
خلاصه
:
بینشهای مرتبط ارائه شده توسط مدلهای شهر سهبعدی، شهرهای هوشمند و سیاستهای مدیریتی آنها را تا حد زیادی بهبود میبخشد. در محیط های ساخته شده شهری، ساختمان ها اغلب نشان دهنده ترین ویژگی های مطالعه شده و مدل شده هستند. فرمت CityJSON جایگزینی سبک و مناسب برای توسعه دهندگان برای CityGML پیشنهاد می کند. این مقاله بهبود قابلیت استفاده مدلهای سهبعدی را ارائه میکند که یک روش تولید خودکار در CityJSON را ارائه میکند تا از فشردگی، بیان و قابلیت همکاری اطمینان حاصل شود. علاوه بر نرخ انطباق بیش از ۹۲ درصد برای هندسه و توپولوژی، مدل تولید شده امکان مدیریت اطلاعات متنی مانند ابرداده و سطوح دقیق جزئیات (LoD) را به صورت داخلی می دهد. با شکستن فرآیند تولید ساختمان،
کلید واژه ها:
LiDAR ; مدل های سه بعدی شهر ; CityJSON ; شهرهای هوشمند ؛ ابر نقطه ; تقسیم بندی مدل سازی سه بعدی
۱٫ معرفی
بینش مرتبط به دست آمده از استفاده از مدلهای دیجیتال، مدیریت شهرها را به روشی هوشمندتر ممکن میسازد. با توجه به پویایی چشمگیر شهرهای هوشمند ، در نظر گرفتن عوامل متعددی برای تشخیص محیطی، شهرسازی و … ضروری است. در این میان، نمایش سه بعدی بافت شهری نقش ویژه ای دارد. به عنوان یک لایه یکپارچه سازی برای سایر عوامل و داده های مرتبط عمل می کند [ ۱ ]. در این زمینه، مدلهای استاندارد، مانند CityGML، با طیف گستردهای از کلاسها و ویژگیهای شی سهبعدی شهر پیوند خورده ظهور کردهاند. ۲]]. قابلیت استفاده یک مدل شهر سه بعدی به کیفیت آن، به قابلیت اطمینان اشیاء شهر سه بعدی آن (به عنوان مثال، دقت معنایی، هندسی، توپولوژیکی، و زمانی)، در دسترس بودن و درجه تطبیق پذیری آن بستگی دارد: فشردگی، بیان، و قابلیت همکاری.
تولید مدلهای شهر از دادههای مکانی در CityGML یک روش استاندارد است [ ۳ ]. با این حال، همانطور که در حال حاضر استفاده می شود، CityGML دارای چندین محدودیت در مورد تعاریف سطح جزئیات [ ۴ ]، فقدان ابزارهای مقایسه استاندارد و نرمال شده [ ۵ ]، و اسناد متنی (یعنی فراداده) [ ۶ ] است.
این مقاله به منظور پرداختن به تولید خودکار مدلهای شهر سهبعدی فشرده و سازگار با استفاده از ابرهای نقطهای تشخیص نور و محدوده (LiDAR) و CityJSON [7]، جایگزینی سبک وزن برای CityGML است. مزایای استفاده از CityJSON قبلاً نشان داده شده است. با وجود این، در حال حاضر به ندرت در عمل استفاده می شود. یکی از دلایل این امر فقدان مدل های CityJSON در دسترس عموم است ( https://www.cityjson.org/datasets/ )، که نتیجه روش های محدود تولید CityJSON است. در این تحقیق، ما یک روش جدید تولید CityJSON را پیشنهاد میکنیم که بر مولفههای ایجاد ساختمان پیشرفته از دادههای LiDAR متکی است [ ۳ ، ۸ ].
علاوه بر مزیت فشرده بودن استفاده از CityJSON، روش تولید مستقیم CityJSON مدیریت بومی ابرداده و سطوح دقیق جزئیات (LoD) را امکان پذیر میسازد. این دو نکته باید قابلیت استفاده از مدل های شهر سه بعدی را بهبود بخشد و امکان ایجاد آنها را به شیوه ای ثابت و مستقیم فراهم کند. این مقاله به شرح زیر سازماندهی شده است. ابتدا، فرمتهای داده CityGML و CityJSON و همچنین روشهای اصلی تولید ساختمان از دادههای LiDAR را ارائه میکنیم ( بخش ۲ ). سپس، ما هر مرحله از روش شناسی خود را برای تولید ساختمان های CityJSON از ابرهای نقطه سه بعدی ترسیم می کنیم ( بخش ۳ ). یعنی تقسیمبندی رایانه شخصی، مدلسازی هندسی گام به گام و شکلگیری مدل CityJSON. که در بخش ۴، ما مزایای مدل های CityJSON را که مستقیماً تولید می شوند مورد بحث قرار می دهیم و کیفیت نتایج را با استفاده از چندین ابزار عادی و رسمی ارزیابی می کنیم. در نهایت، نتیجه گیری های خود را در بخش ۵ بیان می کنیم .
۲٫ آثار مرتبط
۲٫۱٫ روش های ساخت و تولید
در میان اشیاء شهر سه بعدی، ساختمان ها ستون فقرات بسیاری از برنامه های شهرهای هوشمند هستند . بدون شک، ارائه یک بازسازی هندسی منسجم همچنان یک چالش است. LiDAR یک روش ارزشمند برای جمع آوری داده ها برای مدل سازی سه بعدی است. با توجه به اینکه تقسیم بندی و طبقه بندی ابرهای نقطه ای نیز به طور فزاینده ای کارآمد می شوند، استفاده از اطلاعات به دست آمده از داده های LiDAR موجود در هوا (یعنی اسکن لیزری هوابرد (ALS)) بسیار زیاد و پرکار است. استفاده از آن در بسیاری از حوزهها، مانند بازسازی مدلهای شهر سه بعدی، ارزیابی خطر، جنگلداری، نقشهبرداری زمینشناسی، حوضههای آبخیز، و بررسی رودخانهها کمک میکند. سهم بزرگ اطلاعات طبقه بندی شده و معنایی در تصمیم گیری غیرقابل انکار است [ ۹ ].
یک طبقه بندی برای بازسازی مدل شهری از داده های LiDAR [ ۳ ] پیشنهاد شده است. این روش ها را به سه خانواده طبقه بندی می کند: داده محور، مدل محور و ترکیب محور. این به مردم امکان می دهد روش های تولید شهر را با هم مقایسه کنند. روشهای مبتنی بر داده (منشوری و چندوجهی) نمایشهای بسیار دقیقی از صحنههای شهری، بهویژه مدلسازی سقفهای آزاد شکل [ ۱۰ ] تولید میکنند. این نمایشها برای ارائه صحنههای دنیای واقعی بسیار امیدوارکننده هستند، زیرا طبقات زیادی از اشیاء شهری (ساختمانها، پوشش گیاهی و جادهها) را در نظر میگیرند. با این حال، هنگامی که آنها به صورت آنلاین یا از طریق تلفن همراه مبادله و استفاده می شوند، پیچیدگی آنها اغلب یک اشکال مهم است.
ابرهای نقطه LiDAR همراه با سایر منابع اطلاعاتی، مانند ردپای ساختمان و تصاویر موجود در هوا، بازآفرینی تصویری از واقعیت را ممکن میسازد. با این حال، تصاویر موجود در هوا برای تولید مدل های دقیق و فشرده مناسب نیست. از این رو، سنسورهای LiDAR برای تولید پشت بام ها نسبت به سنسورهای تصویری مطلوب تر هستند. در واقع، بسیاری از مسائل از استفاده از تصاویر نوری ناشی می شود: سایه ها، انسدادها، مشکلات بافت، تغییرات در روشنایی و کنتراست (اختلاف و آنتروپی) [ ۱۱ ]. LiDAR کمتر تحت تأثیر این عوامل خارجی است [ ۸]. علاوه بر این، از آنجایی که تسکین زمین باعث جابجایی و انسداد در تصاویر هوابرد در تصاویر مایل می شود، بسته به فاصله نمونه برداری از زمین، چندین نقطه LiDAR را می توان به یک پیکسل تصویر نمایش داد. این در نظر گرفتن منجر به تطبیق تصویر متراکم پیچیده می شود و همیشه منجر به یک منبع خطای اضافی می شود. با این حال، تصاویر منبع خوبی از اطلاعات برای تشخیص تغییرات و به روز رسانی مناطق تغییر یافته است [ ۸ ]. با این حال، کارهای اخیر پیشرفتهایی را برای استفاده دقیق از LiDAR و ترکیب تصاویر ارائه میدهند [ ۱۲ ].
از نظر خود منبع داده، چندین تلاش برای مقابله با ماهیت پراکنده داده های LiDAR توصیه می شود: به ویژه، ردیابی مرزهای صفحه از ابرهای نقطه ای به طور مستقیم [ ۱۳ ]. از سوی دیگر، دو روش رایج موجود برای تشخیص شکل، اجماع نمونه تصادفی (RANSAC) [ ۱۴ ] و تبدیل هاف [ ۱۵ ] است. با این حال، حتی اگر تبدیل Hough را بتوان با ارائه یک ساختار داده اختصاصی [ ۱۶ ] بهبود بخشید، RANSAC در حال حاضر سریعتر اجرا می شود (از لحاظ محاسباتی کارآمدتر) و برای تشخیص شکل صفحات سقف مناسب تر است [ ۱۷ ، ۱۸ ]. بعلاوه، RANSAC استحکام بالاتری را به موارد پرت نشان می دهد، همانطور که در [ نشان داده شده است. ۱۹ نشان داده شده است.].
یک اشکال عمده در استفاده از الگوریتمهای تشخیص شکل بدون نظارت، تعریف پارامترهای اولیه است که پتانسیل تعمیم را محدود میکند. به دلیل چگالی نقطه پراکنده، ماهیت غیر قطعی RANSAC ممکن است اشکال ناسازگار را تشخیص دهد. بسته به نقاط شروع، نتایج ممکن است متفاوت باشد. این مشکل در ابرهای نقطهای با چگالی بالا کمتر دیده میشود، با توجه به اینکه اتصالات خوشهای با کارایی بیشتری ردیابی میشوند. بنابراین تشخیص هواپیما می تواند به مثبت کاذب و / یا منفی کاذب یا هواپیماهای جعلی منجر شود [ ۲۰ ]. برای جلوگیری از تشخیص نادرست، تنظیم پارامترها اغلب به یک متخصص سپرده می شود، به خصوص در مورد ساختمان های LoD2.x [ ۲۱]]. به عنوان مثال، توجه داشته باشید که حداقل منطقه برای تشخیص صفحات سقف می تواند مشکل ساز باشد، زیرا مناطق زیر ۵۰ متر مربع قبلاً نتایج با کیفیت ضعیف تری را نشان داده اند [ ۲۲ ، ۲۳ ].
تعمیم چند ضلعی و منظم سازی شکل نیز منبعی از خطاها هستند، منبعی که در روش پیشنهادی از آن اجتناب می شود. پس از بحث در مورد خط لوله، بخش بعدی روش شناسی ما و روش شناسی پیشرفته را در تضاد قرار می دهد و هر مرحله از روش را تجزیه می کند.
