۱٫ معرفی
مدل های رقومی ارتفاع (DEM) اطلاعاتی را در مورد ارتفاع سطح توپوگرافی با توجه به یک داده مرجع ارائه می دهند. بنابراین یک نمایش دیجیتالی از توپوگرافی را می توان با استفاده از این مدل ها تولید کرد [ ۱ ]. به عنوان یک اصطلاح عمومی، DEM برای هر دو مدل زمین دیجیتال (DTM) و مدل سطح دیجیتال (DSM) استفاده می شود. DTM به معنای ارتفاع از سطح برهنه توپوگرافی بدون ساختارهای دست ساز، پوشش گیاهی و سایر ویژگی های سطحی است، در حالی که DSM ارتفاعات همه این اشیاء پوشش زمین را شامل می شود [ ۲ ، ۳ ].]. بسته به این تعریف، حوزه های کاربردی DSM و DTM ممکن است متفاوت باشند. بر این اساس، در حالی که یک DSM برای مدلسازی منظر، مدلسازی شهر، شبیهسازی پرواز و کاربردهای مختلف تجسم مفیدتر است، یک DTM برای استخراج ویژگیهای مختلف ژئومورفولوژیکی، مدلسازی جریان آب، شبکههای زهکشی، میدان گرانشی و مدلسازی ژئوئید و غیره مورد نیاز است . ، ۳ ، ۴ ]. عوامل مختلفی از جمله تکنیک اکتساب داده ها، ویژگی زمین، شیب توپوگرافی، پوشش چشم انداز، استراتژی محاسباتی بر دقت DEM تولید شده تأثیر می گذارد. کیفیت یک DEM را می توان با توانایی اطلاعات ارتفاع تولید شده از DEM برای مطابقت با سطح خالی توپوگرافی اندازه گیری کرد [ ۵]. عدم قطعیت ها به طور طبیعی در تولید DEM به دلیل عوامل خطای مشاهده ای و محاسباتی ذکر شده رخ می دهد. این عدم قطعیت ها در نهایت بر کیفیت نتیجه و دقت تحلیل در کاربردهای DEM تأثیر می گذارد [ ۵ ]. بنابراین، انتخاب و به کارگیری یک مدل ارتفاع دیجیتال مناسب با توجه به دقت ارتفاع مورد نیاز در یک برنامه بسیار مهم است. روش های مختلفی را می توان برای ارزیابی کیفیت داده های DEM در یک منطقه مورد مطالعه قبل از کاربرد به کار برد.
دادههای طیف وسیعی از تکنیکهای اندازهگیری مانند بررسی زمینی، تصاویر فتوگرامتری هوابرد، اسکن لیزری هوابرد (LiDAR)، رادار دهانه مصنوعی تداخلسنجی (InSAR) امروزه معمولاً برای تولید DEM استفاده میشوند. در میان این تکنیکها، LiDAR هوابرد برای تولید یک DEM با کیفیت بالا با وضوح متراکم در یک منطقه مطالعه معمولی موثر و قابل اعتماد است. علاوه بر جنبههای مطلوب هوابرد-LiDAR در مقابل نقشهبرداری زمینی و فتوگرامتری در تولید DEM که این تکنیک را تقریباً یک عمل استاندارد در کاربردهای دادههای مکانی میکند، نکات خاصی در مورد پردازش دادههای خام LiDAR نیاز به توجه ویژه دارد و این تکنیک را سخت میکند [ ۶ ]]. اگرچه اندازهگیری هوایی LiDAR از یک پلتفرم سرنشیندار، به عنوان مثال، یک هواپیما امروزه تکنیکهای تولید DEM را در مناطق بزرگ هدایت میکند، اما برای کاربردهای کمهزینه در مناطق کوچکتر بسیار پرهزینه است. با این حال، در نتیجه پیشرفت در فناوریهای پهپاد، جایگزین مقرونبهصرفه این تکنیک برای نقشهبرداری توپوگرافی در مناطق کوچک، فتوگرامتری وسایل نقلیه هوایی بدون سرنشین (UAV) برای یک دهه استفاده میشود [ ۷ ]. مطالعات نشان داده اند که فتوگرامتری پهپاد یک جایگزین قابل اجرا با اثربخشی اندازه گیری و دقت کافی در تولید DEM است [ ۷ ، ۸ ].
اطلاعات ارتفاع و پارامترهای ژئومورفولوژیکی بهدستآمده از مدلهای رقومی ارتفاع با روشهای اسکن لیزری هوا و تکنیکهای فتوگرامتری در طیف گستردهای از کاربردها استفاده میشوند. این برنامهها شامل ایجاد نقشههای توپوگرافی/کارتوگرافی، تصحیح تصاویر هوایی، تجزیه و تحلیل شکل زمین، نقشهبرداری کاربری زمین، مطالعات هیدرولوژیکی و تحقیقات آب و هوایی و غیره است. در اکثریت قریب به اتفاق کاربردهای ذکر شده از مدل های ارتفاعی دیجیتال استفاده می شود. با این حال، در ژئودزی فیزیکی، DTMها برای محاسبه یا اعتبارسنجی سطح فیزیکی دیگر، که تحت اثر جاذبه تودههای توپوگرافی شکل میگیرد و ژئوئید نامیده میشود، استفاده میشوند [ ۹ ].
ژئوئید یک سطح هم پتانسیل میدان گرانشی زمین است که به میانگین سطح اقیانوس تقریب مییابد [ ۹ ]. در معنای عملی ژئوئید برای کاربردهای زمین شناسی و نقشه برداری، سطح آن به منزله مبدأ (سطح مرجع) برای ارتفاعات فیزیکی است. اچ) از نقاط روی توپوگرافی. در بسیاری از پروژه های مهندسی و نقشه برداری، ارتفاع فیزیکی مورد نیاز نقاط مربوط به ژئوئید معمولاً از طریق تبدیل GNSS (سیستم ناوبری ماهواره ای جهانی) ارتفاعات بیضی شکل به دست می آید. ساعتجیناساس) با ارتفاع ژئوئید ( نمترoدهل)- برگرفته از یک مدل ژئوئید محلی بر اساس یک رابطه اساسی اچ=ساعتجیناساس-نمترoدهل[ ۹ ]. روشها برای محاسبه مدل ژئوئیدی که به دست میآید متفاوت است نمترoدهلپارامتر مورد استفاده در این تبدیل [ ۱۰ ]. دو روش متداول در محاسبه مدل ژئوئیدی، رویکردهای گرانشی و هندسی (GNSS/Tسطسازی) هستند. رویکرد ثقلی مبتنی بر حل مسئله ارزش مرزی ژئودزیکی تعریف شده است و مشاهدات گرانشی زمینی را برای محاسبه مدل ژئوئیدی در مقیاس کشور تا مقیاس قاره به کار می گیرد. رویکرد هندسی به ندرت به عنوان یک راه حل نسبتاً عملی و سریع برای ارائه یک مدل تبدیل ارتفاع، به اصطلاح “مدل ژئوئید محلی”، در مناطق بسیار کوچک در غیاب مدل ژئویدی گرانشی با دقت بالا اعمال می شود [ ۱۱ ].]. در مرحله بعد، از نقاط کنترل گسسته با GNSS و داده های تراز، که به طور همگن بر روی توپوگرافی توزیع شده اند، استفاده می شود. معمولاً یک مدل ژئوئیدی محلی با الگوریتم درونیابی سطحی مناسب محاسبه می شود. در هر دو رویکرد، مدل ژئوئید یا در قالب یک معادله تحلیلی یا در مدل شطرنجی به عنوان گرههای شبکه نمونهبرداری منظم با دقت در سطح سانتیمتر به دست میآید. پس از محاسبه مدل ژئوئید، مجموعه دادههای مستقل، به عنوان مثال، دادههای GNSS/همسطح، انحرافات اخترژئودتیکی عمودی، به منظور ارزیابی دقت مدلهای ژئوئید محاسبهشده مورد نیاز است [ ۱۲ ].
هدف از این مطالعه بررسی عملکرد تکنیکهای فتوگرامتری اسکنر لیزری هوایی و پهپاد در تعیین و آزمایش مدلهای ژئویدی محلی به عنوان جایگزینی برای روشهای معمولی مدلسازی ژئوئیدی است. این آزمایش ها برای منطقه برگاما در منطقه ای به مساحت تقریباً ۱۵۶ کیلومتر مربع ، واقع در غرب ترکیه انجام شد. در اینجا، DTMهای منطقه، با اشاره به سطوح بیضی و ژئوئید، با استفاده از ابرهای نقطهای توسط تکنیکهای فتوگرامتری LiDAR هوایی و پهپاد [ ۷ ، ۱۳ ] تولید شدند. اندازه گیری های LiDAR هوایی توسط اداره کل نقشه برداری [ ۱۳ ] ارائه شد]. ارتفاع نقطه مجموعه داده در داده ITRF (قاب مرجع بین المللی زمینی) در سیستم ارتفاع بیضی شکل به دست آمد. اندازه گیری های فتوگرامتری پهپاد توسط اداره کل سیستم های اطلاعات جغرافیایی ترکیه انجام شد. در ارجاع جغرافیایی عکسهای هوایی پهپاد، نقاط کنترل زمینی دارای مختصات دوبعدی در ارتفاعات ارتومتریک ITRF و هلمرت در مبدأ عمودی منطقهای (داده شبکه کنترل عمودی ملی ترکیه-TUDKA99) استفاده شد. با توجه به این فرآیند، DTM تولید شده توسط فتوگرامتری پهپاد به مبدأ TUDKA99 اشاره کرد. بنابراین، داشتن دو نوع ارتفاع برای نقاط روی توپوگرافی، یعنی ارتفاعات بیضی شکل و ارتفاعات ارتومتریک از DTMها، امکان مدلسازی سطح زمین ژئوئید محلی را در نتیجه تفاوتهای DTMs فراهم میکند.
در ارزیابی های عددی، DTM ها از ابرهای نقطه فتوگرامتری LiDAR هوایی و پهپاد با استفاده از فیلتر متراکم پیشرونده با الگوریتم شبکه نامنظم مثلثی تطبیقی (ATIN) (با استفاده از نرم افزار Envi LiDAR) و فیلتر مورفولوژیکی (با استفاده از نرم افزار Global Mapper) به طور جداگانه تولید شدند. برای انتخاب بهترین الگوریتم برای به دست آوردن دقت DTM بالاتر. عملکرد الگوریتمهای فیلتر اعمالشده در تولید DTM با دقت مدلهای ژئوئیدی محلی که با استفاده از DTMهای تولید شده از هر الگوریتم فیلتر محاسبه شده بود، مقایسه و مورد بحث قرار گرفت. مدلهای سطح زمین ژئوییدی محلی، بهدستآمده از زوجهای DTM در نتیجه دو روش فیلتر، به دو شکل به عنوان دادههای شبکه و همچنین دادههای نقطهای در تقریباً ۲۵۰ نقطه کنترل انتخاب شده روی توپوگرافی تولید شدند. ن) از مدلهای ژئویدی محلی محاسبهشده با ارتفاعات ژئوئیدی بهدستآمده از ژئوئید منطقهای ترکیه ۲۰۰۳ (TG03) و یک مدل ژئوئید جهانی با وضوح بالا (EIGEN6C4) به ترتیب در گرههای شبکه و نقاط کنترل گسسته مقایسه شدند [ ۱۴ ، ۱۵ ]. ]. در نتیجه این مقایسهها، قابلیت استفاده از DTMها، تولید شده با تکنیکهای فتوگرامتری، برای استخراج و اعتبارسنجی مدلهای ژئوئیدی محلی به عنوان جایگزینی برای رویکرد GNSS/Levelling مورد بحث قرار گرفت.
