱۷۷-۱۸۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Ahr, D. کمک به مشکلات چند پستچی. دکتری پایان نامه، دانشگاه هایدلبرگ، هایدلبرگ، آلمان، ۲۰۰۴٫ [ Google Scholar ]
- دیوینتر، م. وندویور، سی. واندر بکن، تی. ویتلوکس، اف. تحلیل مشکل مسیریابی گشت پلیس: بررسی. ISPRS Int. J. Geo-Inf. ۲۰۲۰ ، ۹ ، ۱۵۷٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- واین، ن. آریل، ب. ردیابی گشت پلیس. سیاسی J. سیاست عمل. ۲۰۱۴ ، ۸ ، ۲۷۴-۲۸۳٫ [ Google Scholar ] [ CrossRef ]
- Chainey، SP; ماتیاس، جی. Nunes Junior، FCF; کوئیلو داسیلوا، TL; de Macêdo، JAF; Magalhães، RP; د کی روش نتو، جی اف. سیلوا، دبلیو. بهبود ایجاد مسیرهای گشت پلیس نقطه داغ: مقایسه عملکرد اکتشافی شناختی با رویکرد محاسبات فضایی خودکار. ISPRS Int. J. Geo-Inf. ۲۰۲۱ ، ۱۰ ، ۵۶۰٫ [ Google Scholar ] [ CrossRef ]
- آنسلین، ال. گریفیث، ای. تیتا، جی. نقشه برداری جرم و تجزیه و تحلیل نقطه داغ. در جرم شناسی محیطی و تحلیل جرم ; ویلان: ابینگدون، بریتانیا، ۲۰۱۳; صص ۱۱۹-۱۳۸٫ [ Google Scholar ]
- کالوو، اچ. گودوی- کالدرون، اس. مورنو-آرمنداریز، MA; بهینه سازی مسیرهای گشت زنی مارتینز-هرناندز، VM با استفاده از کلونی مورچه ها. در مجموعه مقالات کنفرانس مکزیک در مورد شناسایی الگوها، مکزیکو سیتی، مکزیک، ۲۴-۲۷ ژوئن ۲۰۱۵٫ صص ۳۰۲-۳۱۲٫ [ Google Scholar ]
- چنگ، ال. ژونگ، ال. تیان، اس. Xing, J. الگوریتم تعیین تکلیف برای گشت جاده ای توسط پهپادهای متعدد با پایه های متعدد و استقامت قابل شارژ. دسترسی IEEE ۲۰۱۹ ، ۷ ، ۱۴۴۳۸۱–۱۴۴۳۹۷٫ [ Google Scholar ] [ CrossRef ]
- فو، ی. زنگ، ی. وانگ، دی. ژانگ، اچ. گائو، ی. لیو، ی. تحقیق در مورد بهینه سازی مسیر بر اساس الگوریتم چند عاملی و ژنتیک برای گشت جامعه. در مجموعه مقالات کنفرانس بین المللی ۲۰۲۰ در علوم مهندسی و مدیریت شهری (ICUEMS)، زوهای، چین، ۲۴-۲۶ آوریل ۲۰۲۰؛ صص ۱۱۲-۱۱۶٫ [ Google Scholar ]
- شن، ایکس. سانگ، ج. سان، ی. لیو، آر. کاربرد الگوریتم کلنی مورچه بهبود یافته در برنامه ریزی مسیر گشت زنی شبکه توزیع. در مجموعه مقالات هفتمین کنفرانس بین المللی IEEE 2016 در زمینه مهندسی نرم افزار و علوم خدمات (ICSESS)، پکن، چین، ۲۶ تا ۲۸ اوت ۲۰۱۶؛ صص ۵۶۰-۵۶۳٫ [ Google Scholar ]
- ایلجازی، وی. میلیچ، ن. میلیدراگوویچ، دی. پوپوویچ، ب. ارزیابی ادراک افسران پلیس از نقاط داغ: برای بهبود آگاهی موقعیتی افسر چه کاری می توان انجام داد؟ ISPRS Int. J. Geo-Inf. ۲۰۱۹ ، ۸ ، ۲۶۰٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Dantzig، GB; Ramser, JH مشکل دیسپاچینگ کامیون. مدیریت علمی ۱۹۵۹ ، ۶ ، ۸۰-۹۱٫ [ Google Scholar ] [ CrossRef ]