۲٫۲٫ CityGML و CityJSON
استفاده از قالب داده های مشترک، مانند CityGML [ ۲ ]، به طور گسترده ای برای مدل سازی شهرها انتخاب شده است. اخیرا CityJSON [ ۷]، یک فرمت فشرده، آسان برای استفاده و توسعهدهنده، همچنین امکان ساختاربندی مدلهای شهر و تبادل آنها را از طریق دستگاههای مبتنی بر وب و تلفن همراه ارائه میدهد. این یک جایگزین قابل همکاری و مستند برای CityGML ارائه می دهد. در واقع، CityJSON بخشی از تکامل وب محور استاندارد CityGML است. CityJSON به همان طرح مفهومی CityGML احترام می گذارد – به این معنی که نیازی به کار مجدد برنامه ها از دیدگاه مفهومی ندارد – بلکه فقط از نظر قالب تبادل. بنابراین، راه اندازی رابط بین دو مدل ساده است. علاوه بر این، نشانه گذاری شی جاوا اسکریپت (JSON) کمتر پرمخاطب است و تبادل داده را سبک می کند. از دیدگاه توسعهدهندگان، مدیریت اطلاعات با JSON خواندن آنها و درک ساختار آن را آسانتر میکند. از دیدگاه کاربران،
به دلیل عدم تطبیق پذیری، XML بهترین راه حل برای تولید اطلاعات فشرده نیست. فایل های CityGML اغلب به دلیل فرمت XML ذاتی آنها بزرگ هستند. بنابراین، JSON قصد دارد مبادلات را به روشهای آسانتر برای استفاده آسانتر کند. در حال حاضر، چون بسیار جدید است، برنامه های کاربردی CityJSON زیادی وجود ندارد، اما دانشمندان قصد دارند پتانسیل آن را مطالعه کنند [ ۲۴ ، ۲۵ ، ۲۶ ]. دو روش منبع باز در حال حاضر راه حل هایی را برای تولید مدل های CityJSON ارائه می دهند: (الف) ۳Dfier امکان تولید ساختمان های شهری با مجموعه داده های توپوگرافی اکسترود را فراهم می کند. https://github.com/tudelft3d/3dfier). با این وجود، ساختمان های تولید شده به LoD 1.x (صفحه های سقف تخت) محدود می شوند. (ب) راه حل دوم یک ابزار خط فرمان است که یک مدل CityGML را به یک مدل CityJSON و بالعکس ( https://github.com/citygml4j/citygml-tools ) تبدیل می کند.
اسناد متنی (به عنوان مثال، ابرداده) در مورد اطلاعات جغرافیایی قابلیت همکاری و قابلیت استفاده آنها را بسیار بهبود بخشیده است. این عبارت کلی در مورد مدل های شهر سه بعدی نیز صدق می کند. متأسفانه CityGML هندلینگ بومی را برای این هوش متنی ارائه نمی دهد. برای به دست آوردن ابرداده های متنی، لازم است از ابزارهای اضافی مانند “افزونه دامنه برنامه ابرداده” (ADE) استفاده شود [ ۶ ]. این ADE می تواند در طرح اصلی CityGML گنجانده شود، اما پشتیبانی ADE را برای همه برنامه هایی که از این مدل استفاده می کنند تحمیل می کند. همچنین امکان ترجمه پسوند را به معادل پایگاه داده رابطه ای آن فراهم می کند.
همانطور که در مطالعات قبلی نشان داده شده است [ ۲۲ ]، اکثر روش های تولید ساختمان خروجی خود را با تمایز گزاره های کیفی، مانند شکل سقف ها (شبکه، سوله، تکیه، و غیره) [۲۲] و ویژگی های کمی (انحراف متریک) ساده می کنند. از واقعیت روی زمین، میزان دقت و غیره) [ ۲۷ ]. فراتر از شاخص های وفاداری در درون یابی صفحات و عوامل شکل، معیارهای کمی این بازسازی ساختمان را هدایت می کنند [ ۵ ]. با محدود کردن انحرافات احتمالی در هر مرحله از فرآیند ایجاد، می توان به نتیجه ای دست یافت که به بهترین وجه به مسائل هنجاری پاسخ دهد. بهبودهای جدید در CityGML، به ویژه از طریق گروه کاری کیفیت سه بعدی SIG [ ۲۸]، مجموعه ای از مقادیر را ارائه می دهد که می تواند کیفیت بازسازی را بهبود بخشد. علاوه بر این، سطح جزئیات بهبود یافته ۱۶ سطح را برای توصیف و ارزیابی جزئیات یک ساختمان پیشنهاد می کند [ ۴ ]. این سطوح فرعی در مشخصات رسمی CityGML پشتیبانی نمی شوند و کمتر مورد استفاده قرار می گیرند [ ۵ ].
۳٫ روش شناسی
هدف از این روش تجزیه نسل یک مدل شهر سه بعدی مبتنی بر اجزای XYZ ابر نقطه LiDAR، برای ایجاد یک مدل شهری نرمال شده در CityJSON است. طبقه بندی ALS نقطه-ابر صحیح فرض می شود. این امکان استخراج نقاط ساختمانی را به طور مستقل فراهم می کند. ما تصمیم گرفتیم از منابع دیگر اطلاعات استفاده نکنیم تا از اختلاط مسائل مربوط به کیفیت داده جلوگیری کنیم و روی گردش کار استخراج خودکار داده LiDAR تمرکز کنیم. با شروع با این فرض، بخش های زیر پس از توضیحات مقدماتی، مدل تولید را به طور سیستماتیک تجزیه می کنند. شکل ۱مراحل متوالی در روش را نشان می دهد: از ابر نقطه خام تا مدل شهر تولید شده. ابتدا، ابر نقطه خام با استفاده از یک الگوریتم رشد منطقه ای مبتنی بر ساختار به بخش های فرعی منسجم تقسیم می شود.بخش ۳٫۲ . پس از انجام این کار، بخشهای فرعی ابر (به عنوان مثال، خوشههای نقاط) سپس به صورت جداگانه پردازش میشوند تا ساختمانها در یک فرآیند مدلسازی هندسی گام به گام تولید شوند. در پایان، تمام اشیاء بازسازیشده به مدل شهر CityJSON در بخش ۳٫۴ الحاق میشوند .
۳٫۱٫ نظرات مقدماتی
این روش گام به گام یک شکل ترکیبی از تولید را پیشنهاد میکند که راهحلهای مبتنی بر داده و مدلمحور را ترکیب میکند، مانند بازسازی گرامر هدایتشده [ ۲۹ ]. نویسنده رویکردی را پیشنهاد میکند که با ادغام قوی دانش ساختمان مشخص میشود. این دانش در طول این فرآیند بر روی یک نمودار دانش چند مقیاسی جداگانه مدلسازی میشود. خط لوله بازسازی پیشنهادی نیز مشابه آنچه توسط TopoLAP ارائه شده است [ ۱۷] است]. با این حال، تفاوت های قابل توجهی ذکر شده است: هندسه های بازسازی شده سعی می کنند نمایش دقیق تری از ساختمان ها ایجاد کنند، اما هیچ یک از مشخصات CityGML را برآورده نمی کنند. علاوه بر این، داده های LiDAR موجود در هوا تنها منبع داده نیست. هر دوی این انتخاب ها منجر به افزایش منابع خطا می شود که در اینجا از آن اجتناب می شود.
در مواردی که برای تعیین مقادیر اکتشافی خاصی لازم بود، از مشخصات هندسی و پیشرفتهای توصیهشده برای CityGML LoD [ ۴ ] استفاده کردیم. این نکته این اثر را به شدت از سایرین متمایز می کند و میزان ناهماهنگی را محدود می کند. سطوح بازتعریف شده CityGML پیشنهاد می کند که LoD های اصلی به چهار سطح فرعی مختلف تقسیم شوند. ریزه کاری جزئیاتی که به تدریج به این سطوح فرعی اضافه می شوند، یک دسته بندی مجزا را فراهم می کند. مجموعهای از قوانین برای سادهسازی ساختمانهای سهبعدی، مطابق با این مدلهای اصلاحشده، تنظیم شده است [ ۳۰ ]. نمونه های مصور از این قوانین در سراسر فرآیند وجود دارد. این امکان را برای روش برای جلوگیری از تناقضات در اعتبار سنجی هندسی و معنایی فراهم می کند.
ما روش شناسی را بر روی داده های ارائه شده توسط یک نهاد اداری آزمایش کردیم: “سرویس عمومی والونی” (خدمات عمومی والون-WPS). داده های هوابرد در زمستان ۲۰۱۲ به دست آمد. تراکم نقطه-ابر مرجع ۰٫۷۸ نقطه بر متر مربع است. منطقه آزمایش محدود در بخش شمالی شهر Theux، شهر اصلی یک شهرداری روستایی است. ساختمان ها خانه های تک خانواده، گاراژها و انبارها و همچنین مغازه ها و مکان های تجمع (رستوران، باشگاه های ورزشی، سوپرمارکت ها و غیره) با اشکال مختلف سقف هستند. این منطقه دارای ۴۶۴ عنصر است که توسط WPS به عنوان “ساختمان” برچسب گذاری شده اند. پیش پردازش محدود به استفاده از فیلتر حذف آماری Outlier (فیلتر SOR) بود. فیلتر میانگین فاصله هر نقطه تا هشت همسایه خود را برای هر ساختمان محاسبه کرد.۳۱ ].
شایان ذکر است که تمامی هندسه های برداری بر پایه های هندسی اولیه ساخته شده اند که در استاندارد ISO19107 تعریف شده اند. فقط داده های هوابرد LiDAR در شکل (X، Y، Z) آنها استفاده می شود. پایتون به دلیل پشتیبانی بزرگ و قوی از بسیاری از کتابخانه ها و پارادایم شی گرا (یعنی JSON با استفاده از اسکریپت های رایج پایتون راحت تر است) انتخاب ارجح بوده است. این به هیچ راه حل تجاری متکی نیست، که قابلیت استفاده و باز بودن آن را بهبود می بخشد. از آنجایی که در سطح توسعه متفاوتی کار میکند (یعنی پایتون تفسیر میشود، کامپایل نمیشود)، پایتون کندتر است، اما نگهداری از آن نیز راحتتر از C است. نقاط با استفاده از پیوندهای پایتون از کتابخانه انتزاعی دادههای مکانی (GDAL) و OpenGIS دستکاری میشوند. ویژگیهای ساده کتابخانههای پیادهسازی مرجع (OGR) برای دادههای برداری جغرافیایی.
۳٫۲٫ تقسیم بندی نقطه-ابر
ابرهای نقطه ای روشی ساده و در عین حال کارآمد برای نمایش داده های مکانی هستند. با این حال، با وجود سهولت در گرفتن ابرهای نقطه، پردازش آنها یک کار چالش برانگیز است. مشکلاتی مانند تراکم تنظیم نادرست، درهم و برهمی، انسداد، خطاهای تصادفی و سیستماتیک، ویژگیهای سطح، یا تراز نادرست، موانع اصلی دادهمحور برای انتشار گستردهتر هستند و اغلب به ساختار داده یا ویژگیهای محیطی مرتبط با ضبط مربوط میشوند. توسط F. Poux [ ۳۲ ]. ثانیاً، مشکلات مربوط به ساختار معمولاً به دلیل فقدان اتصال در مجموعههای نقطه ظاهر میشوند، که میتواند اطلاعات سطح را مبهم کند [ ۳۳]]. برای رویارویی با مشکلات فوق الذکر و به دست آوردن تخمین های صفحه قابل اعتماد، روش استخراج صفحه باید استحکام نویز را در اولویت قرار دهد. در واقع، مجموعه دادههای ALS اغلب سطوح نویز بالایی را ارائه میکنند که میتواند برای رویکردهای داده محور مشکلساز شود ( شکل ۲ را ببینید.). در این مثال از یک ابر نقطه ای پیش بینی شده در یک صفحه عمودی، دو نوع نویز نشان داده شده است: در حالی که نقاط قرمز روی سقف را می توان با عناصر مسدود شده (دودکش ها، پوشش گیاهی، کابل ها و غیره) توضیح داد، نقاط قرمز بالای سقف را توضیح داد. نتیجه دیوارهایی هستند که با یک عکس با زاویه کم گرفته شده اند. طبقه بندی معتبر/نامعتبر نشان دهنده هدف خوشه بندی است. برای جلوگیری از سریالسازی و افزودن شکنندگی به رویکرد پیشنهادی، ما از استحکام به جای افزودن یک مرحله پیشپردازش، مانند استفاده از فیلترهای SOR برای فیلتر کردن نویز از قبل، ترجیح میدهیم.