در محتوای این مقاله، منطقه مورد مطالعه و دادههای ابر نقطه مورد استفاده و همچنین مدلهای ژئوئید منطقهای و جهانی که در مقایسهها استفاده میشوند، در بخش ۲ معرفی شدهاند . همان بخش شامل تعریف مختصری از روشهای کاربردی برای تشخیص و حذف اشتباهات، تولید DTM از دادههای ابر نقطه، مدلسازی سطح زمین ژئویدی محلی و مقایسه است. در بخش ۳ ، آمار دو مدل سطح زمین ژئوئیدی محلی که با استفاده از جفتهای DTM تولید شده با الگوریتمهای فیلتر آزمایش شده به دست آمدهاند و مورد بحث قرار میگیرند. نتایج مقایسه مدلهای سطح زمین ژئویدی محلی در قالبهای شبکهای و نقطهای، بهصورت جداگانه، با مدلهای ژئوئید منطقهای و جهانی نیز در بخش ۳ ارائه شده است.. این بخش با یک بخش بحث در مورد نقاط قوت و معایب تکنیک معرفی شده در تعیین و اعتبارسنجی مدل ژئویدی محلی از دیدگاه گسترده ای از کاربردها در پرتو نتایج به دست آمده بسته شده است. بخش ۴ نتیجه گیری و پیشنهادات برای مطالعات بیشتر را خلاصه می کند.
۲٫ مواد و روشها
۲٫۱٫ سایت تست
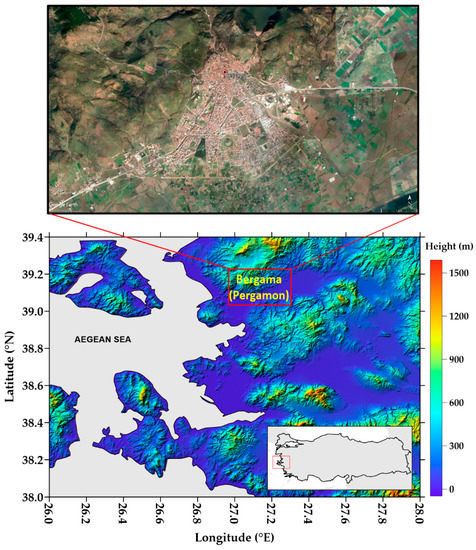
این مطالعه در سایت آزمایش برگاما انجام شد که مساحتی به وسعت ۱۵۶ کیلومتر مربع در غرب ترکیه را پوشش می دهد (نقشه در شکل ۱ را ببینید ). در منطقه، الگوی منظر ناهمگون است و شامل جنگلها، مناطق شهری و روستایی و منابع آب سطحی است. در کل منطقه، توپوگرافی نسبتاً تپه ای با شیب متوسط از محل به مکان است.
۲٫۲٫ داده های LiDAR هوابرد
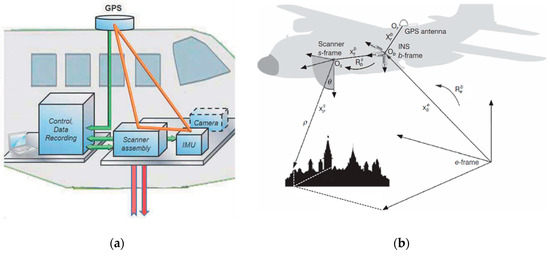
تکنیک LiDAR هوابرد یکی از کارآمدترین روشهای سنجش از دور مورد استفاده در نقشهبرداری زمین از دهه گذشته است، و دقتی تقریباً معادل تکنیکهای زمینی مرسوم در تولید DTM [ ۱۶ ] ارائه میکند. این تکنیک مبتنی بر اندازهگیری فاصله لیزری است که با دادههای GNSS/IMU (واحد اندازهگیری اینرسی IMU) از سکوی هواپیما ادغام شده است ( شکل ۲ را ببینید ) [ ۱۷ ]]. پس از یک فرآیند جمعآوری و پردازش تقریباً خودکار دادهها، مختصات سهبعدی (۳D) تمام نقاط اندازهگیری شده به دست میآید و سپس مدلهای زمین دیجیتال و/یا مدلهای سطح دیجیتال تولید میشوند. به طور خلاصه، پردازش دادههای اسکن لیزری هوا به طور معمول شامل چند مرحله با آمادهسازی، ارزیابی دادههای GNSS، کالیبراسیون سیستم، محاسبه مختصات تمام نقاط لیزر در یک سیستم مختصات ژئودتیک، فیلتر کردن و طبقهبندی نقاط لیزر است. بر این اساس، داده های GNSS ثبت شده در طول پرواز ابتدا بررسی می شوند و سپس مسیر پرواز با موقعیت یابی نسبی با استفاده از تفاوت های مضاعف مشاهدات سینماتیک محاسبه می شود. کالیبراسیون سیستم مبتنی بر ارزیابی اندازهگیریهای مربوطه در همپوشانی نوارها و نقاط کنترل انتخابی روی زمین است، به عنوان مثال، گوشه ای از پارکینگ ها یا سایر ساختارهای خاص که دارای پروفایل هایی هستند که با تکنیک های نقشه برداری زمینی یا GNSS اندازه گیری می شوند. پس از فرآیندهای کنترل و کالیبراسیون، مختصات سه بعدی لکه های لیزری منعکس شده که منطقه پرواز را پوشش می دهند محاسبه می شود. این مختصات سهبعدی محاسبهشده اولیه نقاط اسکن شده با لیزر، ابر نقطهای را تشکیل میدهند، شامل ارتفاعات پوشش گیاهی، اشیاء ساخته دست بشر و همچنین نقاط سطح توپوگرافی برهنه است.
بردار موقعیت، ایکسپه=(ایکسبه yبه zبه r پ y ρ θ)تی، از نقطه اسکن شده مشاهده شده پرا می توان اساساً به عنوان تابعی از مسیر GPS/INS (INS-Inertial Navigation System) تخمین زده شده بیان کرد ( شکل ۲ را ببینید )، با موقعیت GPS/INS پارامتر شده است. ایکسبه=(ایکسبه yبه zبه)تیو پارامترهای جهت ( r)، گام صدا ( پ) و یاو ( y)) (r پ y)تیبه ترتیب با داشتن محدوده مشاهده شده، ρو زاویه رمزگذاری، θ، از پرتو لیزر همانطور که در شکل ۲ نشان داده شده است. معادله مشاهده در قاب e (قاب زمین محور، زمین ثابت (ECEF) که توسط ITRF محقق شد) به شرح زیر است [ ۱۸ ]:
در معادله (تی)نماد یک کمیت است که بر اساس زمان تغییر می کند. در اینجا، پارامترهای موقعیت وابسته به مسیر ایکسبه(تی)و نگرش آربℓ، که با سه زاویه اویلر پارامتر می شود r(تی)، پ(تی)، y(تی)، دامنه ρ(تی)و زاویه رمزگذار θ(تی)به عنوان اندازه گیری در نظر گرفته می شوند. اهرم-بازو ایکسسبو دید خسته کننده آرسبثابت فرض می شوند که از فرآیند کالیبراسیون و چرخش به دست می آیند آرℓه(تی)به عنوان تابعی از موقعیت جغرافیایی با توجه به بیضی مرجع می آید و تبدیل از ژئودتیک محلی ( ℓ-قاب) به سیستم ژئودزی جهانی ( ه-قاب).
در نتیجه معادله (۱)، مختصات سه بعدی ابر نقطه لیزری نهایی در قاب e ممکن است برای تبدیل به یک داده ملی ( n- frame) مورد نیاز باشد. در نتیجه، ممکن است لازم باشد پیشبینی نقشهبرداری برای مختصات ژئودزیکی سهبعدی ( m -frame؛ قاب نقشهبرداری که در آن مختصات در یک سیستم مختصات شبکهای (یعنی شرق، شمال-) در دادههای ژئودزی مورد استفاده بیان میشوند) با توجه به نیاز کاربران ضروری باشد. . در کاربردهای خاص، ارتفاع ابر نقطه لیزری، که در سیستم ارتفاع بیضی تعریف شده است، باید به یک سیستم ارتفاع فیزیکی با اشاره به سطح ژئوئید تبدیل شود ( قاب v ). پس از تبدیل ارتفاع نقطه به داده عمودی ملی (از e/ n- frame به v -frame)، مختصات طرح ریزی با استفاده از یک طرح ریزی نقشه مناسب، به عنوان مثال، UTM، TM، تولید می شود ( m -frame). بسته به نرم افزار، تبدیل از e -frame به n- frame و v -frame ممکن است قابل اجرا نباشد. در چنین مواردی، تبدیل داده لازم مختصات ابر نقطه به صورت خارجی اعمال می شود. از سوی دیگر، اکثر این نرم افزارهای پردازش داده اسکنر لیزری گزینه خروجی مختصات طرح ریزی را با انتخاب طرح ریزی نقشه ارائه می دهند [ ۱۹ ].
شکل ۳ یک رابطه متوالی (تبدیل ها) را بین “قاب جهانی” و سایر فریم های میانی نشان می دهد که برای تولید مختصات ابر نقطه ای از داده های اسکن لیزری هوا بر اساس نیازهای کاربران مورد نیاز هستند [ ۱۸ ، ۱۹ ].
به عنوان یک فرمت استاندارد داده، داده های ابر نقطه ای بایگانی شده و در قالب “LAS” توزیع می شوند. بسته به هدف در نقشهبرداری، نقاط لیزری در یک ابر نقطهای به منظور تولید مدلهای زمین، سطح و/یا سایهبان دیجیتال طبقهبندی میشوند. در این فرآیند، از یک الگوریتم فیلتر مناسب استفاده می شود [ ۱۶ ].
در کیفیت مختصات سه بعدی داده های ابر نقطه، منابع خطای مختلف دخالت می کنند. عمدتاً نقص در حسگرها و مونتاژ آنها باعث خطاهای مشاهده ای و در نتیجه کاهش دقت مدل های تولید شده می شود [ ۱۸ ]. در میان کمیت های مشاهده شده، دقت برد لیزر-اسکنر ( ρدر شکل ۲ ب) عمدتاً به دقت اندازه گیری های زمان پرواز بستگی دارد. بر این اساس، دقت تعیین محدوده به طور متوسط ۲ سانتی متر گزارش شده است [ ۲۱ ]. دقت موقعیت یابی GNSS که به دقت گیرنده های GNSS و همچنین استراتژی های پردازش GNSS بستگی دارد و دقت سنسورهای IMU استفاده شده، نقش مهمی در دقت مختصات سه بعدی نقاط اسکن لیزری ایفا می کند. دقت مختصات ایستگاه های GNSS مرجع روی زمین که در موقعیت یابی نسبی استفاده می شود، فاصله این نقاط تا منطقه مورد مطالعه و همچنین ارتفاع پرواز بر دقت موقعیت سه بعدی ابر نقطه مشتق شده تأثیر می گذارد. اطلاعات بیشتر در مورد بودجه خطا و ارزیابی دقت تولید DEM با تکنیک اسکن لیزری هوابرد را می توان در [۱۸ ] و [ ۲۱ ]. پس از محاسبه مختصات سه بعدی نقاط لیزری به عنوان مجموعه داده ابر نقطه ای، کیفیت محصولات ثانویه، یعنی DSM، DTM، DCM (مدل های سایه بان دیجیتال) نیز تحت تأثیر عملکرد الگوریتم فیلتر اعمال شده قرار می گیرد. هرچه قابلیت اطمینان در حذف و طبقه بندی پرت در فرآیند فیلترینگ بیشتر باشد، کیفیت محصولات تولید شده بالاتر خواهد بود. Süleymanoğlu و Soycan [ ۲۲ ] با مطالعه موردی در قلمرو Bergama، ارزیابی الگوریتمهای فیلترینگ مختلف مورد استفاده برای تولید DTM را از ابر نقطهای LiDAR در هوا ارائه میکنند. Süleymanoğlu و Soycan [ ۲۲] شش الگوریتم فیلتر رایج را مورد آزمایش قرار داد و آنها را در چهار منطقه آزمایشی با الگوهای منظر و توپوگرافی متفاوت مقایسه کرد. در نتیجه، الگوریتم برازش چند جملهای تکراری (IPF) برای مناطقی که دارای چشمانداز صاف، شهرنشینی تا حد معینی و الگوهای کشاورزی هستند، پیشنهاد شد. با این حال، به جای IPF، آستانه ارزیابی با الگوریتم فیلتر پنجره گسترش (ETEW) به عنوان بهترین روش فیلتر در مناطق شیب دار با پوشش گیاهی متراکم و زیرساخت گزارش شد [ ۲۲ ].