- التابیب، AM; محسن، ع.م. Ghalab, A. یک الگوریتم هیبریدی کرم شب تاب بهبود یافته برای مشکل مسیریابی وسیله نقلیه با ظرفیت. Appl. محاسبات نرم. ۲۰۱۹ ، ۸۴ ، ۱۰۵۷۲۸٫ [ Google Scholar ] [ CrossRef ]
- جندرو، م. لاپورت، جی. پوتوین، جی.-ای. فراابتکاری برای VRP دارای ظرفیت. در مسئله مسیریابی خودرو ؛ SIAM: Philadelphia, PA, USA, 2002; صص ۱۲۹-۱۵۴٫ [ Google Scholar ]
- لاپورت، جی. Semet، F. اکتشافی کلاسیک برای VRP دارای ظرفیت. در مسئله مسیریابی خودرو ؛ SIAM: Philadelphia, PA, USA, 2002; صص ۱۰۹-۱۲۸٫ [ Google Scholar ]
- شیائو، ی. ژائو، کیو. کاکو، آی. Xu, Y. توسعه یک مدل بهینهسازی مصرف سوخت برای مشکل مسیریابی خودروی ظرفیتدار. محاسبه کنید. اپراتور Res. ۲۰۱۲ ، ۳۹ ، ۱۴۱۹-۱۴۳۱٫ [ Google Scholar ] [ CrossRef ]
- هو، SC; Haugland, D. یک جستجوی اکتشافی تابو برای مشکل مسیریابی وسیله نقلیه با پنجره های زمانی و تحویل تقسیم شده. محاسبه کنید. اپراتور Res. ۲۰۰۴ ، ۳۱ ، ۱۹۴۷-۱۹۶۴٫ [ Google Scholar ] [ CrossRef ]
- Karaoglan، AD; آتالای، من. Kucukkoc، I. مشکلات مسیریابی وسیله نقلیه محدود شده از راه دور: مطالعه موردی با استفاده از الگوریتم کلونی زنبور عسل مصنوعی. در مدلسازی ریاضی و بهینه سازی مسائل مهندسی ; Springer: Cham، سوئیس، ۲۰۲۰؛ صص ۱۵۷-۱۷۳٫ [ Google Scholar ]
- ناگاراجان، وی. Ravi, R. الگوریتم های تقریب برای مسایل مسیریابی خودرو با محدودیت فاصله. Networks ۲۰۱۲ ، ۵۹ ، ۲۰۹-۲۱۴٫ [ Google Scholar ] [ CrossRef ]
- عفیفی، س. دانگ، دی.-سی. Moukrim، A. الگوریتم بازپخت شبیه سازی شده برای مسئله مسیریابی وسیله نقلیه با پنجره های زمانی و محدودیت های همگام سازی. در مجموعه مقالات کنفرانس بین المللی یادگیری و بهینه سازی هوشمند، کاتانیا، ایتالیا، ۷-۱۱ ژانویه ۲۰۱۳٫ صص ۲۵۹-۲۶۵٫ [ Google Scholar ]
- توث، پی. ویگو، دی. مسئله مسیریابی خودرو: انجمن ریاضیات صنعتی و کاربردی. سیام مونوگر. گسسته. ریاضی. Appl. ۲۰۰۱ . [ Google Scholar ] [ CrossRef ]
- موسولینو، جی. ریندون، سی. Vitetta، A. جابجایی مسافران و بار با وسایل نقلیه الکتریکی: روشی برای برنامه ریزی حمل و نقل سبز و خدمات لجستیکی در نزدیکی مناطق بندری. ترانسپ Res. Procedia ۲۰۱۹ ، ۳۷ ، ۳۹۳-۴۰۰٫ [ Google Scholar ] [ CrossRef ]
- موسولینو، جی. ریندون، سی. Vitetta، A. یک چارچوب مدل سازی برای شبیه سازی مسیرها و مسیرهای انتخاب وسایل نقلیه باری در مناطق حومه شهری. در مجموعه مقالات هفتمین کنفرانس بین المللی ۲۰۲۱ در مورد مدل ها و فناوری ها برای سیستم های حمل و نقل هوشمند (MT-ITS)، هراکلیون، یونان، ۱۶-۱۷ ژوئن ۲۰۲۱؛ صص ۱-۶٫ [ Google Scholar ]