هدف ما ارائه یک روش بدون نظارت بدون تزریق دانش قبلی (خواه از داده های آموزش دیده باشد یا پارامترهای بهینه سازی). بنابراین، در ابتدا بر استخراج هواپیماهای سختگیرانه تمرکز می کند. برای ارزیابی تأثیر رویکرد تشخیص شکل بر نتایج خود، رویکرد بدون نظارت دیگری را از [ ۳۴ ] اجرا کردیم که در زمینه باستانشناسی در [ ۳۵ ] و برای ساختمانهای داخلی در [ ۳۶ ] اعمال شد. جدیدترین تعمیرات اساسی آن (Poux et al. در حال چاپ) امکان تقسیم بندی ابرهای نقطه ای کاملاً بدون نظارت را در دستگاه های سطح پایین فراهم می کند.
این روش تا میلیاردها نقطه سه بعدی را مقیاس میکند و گروهبندی سطح پایین را هدف قرار میدهد تا از هر برنامه کاربردی مستقل باشد. از یک تعریف چند سطحی و سلسله مراتبی برای مقابله با تغییرات بالقوه در تعاریف اشیاء سطح بالا استفاده می کند. بخشبندی کاملاً بدون نظارت، از طریق یک تجمع مبتنی بر نرمال، از برتری مسطح در صحنهها استفاده میکند. برای استفاده و سادگی، نویسندگان یک تعریف اکتشافی خودکار برای تعیین سه پارامتر الهام گرفته از RANSAC، یعنی آستانه فاصله برای منطقه در حال رشد، آستانه برای حداقل تعداد نقاط مورد نیاز برای تشکیل یک منطقه مسطح معتبر، و معیار تعیین کننده برای اضافه کردن امتیاز به یک منطقه استحکام روش “یک دکمه” در سناریوهای مختلف برای ساختمانهای داخلی پیچیده با پلتفرمهای حسگر زمینی مختلف (سنسورهای عمق، اسکنرهای لیزری زمینی، اسکنرهای لیزری دستی، سیستمهای نقشهبرداری موبایل) آزمایش شد، اما در مجموعههای داده ALS آزمایش نشد. . نسبت به نویز بسیار مقاوم است، چگالی نادرست تنظیم شده است، و یک گروه بندی نقطه سلسله مراتبی واضحی را ارائه می دهد، که در آن تخمین پارامترهای کاملاً نظارت نشده نتایج بهتری نسبت به پارامترهای «تعریف شده توسط کاربر» می دهد.
این فرآیند برای به دست آوردن خوشه های نقطه n انجام می شود که به پشتوانه n برای تخمین های صفحه تبدیل می شود ( شکل ۳ را ببینید ).
در این زمینه، شایان ذکر است که علاوه بر استفاده از روشی نوآورانه برای تقسیمبندی ابرهای نقطهای، بهبود هر مرحله بازسازی، دستیابی به یک مدل سازگار هندسی و توپولوژیکی را ممکن میسازد. هر مرحله در روش توسط مقادیر و آستانه های نرمال شده کنترل می شود [ ۴ ، ۵ ]. همه این پیشرفت ها آن را به یک ژنراتور خودکار متقاعد کننده تبدیل می کند.
۳٫۳٫ مدل سازی گام به گام هندسی
CityJSON ساختار هندسه ساختمان را به صورت Solid، CompositeSolid یا MultiSurface (تطابق با استاندارد ISO19107) ممکن می سازد. از آنجایی که یک ساختمان یک حجم را محدود می کند، جامد اولیه کاملاً برای ایفای این نقش در این روش در نظر گرفته شده است: مجموعه ای ساختاریافته از چند ضلعی ها که حاوی حجم بسته یک جسم صلب است. لطفاً توجه داشته باشید که CompositeSolid ممکن است یک پیشرفت برای ضمیمه های ساختمان باشد. از سوی دیگر، MultiSurface نمایانگر قطعات غیرحجمی (مثلاً برآمدگی سقف) است. هدف از فرآیند بازسازی ساختمان، تعیین چند ضلعی های مرزی و رابطه بین آنها، برای تولید یک مدل منسجم است. روش بازسازی از نقاط شروع می شود، که اطلاعاتی است که مستقیماً توسط ابر نقطه LiDAR ارائه می شود. بر اساس صفحات سقف شناسایی شده (به رنگ قرمز)، ردپا (به رنگ آبی) به عنوان طرح ریزی صفحات سقف محاسبه می شود. در نهایت، دیوارها (به رنگ زرد) با پیوند دادن هر لبه شکل سقف به لبه مربوطه آن از رد پا تعیین می شوند. اینشکل ۴ مراحل متوالی نشان داده شده را با موازی کردن بخش ها و داده های ورودی آنها تجزیه می کند.
در مقایسه با سایر رویکردهای ترکیبی [ ۲۹ ]، صفحات از طریق یک روش مبتنی بر داده شکل میگیرند، اما ساختمانها بر اساس یک نمودار اتصال ساخته میشوند. با این حال، برخی از تفاوتها را باید در نظر گرفت: (الف) ساختمانها با فرمت CityGML تولید میشوند، اما LoD تصفیهشده CityGML در فرآیند بازسازی در نظر گرفته نشد [ ۴]]؛ (ب) مراحل بازسازی از مراحل یکسانی پیروی نمی کنند: اجزای اولیه (حجم های کوچک) بر اساس نمودار توپولوژی سقف تولید می شوند، سپس به منظور تولید مدل ساختمان متصل می شوند. از نظر مدلسازی اولیهها، روشهای مبتنی بر مدل، مدلها را به ابرهای نقطهای منطبق میکنند تا معیارهایی مانند خطای میانگین مربعات ریشه (RMSE)، فاصله هاسدورف (اشکال تغییر شکلیافته)، فاصله تابع تنظیم (شباهت کل شکل)، زاویه را کاهش دهند. شاخص مبتنی بر، یا یک ترکیب [ ۳۷ ، ۳۸ ، ۳۹ ، ۴۰ ]. یک روش خاص، تولید خودکار مدل CityGML [ ۴۱ ] را پیاده سازی می کند. تمام سطوح از نظر معنایی سازگار و مستقل از فرآیند هستند ( شکل ۵ را ببینید).
لطفاً توجه داشته باشید که در CityJSON (به دلیل نیمه ساختاری بودن)، کاربران می توانند برای افزایش قابلیت استفاده در برنامه های اختصاصی مدل را به مدل اضافه و تغییر دهند. توسعههای بیشتر ممکن است به تولید عناصر دیگر محیط ساخته شده شهری (جادهها، پلها، تونلها و غیره) و افزودن ابردادههای تخصصی مربوط باشد.
۳٫۳٫۱٫ نسل توپولوژی
از زیر مجموعه های تشکیل شده از نقاط، و این، توپولوژی شکل سقف برای هر ساختمان ساخته می شود. شکل سقف بر اساس اتصالات بین ترکیبی از زیر مجموعه ها ترجمه شده است. برخی از تعمیم – و بنابراین از دست دادن دقت به دنیای واقعی – باید پذیرفته شود. باز هم، تمرکز بر انطباق با مشخصات CityGML [ ۵ ] است. بنابراین، برخی از آستانه ها باید ایجاد شوند، همانطور که در استاندارد ارائه شده است (به عنوان مثال، حداقل شیب ۵ درجه، به منظور متمایز کردن سطوح، و حداقل مساحت شش متر مربع برای ساختمان ها ) .
زیر مجموعه های مختلف نقاط بر روی یک صفحه افقی مجازی XY پیش بینی می شوند. حداقل کادر محدود گرا بر اساس مختصات نقاطی که زیر مجموعه را تشکیل می دهند محاسبه می شود. این چند ضلعی به ما ردپای فرعی جهتدار تعیین شده توسط صفحه را میدهد (یعنی پوشش جهتدار که حداقل وسعت مجموعهای از نقاط دو بعدی را تشکیل میدهد). اتصالات بین ردپای فرعی مختلف بین جفت ها در نظر گرفته می شود: اگر خط تقاطع در چند ضلعی ردپای رخ دهد، و اگر تقاطع با نمودار اتصال سازگار باشد، اتصال جدید به نمودار توپولوژی اضافه می شود.
ماهیت رابطه بر اتصال و بازنمایی فیزیکی آن (دره ها، باسن و برآمدگی ها) تأثیر می گذارد. رابطه صفحه را می توان به سه خانواده محدود و یک خانواده پیش فرض طبقه بندی کرد [ ۴۲ ]:
-
صفحات O+ دارای بردارهای نرمال هستند که در صورت پرتاب، متعامد هستند و از یکدیگر دور هستند.
-
صفحات O دارای بردارهای معمولی هستند که در صورت بازتاب متعامد و به سمت یکدیگر هستند.
-
صفحات S+ بردارهای معمولی دارند که وقتی پرتاب می شوند موازی هستند و از هم دور هستند.
-
N = بدون محدودیت.
لطفاً توجه داشته باشید که مفهوم نمودار اتصال بخشی از مدلسازی ترکیبی است [ ۳ ]: نمودار ویژگی سقف (RAG) [ ۴۳ ]، نمودار مجاورت منطقه [ ۴۴ ]، یا نمودار توپولوژی سقف [ ۴۵ ]. تفاوت اصلی با این نمودارها در مدیریت موازی سازی نهفته است: کلاس +S که در روش های دیگر وجود ندارد، اطلاعات اضافی را ارائه می دهد. برای تعیین متعامد بودن و موازی بودن، بردارهای نرمال بر روی صفحه XY پیش بینی می شوند. بر اساس آستانه ۵ درجه، زاویه بین آنها روابط را تعیین می کند [ ۵]. ما فرض میکنیم که این روش تعادل خوبی بین انعطافپذیری روشهای بازسازی و کیفیت مدلهای ساختمان بازسازیشده فراهم میکند. خانواده های مختلف در شکل ۶ نشان داده شده اند :
از آنجایی که Nخانواده هیچ اطلاعاتی ارائه نمی دهد، ذخیره نمی شود. این فرض بر اساس عدم وجود اطلاعات است. از اینجا می توان از رابطه برای تعیین اینکه این رابطه از نظر مادی شامل چه چیزی است استفاده کرد. به عنوان مثال، از یک رابطه S+، می توان بیان کرد که اسکلت سقف حداقل از یک پاره خط و دو نقطه تشکیل شده است. برعکس، روابط O یک نقطه برای اسکلت سقف فراهم می کند. این اطلاعات بیشتر در فرآیند بازسازی سقف استفاده خواهد شد. لطفاً توجه داشته باشید که یک نمودار خالی منجر به ترکیبی از سقف های مسطح یا کج می شود. شکستن نمودار همچنین می تواند به راحتی برای ساده کردن اشکال یا استخراج بخشی فرعی از یک ساختمان استفاده شود. اطلاعات اتصال در چند صفحه محاسبه می شود. در نتیجه، این اطلاعات را می توان به راحتی در دو ماتریس ذخیره کرد:
-
یک ماتریس مجاورت (i، j) ، که شامل شناسه صفحات j متصل به صفحه i است .
-
یک ماتریس رابطه، که حاوی ماهیت اتصال بین صفحات i و j است .
از نمودار اتصال، اگر دو صفحه به هم متصل شوند، ردپای حداقل، اتحاد هر دو است. این فرآیند به طور مکرر در بالای مورب بالای ماتریس مجاورت حلقه می زند و همان طور که پیش می رود ردپایی را ایجاد می کند. هنگامی که نمودار طی شد، با محاسبه بدنه مقعر عناصر مختلف، چند ضلعی تعمیم داده می شود تا یک چند ضلعی منسجم به دست آید. با توجه به اینکه ساختمان های L، U و غیره نباید بسته شوند، بدنه مقعر قابل توجه است. آستانه هایی که با مشخصات CityGML مطابقت دارند، به منظور اطمینان از سازگاری ردپا و پاک کردن خطاهای بالقوه اعمال می شوند [ ۳۰ ].
نتیجه یک ردپای پرواز (یعنی پوشش پیش بینی شده ساختمان، بدون ارتفاع) را فراهم می کند. این پاکت بخشی از جعبه مرزبندی سه بعدی ساختمان است. به لطف مدل ارتفاع دیجیتال (DEM) تولید شده از ابر نقطه هوابرد، می توان کمترین حد Z را تعیین کرد. با ابر نقطه و نتایج مثلث بندی نقاط “زمین” از طبقه بندی فرمت LASer (LAS) ارائه شده است. این مدل ارتفاعی دارای دقت ارتفاع سنج ۰٫۱۲ متر و وضوح مکانی ۱ متر است. آخرین مختصات جعبه، یعنی ارتفاع آن، به عنوان بخشی از تولید سقف محاسبه می شود.