در ادبیات، می توان مطالعات زیادی را در مورد ارزیابی دقت DTM بسته به عوامل مختلفی از جمله رویکرد پردازش داده های GNSS، دقت موقعیت و تعداد ایستگاه های مرجع، الگوریتم فیلتر برای تشخیص اشتباه داده های ابر نقطه، الگوریتم های درون یابی و طبقه بندی پیدا کرد. تولید DTM و غیره [ ۲۳ ، ۲۴ ، ۲۵ ]. اگرچه بسته به شرایط مربوط به آزمایش اسکن لیزر هوایی تغییر می کند، دقت عمودی سیستم های اسکن لیزری هوابرد در مناطق باز به صورت تقریبی ۰٫۱۵ متر ریشه به معنای مربع خطا (RMSE) گزارش شده است [ ۲۵ ، ۲۶ ].]. با این حال، با برنامهریزی مناسب اندازهگیریها، با استفاده از تجهیزات اندازهگیری دقیق و استراتژیهای دقیق پردازش داده، میتوان دقت DTMهای بهدستآمده از تکنیکهای LiDAR را بیشتر بهبود بخشید [ ۲۷ ].
در این مطالعه، دادههای LiDAR هوابرد با استفاده از Optech Pegasus HA-500 نصب شده بر روی هواپیمای Beechcraft B200 در یک پرواز آزمایشی جمعآوری شد. اندازه گیری ها توسط اداره کل نقشه برداری سازماندهی و انجام شد [ ۱۳ ]. پارامترهای سنسور لیزر و اطلاعات فنی پرواز در جدول ۱ خلاصه شده است. اندازهگیریهای اسکن لیزری هوابرد بین ۲۳ اکتبر تا ۶ نوامبر ۲۰۱۴ انجام و تکمیل شد. طرح پرواز با استفاده از نرمافزار برنامهریز پرواز FMS planner 4.7.3 [ ۱۳ ] تهیه شد. ارتفاع پرواز ۱۲۰۰ متر برنامه ریزی شده بود، میانگین تراکم نقطه حداقل ۸ نقطه در متر مربع بود .و پرواز شامل ۳۲ نوار با همپوشانی ۲۵٪ بود. عرض اسکن ۳۵ درجه و فاصله خطوط اسکن ۵۸۰ متر بود.
داده های ثبت شده GNSS/IMU در طول پرواز توسط اداره کل نقشه برداری با استفاده از نرم افزار POSPac MMS (Position and Orientation System Postprocessing Package (POSPac) Mobile Mapping Suite (MMS)) پردازش شد [ ۲۸ ]. دادههای جمعآوریشده GNSS/IMU با ارجاع به دو ایستگاه شبکه CORS-TR (ایستگاههای مرجع دائماً فعال-ترکیه)، AYVL (Ayvalık، عرض جغرافیایی ۳۹°۱۸’۴۱٫۰۴″ شمالی و طول جغرافیایی ۲۶°۴۱’۰۹٫۹۶ اینچ شرقی) پردازش و تنظیم شدند. و KIKA (Kırkağaç، عرض جغرافیایی ۳۹°۰۶′۲۱٫۲۴″ شمالی و طول جغرافیایی ۲۷°۴۰′۱۹٫۹۲″E) که به ترتیب در فواصل ۶۵ کیلومتری و ۴۵ کیلومتری از محل آزمایش قرار دارند. در طی فرآیندهای پسا، دادههای RINEX (فرمت تبادل مستقل گیرنده) ایستگاههای CORS-TR در بازه نمونهگیری ۱ ثانیهای مورد استفاده قرار گرفت [ ۱۳ ]]. اداره کل نقشه برداری داده های اسکن لیزری هوابرد را با استفاده از نرم افزار LMS (LIDAR Mapping Suite) توسط OPTECH، شرکت تولید کننده حسگر اسکن لیزری مورد استفاده، پیش پردازش کرد. در آزمایش دادههای ابر نقطه تولید شده، از ۵۱ نقطه زمین که بهعنوان ۲۶ نقطه کنترل و ۲۵ نقطه آزمایش از هم جدا شدند، استفاده شد. در نتیجه آزمایشهای اولیه که با استفاده از نقاط کنترل در منطقه انجام شد، دقت عمودی بهدستآمده با استفاده از RMSE 07/0± متر گزارش شد [ ۱۳ ]. دادههای نقطهای طبقهبندینشده بهدستآمده توسط اداره کل نقشهبرداری با مختصات پیشبینی مرکاتور عرضی جهانی (UTM) (منطقه شبکه ۳۵S) و ارتفاعات بیضی ( ساعت) در داده ITRF.
۲٫۳٫ داده های فتوگرامتری پهپاد
در این مطالعه، DTM دوم تولید شده از داده های ابر نقطه ای اداره کل سیستم های اطلاعات جغرافیایی به کار گرفته شد. به عنوان متفاوت از مجموعه داده اول، داده های ابر نقطه دوم با عکس های هوایی از وسیله نقلیه هوایی بدون سرنشین با استفاده از ارجاع جغرافیایی غیرمستقیم به دست آمد. مختصات افقی نقاط کنترل زمینی، که برای ژئو ارجاع غیرمستقیم ابر نقطه استفاده میشوند، با اندازهگیریهای GNSS در مبدأ ITRF بهدست آمدند. ارتفاعات ارتومتریک نقاط کنترل زمین از طریق اندازه گیری تسطیح در داده TUDKA99 به دست آمد. با توجه به نقاط کنترل زمینی و ارجاع جغرافیایی غیرمستقیم عکسهای هوایی، دادههای ابر نقطه در سیستم ارتفاع فیزیکی با اشاره به ژئوئید ( قاب v) تولید شد.). داشتن ارتفاعهای ارتومتریک نقاط ابر نقطهای و در نتیجه ایجاد یک DTM دوم در داده عمودی منطقهای برای محاسبه ارتفاعات ژئوئید به عنوان تفاوت بین دو DTM بسیار مهم بود.
فتوگرامتری هوایی یک رویکرد مرسوم است که به طور گسترده برای نقشه برداری سه بعدی و دو بعدی از قسمت های خشکی با ارزیابی عکس های گرفته شده از یک وسیله نقلیه هوایی استفاده می شود. مشابه تکنیک LiDAR هوایی، روش فتوگرامتری نیز معمولاً برای تولید DTM در بسیاری از کاربردها استفاده میشود. ظهور هواپیماهای بدون سرنشین سبک وزن مجهز به دستگاههای GNSS-IMU و شروع استفاده از آنها در فتوگرامتری هوایی، استفاده از این تکنیک را بهویژه در پروژهها و برنامههای کم هزینه به طور قابل توجهی افزایش داده است. تئوری اساسی تولید نقشه فتوگرامتری مبتنی بر یک تصویر واحد و جهت گیری جفت تصویر استریو است. اگرچه طرح اساسی این نظریه ثابت مانده است،۳۰ ، ۳۱ ، ۳۲ ]. در روش مدرنسازی، الگوریتم «ساختار از حرکت» (SfM) ساختار سهبعدی را با استفاده از یک سری تصاویر همپوشانی و افست مانند فتوگرامتری استریوسکوپی حل میکند. اگرچه این الگوریتم در اصل از اصول اولیه یکسانی پیروی می کند، اما با استفاده از استراتژی حل تفاوت های اساسی با فتوگرامتری معمولی دارد. در SfM، مکانهای دوربین، هندسه صحنه، پارامترهای جهتگیری به طور خودکار بدون نیاز به شبکهای از نقاط کنترل زمینی با مختصات سه بعدی شناخته شده حل میشوند. در عوض، پارامترهای فهرست شده به طور همزمان با استفاده از تنظیم تکراری بسته نرم افزاری با افزونگی بالا بر اساس مجموعه ای از نقاط برجسته، که به طور خودکار از تصاویر متعدد با هم همپوشانی استخراج می شوند، حل می شوند.۳۲ ، ۳۳ ]. توسعه الگوریتم SfM به دهه ۱۹۹۰ برمی گردد و بر اساس فناوری بینایی کامپیوتر و الگوریتم های تطبیق خودکار ویژگی ها [ ۳۲ ] است. از طریق تعدادی از نرم افزارهای پردازش ابری که از الگوریتم SfM برای تولید داده های نقطه-ابر برای اهداف مختلف استفاده می کنند، رایج شده است [ ۳۲ ، ۳۴ ]. مزایای ارائه شده توسط الگوریتم SfM منجر به بهبود کیفیت محصولات زمین به دست آمده از فتوگرامتری هوایی با پهپادها شد [ ۳۵ ].
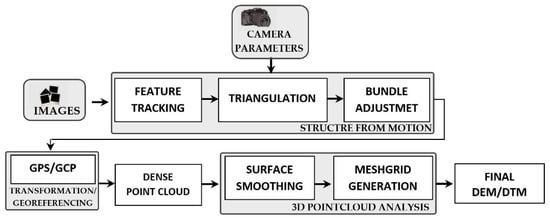
شکل ۴ روابط بین نقطه شی ( A )، قاب تصویر ( i )، قاب پهپاد ( u ) و سیستم مختصات ژئودتیک نشان داده شده به عنوان قاب جهانی ( g ) را توصیف می کند. بر اساس هندسه رصدی توصیف شده، شبکههای DEM با پایههای تصویربرداری پهپاد بر روی تعدادی از مراحل عملیاتی که شامل همکاری حسگرهای مختلف از جمله قطبنما مغناطیسی، فشارسنج، دوربین CMOS، GNSS با فرکانس دوگانه، IMU با ژیروسکوپ و شتابسنج است. شکل ۵گردش کار فرآیند تولید نقطه-ابر پراکنده جغرافیایی مرجع و در نهایت DEM از طریق روش فتوگرامتری را نشان می دهد. بر این اساس، پس از برنامهریزی و انجام مراحل کار میدانی، یک مدل سهبعدی پراکنده از مثلثبندی تناظر بین تصاویر متعدد در صحنه با استفاده از الگوریتم SfM بهدست میآید. سپس موقعیتهای سهبعدی نقاط که با ردیابی ویژگی تطبیق داده شدهاند، با کمک georeferencing بازیابی میشوند. در بخش پایانی، یک روش مبتنی بر بهینهسازی برای محاسبه و مثلثبندی دادههای شبکهای متراکم استفاده میشود. نقطه-ابر سه بعدی حاصل برای حذف نقاط مبهم فیلتر می شود و در نهایت، داده های نقطه-ابر متراکم درون یابی می شوند تا یک مدل سطح به شکل مش-شبکه به دست آید.
