کلید واژه ها:
موقعیت یابی داخلی ؛ هسته ماشین یادگیری افراطی ; فیلتر ذرات ؛ مدل مشاهده بازسازی شده
۱٫ مقدمه
۲٫ Kernel Extreme Learning Machine
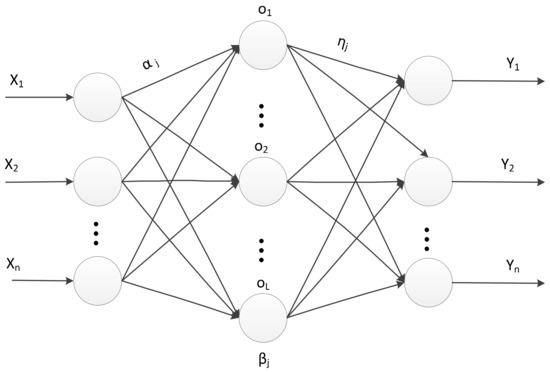
همانطور که در شکل ۱ نشان داده شده است ، برای (ایکسمن،yمن)با nنمونه هایی که در آن ایکسمن=[ایکسمن ۱،ایکسمن ۲، ⋯ایکسمن n]تی، yمن=[yمن ۱،yمن ۲، ⋯yمن n]تی∈آرn، SLFN با Lگره های لایه پنهان را می توان به این صورت توصیف کرد
جایی که αj=[αj ۱،αj ۲، ⋯ ،αj n]تیو βjوزن ورودی و آستانه نورون لایه پنهان هستند. ηj=[ηj ۱،ηj ۲، ⋯ηj n]تیوزن اتصال بین نورون j ام در لایه پنهان و خروجی است و ψ ( x )تابع فعال سازی نورون های لایه پنهان است.
فرمول (۱) دارای شکل ماتریسی به شرح زیر است:
جایی که
و η=[η۱،η۲، ⋯ ،ηL]تیL × n، ی=[y1،y2، ⋯ ،yn]تی.
از آنجایی که وزن های ورودی به صورت تصادفی تولید می شوند، آستانه نورون لایه پنهان نیز می تواند به صورت تصادفی تولید شود و نیازی به تنظیم نیست. Ψ. وزن اتصال ηبین لایه مخفی و خروجی با حل فرمول زیر به دست می آید:
سپس:
جایی که Ψ†ماتریس معکوس تعمیم یافته مور پنروز است Ψ[ ۳۲ ، ۳۳ ].
KELM شبکه را با معیار وزن خروجی آموزش می دهد و خطای تمرین را به حداقل می رساند. سپس، از تئوری بهینه سازی استاندارد، حداقل سازی به دست آمده را می توان به صورت زیر نوشت:
جایی که سیپارامتر منظم سازی است و ϑمنصدای تمرین است.
از نظریه کاروش کوهن تاکر (KKT) [ ۳۴ ]، مسئله فوق را می توان به مسئله بهینه سازی فرمول (۷) تبدیل کرد:
جایی که ξمنعملگر لاگرانژ است.
با حل مسئله بهینه سازی فرمول فوق به دست می آید:
جایی که ξ=[ξ۱،ξ۲، ⋯ ،ξn]تی.
با جایگزینی (۸) و (۹) به (۱۰)، آن را حفظ می کند
ک(ایکسمن،ایکسj) =ψ (ایکسمن) ⋅ψ(ایکسj)تی( i , j = ۱ , ۲ , ⋯ , n) تابع هسته است، خروجی لایه پنهان KELM را می توان به صورت زیر نوشت:
با توجه به شرط Mercer [ ۳۵ ]، فرمول فوق را می توان به صورت زیر نوشت:
که در آن، تابع هسته RBF گاوسی زیر [ ۲۹ ، ۳۰ ] استفاده می شود:
با پارامتر تابع هسته گاوسی RBF γ.