۳٫۳٫۲٫ نسل سقف
مگر اینکه هواپیماها کاملاً موازی باشند، دو صفحه همیشه در جایی قطع می کنند. این اتصال باید در ردپا باشد، تا بخشی از اسکلت باشد. در غیر این صورت، می تواند باعث ناهماهنگی شود: خطوط پارگی نامربوط، نمایش شکل سقف را کاهش می دهد. پس از آن، تمام ترکیب خطوط در طول گراف توپولوژی محاسبه می شود. برای روابط S+ (و فقط روابط S+)، نقاط تقاطع این خطوط با ردپای نیز تعیین می شود. به عنوان مثال، این مورد برای پشته سقف های شیروانی است، همانطور که با صفحه زرد در شکل ۷ نشان داده شده است . طبق مشخصات CityGML [ ۵]، یک آستانه دو متری نقاط گسیختگی را به نقاطی که قبلاً از ردپا بیرون زده بودند میکوبد. این تلورانس snapping کامل، اعتماد به توپولوژی مدل را افزایش می دهد. از این رو، از سوراخ ها جلوگیری می کند (برای توضیح به مقدمه مراجعه کنید). نقاط گسیختگی طرح کلی سقف را تشکیل می دهند. خطوط و نقاط گسیختگی در یک ماتریس گسیختگی، مشابه ماتریس های مجاورت و رابطه، ذخیره می شوند.
در نهایت نقاط تقاطع بین خطوط گسیختگی مشخص شده و به نقاط گسیختگی اضافه می شود. ارتفاع آنها پس از آن درون یابی می شود. لطفاً توجه داشته باشید که در مواردی که هیچ تلاقی بین صفحات سقف در چند ضلعی ردپای وجود ندارد، به این معنی است که سقف مسطح یا کج به شکل است. در این مورد، مدل ساختمان را نمی توان بیشتر اصلاح کرد. فقط LoD 1.x برای این ساختمان ها تولید می شود. حتی اگر این نوع شکل قبلاً شناسایی شده باشد، فیلتر دوم برای اطمینان از شناسایی آنها اعمال می شود.
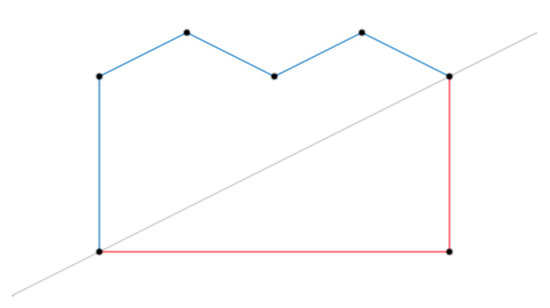
هواپیماهای سقفی در حین حرکت بخش به بخش در ردپای ساخته می شوند. برای هر نقطه، فواصل متعامد تا صفحات سقف از طریق بردارهای معمولی محاسبه می شود. از آنجایی که یک نقطه از طرح سقف بخشی از دو صفحه سقف است، دو فاصله کمتر صفحه ای را که به آن تعلق دارند مشخص می کند. پس از این، با در نظر گرفتن این نقاط و نتایج ذخیره شده در ماتریس گسیختگی، چند ضلعی غیر متقاطع برای هر صفحه سقف محاسبه می شود. این چند ضلعی از مرتب کردن دو زیر مجموعه از نقاط و رسم خطی حاصل می شود که چپ ترین و راست ترین نقطه را به هم پیوند می دهد. چند ضلعی غیر متقاطع، ترکیب نقاطی است که بالاتر از خط و آنهایی که پایین تر هستند، مرتب شده از چپ به راست و بالعکس ( شکل ۸ را ببینید.برای یک تصویر). لازم به ذکر است که بدنه مقعر مجموعه ای از نقاط تمایل به تعیین کوچکترین چندضلعی دارد که همه نقاط را به هم پیوند می دهد. این کوچکترین چند ضلعی همیشه نمایش صحیح دیوار در مواردی با زوایای بسیار تیز نیست.
برای نتیجه گیری در مورد صفحات سقف، ارتفاع نقاط با توجه به معادلات صفحه محاسبه می شود. از آنجایی که هر راس به چندین صفحه تعلق دارد، میانگین حسابی ارتفاع آن را نشان می دهد. لطفاً توجه داشته باشید که این عملیات سطح نقشه های مختلف را خراب می کند. به عنوان مثال، یک مشکل با غیر مسطح بودن می تواند منجر به مشکلاتی در هنگام محاسبه مساحت سطح شود. با این حال، این عملیات خطاها را به طور مساوی توزیع می کند. هر چه ابر نقطه ای متراکم تر و کم سر و صداتر باشد، بازسازی دقیق تر است. در نهایت، بالاترین نقطه مدل ساختمان LoD 2.x ارتفاع جعبه مرزی سه بعدی آن را نشان می دهد.
۳٫۳٫۳٫ نسل دیوار
این ماژول ساده تر از دو ماژول قبلی است، زیرا فقط نتایج را به نتایج متصل می کند. و همچنین صفحات سقف، دیوارها هنگام حرکت بخش به بخش در ردپا ایجاد می شوند. تقاطع بخش ها با صفحات سقف پیش بینی شده محاسبه می شود. رئوس تقاطع و آنهایی که از قسمت ردپای استخراج می شوند، نقاطی را نشان می دهند که دیوار را محدود می کند. یک بار دیگر، چند ضلعی غیر متقاطع تعیین می شود و رئوس مرتب شده ای را ارائه می دهد که قسمت های دیوار را ترسیم می کند.
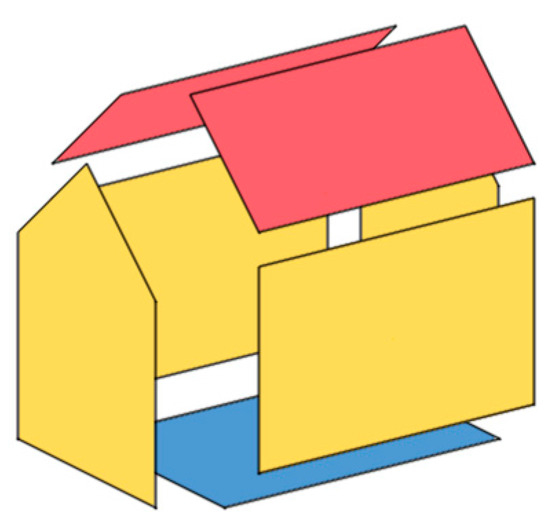
یک نکته کلی به هر سه ماژول مربوط می شود. هنگام رندر کردن بدنه سفت و سخت از طریق حذف پشت صورت، یک قانون منحصر به فرد اعمال می شود: بردار معمولی باید به سمت خارج از حجم باشد. این به ترتیب رئوس برای هر سطح ترجمه می شود. این باید در خلاف جهت عقربه های ساعت باشد و از دید بیرونی سفارش داده شود. همه چهره ها تحت این شرایط کنترل می شوند. در غیر این صورت، حجم ها بسته می شوند، اما نمایش آنها، از جمله موارد دیگر، ممکن است مشکل ساز به نظر برسد. این بستگی به بیننده و کاربرد دارد ( شکل ۹ را برای یک تصویر ببینید).
۳٫۳٫۴٫ مونتاژ ساختمان
یک ساختمان شامل یک جامد است که یک حجم بسته را محدود می کند. باز هم، ماهیت سطوح از شیب، جهت یا موقعیت آنها استنباط نمی شود، بلکه از طریق این فرآیند استنباط می شود: ردپا همیشه اولین عنصر تولید شده است، سپس صفحات سقف و دیوارها هندسه سه بعدی را می بندند (به شکل ۱۰ مراجعه کنید . ترتیب ساخت: قرمز، سپس آبی، سپس زرد). سه احتمال ( سطح زمین ، سطح دیوار، یا سطح سقف ) فهرست شده و در یک آرایه نگاشت شده اند که با ترتیب سطوح مختلف مطابقت دارد. این اطلاعات در اشیاء JSON به عنوان semantics ذخیره می شودکلید JSON در هر شی ساختمان. چند ضلعی هایی که سطوح مختلف را تعریف می کنند به عنوان آرایه های مرتب شده از شناسه های رئوس ذخیره می شوند. آنها مرزهای شی JSON را تشکیل می دهند.
CityJSON به اشیاء اجازه می دهد تا در LoD همزمان نمایش داده شوند. از آنجایی که همه برنامه ها نیاز به سطح دقیق طراحی ندارند، سه LoD تولید می شوند. آنها مراحلی از رد پا تا هندسه های شکل سقف را نشان می دهند ( شکل ۱۰ را برای یک تصویر ببینید). سطوح فرعی (LoD 0.x و LoD 1.x) نیازی به پردازش اضافی ندارند: ردپا و جعبه مرزی قبلاً تعیین شده است. آنها به ترتیب به عنوان سطح ۰٫۱ و ۱٫۱ ساختمان [ ۴۶ ] ذخیره می شوند. لطفاً توجه داشته باشید که چندین روش برای تعیین ارتفاع جامد اکسترود شده وجود دارد: حداقل، حداکثر، میانگین و میانه. با این حال، در این مورد، به نظر می رسد استفاده از حداکثر ارتفاع محافظه کارانه ترین رویکرد برای تعریف حجم باشد.
۳٫۴٫ ساختمان مدل CityJSON
مدل CityJSON بر اساس این فرآیند به صورت تکراری ایجاد می شود. مشخصات نیاز به وجود کلیدهای JSON در هر فایل دارند: نوع ، نسخه ، CityObjects و رئوس . اگرچه نوع و نسخه به راحتی ایجاد می شوند، CityObjects و vertices نیاز به توضیح دارند. CityObjects نشان دهنده الحاق تمام اشیاء ساختمانی ایجاد شده در بخش قبل است، با مرزهای خود ، معنایی و غیره. در کنار این، مختصات رئوس است .به صورت عمده در انتهای فایل مدل شهر ذخیره می شوند. آنها به ترتیب شناسه هایشان (یعنی ایجاد متوالی آنها) ذخیره می شوند. این روش امکان کاهش اندازه مدل و اجتناب از اطلاعات اضافی را فراهم می کند، حتی اگر این افزونگی همچنان در مشخصات CityJSON مجاز باشد. با این وجود، این یک شرط اضافی و ضروری برای ساخت یک مدل شهری فشرده است. علاوه بر این، کلید JSON تبدیل اختیاری اجازه میدهد تا مختصات رئوس را از حالت فشرده خارج کنند تا فشردگی مدل بهبود یابد، همانطور که قبلاً در TopoJSON انجام شده است.
عنصر مهم دیگر مربوط به ابرداده است. با توجه به اهمیت و تأثیر حمایت آنها، این عنصر در بخش بعدی به طور گسترده مورد بحث قرار خواهد گرفت.
نمونه ای از یک مدل تولید شده توسط CityJSON در شکل ۱۱ نشان داده شده است . ابر نقطه و بازسازی یکی پس از دیگری در نمایشگر CloudCompare، در بیننده منبع باز توسعه یافته در گروه ۳D GeoInformation از TUDelft ( https://github.com/tudelft3d/CityJSON-viewer/ ) و یک نمایشگر باز نمایش داده می شوند. پسوند منبع سزیم ( https://github.com/limyyj/cesium-cityjson ). یک نگاه سریع نشان می دهد که اشکال هرمی و پیچیده تر در داخل داده ها نشان داده می شوند، حتی اگر اشکال سقف شیروانی اکثریت را نشان دهند.
۴٫ بحث
این بخش مزایای تولید مستقیم مدلهای CityJSON را مورد بحث قرار میدهد و کیفیت نتایج را با استفاده از چندین ابزار عادی و رسمی ارزیابی میکند. بخش اول این بخش سهم پژوهشی این مقاله را توسعه میدهد، سپس بخش دوم این امکان را به وجود میآورد که در مورد اعتبار بازسازی هندسی در مقایسه با رویکرد مدرن حکم کنیم. ابتدا، انطباق با مشخصات CityGML/CityJSON ارزیابی میشود. اعتبار هندسی هر ساختمان نیز بررسی می شود.
