خلاصه
کلید واژه ها:
شبیه سازی متوالی ; مدل واریانس محلی ; ناهمگونی زمین شناسی ; تخمین عدم قطعیت ; تنوع زیر مجموعه
۱٫ معرفی
۲٫ پیشینه نظری
۲٫۱٫ تغییرپذیری فضایی
تنوع سنگ شناسی و فیزیکی موضوع مطالعات زمین شناسی متعددی است [ ۱۸ ، ۱۹ ، ۲۰ ، ۲۱ ] و معمولاً ناهمگنی نامیده می شود . در فرهنگ لغت آکسفورد [ ۲۲ ] واژه ناهمگونی به عنوان تفاوت یا تنوع در نوع از چیزهای دیگر یا ترکیبی از عناصر یا اجزای متنوع تعریف شده است. ترکیب چندگانه . در بیشتر آثار، این اصطلاح برای توصیف اینکه یک شی شامل چندین زیرمجموعه است که در یک یا چند ویژگی با یکدیگر متفاوت هستند، استفاده می شود. لی و رینولدز [ ۱] عبارت را به تغییرپذیری ویژگی سیستم در فضای سه بعدی محدود می کند. فیچ و همکاران [ ۲۳ ] مجموعهای از روشها را برای تعیین کمیت ناهمگنی در نمونهای از مشاهدات از جمله ضریب تغییرات ارائه میکند. جv)
جایی که σانحراف معیار است و μمیانگین حسابی و ضریب Dykstra–Parsons است ( جدپ)
جایی که ایکسnصدک n یک توزیع است.
۲٫۲٫ درونیابی زمین آماری
۲٫۲٫۱٫ محله فضایی
از آنجایی که سیستم معادلات خطی برای تخمین های زمین آماری ممکن است بسیار بزرگ شود، این الگوریتم ها برای عملکرد معقول به نمونه گیری زیر مجموعه ای نیاز دارند. بنابراین، یک بیضی جستجوی سه بعدی می تواند برای یافتن همسایگان یک نقطه در یک مش استفاده شود [ ۲۴ ]. این بیضی را می توان با شش ویژگی تعریف کرد: آزیموت α; شیب β; غوطه γهمراه با شعاع در X rایکس، ی ryو جهت Z rzاز بیضی α، β، و γچرخش عقربههای ساعت بیضی حول محورهای Z، X و Y را دقیقاً به این ترتیب تعریف کنید. بر این اساس، ماتریس چرخش T را می توان به صورت تعریف کرد
تی=cosαگناهα۰-گناهαcosα۰۰۰۱۱۰۰۰cosβsinβ۰−sinβcosβcosγ۰−sinγ۰۱۰sinγ۰cosγ.
پس از ترجمه مش به گونه ای که xx=xy=xz=0 و چرخاندن آن بر اساس رابطه ( ۳ )، از رابطه ( ۴ ) می توان برای تعیین اینکه آیا یک نقطه ایکس”با مختصات تبدیل شده ایکسایکس”، ایکسy”و ایکسz”در داخل یا روی مرز بیضی جستجو قرار دارد (≤۱) یا نه (>1).
rایکسایکسایکس”۲+ryایکسy”2+rzایکسz”2≤۱
۲٫۲٫۲٫ واریوگرافی
تجزیه و تحلیل واریوگرافی یک پیش نیاز حیاتی برای بسیاری از تکنیک های درونیابی زمین آماری است. بدینوسیله، نیم متغیر تجربی نشان دهنده عدم تشابه تجمعی یک مجموعه گسسته از جفت نقطه با nجنشان دهنده تعداد جفت های نقطه در کلاس های فاصله است ساعتافزایش فاصله یکسان (معادله ( ۵ )).