۳٫ الگوریتم موقعیت یابی داخلی بر اساس مدل مشاهده بازسازی شده و PF
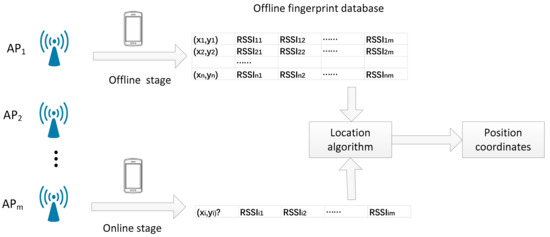
۳٫۱٫ اصل الگوریتم موقعیت یابی داخلی بر اساس مکان اثر انگشت
فرض کنید که nتعداد نمونه داده های جمع آوری شده و مترتعداد AP با گره ناشناخته دریافت کننده قدرت سیگنال است، ماتریس ورودی KELM را می توان به صورت زیر توصیف کرد:
وزن ورودی با L-مین گره های پنهان عبارتند از:
خروجی شبکه ها را می توان به صورت زیر بیان کرد:
بنابراین، مدل KELM ساخته شده به شرح زیر است:
جایی که G(⋅)رابطه نگاشت بین مختصات موقعیت گره های ناشناخته به دست آمده توسط آموزش KELM و قدرت سیگنال هر نقطه AP دریافت شده توسط گره های ناشناخته است.
۳٫۲٫ استراتژی محلی سازی فیلتر ذرات و کنترل فاکتور دریافت
تعیین مکان گره های ناشناخته در داخل خانه را می توان به عنوان یک فرآیند احتمال تصادفی در نظر گرفت. بنابراین، یک الگوریتم PF [ ۳۸ ] برای موقعیت یابی استفاده می شود. در محیط داخلی، mAP ها با مکان های شناخته شده باید توزیع شوند. ایجاد یک مدل فضای پویا قبل از استفاده از فیلتر ذرات برای حل مکان گره ناشناخته ضروری است. وضعیت موقعیت گره های ناشناخته تقریباً به صورت زیر مدل می شود:
جایی که ایکسمن=[ایکسمن،yمن]تیمختصات دو بعدی گره های مجهول است و اف= [۱۰۰۱]ماتریس انتقال حالت گسسته است و تومن – ۱نویز فرآیند پیروی از توزیع گاوسی است.
مدل مشاهده با فرمول KELM (18) ساخته شده است:
جایی که اچ= [۱۰۰۱]نشان دهنده ماتریس خروجی و υمننویز مشاهده است.
روش های ذکر شده در بالا در مورد روش های موقعیت یابی داخلی مبتنی بر KELM-PF فرض می کند که گره های ناشناخته سیستم موقعیت یابی می توانند به طور معمول و کاملاً قدرت سیگنال همه AP ها را دریافت کنند. با این حال، در شرایط پیچیده داخلی، انتقال سیگنال توسط دیوارها، میزها، صندلی ها، پارتیشن ها و موانع دیگر مسدود می شود و گره های ناشناخته نمی توانند قدرت سیگنال همه گره ها را به طور همزمان دریافت کنند، بنابراین از دست دادن بخشی از آن اجتناب ناپذیر است. داده های APs بنابراین نحوه طراحی سیستم مکان یابی در صورت از دست دادن تصادفی داده ها در سیستم موقعیت یابی بی سیم دارای ارزش عملی زیادی است. در حال حاضر، نتایج تحقیقات کمی در مورد این مشکل وجود دارد. مرجع [ ۳۹] یک فیلتر قوی برای مدل FM یک سیستم دوبعدی در صورت از دست دادن داده طراحی کرد. با این حال، برای فیلتر کردن تحت شرایطی که از دست دادن داده بر اساس الگوریتم موقعیت یابی داخلی KELM-PF، مشکل هنوز مطالعه نشده است. این مقاله یک استراتژی کنترل را با معرفی یک عامل دریافت پیشنهاد می کند Eبرای وضعیتی که گره های ناشناخته در سیستم موقعیت یابی بی سیم نمی توانند داده های همه AP ها را دریافت کنند، یعنی از دست دادن داده ها رخ می دهد.