دو رویکرد اصلی برای ارجاع جغرافیایی داده های تصویر وجود دارد [ ۳۶ ]. یکی از آنها رویکرد غیر مستقیم در کاربردهای فتوگرامتری هوایی با استفاده از پهپاد است. در این روش، داده های تصویر به صورت غیرمستقیم با استفاده از نقاط کنترل زمینی (GCP) دارای مختصات شناخته شده ای که روی تصاویر قابل مشاهده است، ارجاع داده می شوند. برای ژئوارفرانس غیرمستقیم، وسیله نقلیه هوایی لزوماً مجهز به ابزار موقعیت و جهت گیری نیست و این به عنوان یک مزیت در نظر گرفته می شود. بر این اساس، ژئوارفرانس غیرمستقیم، بسته به دقت و داده مرجع مختصات نقاط کنترل زمینی مورد استفاده، نتایج موقعیتیابی دقیقی را در دادههای ژئودزی مورد نیاز فراهم میکند. فرآیند ارجاع جغرافیایی غیرمستقیم در رابطه (۲) فرموله شده است.
جایی که roآgبردار مختصات زمین نقطه شی ( A ) را در سیستم مختصات ژئودتیکی ( g -frame) نشان می دهد. roمنg(تی)بردار مختصات سنسورهای دوربین در آن زمان است ( تی) که در g-قاب، آرمنg(تی)ماتریس چرخش i- frame به g -frame است، سآعامل مقیاس است، rمنآمن(تی)بردار مختصات شی را نشان می دهد من-قاب ( شکل ۴ را ببینید ).
از سوی دیگر، رویکرد دوم، ارجاع جغرافیایی مستقیم است. این رویکرد از حسگرهای داخلی برای ارجاع جغرافیایی تصویر استفاده می کند. در این روش، جهت گیری بیرونی معمولاً با استفاده از یک مجموعه GNSS و یک واحد INS نصب شده بر روی بدنه هواپیما اندازه گیری می شود. این روش مستلزم همگام سازی دقیق سنسورها و کالیبراسیون عدم تراز است.
ژئو ارجاع مستقیم برای به دست آوردن مختصات زمین نقطه شی ( A ) در سیستم مختصات ژئودتیکی ( g -frame)، بر معادله (۳) تکیه دارد. استفاده از این معادله در رویکرد مستقیم مستلزم دانش پیشینی تعدادی از پارامترهای سیستماتیک است. سآ ، rتومن تو) در معادله [ ۳۷ ] بیان شده است.
جایی که roتوg(تی)بردار مختصات حسگرهای GNSS-IMU در آن زمان است ( تی) قرار گرفتن در معرض، آرتوg(تی)ماتریس چرخش u -frame به g -frame است، آرمنتو(تی)ماتریس چرخش از i- frame به u -frame است، rمنآمن(تی)بردار مختصات شی در است من-قاب، rتومن توبردار موقعیت مرکز نمایش دوربین در قاب u است ( شکل ۴ را ببینید ). این rتومن تو اهرم-بازو و آرمنتوپارامترهای boresight در تو-قاب ثابت هستند.
در هر مرحله از فرآیند تولید ابر نقطه سه بعدی در فتوگرامتری پهپاد، عوامل مختلفی از جمله داده های ورودی، کیفیت تصویر، دقت موقعیت GNSS، پارامترهای پردازش به کار گرفته شده بر دقت DEM نهایی تأثیر می گذارد. با در نظر گرفتن نتایج تجربی در ارزیابی دقت DEM های تولید شده توسط تصاویر فتوگرامتری پهپاد، مشاهده می شود که دقت عمودی ~ ۵-۶ سانتی متر در RMSE را می توان در مناطق خالی با توپوگرافی متوسط به دست آورد [ ۳۹ ].
با پیروی از روش توصیف شده و روش ارجاع جغرافیایی غیرمستقیم، مختصات سه بعدی ابر نقطه با استفاده از فتوگرامتری پهپاد توسط اداره کل سیستم های اطلاعات جغرافیایی ترکیه استخراج شد. دقت عمودی دادههای ابر نقطهای ~ ۵-۶ سانتیمتر توسط مؤسسه ارائهدهنده داده گزارش شد. مجموعه داده با مختصات پروژکشن جهانی مرکور عرضی (UTM) آنها (منطقه شبکه ۳۵S) در مبنا ITRF و ارتفاعات ارتومتریک ارائه شد. اچ) در شبکه کنترل عمودی ملی ترکیه (TUDKA99). چگالی ابر نقطه ارائه شده ۴۵۰ نقطه در متر مربع بود .
۲٫۴٫ تولید DTM از دادههای Point Cloud برای مدلسازی سطح زمین ژئویدی محلی
در آزمایشها، سطح زمین ژئویدی محلی از تفاوتهای بین دو DTM که با دادههای ابر نقطهای توسط اسکن لیزری هوایی تولید شدهاند، به دست آمد. (Dتیممن)( بخش ۲٫۲ ) و تصاویر فتوگرامتری پهپاد ( Dتیممنمن) ( بخش ۲٫۳ ) به ترتیب. ارتفاع نقطه، به دست آمده از Dتیممنارتفاعات بیضی شکل هندسی معنی دار هستند ( ساعت) در مبدأ ITRF و به بیضی مرجع GRS80 مراجعه کنید، در حالی که به Dتیممنمنارتفاعات ارتومتریک معنادار فیزیکی را برای ما فراهم کرد ( اچ) در داده ارتفاع منطقه ای TUDKA99. از این رو ارتفاعات ژئوئید محلی ( ن) از تفاوت های ایجاد شده اند ساعتو اچمانند ن=ساعت-اچبر حسب متر ( شکل ۶ را برای تعریف ارتفاع ژئوئید ببینیدندر نقطه توپوگرافی).
با پیروی از روش شرح داده شده، بر اساس تفاوت های Dتیممنو Dتیممنمنمدلهای ژئوئیدی محلی در قالبهای شبکهای و نقطهای تولید شدند. آزمایشهای عددی با استفاده از مدلهای شبکهای با هدف ارزیابی عملکرد مدلهای تولید شده در کل منطقه که شامل انواع مختلف پوشش زمین است، انجام شد. از سوی دیگر، مدلهای ژئوئید محلی نقطهای در نقاط انتخاب شده دستی در توپوگرافی خالی محاسبه شدند. بنابراین، انتظار میرود که آزمایشهای عددی با مدلهای ژئوئیدی محلی در قالب نقطهای نتایج واقعیتر و قابل اعتمادتری را در مورد عملکرد روش مدلسازی ژئوئید پیشنهادی ارائه دهند. توزیع نقاط کنترل ۲۵۰ ژئوییدی به صورت دستی در منطقه مورد مطالعه در شکل ۷ نشان داده شده است.. همانطور که در زیر به تفصیل توضیح داده خواهد شد، آزمایشهای عددی انجام شده با مدلهای ژئوئیدی محلی در قالب شبکهای نیز نتایج ارزیابی دو روش طبقهبندی مختلف مورد استفاده در تولید DTM را نشان میدهد. بر این اساس، دو جفت DTM تولید شده با استفاده از هر دو الگوریتم تراکم پیشرونده و فیلتر مورفولوژیک، به ترتیب، در استخراج دو مدل ژئوئید محلی شبکهای استفاده شدند. ارتفاعات زمینی بهدستآمده از هر زوج DTM از طریق آمار پایه آنها در ادامه بررسی شد. هر دو الگوریتم فیلتر همانطور که در ادامه به تئوری های آنها اشاره می شود با نرم افزار مجزایی پیاده سازی شدند.
پس از به دست آوردن داده های ابر نقطه ای از موسسات ارائه دهنده داده، در مرحله اول فرآیندها، داده ها فیلتر شده و DTM ها بر این اساس تولید شدند. ابر نقطه اصلی توسط اندازه گیری های هوایی LiDAR در کاشی های تقسیم شده به ما داده شد. با این حال، ابر نقطه دوم بهدستآمده از تصاویر فتوگرامتری پهپاد، کل منطقه را پوشش میدهد و بهعنوان یک مجموعه داده واحد برای کل منطقه ارائه میشود. از آنجایی که منطقه مورد مطالعه نسبتاً بزرگ است و بنابراین پردازش ابرهای نقطه متراکم به طور کلی نیاز به پردازندههای کامپیوتری با ظرفیت بالا و زمان پردازش طولانی دارد، ما دادههای ابر نقطه پهپاد را در ابتدا برای فرآیند فیلتر کردن به زیرمنطقههای ۱ کیلومتر × ۱ کیلومتر تقسیم کردیم. پس از آن، DTM های تکه ای تولید شده به عنوان کاشی های جداگانه به منظور تشکیل DTM کل منطقه به هم متصل شدند. فاصله ها، که در مرزهای کاشی بودند، از داده های DTM در برگه های نقشه همسایه درون یابی شدند. با این حال، از آنجایی که تشخیص داده شد که فرآیند درون یابی برای ارائه انتقال صاف و بدون درز در امتداد مرزهای کاشی DTMs ناموفق بود، استراتژی محاسباتی تغییر کرد و DTM ها با استفاده از داده های ابر نقطه به عنوان یک کل، پس از حذف اشتباه و حذف نویز تولید شدند. داده های ابر نقطه پارتیشن بندی شده همانطور که در بالا ذکر شد، تولید DTM ها با استفاده از دو رویکرد فیلترینگ مختلف در طبقه بندی انجام شد. در مراحل مختلف پردازش داده های ابری نقطه ای و سپس تولید DTM: CloudCompare، Envi LiDAR، Global Mapper GIS استفاده شد. از آنجایی که تشخیص داده شد که فرآیند درون یابی برای ارائه انتقال صاف و بدون درز در امتداد مرزهای کاشی DTMs ناموفق بود، استراتژی محاسباتی تغییر کرد و DTM ها با استفاده از داده های ابر نقطه به عنوان یک کل، پس از حذف اشتباه و حذف نویز پارتیشن بندی شده، تولید شدند. داده های ابری نقطه ای همانطور که در بالا ذکر شد، تولید DTM ها با استفاده از دو رویکرد فیلترینگ مختلف در طبقه بندی انجام شد. در مراحل مختلف پردازش داده های ابری نقطه ای و سپس تولید DTM: CloudCompare، Envi LiDAR، Global Mapper GIS استفاده شد. از آنجایی که تشخیص داده شد که فرآیند درون یابی برای ارائه انتقال صاف و بدون درز در امتداد مرزهای کاشی DTMs ناموفق بود، استراتژی محاسباتی تغییر کرد و DTM ها با استفاده از داده های ابر نقطه به عنوان یک کل، پس از حذف اشتباه و حذف نویز پارتیشن بندی شده، تولید شدند. داده های ابری نقطه ای همانطور که در بالا ذکر شد، تولید DTM ها با استفاده از دو رویکرد فیلترینگ مختلف در طبقه بندی انجام شد. در مراحل مختلف پردازش داده های ابری نقطه ای و سپس تولید DTM: CloudCompare، Envi LiDAR، Global Mapper GIS استفاده شد. همانطور که در بالا ذکر شد، تولید DTM ها با استفاده از دو رویکرد فیلترینگ مختلف در طبقه بندی انجام شد. در مراحل مختلف پردازش داده های ابری نقطه ای و سپس تولید DTM: CloudCompare، Envi LiDAR، Global Mapper GIS استفاده شد. همانطور که در بالا ذکر شد، تولید DTM ها با استفاده از دو رویکرد فیلترینگ مختلف در طبقه بندی انجام شد. در مراحل مختلف پردازش داده های ابری نقطه ای و سپس تولید DTM: CloudCompare، Envi LiDAR، Global Mapper GIS استفاده شد.۴۰ ، ۴۱ ، ۴۲ ]. در محاسبه مدلهای ژئوئیدی محلی در قالبهای شبکهای و نقطهای با تفریق ارتفاعات ارتومتریک Dتیممنمناز ارتفاعات بیضی شکل از Dتیممن، نرم افزار Surfer توسط شرکت Golden Software به کار گرفته شد [ ۴۳ ]. ما ۲۵۰ نقطه کنترل ژئوئید را بر روی توپوگرافی خالی با توزیع همگن در سطح منطقه برای تولید نسخه نقطهای مدل ژئوئید محلی انتخاب کردیم. هنگام تعیین مکان این مجموعه نقاط پراکنده، ما توجه ویژه ای به گنجاندن نقاط مشخصه توپوگرافی کردیم که می توان فرض کرد که بدون تغییر باقی می مانند و بنابراین در طول کمپین فتوگرامتری هوایی LiDAR و UAV اندازه گیری می شوند ( شکل ۷ ). به این ترتیب، هدف ما استفاده از نقاط توپوگرافی، که در هر دو مجموعه داده مشترک است و از این رو برای حذف اثر تغییرات محیطی احتمالی در یک فاصله زمانی کوتاه بین پروازهای هوابرد و پهپاد در نتایج است.