γ(ساعت)=۱۲nج(ساعت)∑ک=۱nج(ساعت)z(ایکسک+ساعت)-z(ایکسک)۲
همتای پیوسته، که با نیمه متغیریگرام نظری نشان داده می شود γتیساعتهo، تقریبی از نیم متغیر تجربی است با فرض z(ایکس)یک میدان تصادفی ثابت [ ۲۵ ] باشد. γتیساعتهoبرای برازش واریوگرام تجربی استفاده می شود. مدل واریوگرام کروی γسپساعتبا اثر ناگت یک مدل تودرتوی محبوب است که برای برازش نیمواریوگرام تجربی [ ۲۶ و ۲۷ ] استفاده میشود که توسط محاسبه میشود
γ(ساعت)سپساعت=n+ب·۳|ساعت|۲آ-|ساعت|۳۲آ۳اگر۰≤|ساعت|<آnاگر|ساعت|≥آ،
با n قطعه، b آستانه و a محدوده [ ۶ ]. مدل واریوگرام یک تابع کوواریانس c را با رابطه نشان می دهد γ(ساعت)تیساعتهo=ج(۰)-ج(ساعت)، که در آن c یک تابع قطعی مثبت، زوج و ج(۰)=n+بدر مورد مدل واریوگرام کروی با اثر ناگت. نیمه متغیروگرام ها می توانند برای تعیین کمیت همبستگی مکانی یا زمانی یک متغیر تصادفی استفاده شوند [ ۲۷ ، ۲۸ ، ۲۹ ]. ج و γتیساعتهoمتغیرهای ورودی برای الگوریتم های درونیابی زمین آماری هستند.
۲٫۲٫۳٫ کریجینگ ساده
کریجینگ یک تکنیک تصادفی رایج برای درونیابی خواص سنگ های زمین شناسی در فضا و زمان است [ ۳۰ ]. برآوردگر کریجینگ بهترین برآوردگر خطی بی طرفانه (BLUE) یک ویژگی است زیرا واریانس خطا را به حداقل می رساند. این ساختار کوواریانس مقادیر نمونه برداری شده در سطح جهانی را در وزن ها برای پیش بینی ارزش ترکیب می کند. z(ایکس۰)در یک مکان نمونه برداری نشده ایکس۰[ ۳۱ ]. از این رو، z(ایکس۰)با وزن دادن به مقادیر مکان های نمونه گیری شده و ساخت ترکیبی خطی از آنچه می دهد محاسبه می شود
z(ایکس۰)=∑ک=۱nwک·z(ایکسک)،
جایی که wکوزن نقطه نمونه برداری شده است ایکسکبا ارزش z(ایکسک). انواع کریجینگ در درجه اول با اشتقاق آنها از بردار وزن متفاوت است. برای همه سیستمهای کریجینگ، یک سیستم معادلات خطی باید حل شود همانطور که در پاراگرافهای زیر توضیح داده شده است، که در آن ما تکنیک کریجینگ ساده (SK) [ ۳۲ ] را در نظر میگیریم و آن را با ادغام یک میانگین محلی متغیر [ ۳۳ ] گسترش میدهیم. ]. بنابراین، معادله ( ۷ ) را به آن تغییر می دهیم
z(ایکس۰)اسک=∑ک=۱nwک·z(ایکسک)+۱-∑ک=۱nwک·μ.
که در آن میانگین ساکن شناخته شده است μاضافه شده است [ ۶ ]. در حالی که SK این را فرض می کند μدر سطح جهانی ثابت و شناخته شده است، SK با میانگین متغیر محلی فرض می کند μثابت بودن فقط در همسایگی ایکس۰. برای به دست آوردن وزن های SK، سیستمی از n معادله خطی باید حل شود که در آن n نشان دهنده تعداد همسایگان در نظر گرفته شده است. این سیستم معادلات به این صورت تعریف می شود
آw=ب،
که مطابقت دارد
ج(ایکس۱-ایکس۱)⋯ج(ایکس۱-ایکسn)⋮⋱⋮ج(ایکسn-ایکس۱)⋯ج(ایکسn-ایکسn)⏟آw1اسک⋮wnاسک⏟w=ج(ایکس۱-ایکس۰)⋮ج(ایکسn-ایکس۰)،⏟ب
با c به عنوان تابع کوواریانس و ایکسnبه عنوان نقطه با مقدار معلوم [ ۲۵ ]. در SK هر نقطه درون یابی شده یک واریانس کریجینگ ساده ارائه می دهد σاسک۲[ ۵ ] که می توانیم با استفاده از فرمول محاسبه کنیم
σاسک۲=ج(۰)-∑ک=۱nwکج(ایکسک،ایکس۰).