| الگوریتم ۱٫ موقعیت یابی داخلی مبتنی بر PF. |
| پیش بینی: ایکسمن= افایکسمن – ۱; اندازه گیری پیش بینی شده: Γمن= اچزمن(ایکسمن،yمن); ورودی: یک آستانه تعیین کنید نتی ساعت; برای ذره k = ۱ :نپ نمونه برداری گاوسی را انجام دهید :{ایکسکمن}نپk = ۱= p (ایکسمن∣ایکسکمن – ۱); وزن هر ذره را محاسبه کنید wکمن=wکمن – ۱p (Γمن∣ایکسکمن) p (ایکسکمن∣ایکسکمن – ۱)q(ایکسکمن∣ایکسکمن – ۱،Γ۱ : من); پایان برای عادی سازی: wˆکمن=wکمن/∑k = ۱نپwکمن; نمونه برداری مهم: نv ص=(∑k = ۱نپ(ωکمن)۲)– ۱; اگر نv ص>نتی ساعت, نمونه برداری مهم; پایان اگر برآورد حالت: ایکسˆمن(ایکسمن،yمن) ≈∑k = ۱نپwˆکمنایکسمن. |
در سیستم موقعیت یابی داخلی که در بالا ذکر شد، مترAP ها تنظیم شده اند. در منبار – قدرت سیگنال گره ناشناخته ای که می تواند دریافت کند مترAPهای مستقر شده، که به عنوان نشان داده شده است آرمن= ( R Sاسمنمن ۱، آر اساسمنمن ۲، ⋯ ، آر اساسمنمن _),(i=1,2,⋯,N). تعداد داده های AP دریافت شده توسط گره ناشناخته با نشان داده می شود nr. سپس یک عامل پذیرش Eبر اساس معرفی شده است nr: اگر nr<3، سپس تنظیم کنید E=0و الگوریتم موقعیت یابی داخلی از داده های تمام APهای دریافتی در لحظه قبل برای محاسبه PF استفاده می کند. اگر nr≥۳، سپس تنظیم کنید E=1. سپس از الگوریتم KELM-PF برای موقعیت یابی استفاده می شود. بیان عامل دریافت Eبه شرح زیر است:
۳٫۳٫ مراحل مکان یابی داخلی تکراری بر اساس KELM-PF
الگوریتم موقعیت یابی داخلی بر اساس KELM-PF به طور مکرر مقدار تخمینی خود را از طریق الگوریتم ۲ زیر به دست می آورد.
| الگوریتم ۲٫ موقعیت یابی داخلی مبتنی بر KELM-PF |
| ورودی ها: ωj=[ωj1,ωj2,⋯,ωjn]T، βj=[βj1,βj2,⋯βjn]T، Ri، nr، m، Np، Nth، Nvp; مرحله ۱: آموزش پارامترهای وزن ωjو βjلایه پنهان و لایه خروجی KELM. مرحله ۲: از عوامل دریافت کننده استفاده کنید Eبرای تصمیم گیری: محاسبه کنید nr. اگر E=1، مرحله بعدی الگوریتم KELM-PF را انجام خواهد داد. اگر E=0، به مرحله ۴ بروید و PF مرحله قبل را اجرا کنید. مرحله ۳: الگوریتم KELM-PF را اجرا کنید، مدل مشاهده را بازسازی کنید، مقدار مشاهده را بدست آورید و مقدار تخمینی را به خروجی بدهید: put Riبرای آموزش وارد شبکه KELM شوید و مشاهدات را بدست آورید. اگر