در مرحله فیلتر کردن ابرهای نقطه، نویز و اشتباهات موجود در ابرهای نقطه با استفاده از الگوریتم فیلتر آماری حذف پرت (SOR) در نرم افزار CloudCompare [ ۴۴ ] پاکسازی شدند. فیلتر SOR دارای یک الگوریتم محاسباتی نسبتاً ساده است که بر اساس تجزیه و تحلیل تصادفی تمام نقاط در ابر نقطه است و نقاطی را که آستانه تعیین شده به عنوان معیار را برآورده نمی کنند، از ابر نقطه حذف می کند [ ۴۵ ].]. در فیلتر کردن، برای هر نقطه در ابر نقطه، فاصله مکانی تا تعدادی از نقاط همسایه محاسبه می شود. میانگین فاصله های محاسبه شده در نظر گرفته شده است. توزیع تفاوت بین فواصل محاسبه شده از میانگین آنها به صورت گاوسی در نظر گرفته شده است. سپس هر نقطه ای که اختلاف فاصله داشته باشد و با توزیع مناسب نباشد به عنوان یک اشتباه حذف می شود. بنابراین، فاصله بین یک زوج-نقطه بر اساس تعداد نقاط تعیین شده برای تعیین مرزهای همسایگی تشکیل می شود (بگذارید بگوییم کنقاط اطراف نقطه مورد نظر) نمی تواند تجاوز کند دمترآایکس.در متر که:
جایی که μفاصله متوسط است، n= 1،۲،۳ یک ثابت ضریب است که بسته به فاصله اطمینان مورد نیاز انتخاب می شود. σانحراف معیار فواصل است. از این رو، نقاطی که دورتر از دمترآایکس.حذف می شوند. در این فرآیند، تعریف از ک، تعداد نقاط محله و nضریب انحراف استاندارد، پارامترهای مهمی هستند که تعداد نقاط حذف شده از مجموعه داده را تعیین می کنند. از این رو، موفقیت فرآیند فیلترینگ. در مطالعه، در نتیجه رویکرد مبتنی بر آزمون و خطا، به عنوان تعیین و استفاده شدیم ک= ۶ و n= 1، با توجه به رسیدن به دقت مورد نیاز از DTM های تولید شده مطابق با هدف ما. پس از حذف اشتباهات با اعمال فیلتر حذف پرت آماری مبتنی بر فاصله، ما یک الگوریتم فیلتر مانند SOR را برای حذف نویز بیشتر از داده های ابر نقطه به منظور به دست آوردن داده های DTM با دقت بالاتر در نتیجه اجرا کردیم [ ۴۶ ]. فرمولبندی الگوریتم حذف نویز، که پس از فیلتر تشخیص پرت مبتنی بر فاصله اعمال شد، مشابه فیلتر SOR است. فیلتر حذف نویز متفاوت از مرحله اول، به جای فاصله، اختلاف ارتفاع بین نقاط را در نظر می گیرد و نقاطی را که اختلاف ارتفاع بیش از مقدار آستانه دارند حذف می کند. ساعتمترآایکس.=μ+n.σ، جایی که μمقدار میانگین اختلاف قد است، nثابت ضرب است، σانحراف استاندارد اختلاف ارتفاع از مقدار متوسط آنها است). در اعمال فیلتر حذف نویز، تعداد نقاط همسایگی ۶ و ثابت ضریب نیز ۱ انتخاب شد.
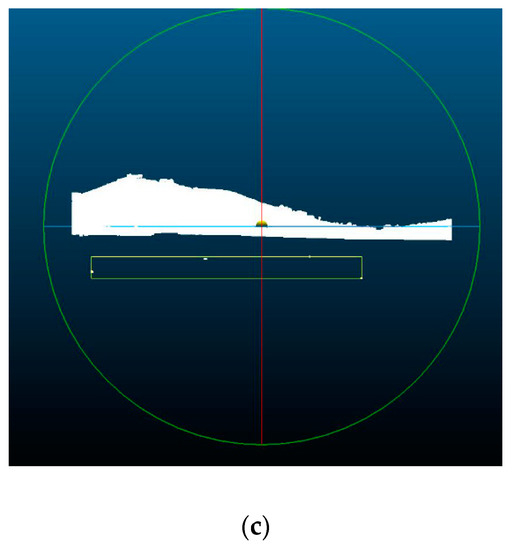
پس از حذف اشتباهات و حذف نویز داده ها، تعداد نقاط در ابر نقطه کاهش یافت. به عنوان مثال، در ابر نقطه مشتق شده از تصاویر فتوگرامتری پهپاد، در حالی که تعداد نقاط در مجموعه داده اصلی ۲۳،۱۷۵،۳۲۹ بود، پس از فیلتر به ۱۸،۲۳۱،۰۹۲ کاهش یافت. بنابراین ۲۱ درصد از تمام نقاط با فیلتر حذف شدند. پس از فیلترینگ مبتنی بر تصادفی که به صورت خودکار با استفاده از فیلترهای SOR و حذف نویز در ماژولهای نرمافزار CloudCompare انجام شد، نقاط باقیمانده در هر دو مجموعه دادههای ابر نقطهای نیز بهصورت بصری شناسایی شدند و چند نقطه دیگر که مشکوک به پرت بودن آنها بودند، شناسایی شدند. با استفاده از همین نرم افزار به صورت دستی حذف شد. ابر نقطه از نظر بخش عمودی قبل از (الف) و بعد از (ب) فرآیندهای تمیز کردن خودکار و دستی (ج) در زیر نشان داده شده است.شکل ۸ [ ۴۶ ]. این تجسم ایده ای از موفقیت فیلترهای اعمال شده و نیاز به مداخله دستی پس از تمیز کردن خودکار داده ها می دهد.
به دنبال فرآیندهای فیلتر و حذف نویز ابرهای نقطه ای، DTMها از ابرهای نقطه فتوگرامتری LiDAR هوایی و پهپاد به طور جداگانه در قالب شطرنجی (*.geotiff) تولید شدند. در این مرحله، فرآیند تولید DTM از طریق الگوریتمهای فیلتر مختلف انجام شد و نتایج بهدستآمده به منظور روشن شدن تفاوت بین الگوریتمهای اعمالشده با استفاده از ارتفاعهای ژئوئید محاسبهشده مورد ارزیابی قرار گرفت [ ۴۰ ، ۴۷ ]. همانطور که در بالا ذکر شد، در تولید تکه ای DTM ها، مصنوعات در امتداد مرزهای کاشی روی الگوی DTM رخ داده اند ( شکل ۹ را ببینید.). به دلیل این مصنوعات، در آزمایش دوم، مجموعه دادههای ابر نقطهای پس از فیلتر کردن و فرآیندهای حذف نویز ترکیب شدند و سپس DTMها با استفاده از ابرهای نقطهای به عنوان یک کل در منطقه مورد مطالعه تولید شدند. به منظور بهینه سازی زمان محاسباتی و استفاده از پردازنده کامپیوتر، چگالی نقطه ابرهای نقطه تا حدی کاهش یافت [ ۴۶ ].
در طبقه بندی برای تولید DTM، ابتدا فیلتر تراکم پیشرونده با الگوریتم شبکه نامنظم مثلثی تطبیقی (ATIN) با استفاده از نرم افزار Envi LiDAR [ ۲۲ ] اعمال شد. به دنبال تولید DTMها از ابرهای نقطه فتوگرامتری هوایی LiDAR و UAV با استفاده از نرم افزار Envi LiDAR، همان تولید با فیلتر مورفولوژیکی با استفاده از نرم افزار Global Mapper [ ۲۲ ، ۴۰ ] تکرار شد.
اساساً در فیلتر تراکم پیشرونده با الگوریتم ATIN، منطقه مورد مطالعه به زیرمناطق تقسیم شده و حداقل ارتفاع به صورت محلی تعیین می شود. نقاط با حداقل ارتفاع به عنوان نقاط سطح زمین (سطح توپوگرافی برهنه) در نظر گرفته می شود. سپس شبکه نامنظم مثلثی (TIN) با استفاده از روش مثلث سازی Delaunay تولید می شود. با در نظر گرفتن فاصله یک نقطه (اما به جز نقطه بذر) در یک سلول Delaunay تا سطح TIN ( Δساعت) و وسیع ترین زاویه از سه زاویه ( αمن) با سطح TIN ( شکل ۱۰ را ببینید )، تصمیم گرفته می شود که نقطه را نگه دارید یا حذف کنید ( پج). برای اتخاذ این تصمیم، فاصله و زاویه در نقطه مورد نظر با مقادیر آستانه از پیش تعریف شده مقایسه می شود. اگر مقادیر مقایسه شده کوچکتر از مقادیر آستانه باشند، نقطه به عنوان نقطه زمین در نظر گرفته می شود. این الگوریتم فیلترینگ یک فرآیند تکراری است و هر بار که یک نقطه از مجموعه داده نقاط زمین حذف میشود، TIN دوباره تولید میشود و این فرآیند تا زمانی ادامه مییابد که همه نقاط به عنوان جزئیات زمین یا شی طبقهبندی شوند [ ۴۸ ].