- لین، جی. ژو، دبلیو. Wolfson، O. مشکل مسیریابی وسایل نقلیه الکتریکی. ترانسپ Res. Procedia ۲۰۱۶ ، ۱۲ ، ۵۰۸-۵۲۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- موسولینو، جی. پولمنی، ع. Vitetta، A. مسیریابی وسیله نقلیه باری با زمان سفر پیوند قابل اعتماد: روشی مبتنی بر نمودار اساسی شبکه. ترانسپ Lett. ۲۰۱۸ ، ۱۰ ، ۱۵۹-۱۷۱٫ [ Google Scholar ] [ CrossRef ]
- پولمنی، ع. Vitetta، A. مسیریابی خودرو در مناطق شهری: یک رویکرد بهینه با کالیبراسیون تابع هزینه. ترانسپ B Transp. دین ۲۰۱۴ ، ۲ ، ۱-۱۹٫ [ Google Scholar ] [ CrossRef ]
- میرجلیلی، س. الگوریتم های تکاملی و شبکه های عصبی. در مطالعات هوش محاسباتی ; Springer: برلین، آلمان، ۲۰۱۹؛ جلد ۷۸۰٫ [ Google Scholar ]
- وانگ، اس.-سی. الگوریتم ژنتیک. در محاسبات بین رشته ای در برنامه نویسی جاوا ; Springer: برلین، آلمان، ۲۰۰۳; صص ۱۰۱-۱۱۶٫ [ Google Scholar ]
- جئون، جی. لیپ، منابع انسانی؛ Shim, JY یک مشکل مسیریابی وسیله نقلیه که با استفاده از یک الگوریتم ژنتیک ترکیبی حل شده است. محاسبه کنید. مهندس ۲۰۰۷ ، ۵۳ ، ۶۸۰-۶۹۲٫ [ Google Scholar ] [ CrossRef ]
- برگر، جی. Barkaoui، M. یک الگوریتم ژنتیک ترکیبی برای مسئله مسیریابی وسیله نقلیه با ظرفیت. در مجموعه مقالات کنفرانس محاسبات ژنتیکی و تکاملی، شیکاگو، IL، ایالات متحده آمریکا، ۱۲-۱۶ ژوئیه ۲۰۰۳٫ صص ۶۴۶-۶۵۶٫ [ Google Scholar ]
- ژو، دبلیو. آهنگ، تی. او، اف. لیو، ایکس. مسئله مسیریابی وسیله نقلیه چند هدفه با تعادل مسیر بر اساس الگوریتم ژنتیک. گسسته. دین نات. Soc. ۲۰۱۳ ، ۲۰۱۳ ، ۳۲۵۶۸۶٫ [ Google Scholar ] [ CrossRef ]
- لو، ی. یین، ی. Lawphongpanich، S. برنامه ریزی استقرار گشت خدمات آزادراه برای مدیریت حادثه و کاهش ازدحام. ترانسپ Res. قسمت C Emerg. تکنولوژی ۲۰۱۱ ، ۱۹ ، ۲۸۳-۲۹۵٫ [ Google Scholar ] [ CrossRef ]
- متیو، الگوریتم ژنتیک تلویزیون. گزارش ؛ ارسال شده در IIT Bombay؛ IIT Bombay: Powai، هند، ۲۰۱۲٫ [ Google Scholar ]
- دب، ک. پراتاپ، ا. آگاروال، اس. میاریوان، تی. الگوریتم ژنتیک چندهدفه سریع و نخبه: NSGA-II. IEEE Trans. تکامل. محاسبه کنید. ۲۰۰۲ ، ۶ ، ۱۸۲-۱۹۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- موراتا، تی. Ishibuchi، H. MOGA: الگوریتم های ژنتیک چند هدفه. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد محاسبات تکاملی، پرت، استرالیا، ۲۹ نوامبر تا ۱ دسامبر ۱۹۹۵٫ ص ۲۸۹-۲۹۴٫ [ Google Scholar ]