nr=m، بردار قدرت سیگنال را قرار دهید R⌢iبا تشخیص زمان واقعی در شبکه KELM برای آزمایش به دست می آید و مقدار مشاهده شده را به دست می آورد. سپس الگوریتم ذرات الگوریتم ۱ را اجرا کنید و خروجی بگیرید Xˆi(xi,yi); اگر nr<m، قدرت سیگنال گره دریافت نشده را روی ۱ تنظیم کنید و سپس تست KELM را انجام دهید. سپس الگوریتم ذرات الگوریتم ۱ را اجرا کرده و خروجی بگیرید Xˆi(xi,yi). مرحله ۴: PF مرحله قبل را اجرا می کند. |
۴٫ نتایج تجربی و تجزیه و تحلیل
۴٫۱٫ تایید اعتبار
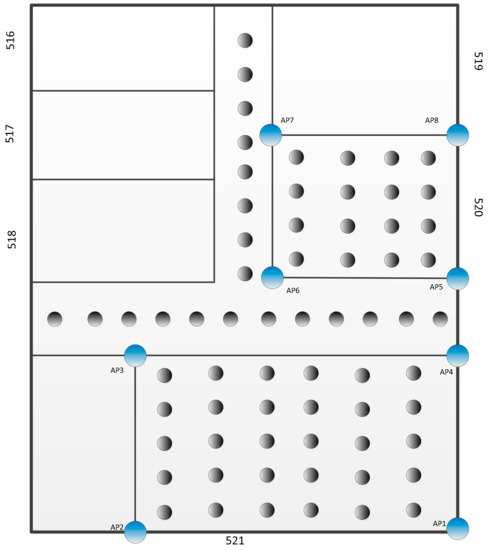
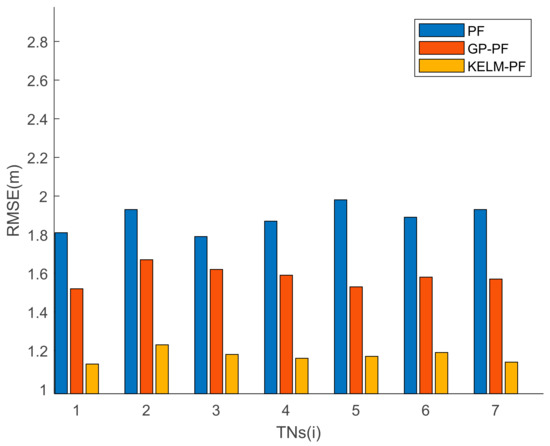
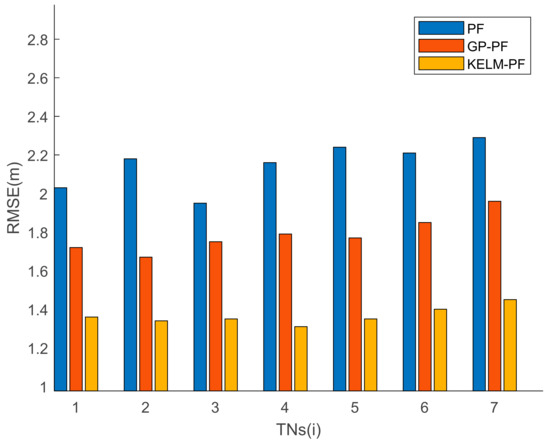
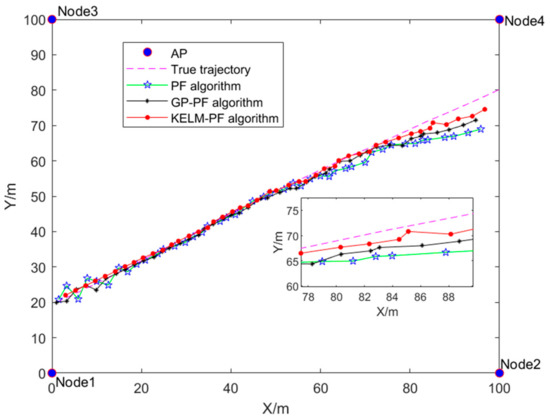
محل آزمایش، آزمایشگاه در طبقه پنجم دانشگاه است: اتاق های آزمایشگاه ۵۲۱، ۵۲۰ و راهرو بین آنها. مساحت اتاق ۵۲۱ حدود ۸۰ متر مربع ، مساحت اتاق ۵۲۰ حدود ۶۰ متر مربع و مساحت راهرو حدود ۲۰ متر مربع است که در شکل ۳ نشان داده شده است. روتر بی سیم TP-LINK TL-R860 است و هشت روتر بی سیم در اتاق ۵۲۱ و اتاق ۵۲۰ قرار داده شده است (AP1-AP8 در شکل ۳ ). ابزار اکتساب، اپلیکیشن جذب اثرانگشت وای فای است و تمام آزمایشها در Matlab 2020a اجرا میشوند. ما ۶۶ گره مرجع (RN) را راه اندازی کردیم، از جمله ۳۰ RN در اتاق ۵۲۱، ۱۶ RN در اتاق ۵۲۰ و ۲۰ RN در راهرو. فاصله بین هر RN حدود ۱٫۰ متر است. نقاط سیاه داخلشکل ۳ نشان دهنده RN های مورد استفاده برای جمع آوری مقادیر RSS در مرحله آفلاین است. در هر RN 60 نمونه با فاصله زمانی ۲ ثانیه جمع آوری می کنیم و در مجموع ۱۸۰۰۰ داده نمونه به دست می آید. همچنین تعداد نمونه های آموزشی را ۱۵۰۰۰ و نمونه تایید را ۳۰۰۰ قرار دادیم. Lروی ۱۰۰ تنظیم شده است، Cبه ۱۰ انتخاب می شود و ۸ گره به طور تصادفی برای آزمایش در اتاق های ۵۲۱، ۵۲۰ و راهرو انتخاب می شوند. سپس دقت موقعیت به دست آمده در شکل ۴ ، شکل ۵ و شکل ۶ نشان داده شده است. ریشه میانگین مربعات خطا (RMSE) بین موقعیت تخمین زده شده گره های ناشناخته و موقعیت واقعی محاسبه می شود و RMSE استاندارد ارزیابی عملکرد الگوریتم است:
که در آن M عدد گره تست (TN) است، (xi,yi)و (xio,yio)مختصات موقعیت پیش بینی شده و مختصات موقعیت واقعی گره ناشناخته را به ترتیب نشان می دهد.