علاوه بر تراکم پیشرونده، فیلتر مورفولوژیکی که ما در تولید DTM با نرم افزار Global Mapper اعمال کردیم، در چهار دسته الگوریتم فیلتر که در [ ۴۸ ] ارائه شده است نیز ذکر شده است. الگوریتم فیلتر مورفولوژیکی مبتنی بر اصول مورفولوژی ریاضی است و عمدتاً از دو عملیات فرسایش ( ⊖ ) و اتساع ( ⊕ ) استفاده میکند.). با توجه به استفاده متوالی این عملگرها، عملیات بستن (فرسایش- اتساع) و باز کردن (اتساع- فرسایش) اعمال می شود. در الگوریتم فیلتر مورفولوژی پیشرونده، نقاط دارای حداقل ارتفاع در یک پنجره انتخاب شده و یک سطح تقریبی به عنوان مکانهای هندسی این نقاط تعیین میشود. سطوح ثانویه با انجام عملیات باز کردن به سطح توصیف شده اولیه تولید می شوند. دو سطح با در نظر گرفتن یک مقدار آستانه ( Δساعتمترآایکس.) و نقاط زیر مقدار آستانه به عنوان نقاط زمین دسته بندی می شوند. نه تنها مقدار آستانه اختلاف ارتفاع، بلکه انتخاب اندازه پنجره نیز برای دستیابی به نتایج خوب در یک فیلتر مورفولوژیکی حیاتی است. اندازه پنجره انتخاب شده را می توان با توجه به اندازه بزرگترین شی در فضای کاری بزرگ کرد تا اشیاء غیرزمینی را به طور موثر شناسایی و فیلتر کرد [ ۴۹ ]]. در عمل، در طول فرآیند فیلتر کردن، اندازه پنجره به تدریج افزایش می یابد. از آنجایی که فیلتر مورفولوژیکی با اندازه پنجره ثابت قادر به تشخیص و حذف اندازهگیریهای ساختمانها و درختان از دادههای ابر نقطهای است، با این حال، تشخیص تمام اجسام غیرزمینی با اندازههای مختلف دشوار است. افزایش اندازه پنجره راه حلی برای افزایش کارایی فیلتر است. نقاط زمین با مقایسه مقدار نقاط با آستانه متمایز می شوند. آستانه اختلاف ارتفاع را می توان با توجه به شیب توپوگرافی در یک منطقه مورد مطالعه تعیین کرد. با فرض ثابت بودن شیب، رابطه بین حداکثر اختلاف ارتفاع ( دساعتمترآایکس(تی)،ک) برای زمین ( تیاندازه پنجره ( wک) در کتیساعتتکرار و شیب زمین ( س) به صورت فرموله شده است:
و بر این اساس، آستانه اختلاف ارتفاع دساعتتی،کاست:
جایی که دساعت۰آستانه اختلاف ارتفاع اولیه است، سشیب است، جاندازه سلول است و دساعتمترآایکسحداکثر آستانه اختلاف ارتفاع [ ۴۹ ] است.
با استفاده از فیلترهای طبقه بندی آدرس دهی شده، DEM ها ( Dتیممنو Dتیممنمن) با وضوح شبکه ۱ متری که کل منطقه مورد مطالعه را پوشش می دهد، به ترتیب از داده های ابر نقطه فتوگرامتری LiDAR هوایی و پهپاد با استفاده از Envi LiDAR (فیلتر متراکم سازی پیشرونده با الگوریتم ATIN) و نرم افزار Global Mapper (الگوریتم فیلتر مورفولوژی پیشرونده) تولید شدند. در نتایج، نرم افزار Global Mapper در استخراج و حذف اشیاء مصنوعی به منظور بدست آوردن DTM ها موفق تر بود. دقت برتر DTM ها، تولید شده با نرم افزار Global Mapper و فیلتر مورفولوژیک در آمار نتایج آزمایش مدل ژئویدی محلی واضح است (لطفاً به بخش ۳ مراجعه کنید ).
۲٫۵٫ مدلهای ژئوئیدی منطقهای مورد استفاده در اعتبارسنجی
مدلهای ژئوئیدی را میتوان با استفاده از یکی از چند روش ارائهشده در ادبیات و در دسترس کاربران به عنوان یک تابع تحلیلی یا به صورت شطرنجی تعیین کرد [ ۱۰ ]. در کاربردهای ژئودزی، پارامترهای ارتفاع ژئوئید ( نبه دست آمده از یک مدل ژئوئید مناسب برای اهداف مختلفی از جمله تبدیل ارتفاعات بیضی شکل GNSS به ارتفاعات فیزیکی که در مبدأ عمودی منطقه ای قرار دارند، محاسبه اصلاحات و کاهش مشاهدات زمینی به سطح مرجع، بازرسی فضای داخلی زمین، مشاهده استفاده می شود. و پیشبینی انتقال جرم زمین و غیره. با توجه به دقت مورد نیاز اطلاعات ارتفاع، یک مدل زمینوئیدی مناسب انتخاب و در محاسبات استفاده میشود. در بسیاری از پروژههای مهندسی، مطالعات استقرار زیرساختهای زمینشناسی و کاربردهای نقشهبرداری در مقیاس بزرگ، دقت مدل ژئوئیدی مورد نیاز کمتر از ۵ سانتیمتر است، در حالی که در مطالعاتی مانند استقرار سیستم اطلاعات جغرافیایی، بررسیهای باستانشناسی، کاربردهای جنگلی،۵۰ ]. به موازات پیشرفت تکنیکهای GNSS و استفاده از آنها در برنامههای نقشهبرداری و نقشهبرداری، بسیاری از کشورها مدل ژئویدی منطقهای با دقت بالا را بهعنوان بخشی از زیرساختهای ژئودتیک ملی خود به پزشکان و نقشهبرداران ارائه میکنند تا از آن پشتیبانی و بازده ماهوارهای را افزایش دهند. تکنیک های موقعیت یابی در کاربردهای زمین شناسی و نقشه برداری [ ۵۱ ، ۵۲ ]. در ترکیه که منطقه مورد مطالعه در غرب کشور واقع شده است ( شکل ۱ )، دقت جدیدترین مدل ژئوئید منطقه ای در دسترس عموم (Turkey Geoid 2003– TG03) ~ 8.0 سانتی متر است. این دقت برای نقشههای مقیاس بزرگ و مطالعات تولید دادههای مکانی و بسیاری از پروژههای مهندسی کافی نیست [ ۱۴ ].
مدل TG03 یکی از مدل های ژئوئیدی است که در این تحقیق مورد استفاده قرار گرفت. آن را با مدلهای ژئوئیدی مشتقشده از DTMهای تولید شده به ترتیب در قالبهای شبکهای و نقطهای مقایسه کردند. مدل TG03 توسط اداره کل نقشه برداری محاسبه و به عنوان جدیدترین مدل رسمی ژئویدی منطقه ای ترکیه در داده های شبکه رزولوشن ۳ دقیقه قوس برای کاربران غیرنظامی منتشر شد. این مدل با استفاده از روش حذف-محاسبه-بازیابی (RCR) با کمترین مجذورات-همچینی (LSC) محاسبه شد. دادههای مورد استفاده شامل مشاهدات گرانشی زمینی توزیع شده در سراسر کشور با دقت ~۷-۸ میلیگال و وضوح فضایی ~۳۰ ثانیه قوس در دادههای گرانشی پوتسدام اصلاحشده بود [ ۵۳ ، ۵۴]. علاوه بر این، دادههای گرانش دریایی بهدستآمده از محصولات ارتفاعسنجی ماهوارهای توسط مشاهدات ماهوارهای ERS1، ERS2، و TOPEX/POSEIDON در دریاهای اطراف برای تکمیل مجموعه دادههای گرانش زمین در محاسبات استفاده شد. EGM96 با درجه انبساط هارمونیک ℓمترآایکس. = ۳۶۰ درجه به عنوان یک مدل ژئوپتانسیل مرجع برای TG03 استفاده شد [ ۵۵ ]. به منظور در نظر گرفتن سهم تودههای توپوگرافی با فرکانس بالا در مدل، دادههای DTM دارای شبکههای تفکیک فضایی ۴۵۰ متری در خشکی و دادههای عمقسنجی متراکم در نواحی خط ساحلی مورد استفاده قرار گرفتند [ ۵۳ ]. شامل تعدادی از دادههای GNSS/همسطح که بهطور پراکنده در سراسر کشور در محاسبات توزیع شدهاند، ارتفاعهای ژئوئیدی توسط مدل TG03 بر روی داده مختصات ITRF96 و داده عمودی منطقهای ترکیه (TUDKA99) نصب شده است. مقادیر ارتفاع ژئوئید در نقاط کنترل ژئوید پراکنده (نگاه کنید به شکل ۷ ) از گره های شبکه TG03 با استفاده از روش وزن دهی معکوس فاصله بین یابی شد و با ارتفاعات محاسبه شده ژئوئید که از مدل های ژئوئید محلی به دست آمده توسط تفاوت های DTMs مقایسه شد.۵۶ ]. از آنجایی که مدل TG03 قبلاً بهعنوان دادههای شبکه ارائه شده است، نتایج مقایسه مدلهای ژئوئید محلی به شکل شبکه با مدل TG03 به راحتی در گرههای شبکه تولید شده و بهعنوان «سطوح اختلاف ارتفاع ژئوئید» در بخش ۳ تجسم شد .
در کاربردهای خاصی که دقت مدل ژوئیدی در سطح دسی متر کافی است، مدلهای پتانسیل ژئوپتانسیل جهانی ( ن≈نجیجیم) ممکن است دقت لازم را ارائه دهد. مدلهای ژئوپتانسیل جهانی به عنوان معادلات انبساط هارمونیک کروی با ضرایب تا درجه / مرتبه معین (d/o) منتشر میشوند. دقت این مدلهای جهانی از سال ۲۰۰۰ با مشارکت دادههای مأموریتهای ماهوارهای میدان گرانش زمین، یعنی CHAMP، GRACE، GOCE و اخیراً GRACE-FO [ ۵۷ ] به طور قابلتوجهی بهبود یافته است. معادله (۷) فرمول ریاضی مقدار ارتفاع ژئوئید را با استفاده از ضرایب انبساط هارمونیک کروی [ ۹ ] ارائه می کند.
که در آن ( θ ، λ، r ) به ترتیب هم عرض جغرافیایی، طول جغرافیایی و شعاع زمین مرکزی نقطه محاسبه هستند. آشعاع محور اصلی بیضی مرجع است. GM حاصلضرب ثابت گرانش و جرم زمین است. Δسی¯ℓمترو اس¯ℓمترضرایب هارمونیک کروی کاملا نرمال شده، مربوط به پتانسیل نرمال بیضی مرجع از درجه خاصی از ℓو m را سفارش دهیدپ¯ℓمتر( جoسθ)توابع لژاندر مرتبط کاملاً نرمال شده هستند. مدل های ژئوپتانسیل جهانی با ضرایب هارمونیک کروی آنها از تعدادی از مراکز داده بین المللی به دست آمده است. مرکز بینالمللی مدلهای زمین جهانی (ICGEM) فهرست تقریباً کاملی از مدلهای پتانسیل جغرافیایی را ارائه میکند که از سال ۱۹۶۶ منتشر شدهاند [ ۱۵ ].