۴٫۱٫ بهبود CityJSON
از منظر مفهومی، CityGML و CityJSON تفاوتی ندارند. در سطح جهانی، ساخت یک مدل می تواند به صورت موازی برای هر دو فرمت انجام شود. هندسه ای شامل لبه ها و رئوس را می توان در CityGML یا CityJSON بدون از دست دادن یا عدم دقت قالب بندی کرد. در نتیجه، ترجمه بین هر دو مشکلی نیست، اما نگاشت مستقیم یک به یک نیست. حتی اگر طرحواره مفهومی یکسانی داشته باشند، چندین تفاوت قابل توجه در مؤلفه های توصیفی آنها وجود دارد. به عنوان مثال، CityJSON مدیریت دو عنصر اضافی را به ویژه امکان پذیر می کند: (الف) توانایی مدیریت فراداده به صورت بومی [ ۶ ] و (ب) LoD تصفیه شده [ ۴]]. با ارائه روشی که بازسازی هندسی را تجزیه می کند و کار بر روی بهبود هر بخش تشکیل دهنده، هر دو نقطه (a) و (b) را در طول فرآیند مدیریت می کنیم.
CityJSON توانایی مدیریت فراداده را به صورت بومی ارائه می دهد. برعکس، CityGML به استفاده از یک افزونه برای مدیریت ابرداده نیاز دارد [ ۶ ]. به همین دلیل، ترجمه از CityGML به CityJSON و بالعکس، بدون از دست دادن اطلاعات امکان پذیر نیست. با مثالی از مترجم خط فرمان از CityGML به CityJSON، اطلاعات اگر بخشی از قالب مقصد نباشد به سادگی نادیده گرفته می شود. پیشنهاد یک روش تولید که به طور مستقیم یک مدل CityJSON را ارائه می دهد به این مشکل پاسخ می دهد. جلوگیری از چنین ضرری را ممکن می سازد.
از یک طرف، تعاریف سطح از جزئیات تصفیه شده، و معیارهای مربوط به آنها، مدیریت می شوند. در طول فرآیند تولید، آستانه ها ارائه می شود و ما تطابق با مشخصات را تضمین می کنیم. در این مورد، ما موفق شدیم ۰٫۱، ۱٫۱، و ۲٫۱ LoD را به طور همزمان ایجاد کنیم [ ۴ ]. یک مزیت مرتبط این است که می توانیم همه سطوح را به طور همزمان ذخیره کنیم. علاوه بر این، این سطوح به یکدیگر وابسته هستند، زیرا ردپای – ۰٫۱ LoD واقعی – زیرزمین LoD های ۱٫۱ و ۲٫۱ است. این تعاریف بهبودیافته اطلاعات مهمی در مورد ضریب فرم ساختمان ارائه میکند که در LoDهای رایج مجاز نیست. LoD های تصفیه شده نه تنها قطعات ساختمانی منفرد و بزرگ را نشان می دهند، بلکه قطعات کوچک ساختمان، فرورفتگی ها و پسوندها را نیز نشان می دهند. شکل ۱۲مقایسه ای بین LoD های رایج که حداقل مشخصات را ارائه می دهند و LoD های تصفیه شده که درک بهتری از جزئیات را ارائه می دهند را به تصویر می کشد. بنابراین، به برنامهها اجازه میدهد تا سطح مرتبطتری را برای دامنه مورد علاقه خود انتخاب کنند. از دیدگاه کاربر، به عنوان مثال، شبیه سازی جریان سیال، این سطح از جزئیات در ساختمان تاثیر مهمی دارد [ ۲۴ ].
از نظر اطلاعات متنی، امکان محاسبه و مدیریت ابرداده در طول فرآیند وجود دارد. از جمله موارد دیگر، CityJSON امکان مدیریت گستره جغرافیایی شهر را فراهم می کند. علاوه بر هندسه یک ساختمان، وسعت جغرافیایی آن به طور همزمان محاسبه می شود (یعنی حداقل مکعب گرا و مرزدار). انتخاب این است که حداکثر ارتفاع ساختمان در نظر گرفته شود تا در سمت امن باشد و تأثیر عناصر بر محیط ساخته شده خود را دست کم نگیرد. در نهایت، وسعت ساختمان ها را می توان برای تعیین گستره جغرافیایی کل مدل شهر جمع کرد. سپس این وسعت در فراداده مدل ذخیره می شود، که به صورت داخلی در CityGML موجود نیست ( شکل ۱۳ را ببینید.). علاوه بر این، عدم پشتیبانی CityGML ISO19115 هنگام تبادل اطلاعات، مقایسه مدلهای همزمان برای همان عنصر یا حفظ سابقه نسخهسازی مدل مضر است. به عنوان یادآوری، فرضیه شروع ارائه یک مدل فشرده است که امکان تبادل آنلاین آسان را فراهم می کند. به لطف CityJSON و این روش دیگر امکان ابهام وجود ندارد.
۴٫۲٫ سازگاری با فرمت
مشخصات CityJSON زیر مجموعه ای از مدل داده CityGML را ارائه می دهد [ ۷ ]. JSON، برخلاف XML، این مزیت را دارد که از تگ های پایانی استفاده نمی کند، که باعث کاهش افزونگی فرمت می شود. در هنگام مدیریت آرایه ها نیازی به تکرار اطلاعات برای هر عنصر نیست. با این حال، هر دو شباهتهای زیادی دارند، که آنها را به قالبهای اصلی برای تبادل دادههای آنلاین تبدیل میکند: (i) آنها هر دو خود توصیف هستند، (ii) سلسله مراتبی، و (iii) در درخواستهای HTTP واکشی میشوند. سلسله مراتب JSON به صورت جفت های کلید-مقدار تو در تو (به عنوان مثال، یک نقشه) ساختار یافته است، در حالی که XML به صورت درختی ساخته شده است. این دلیل اصلی است که درختان برای تجزیه خسته کننده و وقت گیر هستند. به طور خلاصه، XML برای ذخیره اطلاعات بهتر است – به لطف فضاهای نام – و JSON به دلیل فشرده بودن آن برای ارائه داده بهتر است.
بنابراین، از نقطه نظر قالب، برای مدل تولید شده مهم است که با طرحوارههای رسمی CityJSON مطابقت داشته باشد. برای اطمینان از این انطباق، یک رابط خط فرمان (CLI) ارائه شده توسط TUDelft اعتبارسنجی و تبدیل فایلهای CityJSON ( https://github.com/cityjson/cjio ) را ممکن میسازد. هیچ خطایی از طریق آزمایشهای مختلف ما با CLI (شاخصهای راس منسجم، مشخصات CityGroups، آرایههای معنایی منسجم با هندسه، ویژگیهای ریشه، هندسههای خالی، رئوس تکراری، رئوس یتیم، ویژگیهای CityGML) شناسایی نشده است. این به راحتی به شرح زیر توضیح داده می شود: هر ناسازگاری فردی در نرم افزار ما در بالادست مدیریت می شود.
۴٫۳٫ کنترل کیفیت
هر رأس منفرد می تواند منجر به تکینگی های محلی در سازگاری توپولوژیکی در طول فرآیند بازسازی شود. دو فرآیند فرعی از وقوع این امر جلوگیری میکنند و از بسته بودن ساختمانها اطمینان میدهند: تعمیم رئوس و تحمل شکست کامل [ ۵ ]. هر دو روش با مشخصات هندسی LoD های تصفیه شده در CityGML [ ۴] که بیان می کند قسمت های ساختمانی که عرض آنها کوچکتر از دو متر مربع است باید تعمیم داده شود و دو رأس با فاصله کمتر از دو متر در صفحه XY یک راس در نظر گرفته می شوند. لطفاً توجه داشته باشید که تعمیم در طول ایجاد ردپا اتفاق میافتد، زمانی که راسها هنوز وجود ندارند، اما گیرکردن بعداً در هنگام ایجاد دیوار، سقف و ردپای اتفاق میافتد، زمانی که راسها وجود دارند.
۴٫۳٫۱٫ ارزشیابی فضایی- معنایی
اعتبار معنایی بسیار مهم است: فضای کمی برای عدم قطعیت معنایی باقی مانده است. باز هم، ماهیت سطوح از جهت گیری معمولی یا موقعیت های نسبی استنباط نمی شود، اما در طول فرآیند: ردپا همیشه اولین عنصر تولید شده است. صفحات سقف از نمودار اتصال آنها تولید می شود و در نهایت صفحات دیوار ایجاد می شود. بنابراین به راحتی می توان اعتبار مکانی- معنایی را به دست آورد.
با توجه به اینکه CityGML به استاندارد واقعی برای مدلسازی شهر فضایی- معنایی تبدیل شده است، فعالیت مشترک آزمایشهای تعاملی بین OGC، SIG3D و EuroSDR برخی الزامات را برای عادیسازی استفاده از آن تعریف کرد. گروه OGC IEJA تحقیقاتی را انجام می دهد و ابزارهایی را برای انجام تضمین کیفیت بر روی داده ها، از جمله داده های مورد استفاده در این تحقیق، فراهم می کند. بحث های آنها در مورد مسائل مربوط به کیفیت داده های CityGML منجر به دستورالعمل های استفاده شده است [ ۲۸ ]: (۱) تعریف کیفیت داده، (۲) الزامات کیفیت داده و مشخصات آنها، (iii) یک فرآیند بررسی کیفیت برای داده های CityGML، و (IV) شرحی از نتایج اعتبار سنجی.
۴٫۳٫۲٫ ارزیابی هندسی
ایده اصلی این است که اعتبارسنجی را با آبشار کردن آن ساده کنیم: قبل از اینکه به مرحله بعدی برویم، باید مراحل قبلی را تأیید کنیم. بنابراین، اگر یک ناسازگاری هندسی بحرانی شناسایی شده باشد، هیچ اعتبار معنایی نباید انجام شود [ ۴۷ ]. اخیراً، ابزارهای جدید مدیریت LoD گسسته تر را پیشنهاد می کنند: ابزارهای قبلی در سطوح نزدیک به LoD1.x (سقف های مسطح و دیوارهای عمودی) محدود بودند. یک طبقه بندی خطای استاندارد برای کمک به ساختار ارزیابی ضروری است. از ویژگی های ذاتی مدل ها، خطاها را می توان با استفاده از طبقه بندی کننده نظارت شده (به عنوان مثال، جنگل تصادفی) شناسایی کرد [ ۴۸ ، ۴۹ ]. با این حال، این از CityJSON پشتیبانی نمی کند. روش ما با ابزار همه کاره val3dity [ ۵۰] تایید شد]. هندسه های پیچیده به طور سیستماتیک به بخش های تشکیل دهنده خود تقسیم می شوند: یکپارچگی ساختمان ها پردازش می شود، سپس هر سه بعدی اولیه تایید می شود. در اینجا، شایان ذکر است که همپوشانی – همانطور که در val3dity اجرا می شود – روابط بین BuildingParts را در نظر می گیرد نه بین ساختمان ها و یکدیگر. این یک نکته مهم در رابطه با زمان محاسبه است، زیرا همپوشانی روند را بسیار کند می کند: از مجموع Minkowski برای ارزیابی همپوشانی ها استفاده می شود. دارای پیچیدگی زمان اجرا O(n ۳ m ۳ ) است که n تعداد اشیا و m تعداد اجزای تشکیل دهنده آنها است [ ۵۱]. همانطور که در مورد CityGML وجود دارد، فقط موارد اولیه مسطح و خطی مجاز هستند: استوانهها، کرهها یا دیگر منحنیهای مدلسازی شده پارامتریک پشتیبانی نمیشوند. پارامترهای اعتبارسنجی در ابزار val3dity به شرح زیر است [ ۵۰ ]:
-
تحمل ضربه: ۰٫۰۰۱ متر – اگر دو نقطه از این مقدار نزدیکتر باشند، آنها یکسان فرض می شوند.