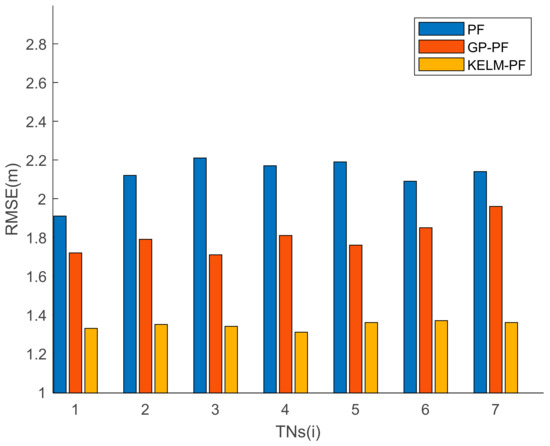
۴٫۲٫ آزمایشهای چگالی گره مرجع و دقت موقعیتیابی
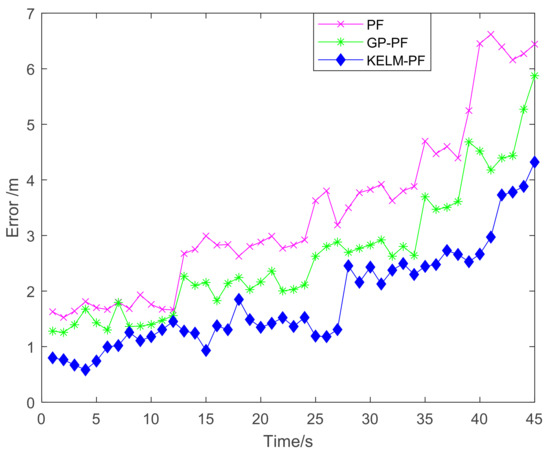
۴٫۳٫ مقایسه خطاهای موقعیت یابی زمانی که PF مدل های مشاهده متفاوتی را اتخاذ می کند
۴٫۴٫ تجزیه و تحلیل پیچیدگی محاسباتی الگوریتم های مختلف
۵٫ نتیجه گیری ها
منابع
- فیگوئل، اس. اسپچت، سی. موزینسکی، ام. استاتچنی، آ. Specht، M. تست نرم افزار برای برنامه ریزی کمپین اندازه گیری شیء خطی GNSS تحت شرایط شبیه سازی شده. Energies ۲۰۲۱ , ۱۴ , ۷۸۹۶٫ [ Google Scholar ]
- گائو، ز. جی، م. لی، ی. شن، دبلیو. ژانگ، اچ. Schuh، H. اندازهگیری بینظمی راهآهن با استفاده از سیستم همجوشی چند حسگر صاف شده Rauch–Tung–Striebel: Quad-GNSS PPP، IMU، کیلومترشمار، و گیج مسیر. راه حل GPS. ۲۰۱۸ ، ۲۲ ، ۳۶٫ [ Google Scholar ] [ CrossRef ]
- کراسوسکی، ک. Savchuk، S. تعیین مختصات دقیق ایستگاه مرجع GPS در یک سیستم GBAS در حمل و نقل هوایی. Commun.-Sci. Lett. دانشگاه زیلینا ۲۰۲۰ ، ۲۲ ، ۱۱-۱۸٫ [ Google Scholar ] [ CrossRef ]
- کاسرس ناجارو، لس آنجلس؛ آهنگ، من. تومیک، اس. کیم، کی. مکانیابی سریع با توان انتقال ناشناخته و توان افت مسیر در شبکههای بیسیم بر اساس اندازهگیریهای RSS. IEEE Commun. Lett. ۲۰۲۰ ، ۲۴ ، ۲۷۵۶-۲۷۶۰٫ [ Google Scholar ] [ CrossRef ]
- برکونز، آر. پرمانز، اچ. Weyn، M. آنتروپی شرطی و خطای مکان در محلیسازی فضای داخلی با استفاده از اثرانگشت Wi-Fi احتمالی. Sensors ۲۰۱۶ , ۱۶ , ۱۶۳۶٫ [ Google Scholar ] [ CrossRef ]
- لیو، دبلیو. چنگ، کیو. دنگ، ز. Jia, M. C-GCN: یک شبکه استخراج ویژگی فاز CSI انعطاف پذیر برای سرکوب خطا در موقعیت یابی داخلی. Entropy ۲۰۲۱ , ۲۳ , ۱۰۰۴٫ [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Xiong، W. شیندلهاور، سی. بنابراین، HC; شات، دی جی؛ Rupitsch، SJ Robust TDOA محلی سازی منبع بر اساس شبکه عصبی برنامه نویسی لاگرانژ. فرآیند سیگنال IEEE Lett. ۲۰۲۱ ، ۲۸ ، ۱۰۹۰-۱۰۹۴٫ [ Google Scholar ] [ CrossRef ]
- Hsu، HH; پنگ، WJ; Shih، TK; Pai، TW; Man, KL Smartphone Localization Indoor Indoor با شتاب سنج و ژیروسکوپ. در مجموعه مقالات کنفرانس بینالمللی سیستمهای اطلاعات مبتنی بر شبکه Nbis، سالرنو، ایتالیا، ۱۰ تا ۱۲ سپتامبر ۲۰۱۵٫ [ Google Scholar ]