در تست های عددی این مطالعه، یکی از مدل های ژئوپتانسیل با وضوح بالا، EIGEN6C4 ( ℓمترآایکس.=۲۱۹۴) (EIGEN=”مدل گرانشی بهبود یافته اروپایی زمین با تکنیک های جدید”)، ارزیابی و با مدل ژئوئیدی محلی مشتق شده از تکنیک های فتوگرامتری [ ۵۸ ] مقایسه شد. وضوح فضایی مدل مربوط به حداکثر درجه انبساط آن ~۹ کیلومتر است. در حداکثر درجه انبساط، دقت گزارش شده آن با استفاده از RMSE اختلاف ارتفاع ژئوئید در ترکیه ~۱۲ سانتی متر است [ ۵۷ ]. در آزمایشهای عددی مطالعه، EIGEN6C4 (با d/o 2194) استفاده شد و ارتفاعات ژئوئیدی (معادله (۷)) از مدل هم در نقاط کنترل ژئوید ( شکل ۷ ) و هم در شبکه محاسبه شد. گره ها برای مقایسه های مبتنی بر سطح. در محاسبه با مدل ژئوپتانسیل، از سرویس محاسبه ICGEM استفاده شد [ ۱۵]. ارتفاع ژئوئید محاسبه شده به مبدأ ITRF (بیضی مرجع GRS80) ارجاع داده شد تا با روش های فتوگرامتری با مدل های ژئوئید محلی قابل مقایسه باشد.
پس از محاسبه مدلهای ژئوییدی، یکی دیگر از فرآیندهای حیاتی، اعتبارسنجی صحت آنها با استفاده از دادههای مستقل و روش مناسب قبل از انتشار این مدلها برای کاربران است. مجموعه دادههای زمینی مستقل با دقت بالا برای ارزیابی دقت خارجی آنها مورد نیاز است. در این منظور دادههای GNSS/همسطحسازی با دقت بالا، انحرافات اخترژئودتیکی مقادیر عمودی، و همچنین مشاهدات سطح دریا در ایستگاههای جزر و مد (برای اعتبارسنجی در امتداد خط ساحلی) معمولا استفاده میشوند [ ۱۲ ].]. با این حال، دادههای ژئوئیدی محلی بهدستآمده از تکنیکهای فتوگرامتری تاکنون برای تعیین یا اعتبارسنجی مدلهای ژئوئیدی استفاده نشدهاند. به این ترتیب، آزمایشهای عددی، که برای شفافسازی قابلیت استفاده از DTMهای مشتقشده از تکنیکهای فتوگرامتری در مدلسازی و اعتبارسنجی ژئوئیدی انجام شد، سهم اصلی را در مطالعات تعیین ژئوئید ایجاد میکند. فصل زیر نتایج بهدستآمده از آزمایشهای عددی ژئوئیدهای محلی توسط DTMهای فتوگرامتری LiDAR هوایی و UAV را مورد بحث قرار میدهد.
۳٫ نتایج و بحث
۳٫۱٫ ارزیابی دقت مدل ژئویدی محلی بر اساس استراتژی تولید DEM
در بخش اول آزمایشهای عددی، DTMها از ابرهای نقطهای برای تعیین مدل ژئوئید محلی تولید شدند. در نسل آنها، دو الگوریتم فیلتر متفاوت در طبقه بندی استفاده شد. یکی از الگوریتم ها فیلتر متراکم پیشرونده با الگوریتم ATIN بود که با استفاده از نرم افزار Envi LiDAR [ ۴۷ ] اعمال شد. مورد دیگر، الگوریتم فیلترینگ مورفولوژیکی مترقی بود که با استفاده از نرم افزار Global Mapper GIS [ ۴۰ ] اعمال شد.]. در نتایج، دو DTM توسط داده های هوایی LiDAR برای به دست آوردن ارتفاعات بیضی شکل نقاط زمین در دست بودند. از سوی دیگر، دو DTM توسط تصاویر فتوگرامتری پهپاد برای ارائه ارتفاعات ارتومتریک همان نقاط در مبدأ TUDKA99 بودند. بر این اساس، دو مدل سطح زمین ژئوئیدی محلی با استفاده از جفتهای DTM ( ن=ساعتDTMمن-اچDتیمII) به ترتیب توسط خروجی های Envi LiDAR و Global Mapper.
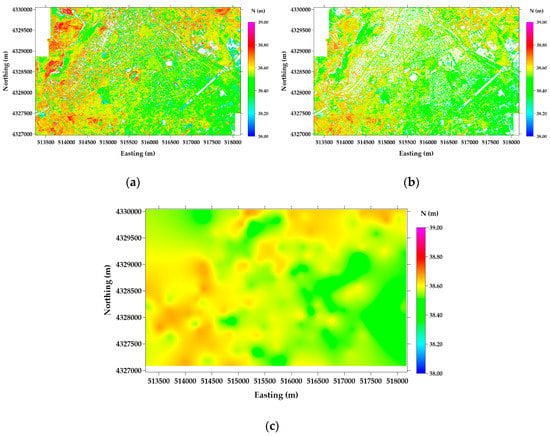
شکل ۱۱ سطوح زمینی محلی محاسبه شده را با استفاده از DTMهای تولید شده توسط Envi LiDAR (a) و Global Mapper (b) نشان می دهد. جدول ۲ آمار ارتفاعات ژئوئیدی محلی محاسبه شده در گره های شبکه (رزولوشن فضایی ۱ متر) را به همراه کل محل آزمایش نشان می دهد. با این حال، با توجه به سطوح مدل ژئوئیدی در شکل ۱۱ و مقادیر حداکثر، حداقل آنها در جدول ۲ ، به این نتیجه رسیدیم که مدلهای ژئوئیدی که از دو نرمافزار مختلف به دست آمدهاند، شامل اشتباهات هستند. بنابراین، تشخیص اشتباه با یک سیگما (۱- σ) آزمون اعمال شد و مقادیر ارتفاع ژئوئید که از میانگین مقدار ارتفاع ژئوئید در منطقه بیش از ۱- انحراف دارند. σ(مربوط به نگه داشتن نقاط دارای مقادیر ارتفاع ژئوئید در فاصله اطمینان ۶۸٪)، از هر مجموعه داده حذف شد. سطوح ارتفاع ژئوئید بعد از ۱- σآزمون و آمار آنها به ترتیب در شکل ۱۲ و جدول ۳ آورده شده است.
هنگامی که آمار به دست آمده در جدول ۲ و جدول ۳ با هم مقایسه می شوند، مشاهده می شود که رفع اشتباهات با استفاده از ۱- σآزمایش با موفقیت انجام شد و دو سطح مدل ژئوئید محلی توسط Envi LiDAR و Global Mapper اکنون به یکدیگر نزدیکتر هستند. با این حال، با مقایسه آمار دو سطح مدل ژئوئیدی در جدول ۳ ، توزیع ارتفاعات ژئوئید با استفاده از انحراف استاندارد آنها با ~۴٫۱ سانتی متر متفاوت است که در واقع برای اهداف مدل سازی ژئویدی محلی در کاربردهای ژئودتیکی قابل توجه است.
در ردیف آخر جدول ۳ ، آمار ارتفاعات ژئوئید به دست آمده در نقاط کنترل پراکنده ژئوئید که توزیع آنها در شکل ۷ مشاهده می شود ، آورده شده است. ارتفاعات ژئوئیدی در این نقاط کنترل ژئوئید با درون یابی از مدل سطح زمین ژئوئیدی محلی توسط راه حل شبکه ای Global Mapper محاسبه شد.
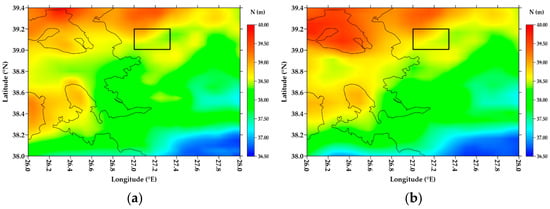
در شکل ۱۲ ج، سطح ژئوئید موضعی نقطه ای نشان داده شده است. این سطح با درونیابی مقادیر ارتفاع زمین در نقاط کنترل ژئوئید پراکنده ارائه شده در شکل ۷ ایجاد شد. در محاسبه مدل سطح از الگوریتم زمین آماری کریجینگ در نرم افزار Surfer استفاده شد. از این شکل، مقدار تغییر و جهت شیب سطح ژئوئید محلی تشخیص داده می شود. این الگوی سطح ژئوئید محلی برگرفته از رویکردهای فتوگرامتری با مدل ژئوئید منطقه ای (TG03) (سطح مدل ژئویدی TG03 در شکل ۱۳ الف نشان داده شده است) و مدل ژئوئید جهانی (EIGEN6C4) (سطح مدل ژئوئید جهانی در شکل ۱۳) مقایسه شد. ب). شکل ۱۲ و شکل ۱۳ را مقایسه کردمشاهده میشود که هر سه مدل سطح ژئوئید دارای روند مشخصه یکسانی هستند، اما در سطوح مختلف جزئیات. از آنجایی که سطح ژئوئید محلی جزئیات بیشتری دارد ( شکل ۱۲ ج) و در مقایسه با ژئوئید محلی، سطح ژئوئید منطقه ای صاف تر است ( شکل ۱۳ الف) و سطح مدل ژئوئید جهانی به طور طبیعی کم جزئیات ترین مدل سطح است ( شکل ۱۳ ب) در منطقه در نظر گرفته شده از آنجایی که این شکل بسته به نقاط داده نسبتاً متراکم ایجاد شده است، ویژگی صاف سطح زمین ژئویدی محلی را به سختی می توان در شکل ۱۲ ج تشخیص داد. هنگامی که شکل ۷ ، شکل ۱۲ ج و شکل ۱۳a،b با هم در نظر گرفته می شوند، تایید می شود که روند نزولی سطح ژئوید از شمال به جنوب از ارتفاعات توپوگرافی نشان داده شده در شکل ۷ با تغییر رنگ نمادهای نقطه پیروی می کند.
۳٫۲٫ مقایسه مدلهای ژئوئید محلی با تکنیکهای فتوگرامتری با ژئوئیدهای منطقهای و جهانی
در بخش دوم آزمایشهای عددی، مدلهای ژئویدی محلی تولید شده با استفاده از تکنیکهای فتوگرامتری با مدل ژئوئید منطقهای TG03 و مدل ژئوپتانسیل جهانی EIGEN6C4 مقایسه شدند. ℓمترآایکس. = ۲۱۹۴)، و آمار به دست آمده از این مقایسه ها عملکرد برازش مدل های مقایسه شده را با یکدیگر روشن می کند. ارول و همکاران [ ۵۴ ] مدل TG03 را با استفاده از دادههای GNSS/همسطح با دقت بالا در یک منطقه بزرگتر بسیار نزدیک به محل آزمایش ما آزمایش میکند و دقت خارجی TG03 ~ 8.0 سانتیمتر را بر حسب RMSE تفاوت ارتفاع ژئوئید در معیارهای GNSS/همسطحسازی گزارش میکند. ارول و همکاران [ ۵۷ ] یک مدل پتانسیل جغرافیایی با وضوح بالا، EGM2008 ( ℓمترآایکس.= ۲۱۹۴) [ ۵۹ ]، با استفاده از همان مجموعه داده های GNSS/همسطح در ناحیه نزدیک به سایت آزمایش برگاما و دقت خارجی آن را ~ ۱۲٫۰ سانتی متر با استفاده از RMSE گزارش می کند. اگرچه دقت خارجی EIGEN6C4 در این مقاله منتشر نشده است [ ۵۷]، در تهیه آن، این مدل ژئوپتانسیل با درجه/ نظم انبساط برابر با EGM2008 نیز تایید شده است. در نتایج منتشر نشده، مشاهده شده است که EIGEN6C4 تقریباً همان دقت را با EGM2008 نشان می دهد. دلیل داشتن دقت مشابه این دو مدل جهانی این است که درجات انبساط هارمونیک کروی هر دو مدل پتانسیل جغرافیایی یکسان است و از مجموعه داده های تقریبا مشابهی در محاسبات آنها استفاده شده است. به عنوان نتیجه گیری از این موضوع، دقت خارجی مدل EIGEN6C4 را در این مطالعه نیز ۱۲٫۰ سانتی متر در محل آزمایش فرض کردیم.