-
تحمل مسطح: ۰٫۰۵ متر – حداکثر فاصله بین یک نقطه و یک صفحه نصب شده.
-
تحمل همپوشانی: ۰٫۰۱ متر – تلورانس مورد استفاده برای اعتبارسنجی مجاورت بین جامدات مختلف.
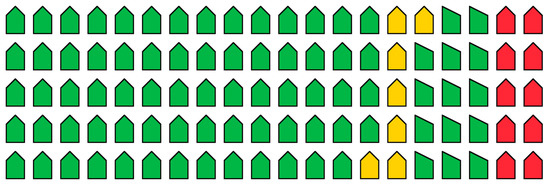
شکل ۱۴ یک نمای کلی گرافیکی از نتایج برای شهر Theux در بلژیک ارائه می دهد. لطفاً توجه داشته باشید که خود تعریف « ساختمان » ممکن است بین استانداردها و برنامههای کاربردی متفاوت باشد، به خصوص برای ابرهای نقطه LiDAR، زیرا در ابتدا مطابق با تعاریف CityGML در نظر گرفته نشدهاند. از این رو، برخی از عناصر به تعریف CityGML تعلق ندارند. برای بقیه، رد پای یک عنصر ساختمانی باید بیشتر از شش متر مربع باشد. ساختمان های قرمز رنگ در شکل ۱۴ این عناصر را در ۱۰۰ ساختمان نشان می دهد. این نسبت نشان دهنده ۴۴ ساختمان از مجموعه کامل (۴۶۴ عنصر) است. از سوی دیگر، ۶۵ ساختمان به عنوان بام های مسطح یا کج طبقه بندی می شوند (ساختمان های سبز در سمت راست شکل ۱۴).). بنابراین آنها در معیار بازسازی LoD2.x گنجانده نشده اند. در نهایت، ساختمان هایی که با اشکال پیچیده سقف مطابقت دارند اعتبارسنجی می شوند. در پایان، ۳۱ ساختمان از ۳۵۵ ساختمان باقیمانده (ساختمان های زرد در شکل ۱۴ ) اعتبارسنجی نشده اند. این مربوط به اعتبار ۹۱٫۲۶٪ برای اشیاء LoD2.x است، به عنوان مثال، بیشتر مجموعه داده معتبر است. ساختمانهایی که در LoD2.x قابل بازسازی نیستند ، بهعنوان LoD0.x و LoD1.x (حجمهای ردپای و اکسترود شده) تولید میشوند.
نتایج ارائه شده توسط روش ما با مجموعه داده های باز مقایسه شده است ( جدول ۱ را ببینید ) [ ۵۰ ]. به طور کلی، روش پیشنهادی نسبت هندسههای معتبر/نامعتبر بیش از ۹۰ درصد را ارائه میکند. لطفاً توجه داشته باشید که سایر دادههای معیار مربوط به فایلهای CityGML هستند. هیچ اطلاعات دیگری در مورد منبع و/یا ایجاد داده ها داده نشده است. اعتبار فزاینده از ساختمان ها به اولیه ها با این واقعیت توضیح داده می شود که LoD های پایین تر تولید می شوند.
تفاوت در اعداد ساختمان بین RANSAC بدون نظارت (UR) و منطقه در حال رشد (RG) ناشی از پیش پردازش (حذف نقاط پرت آماری، خوشه بندی، و غیره) است. در واقع، خوشه نقطه همیشه الزاماتی را برآورده نمی کند که به عنوان ساختمان در نظر گرفته شوند.طبق مشخصات CityGML. در اینجا، این فرض که تقسیم بندی موثر است، محدودیت های آن را نشان می دهد: اگر هواپیماها شناسایی نشوند، یا بیش از حد همپوشانی داشته باشند، نمودار اتصال درست نخواهد بود. روش پیشنهادی تا حدی بر این فرضیه محدود کننده تکیه می کند که تقسیم بندی به درستی صفحات را تشخیص می دهد. هنگام تجزیه و تحلیل نتایج، منبع اصلی خطاها در حال حاضر از روش های تقسیم بندی و چگالی نقطه پایین ناشی می شود. ابزار val3dity یک طبقه بندی از خطاهایی را ارائه می دهد که در طی یک ارزیابی هندسی می توان با آنها مواجه شد [ ۵۰ ]. در مراحل توسعه متوالی، تنها یک زیر مجموعه تکراری از این خطاها شناسایی شد – فاصله چند ضلعی غیرمسطح – زیرا الگوریتم قبلاً از بسیاری از آنها جلوگیری می کند.
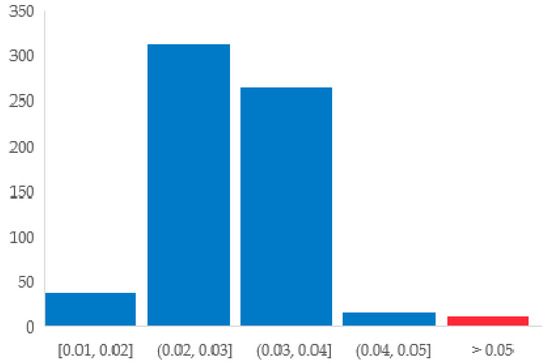
با این وجود، توزیع این خطاها فقط کمی از آستانه نظری ۵ سانتی متر انحراف دارد. فقط تعداد کمی از آنها برجسته هستند. همچنین ذکر این نکته ضروری است که الگوریتم های درون یابی سطحی بین val3dity (کمترین میانگین مربعات) و روش (RANSAC) [ ۱۹ ] متفاوت است. برای ارزیابی کیفیت درونیابی صفحه، RMSE هر صفحه سقف برای محور Z محاسبه می شود ( شکل ۱۵ را برای کلاس های خطا ببینید). همانطور که مشاهده می شود، توزیع خطاها نزدیک به ۳ سانتی متر است (میانگین: ۰٫۰۲۸ متر، صدک ۹۵ : ۰٫۰۳۹ متر). تنها ۸ هواپیما از ۶۴۴ هواپیما دارای RMSE بزرگتر از ۵ سانتی متر هستند (اینها در واقع نقاط پرت بزرگتر از ۲ متر هستند).
با این حال، باید به یک نکته منفی توجه کرد: حتی اگر تعداد ساختمان ها بر زمان پردازش به صورت خطی تأثیر بگذارد، RANSAC هنوز منبع اصلی پیچیدگی زمانی است. با در نظر گرفتن این در نظر گرفتن، دو ویژگی بر زمان پردازش تأثیر میگذارند: نسبت امتیازات در زیر مجموعه و تعداد کل نقاط [ ۵۲ ]. بنابراین فیلتر کردن ابر نقطه الزامی است. ما فیلتر کردن را در مقابل فیلتر نکردن داده های ارائه شده آزمایش کردیم. استفاده از فیلتر SOR با بهبود ۳۰ درصدی زمان محاسبه مطابقت دارد. یکی دیگر از پیشرفتهای روش ما، استفاده از شاخص درخت kd، به جای octree، برای شناسایی همسایگان نقطه است. این به منظور کاهش تعداد صفحات جعلی در طول قطعه بندی انجام شد [ ۱۹ ].
ساختمان ها همیشه از یک حجم تشکیل نمی شوند: برخی دارای ضمیمه ها و ساختمان های جانبی هستند. در نظر گرفتن این بخشهای اضافی در بازسازی میتواند کاربرد مدلها را تا حد زیادی افزایش دهد. به ویژه، این می تواند مدیریت زمین و کاربردهای کاداستر را بهبود بخشد. با در نظر گرفتن این موضوع، یک توسعه جالب دیگر می تواند از یک ساختار CompositeSolid (یعنی تجمع یک یا چند جامد – مجموعه ای غیر خالی از جامدات ) استفاده کند. توجه ویژه ای باید به توپولوژی جامدات معطوف شود . مدیریت مستقل طبقات نیز می تواند در راستای این مدیریت جدید قطعات در نظر گرفته شود.
در حال حاضر، اگر یک هندسه LoD2.x ناسازگار در نظر گرفته شود، تولید به سطوح پایین تر محدود می شود. می تواند جالب باشد که حفره های بالقوه شناسایی شده را پر کنید، نه اینکه هندسه را خراب تلقی کنید. به عنوان مثال، میتوان از یک فرآیند از بالا به پایین، انقباض کردن برای مشبندی مجدد سطوح چند ضلعی استفاده کرد [ ۵۳ ]، یا این صفحات گمشده را مستقیماً در نمودار اتصال [ ۴۳ ] بازسازی کرد. از آنجایی که این امکان تعمیر خطاهای رایج و پر کردن سوراخها (پنجرهها و درها) را فراهم میکند، یکپارچگی اشیاء LoD 2.x رعایت میشود، اگرچه این پاکت ممکن است جزئیات هندسی را صاف کند.
۵٫ نتیجه گیری ها
هدف این مقاله پاسخگویی به عدم در دسترس بودن و تطبیق پذیری مدل های سه بعدی شهر، با ارائه روشی ساده برای تولید ساختمان های شهری است. علاوه بر این، به لطف استفاده از CityJSON و تجزیه روشهای بازسازی، ادغام ابرداده و LoD تصفیهشده اکنون در فرآیند تولید پشتیبانی میشوند. روش ارائه شده بر راه حل های تجاری یا اختصاصی متکی نیست. ما معتقدیم که باز کردن روش نسل مستقیم ما به انتشار استفاده از CityJSON کمک خواهد کرد. همچنین کارهای مرتبط بیشتر را در زمینه محیط ساخته شده شهری تسهیل خواهد کرد. ارزیابی و مقایسه که بر اساس میزان اعتبار هندسه های تولید شده (قالب، اعتبار معنایی و توپولوژیک) است، نشان داد که امکان بازسازی خودکار LoD2 وجود دارد.
از نظر قالب و اعتبار معنایی خطایی مشاهده نشده است. مدل های شهری ارائه شده از هر نظر با مشخصات استاندارد مطابقت دارند. دو روش برای تشخیص هواپیما مورد آزمایش قرار گرفت: یک RANSAC بدون نظارت و یک الگوریتم RG مبتنی بر بردار معمولی کاملاً بدون نظارت. اگرچه روش RANSAC به حداقل تنظیم برای فراپارامترهای خود نیاز داشت، روش دوم خوشههای ایدهآل را بدون پارامترهای ورودی تعیین کرد. یک نتیجه جانبی مهم این کار استفاده از تقسیم بندی نقطه-ابر داخلی در یک زمینه بیرونی است. از آنجایی که به هندسه مربوط می شود، به لطف ابزارهای رسمی مانند CJIO و val3dity، کیفیت بر اساس نرمال ارزیابی می شود. نسبت ساختمانهای معتبر/نامعتبر بسته به روش تقسیم بندی بین ۹۲ تا ۹۷ درصد متغیر است. چندین پیشرفت در نظر گرفته شده است،
مشارکت های نویسنده
مفهوم سازی، ژیل-آنتوان نیس; روش شناسی، ژیل-آنتوان نیس و فلورنت پوکس. نرم افزار، Gilles-Antoine Nys; اعتبار سنجی، ژیل-آنتوان نیس; تحلیل رسمی، Gilles-Antoine Nys; تحقیق، ژیل-آنتوان نیس; منابع، Gilles-Antoine Nys و Florent Poux; سرپرستی داده ها، ژیل-آنتوان نیس; نوشتن – آماده سازی پیش نویس اصلی، ژیل-آنتوان نیس; نوشتن-بررسی و ویرایش، ژیل-آنتوان نیس، فلورنت پوکس و رولان بیلن. تجسم، Gilles-Antoine Nys; نظارت، رولاند بیلن. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این تحقیق هیچ بودجه خارجی دریافت نکرد.
قدردانی ها
ما در دسترس بودن مجموعه دادهها را از منابع زیر تأیید میکنیم: Service Public de Wallonie (خدمات عمومی والون).