- زیب، س. خسرو، س. علی، س. Alam, F. ناوبری داخلی مبتنی بر گوشی هوشمند برای افراد نابینا با استفاده از نمایه کاربر و مدل اطلاعات ساختمان ساده شده. در مجموعه مقالات کنفرانس بین المللی ۲۰۱۹ مهندسی برق، ارتباطات و کامپیوتر (ICECCE)، سوات، پاکستان، ۲۴ تا ۲۵ ژوئیه ۲۰۱۹٫ [ Google Scholar ]
- وانگ، ایکس. کین، دی. گوا، آر. ژائو، ام. ما، ال. Berhane, TM فناوری تلفنهای هوشمند به کمک نشانههای جمعسپاری در محلیسازی فضای داخلی. دسترسی IEEE ۲۰۲۰ ، ۸ ، ۵۷۰۳۶–۵۷۰۴۸٫ [ Google Scholar ] [ CrossRef ]
- لو، جی. مدلسازی و شبیه سازی مکان داخلی ربات لی، ایکس بر اساس فیلتر کالمن. EURASIP J. Wirel. اشتراک. شبکه ۲۰۱۹ ، ۲۰۱۹ ، ۱۴۰٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، جی. او، جی. پنگ، ا. ژنگ، ال. Shi, J. یک سیستم محلی سازی داخلی INS/WiFi بر اساس حداقل مربعات وزنی. Sensors ۲۰۱۸ , ۱۸ , ۱۴۵۸٫ [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- لیم، جی. Chong, U. ردیابی چند هدفه با فیلتر ذرات بر اساس اندازهگیری RSS در شبکههای حسگر بیسیم. بین المللی J. Distrib. Sens. Netw. ۲۰۱۵ ، ۱۱ ، ۸۳۷۰۷۰٫ [ Google Scholar ] [ CrossRef ]
- هونگ، اف. ژانگ، ی. ژانگ، ز. وی، ام. فنگ، ی. Guo, Z. WaP: محلیسازی و ردیابی فضای داخلی با استفاده از فیلتر ذرات به کمک WiFi. در مجموعه مقالات کنفرانس IEEE در مورد شبکه های کامپیوتری محلی، ادمونتون، AB، کانادا، ۸ تا ۱۱ سپتامبر ۲۰۱۴٫ [ Google Scholar ]
- لی، دی. ژانگ، بی. لی، سی. یک الگوریتم مقیاسبندی ویژگی مبتنی بر k-نزدیکترین همسایه برای سیستمهای موقعیتیابی داخلی. IEEE Internet Things J. ۲۰۱۶ , ۳ , ۵۹۰–۵۹۷٫ [ Google Scholar ] [ CrossRef ]
- پولوز، آ. هان، تجزیه و تحلیل عملکرد DS الگوریتمهای تطبیق اثر انگشت برای محلیسازی فضای داخلی. در مجموعه مقالات کنفرانس بین المللی هوش مصنوعی در اطلاعات و ارتباطات (ICAIIC)، فوکوکا، ژاپن، ۱۹ تا ۲۱ فوریه ۲۰۲۰٫ [ Google Scholar ]
- شیا، اس. لیو، ی. یوان، جی. زو، ام. Wang, Z. موقعیت یابی اثر انگشت داخلی بر اساس Wi-Fi: یک مرور کلی. بین المللی جی. ژئو. Inf. ۲۰۱۷ ، ۶ ، ۱۳۵٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- گولنبیوسکی، جی. Tewolde، G. پیاده سازی یک سیستم موقعیت یابی داخلی با استفاده از الگوریتم WKNN. در مجموعه مقالات نهمین کارگاه و کنفرانس سالانه محاسبات و ارتباطات IEEE (CCWC)، لاس وگاس، NV، ایالات متحده آمریکا، ۷ تا ۹ ژانویه ۲۰۱۹٫ [ Google Scholar ]