دقت ارتفاعات بیضی شکل به دست آمده از ابر نقطه LiDAR هوایی ۷٫۰ سانتی متر در [ ۱۳ ] گزارش شده است. با توجه به ارتباط شخصی با ارائهدهنده دادههای ابر نقطه تصویر فتوگرامتری پهپاد، دقت ارتفاعات ارتومتریک بدستآمده از ابر نقطه فتوگرامتری پهپاد ~۵-۶ سانتیمتر است. با توجه به دقت های شناخته شده داده ها، ما دقت ارتفاعات ژئوئید تولید شده با استفاده از مدل های ژئوئید محلی با اصول انتشار خطا را برآورد کردیم: σن=σساعت۲+σاچ۲= ~ ۹٫۲ سانتی متر در این حالت، مدلهای ژئوئیدی محلی محاسبهشده در این مطالعه، با مدلهای TG03 و EIGEN6C4 با دقت قابل مقایسه هستند و قابلیت اعتبارسنجی این مدلهای منطقهای و جهانی را دارند.
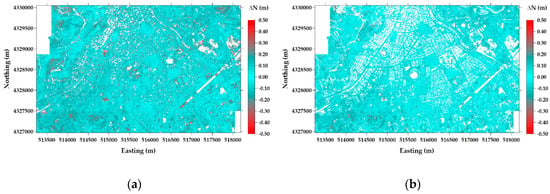
شکل ۱۴ تفاوت بین ژئوئیدهای محلی تولید شده از دو سطح مدل نرم افزاری و منطقه ای (TG03) را نشان می دهد. در شکل ۱۴ یک سطح مدل TG03 با سطح زمین ژئوئید محلی Envi LiDAR و در (ب) با سطح ژئوئید محلی Global Mapper مقایسه شده است. با مقایسه نقشههای اختلاف ارتفاع ژئوید و با توجه به توزیع اختلافات در سطح منطقه، میتوان گفت که سطح ژئوئید محلی محاسبهشده با نرمافزار Global Mapper با سطح مدل TG03 سازگاری بیشتری دارد. این نتیجه با آمار برازش داده شده در جدول ۴ تایید می شود . مقادیر میانگین تفاوتها نشان میدهد که سطوح ژئوئیدی محلی تغییر سیستماتیک از TG03 را شامل نمیشود و دادههای آنها کاملاً سازگار است. آخرین ردیف جدول ۴آمار اختلاف ارتفاع ژئوئید درون یابی شده بین مدل ژئوئید محلی (مدل شبکه ای نقشه جهانی) و TG03 در نقاط کنترل انتخاب شده را نشان می دهد. در مقایسه با نتایج بهدستآمده از مدل ژئوئید محلی شبکهای (دارای انحراف معیار ۹٫۸ سانتیمتر و میانگین مقادیر ۱٫۰ سانتیمتر برای اختلاف ارتفاع ژئوئیدی محلول نقشهبردار جهانی و TG03)، مشاهده شد که مدل ژئوئید محلی نقطهای دارای است. تناسب بهتر با مدل ژئوئیدی منطقه ای TG03 (با انحراف استاندارد ۴٫۶ سانتی متر و مقادیر میانگین ۵٫۹- سانتی متر).
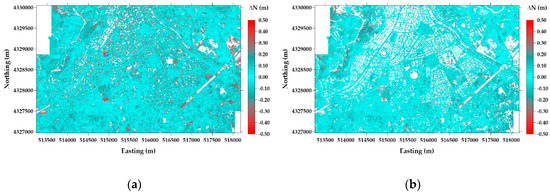
مقایسههای مشابهی با استفاده از مدل ژئوپتانسیل جهانی EIGEN6C4 نیز انجام شد. شکل ۱۵ نقشه های تفاوت بین سطوح مدل ژئوئید محلی و ژئوئید جهانی (EIGEN6C4) را برای راه حل های ژئوئید محلی Envi LiDAR (a) و Global Mapper (b) نشان می دهد. آمار مربوط به سطح زمین و مقایسه نقطه ای در جدول ۵ آورده شده است.
در نتایج آزمایش، برازش مدل ژئوئید جهانی با مدل ژئوئید محلی کمی بدتر از مدل ژئوئید منطقه ای است. در ارزیابی نقطهای، تفاوت ارتفاع ژئوئید مدل ژئوئید محلی (که از راهحل شبکهای Global Mapper برگرفته شده است) از مدل ژئوئید جهانی (EIGEN6C4) بین -۱۲٫۰ سانتیمتر و ۱۹٫۵ سانتیمتر با میانگین ۰٫۰ سانتیمتر و استاندارد ۵٫۲ سانتیمتر متفاوت است. انحراف. تفاوت ارتفاع ژئوئید سطح ژئوید محلی از TG03 و EIGEN6C4، به ترتیب، در نقاط کنترل ژئوئید، در شکل ۱۶ نشان داده شده است.
در شکل ۱۴ و شکل ۱۵ ، با توجه به توزیع اختلاف ارتفاعات ژئویدی مدل ژئویدی محلی به دست آمده از روش های فتوگرامتری و مدل های ژئوئید منطقه ای/جهانی، مشاهده می شود که عمده تفاوت ها در ناحیه شهری انباشته شده است. دلیل این امر میتواند محدودیت قابلیت نرمافزار مورد استفاده در تولید DTMها باشد – یا تغییر توپوگرافی به دلیل ساختارهای منطقه بین تاریخ کمپینهای اندازهگیری فتوگرامتری LiDAR و پهپاد در هوا.
۳٫۳٫ ارزیابی قابلیت استفاده از تکنیک های فتوگرامتری برای مدل سازی ژئویدی محلی
در ادبیات، مطالعات مختلفی وجود دارد که دقت عمودی بهدستآمده از روشهای فتوگرامتری را بر اساس اعتبارسنجیهای درجا گزارش میکنند. در این مطالعات، دقت های گزارش شده بسته به کیفیت حسگر، استراتژی های پردازش داده ها، طرح اندازه گیری طراحی شده و همچنین شرایط منطقه نقشه برداری، بین سانتی متر تا دسی متر متفاوت است [ ۲۳ ، ۳۰ ، ۳۸ ، ۳۹ ، ۶۰ ، ۶۱ .]. مطالعات منتشر شده ثابت کرد که با بهینه سازی کارآمد و تحلیل امکان سنجی در پروژه ها، می توان بودجه خطا را به صورت حرفه ای مدیریت کرد تا خطاهای سیستماتیک و تصادفی در اندازه گیری ها با تکنیک های فتوگرامتری به حداقل برسد. از این رو به حداقل رساندن خطاها به طور قابل توجهی دقت مختصات سه بعدی حاصل از این تکنیک ها را بهبود می بخشد.
با افزایش استفاده از تکنیکهای GNSS در کاربردهای مهندسی، که مبتنی بر دادههای مکانی و اطلاعات ارتفاع است، نیاز عملی به یک مدل ژئوئید منطقهای پدیدار شد [ ۶۲ ]. ارتفاعات فیزیکی نقطه ای با تبدیل ارتفاعات بیضی شکل GNSS با استفاده از مدل ژئوئید تعیین می شود. دقت و تفکیک مکانی مدل ژئویدی به کار گرفته شده بر این اساس نقش غالبی در دقت ارتفاعات فیزیکی به دست آمده دارد [ ۶۳ ]]. بسته به تکنیک مدل سازی مورد استفاده، دقت و تفکیک مکانی مدل ژئوئید متفاوت است. از دیدگاه کلی، مدلهای ژئوپتانسیل جهانی دارای مزیتی برای ارائه ارتفاع ژئوید در سطح جهانی هستند، اما نقطه ضعف قدرت تفکیک فضایی پراکنده به دلیل درجات محدود گسترش هارمونیک کروی، در نتیجه دقت محدود در نتیجه باندهای طیفی حذف شده است. از طیف میدان گرانش به غیر از مدلهای ژئوپتانسیل جهانی، مدلهای ژئویدی منطقهای که با استفاده از رویکرد گرانشی تعیین میشوند معمولاً استفاده میشوند. با این حال، دقت این مدل ها تحت تأثیر کیفیت داده های گرانشی استفاده شده در محاسبات آنها است. چگالی و دقت داده های گرانشی مورد نیاز برای تعیین یک مدل ژئویدی با دقت سانتی متر در [ ۵۴ ] بحث شده است.]. از آنجایی که مدل ژئوئید گرانشی منطقهای دقت کافی را در ترکیه ارائه نمیکند، در بسیاری از پروژههای نقشهبرداری و نقشهبرداری، مدلهای ژئویدی GNSS/همسطح محلی ارائه شده و به عنوان جایگزینی برای راهحل گرانشی استفاده میشوند. [ ۱۱ ] و [ ۶۴ ] بحثی را در مورد دقت و توزیع مورد نیاز معیارهای کنترل GNSS/همسطح برای تعیین دقت سانتی متری مدل ژئویدی محلی ارائه می دهند.
هر یک از این روشهای ژئودتیکی برای محاسبه مدل ژئویدی با دقت سانتیمتری، نیازمند مشاهدات زمینی متراکم و دقیق است که پرزحمت، زمانبر و پرهزینه است. در مناطق چالش برانگیز مانند مناطق کوهستانی، مناطق جنگلی متراکم، دریاچه های بزرگ و حوضه رودخانه ها، انجام اندازه گیری های زمینی برای اهداف مدل سازی ژئوئیدی حتی غیرممکن است. با در نظر گرفتن مشکلات در اکتساب دادههای زمینی برای هدف مدلسازی زمین، ما یک رویکرد جدید را پیشنهاد و بررسی کردیم که در آن تکنیکهای فتوگرامتری به عنوان جایگزینی برای تعیین و اعتبارسنجی مدل ژئوئیدی محلی در این مطالعه استفاده میشوند. وضوح فضایی بالای DTMهای به دست آمده از تکنیکهای فتوگرامتری یک مزیت در مدلسازی ژئوئیدی به منظور دربرداشتن طیف کامل ژئوئید در مدل است. از طریق دقت، نتایج ما نشان داد که با استفاده از تکنیکهای فتوگرامتری، تعیین یک مدل ژئوئید محلی با دقت بهتری نسبت به مدل ژئوئید جهانی امکانپذیر است. روشهای فتوگرامتری دقت بالاتری را در مناطق دشت ارائه میدهند که با دقت مدلهای ژئوئید گرانشی منطقهای که با دقت کم و دادههای گرانش زمینی پراکنده مقایسه میشوند، مقایسه شوند. با توجه به نتایج ترسیم شده در مطالعه ما، این نتیجه حاصل میشود که تکنیکهای فتوگرامتری پتانسیل خوبی برای ارائه راهحلهای مدل ژئویدی محلی یا دادههای اعتبارسنجی برای مدلسازی ژئوئید دارند. با این حال، در مورد حاضر، نمی توان گفت که این فناوری ها مناسب ترین گزینه برای هدف مدل سازی ژئوئید هستند. بررسیهای بیشتر برای کشف حداکثر دقت عمودی DTMها که از تکنیکهای فتوگرامتری ایجاد میشوند، ضروری است.