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- بیلن، آر. Cutting-Decelle, A.-F.; مارینا، او. د آلمیدا، ج.-پی. کالیونی، ام. فالکت، جی. لدوچ، تی. مترال، سی. مورو، جی. پرت، جی. و همکاران (ویرایش) مدلهای سهبعدی شهر و اطلاعات شهری: مسائل و دیدگاههای کنونی: اقدام اروپایی هزینه TU0801 ; EDP Sciences: Liège, Belgium, 2014; صص ۱-۱۱۸٫ [ Google Scholar ]
- گروگر، جی. Plümer, L. CityGML—مدل های شهری سه بعدی معنایی قابل تعامل. ISPRS J. Photogramm. Remote Sens. ۲۰۱۲ ، ۷۱ ، ۱۲-۳۳٫ [ Google Scholar ] [ CrossRef ]
- وانگ، آر. پیتامباران، جی. Chen, D. LiDAR نقطه ابرها به مدل های شهری سه بعدی: یک بررسی. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. ۲۰۱۸ , ۱۱ , ۶۰۶–۶۲۷٫ [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. مشخصات LOD بهبود یافته برای مدل های ساختمان سه بعدی. محاسبه کنید. محیط زیست سیستم شهری ۲۰۱۶ ، ۵۹ ، ۲۵-۳۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بیلجکی، اف. لدوکس، اچ. دو، X. استوتر، جی. به زودی، KH; Khoo, VHS رایج ترین خطاهای هندسی و معنایی در مجموعه داده های CityGML. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۶ ، ۴ ، ۱۳-۲۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لابتسکی، آ. کومار، ک. لدوکس، اچ. Stoter, J. ADE ابرداده برای CityGML. Geospat را باز کنید. نرم افزار داده ایستادن. ۲۰۱۸ ، ۳ ، ۱۶٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لدوکس، اچ. اوهوری، کالیفرنیا؛ کومار، ک. دوکای، بی. لابتسکی، آ. Vitalis, S. CityJSON: یک رمزگذاری فشرده و آسان برای استفاده از مدل داده CityGML. Geospat را باز کنید. نرم افزار داده ایستادن. ۲۰۱۹ ، ۴ ، ۴٫ [ Google Scholar ] [ CrossRef ]
- ترشا کردی، ف. Awrangjeb, M. ارزیابی خودکار و بهبود بخشهای سقف برای مدلسازی جزئیات گمشده با استفاده از دادههای لیدار. بین المللی J. Remote Sens. ۲۰۲۰ , ۴۱ , ۴۷۰۲–۴۷۲۵٫ [ Google Scholar ] [ CrossRef ]
- پوکس، اف. هالوت، پی. نوویل، آر. Billen, R. Smart Point Cloud: Definition and Remaining Challenges. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۶ ، ۴ ، ۱۱۹-۱۲۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لافارژ، اف. مالت، سی. ایجاد مدلهای شهر در مقیاس بزرگ از ابرهای نقطهای سه بعدی: رویکردی قوی با بازنمایی ترکیبی. بین المللی جی. کامپیوتر. Vis. ۲۰۱۲ ، ۹۹ ، ۶۹-۸۵٫ [ Google Scholar ] [ CrossRef ]
- یونگ، جی. Sohn, G. اصلاح پیشرونده مبتنی بر خط مدلهای سهبعدی پشت بام با استفاده از دادههای هوابرد LiDAR با تصاویر تکنما. ISPRS J. Photogramm. Remote Sens. ۲۰۱۹ , ۱۴۹ , ۱۵۷–۱۷۵٫ [ Google Scholar ] [ CrossRef ]
- ژو، ک. لیندنبرگ، آر. گورته، بی. زلاتانوا، S. تطابق متراکم با هدایت لیدار برای تشخیص تغییرات و بهروزرسانی ساختمانها در دادههای LiDAR هوابرد. ISPRS J. Photogramm. Remote Sens. ۲۰۲۰ , ۱۶۲ , ۲۰۰–۲۱۳٫ [ Google Scholar ] [ CrossRef ]
- کائو، آر. ژانگ، ی. لیو، ایکس. Zhao, Z. بازسازی سقف ساختمان سه بعدی از ابرهای نقطه ای LiDAR در هوا: چارچوبی مبتنی بر پایگاه داده فضایی. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۷ ، ۳۱ ، ۱۳۵۹–۱۳۸۰٫ [ Google Scholar ] [ CrossRef ]
- اشنابل، آر. وال، آر. Klein, R. RANSAC کارآمد برای تشخیص شکل نقطه-ابر. محاسبه کنید. نمودار انجمن ۲۰۰۷ ، ۲۶ ، ۲۱۴-۲۲۶٫ [ Google Scholar ] [ CrossRef ]
- بالارد، DH تعمیم تبدیل Hough برای تشخیص اشکال دلخواه. در Readings in Computer Vision ; الزویر: آکسفورد، انگلستان، ۱۹۸۷; صص ۷۱۴-۷۲۵٫ شابک ۹۷۸-۰-۰۸-۰۵۱۵۸۱-۶٫ [ Google Scholar ]
- بورمان، دی. السبرگ، جی. لینگمن، ک. Nüchter, A. یک ساختار داده برای تبدیل سه بعدی هاف برای تشخیص هواپیما. IFAC Proc. جلد ۲۰۱۰ ، ۴۳ ، ۴۹-۵۴٫ [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. ژانگ، ی. لینگ، ایکس. وان، ی. لیو، ال. Li، Q. TopoLAP: بازیابی توپولوژی برای بازسازی ساختمان با استنتاج روابط بین اولیه های خطی و مسطح. Remote Sens. ۲۰۱۹ ، ۱۱ ، ۱۳۷۲٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ترشا کردی، ف. لندز، تی. Grussenmeyer, P. Hough-Transform and Extended RANSAC algorithms for Automatic Detection of Building Roof Planes from Lidar Data. در مجموعه مقالات کارگاه ISPRS در مورد اسکن لیزری ۲۰۰۷ و SilviLaser 2007، اسپو، فنلاند، ۱۲-۱۴ سپتامبر ۲۰۰۷٫ ص ۴۰۷-۴۱۲٫ [ Google Scholar ]
- لی، ال. یانگ، اف. زو، اچ. لی، دی. لی، ی. Tang, L. یک RANSAC بهبود یافته برای تقسیم بندی صفحه ابر نقطه ای سه بعدی بر اساس سلول های تبدیل توزیع عادی. Remote Sens. ۲۰۱۷ , ۹ , ۴۳۳٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، بی. جیانگ، دبلیو. شان، جی. ژانگ، جی. Li, L. بررسی روی رویکردهای وزنی RANSAC برای تقسیم بندی صفحه سقف ساختمان از ابرهای نقطه ای LiDAR. Remote Sens. ۲۰۱۵ ، ۸ ، ۵٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Pârvu، IM; رموندینو، اف. Ozdemir، E. LoD2 Building Generation Experiences and Comparisons. J. Appl. مهندس علمی ۲۰۱۸ ، ۸ ، ۵۹-۶۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- روتنشتاینر، اف. سون، جی. گرکه، ام. Wegner، JD; Breitkopf، U. Jung, J. نتایج معیار ISPRS در تشخیص اشیاء شهری و بازسازی ساختمان سه بعدی. ISPRS J. Photogramm. Remote Sens. ۲۰۱۴ ، ۹۳ ، ۲۵۶-۲۷۱٫ [ Google Scholar ] [ CrossRef ]
- اورنجیب، م. گیلانی، س. صدیقی، اف. یک روش موثر مبتنی بر داده برای بازسازی سقف ساختمان سه بعدی و تشخیص تغییر قوی. Remote Sens. ۲۰۱۸ , ۱۰ , ۱۵۱۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کومار، ک. لدوکس، اچ. استوتر، جی. تجسم سه بعدی پویا از سیل: مورد هلند. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۸ ، ۴۲ ، ۸۳-۸۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کومار، ک. لابتسکی، آ. اوهوری، کالیفرنیا؛ لدوکس، اچ. Stoter, J. استاندارد LandInfra و نقش آن در حل باتلاق BIM-GIS. Geospat را باز کنید. نرم افزار داده ایستادن. ۲۰۱۹ ، ۴ ، ۵٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ویتالیس، اس. اوهوری، ک. Stoter، J. ترکیب نمایش توپولوژیکی در مدل های سه بعدی شهر. ISPRS Int. J. Geo-Inf. ۲۰۱۹ ، ۸ ، ۳۴۷٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- هوانگ، اچ. برنر، سی. Sester, M. یک رویکرد آماری مولد برای بازسازی خودکار سقف ساختمان سه بعدی از داده های اسکن لیزری. ISPRS J. Photogramm. Remote Sens. ۲۰۱۳ ، ۷۹ ، ۲۹-۴۳٫ [ Google Scholar ] [ CrossRef ]
- واگنر، دی. Ledoux, H. CityGML Quality Interoperability Experiment ; OGC: Wayland، MA، ایالات متحده آمریکا، ۲۰۱۶٫ [ Google Scholar ]
- Wichmann, A. بازسازی مبتنی بر دستور زبان مدلهای ساختمانی سه بعدی معنایی از دادههای LiDAR موجود در هوا با استفاده از مدلسازی نیمهفضا. محاسبه کنید. علمی ۲۰۱۸ . [ Google Scholar ] [ CrossRef ]