- وانگ، ز. ژانگ، ی. Song, Y. یک روش تحلیل قابلیت اطمینان مرتبه اول تطبیقی برای مسائل غیرخطی. ریاضی. مشکل مهندس ۲۰۲۰ , ۴ , ۳۹۲۵۶۸۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانگ، اچ. ژانگ، ی. هوانگ، ی. فو، اچ. Wang, Z. WKNN الگوریتم مکان داخلی بر اساس تقسیم بندی منطقه بر اساس ویژگی های فضایی و محدودیت مکان قبلی. اوباش فراگیر. محاسبه کنید. ۲۰۱۹ ، ۶۰ ، ۱۰۱۰۸۵–۱۰۱۰۹۸٫ [ Google Scholar ] [ CrossRef ]
- وانگ، دبلیو. مارلی، دی. فو، M. محلی سازی پویا داخلی با استفاده از فیلتر ذرات حداکثر احتمال. Sensors ۲۰۲۱ , ۲۱ , ۱۰۹۰٫ [ Google Scholar ] [ CrossRef ]
- المدنی، ب. اروجوف، اف. ماسکلیوناس، ر. داماشویچیوس، آر. Venčkauskas، A. سیستم محلیسازی داخلی بیسیم مبتنی بر منطق فازی نوع ۲ برای ناوبری افراد کمبینا در ساختمانها. Sensors ۲۰۱۹ , ۱۹ , ۲۱۱۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رضازاده، ج. سوبرامانیان، آر. سندرسگاران، ک. کنگ، ایکس. مرادی، م. خدامرادی، F. Novel iBeacon Placement for Indoor Positioning in IoT. IEEE Sens. J. ۲۰۱۸ ، ۱۸ ، ۱۰۲۴۰–۱۰۲۴۷٫ [ Google Scholar ] [ CrossRef ]
- گوا، ایکس. الیکپلیم، NR; انصاری، ن. لی، ال. Wang, L. بومی سازی WiFi قوی با ترکیب اثر انگشت مشتق شده RSS و طبقه بندی کننده های متعدد. IEEE Trans. Ind. اطلاع رسانی. ۲۰۲۰ ، ۱۶ ، ۳۱۷۷-۳۱۸۶٫ [ Google Scholar ] [ CrossRef ]
- فنگ، ز. کائو، ی. Yan, J. الگوریتم محلیسازی داخلی مبتنی بر قدرت سیگنال دریافتی با استفاده از تکنیک ELM و رگرسیون ریج. در مجموعه مقالات دومین کنفرانس بین المللی IEEE 2019 در زمینه فناوری اطلاعات و ارتباطات الکترونیکی (ICEICT)، هاربین، چین، ۲۰ تا ۲۲ ژانویه ۲۰۱۹٫ [ Google Scholar ]
- آهنگ، بی. وانگ، اچ. شیائو، دبلیو. هوانگ، اس. مدل فرآیند شی، ال. گاوس، فیلتر ذرات را برای محلیسازی بدون دستگاه فعال کرد. در مجموعه مقالات بیستمین کنفرانس بین المللی ۲۰۱۷ در مورد فیوژن اطلاعات (فیوژن)، شیان، چین، ۱۰ تا ۱۳ ژوئیه ۲۰۱۷٫ [ Google Scholar ]
- بای، YB; وو، اس. رتسچر، جی. کیلی، ا. هولدن، ال. تومکو، م. بوریاک، آ. هو، بی. وو، HR; Zhang, K. روشی جدید برای بهبود دقت موقعیت یابی داخلی مبتنی بر Wi-Fi. J. Locat. سرویس مبتنی بر ۲۰۱۴ ، ۸ ، ۱۳۵-۱۴۷٫ [ Google Scholar ] [ CrossRef ]
- لی، ام. ژائو، ال. تان، دی. تانگ، X. الگوریتم محلیسازی اثر انگشت BLE بر اساس تطبیق الگوی هشت محله. Sensors ۲۰۱۹ , ۱۹ , ۴۸۵۹٫ [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- هوانگ، گیگابایت؛ زو، QY; Siew، CK Extreme Learning Machine: Theory and Applications. محاسبات عصبی ۲۰۰۶ ، ۷۰ ، ۴۸۹-۵۰۱ . [ Google Scholar ] [ CrossRef ]
- لیانگ، نیویورک؛ هوانگ، گیگابایت؛ ساراچاندران، پ. Sundararajan, N. الگوریتم یادگیری متوالی آنلاین سریع و دقیق برای شبکه های پیشخور. IEEE Trans. شبکه عصبی ۲۰۰۶ ، ۱۷ ، ۱۴۱۱-۱۴۲۳٫ [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Huang, GB بینشی در مورد ماشینهای یادگیری شدید: نورونهای تصادفی، ویژگیهای تصادفی و هستهها. شناخت. محاسبه کنید. ۲۰۱۴ ، ۶ ، ۳۷۶-۳۹۰٫ [ Google Scholar ] [ CrossRef ]
- هوانگ، جی. هوانگ، گیگابایت؛ آهنگ ها.؛ شما، K. Trends in Extreme Learning Machines: A Review. شبکه عصبی ۲۰۱۵ ، ۶۱ ، ۳۲-۴۸٫ [ Google Scholar ] [ CrossRef ]
- سیمور، ال. Lipson، ML Schaum’s Outline of Linear Gebra ; تحصیلات مک گراو هیل: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۱۸٫ [ Google Scholar ]
- Vanderbei، RJ سیستم KKT. در برنامه ریزی خطی ؛ Springer Nature: Basingstoke، UK، ۲۰۲۰٫ [ Google Scholar ]
- ویبوو، ا. Desa، MI رگرسیون قوی غیرخطی با استفاده از تحلیل مولفه اصلی هسته و برآوردگرهای R. بین المللی جی. کامپیوتر. علمی شماره های ۲۰۱۱ ، ۸ ، ۷۵-۸۲٫ [ Google Scholar ]
- شو، دبلیو. کیو، دبلیو. هوآ، ایکس. Yu, K. اندازهگیری RSSI Wi-Fi بهبود یافته برای محلیسازی فضای داخلی. IEEE Sens. J. ۲۰۱۷ ، ۱۷ ، ۲۲۲۴–۲۲۳۰٫ [ Google Scholar ] [ CrossRef ]
- جیانگ، پی. ژانگ، ی. فو، دبلیو. لیو، اچ. Su, X. محلیسازی موبایل داخلی بر اساس نقطه دسترسی مهم اثر انگشت Wi-Fi. بین المللی J. Distrib. Sens. Netw. ۲۰۱۵ ، ۱۱ ، ۴۲۹۱۰۴–۴۲۹۱۲۰٫ [ Google Scholar ] [ CrossRef ]
- یین، اس. Zhu, X. فیلتر ذرات هوشمند و کاربرد آن در تشخیص خطای سیستم غیرخطی. IEEE Trans. الکترون صنعتی ۲۰۱۵ ، ۶۲ ، ۳۸۵۲-۳۸۶۱٫ [ Google Scholar ] [ CrossRef ]
- پاک، جی.ام. Ahn، CK; کشتی.؛ شمالی، ی.س. فیلتر ذرات هیبریدی/FIR توزیعشده Lim، MT برای کاهش اثرات NLOS در محلیسازی مبتنی بر TOA با استفاده از شبکههای حسگر بیسیم. IEEE Trans. الکترون صنعتی ۲۰۱۷ ، ۶۴ ، ۵۱۸۲-۵۱۹۱٫ [ Google Scholar ] [ CrossRef ]