- فن، اچ. Meng, L. یک رویکرد سه مرحله ای برای ساده سازی ساختمان های سه بعدی مدل سازی شده توسط CityGML. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۲ ، ۲۶ ، ۱۰۹۱-۱۱۰۷٫ [ Google Scholar ] [ CrossRef ]
- بالتا، اچ. ولاگیک، ج. Bosschaerts، W. دی کابر، جی. Siciliano، B. روش مبتنی بر حذف سریع آماری پرت برای ابرهای بزرگ نقطه سه بعدی محیط های بیرونی. IFAC-PapersOnLine ۲۰۱۸ ، ۵۱ ، ۳۴۸-۳۵۳٫ [ Google Scholar ] [ CrossRef ]
- Poux, F. The Smart Point Cloud: Structuring 3D Intelligent Point Data ; دانشگاه لیژ: لیژ، بلژیک، ۲۰۱۹٫ [ Google Scholar ]
- برگر، ام. تالیاساکی، آ. Seversky، LM; آلیز، پی. Guennebaud، G. لوین، جی. شرف، ع. سیلوا، سی تی بررسی بازسازی سطح از ابرهای نقطه ای. محاسبه کنید. نمودار انجمن ۲۰۱۷ ، ۳۶ ، ۳۰۱–۳۲۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پوکس، اف. Billen, R. Voxel-based 3D Point Cloud Semantic Segmentation: هندسی و رابطه ای بدون نظارت در مقابل روش های یادگیری عمیق. ISPRS Int. J. Geo-Inf. ۲۰۱۹ ، ۸ ، ۲۱۳٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پوکس، اف. نوویل، آر. ون ورش، ال. Nys, G.-A.; Billen, R. 3D Point Clouds in Archaeology: Advances in Acquisition, Processing and Knowledge ادغام اعمال شده در اشیاء شبه مسطح. Geosciences ۲۰۱۷ ، ۷ ، ۹۶٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پوکس، اف. Billen, R. یک زیرساخت ابر نقطه هوشمند برای محیط های هوشمند. در اسکن لیزری ؛ Riveiro, B., Lindenbergh, R., Eds. CRC Press: بوکا راتون، فلوریدا، ایالات متحده آمریکا، ۲۰۱۹؛ صص ۱۲۷-۱۴۹٫ شابک ۹۷۸-۱-۳۵۱-۰۱۸۸۶-۹٫ [ Google Scholar ]
- دورنینگر، پی. Pfeifer, N. یک رویکرد سه بعدی خودکار جامع برای استخراج، بازسازی و منظم سازی ساختمان از ابرهای نقاط اسکن لیزری هوابرد. Sensors ۲۰۰۸ , ۸ , ۷۳۲۳-۷۳۴۳٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کادا، م. مک کینلی، L. بازسازی ساختمان سه بعدی از LiDAR بر اساس رویکرد تجزیه سلولی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۰۹ ، ۳۸ ، ۴۷-۵۲٫ [ Google Scholar ]
- هوانگ، اچ. مایر، اچ. به سوی بازسازی ساختمان سه بعدی در مقیاس بزرگ: تجزیه و مونتاژ اولیه. در ژئونوآوری اجتماعی ؛ Bregt, A., Sarjakoski, T., Van Lammeren, R., Rip, F., Eds. انتشارات بین المللی اسپرینگر: چم، سوئیس، ۲۰۱۷; ص ۲۰۵-۲۲۱٫ شابک ۹۷۸-۳-۳۱۹-۵۶۷۵۸-۷٫ [ Google Scholar ]
- یونگ، جی. جوا، ی. Sohn, G. منظم سازی ضمنی برای بازسازی مدل های سه بعدی پشت بام ساختمان با استفاده از داده های هوابرد LiDAR. Sensors ۲۰۱۷ , ۱۷ , ۶۲۱٫ [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هن، ا. گروگر، جی. استروه، وی. Plümer, L. بازسازی سقفها بر مبنای مدل از ابرهای پراکنده نقطه LIDAR. ISPRS J. Photogramm. Remote Sens. ۲۰۱۳ ، ۷۶ ، ۱۷-۲۹٫ [ Google Scholar ] [ CrossRef ]
- ورما، وی. کومار، آر. Hsu, S. تشخیص و مدل سازی ساختمان سه بعدی از داده های هوایی LIDAR. در مجموعه مقالات کنفرانس IEEE Computer Society در سال ۲۰۰۶ در مورد دید رایانه و تشخیص الگو، نیویورک، نیویورک، ایالات متحده آمریکا، ۱۷ تا ۲۲ ژوئن ۲۰۰۶٫ جلد ۲، ص ۲۲۱۳–۲۲۲۰٫ [ Google Scholar ]
- هو، پی. یانگ، بی. دونگ، ز. یوان، پی. هوانگ، آر. فن، اچ. Sun، X. به سوی بازسازی ساختمان های سه بعدی از داده های ALS بر اساس قوانین گشتالت. Remote Sens. ۲۰۱۸ , ۱۰ , ۱۱۲۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- میلد، جی. ژانگ، ی. برنر، سی. پلومر، ال. Sester, M. بازسازی ساختمان با استفاده از توصیف ساختاری بر اساس دستور زبان رسمی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۰۸ ، ۳۷ ، ۴۷٫ [ Google Scholar ]
- شیونگ، بی. یانکوسک، ام. اود البرینک، اس. Vosselman, G. اصول اولیه ساختمان های انعطاف پذیر برای مدل سازی ساختمان های سه بعدی. ISPRS J. Photogramm. Remote Sens. ۲۰۱۵ ، ۱۰۱ ، ۲۷۵-۲۹۰٫ [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. استوتر، جی. ژائو، جی. رسمی سازی سطح جزئیات در مدل سازی سه بعدی شهر. محاسبه کنید. محیط زیست سیستم شهری ۲۰۱۴ ، ۴۸ ، ۱-۱۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واگنر، دی. ووتزر، ام. بوگدان، ج. علم، ن. پریس، م. Coors، V. اعتبارسنجی سازگاری هندسی- معنایی مدلهای CityGML. در حال پیشرفت و روندهای جدید در علوم ژئو اطلاعات سه بعدی ; Pouliot, J., Daniel, S., Hubert, F., Zamyadi, A., Eds.; Springer: برلین/هایدلبرگ، آلمان، ۲۰۱۳; صص ۱۷۱-۱۹۲٫ شابک ۹۷۸-۳-۶۴۲-۲۹۷۹۲-۲٫ [ Google Scholar ]
- عنافی، ا. Bris، AL; لافارژ، اف. مالت، سی. ارزیابی معنایی مدل های سه بعدی شهر. اثر منتشر نشده ۲۰۱۸٫ [ Google Scholar ] [ CrossRef ]
- عنافی، ا. لو بریس، ای. لافارژ، اف. مالت، سی. یک رویکرد یادگیری برای ارزیابی کیفیت مدل های سه بعدی شهر. فتوگرام مهندس Remote Sens. ۲۰۱۹ , ۸۵ , ۸۶۵–۸۷۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Ledoux, H. Val3dity: اعتبار سنجی سیستم های سه بعدی GIS بر اساس استانداردهای بین المللی. Geospat را باز کنید. نرم افزار داده ایستادن. ۲۰۱۸ ، ۳ ، ۱٫ [ Google Scholar ] [ CrossRef ]
- هاچنبرگر، پی. کتنر، ال. عملیات های مهلهورن، کی. محاسبه کنید. Geom. ۲۰۰۷ ، ۳۸ ، ۶۴-۹۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- راگورام، آر. چام، او. پولفیس، ام. ماتاس، جی. فرام، جی.-ام. USAC: چارچوبی جهانی برای اجماع نمونه تصادفی. IEEE Trans. الگوی مقعدی ماخ هوشمند ۲۰۱۳ ، ۳۵ ، ۲۰۲۲-۲۰۳۸٫ [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژائو، ز. لدوکس، اچ. Stoter, J. تعمیر خودکار ساختمان های Citygml Lod2 با استفاده از Shrink-Wrapping. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۳ ، ۳۰۹-۳۱۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
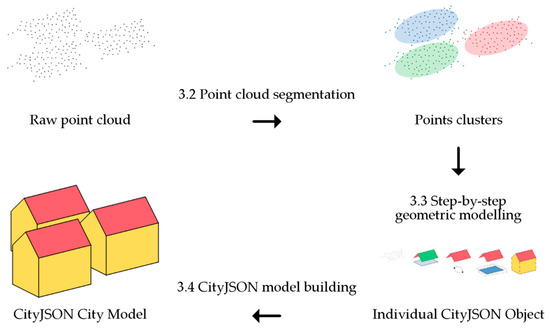
شکل ۱٫ گردش کار داده های عمومی.
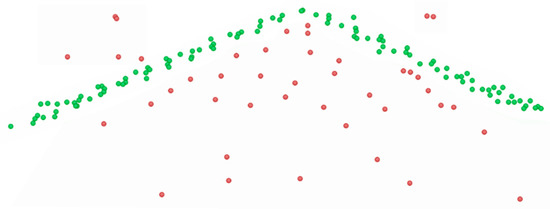
شکل ۲٫ نویز ALS در تشکیل سقف.

شکل ۳٫ گردش کار تقسیم بندی ابر نقطه ای.
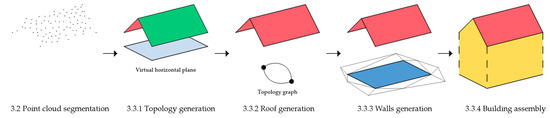
شکل ۴٫ توالی تولید قطعات.
شکل ۵٫ هندسه بازسازی منفجر شده به دنبال ماژول ها.
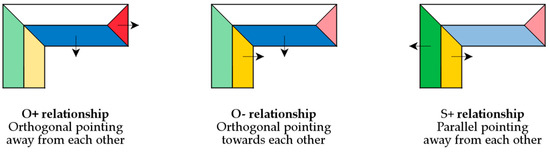
شکل ۶٫ روابط بین شیب بخش های مسطح سقف مجاور، بر اساس Verma et al. ۲۰۰۶٫
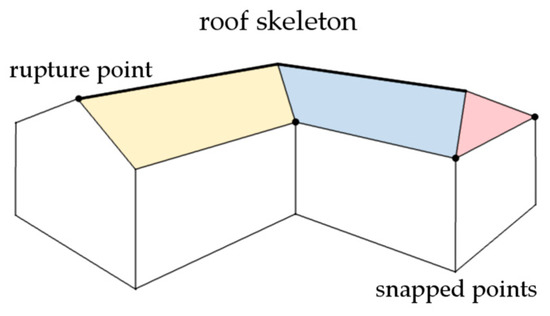
شکل ۷٫ نمایش اسکلت سقف به رنگ مشکی پررنگ.
شکل ۸٫ ساخت چند ضلعی غیر متقاطع.
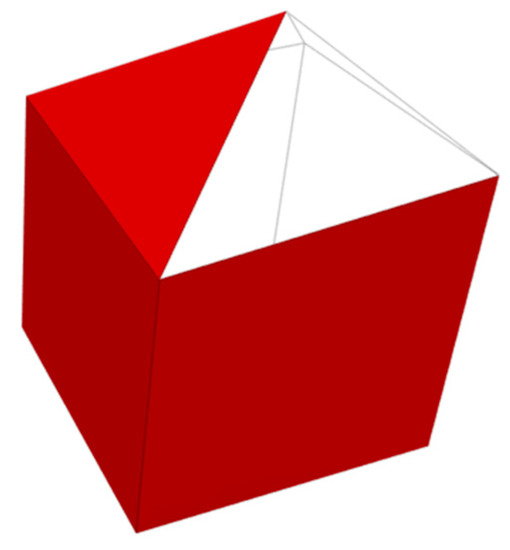
شکل ۹٫ نمونه ای از هندسه ای که در آن صفحات به درستی جهت گیری ندارند.
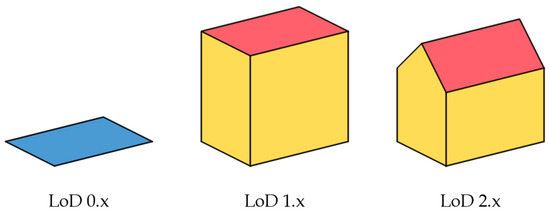
شکل ۱۰٫ نمایش طرحواره سطوح مختلف جزئیات برای یک ساختمان.
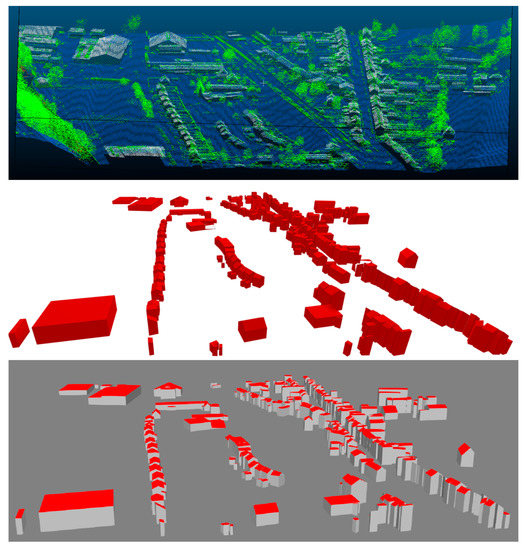
شکل ۱۱٫ نتایج از شهر Theux در بینندگان CloudCompare و CityJSON.
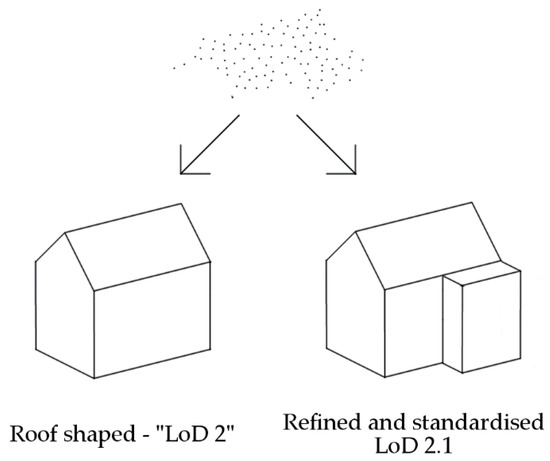
شکل ۱۲٫ از ابرهای نقطه ای تا مدل های ساختمانی.
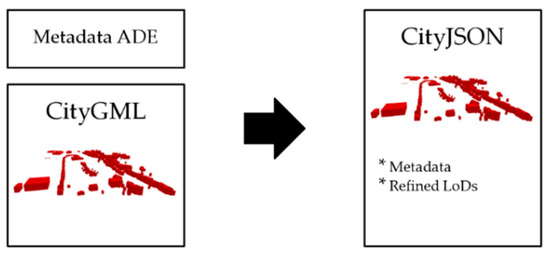
شکل ۱۳٫ ترجمه از CityGML به CityJSON.
شکل ۱۴٫ نسبت بازسازی ساختمان ها از Theux، بلژیک.
شکل ۱۵٫ تعداد صفحات با کلاس RMSE.