۲٫۲٫۴٫ در نظر گرفتن واریانس خطای اندازه گیری
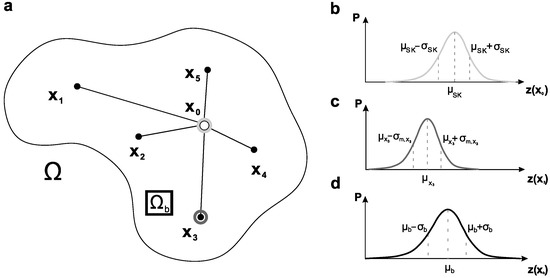
قبلاً دیدیم که کریجینگ به خودی خود یک خطای درون یابی محلی ایجاد می کند، یعنی: σاسک۲. با این حال، مؤلفه های دیگری نیز وجود دارد که نتیجه درون یابی را مغایر می کند. بعلاوه σاسک۲، تنوع محلی و ناشناخته از z(ایکس)که در Ωبو همچنین واریانس خطای اندازه گیری σمتر۲ممکن است نقش مهمی ایفا کند ( شکل ۲ ). یکپارچه سازی σمتر۲با تخمین دقت خطای اندازه گیری می توان به درون یابی دست یافت σمتربا واریانس از σمتر۲و ادغام آن در سیستم کریجینگ معادلات خطی
ج(ایکس۱-ایکس۱)+σ۱۲⋯ج(ایکس۱-ایکسn)⋮⋱⋮ج(ایکسn-ایکس۱)⋯ج(ایکسn-ایکسn)+σn2w1اسک⋮wnاسک=ج(ایکس۱-ایکس۰)⋮ج(ایکسn-ایکس۰).
۲٫۳٫ شبیه سازی ترتیبی
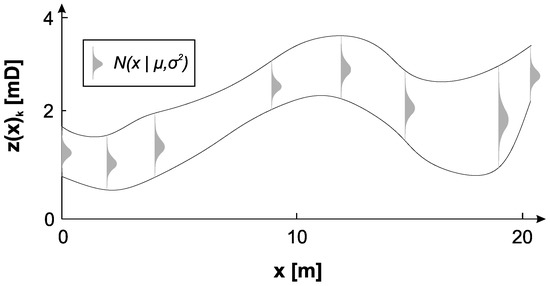
برخلاف تکنیک های درونیابی زمین آماری، شبیه سازی های متوالی با هدف بازتولید آمار جهانی در قالب مدل واریوگرام در نظر گرفته شده و هیستوگرام جهانی انجام می شود. بنابراین، به منظور محاسبه ناهمگنی فضایی یک ویژگی سنگ، میتوان از شبیهسازی گاوسی متوالی (SGS) و الگوریتم شبیهسازی متوالی مستقیم (DSS) برای شبیهسازی تک متغیره استفاده کرد. SGS بر اساس رویکرد چند گاوسی [ ۳۳ ] است، که فرض میکند خطای کریجینگ استاندارد است که معمولاً با توزیع معمولی μ= ۰ و σاسک۲= ۱٫ این مستلزم آن است که هر تابع چگالی تجمعی یک نقطهای (CDF) از هر ترکیب خطی RV به طور معمول توزیع شود، همه زیر مجموعههای RF نرمال چند متغیره باشند، توزیع دو نقطهای نرمال باشد و همه توزیعهای شرطی زیر مجموعه های RF طبیعی هستند [ ۳۳ ]. اگر RF الزامات را برآورده کند، تخمین کریجینگ ساده و واریانس CDF تجمعی خلفی را با در نظر گرفتن مدل واریوگرام نمره نرمال مشخص میکند. بنابراین، ما باید CDF توزیع اصلی را به فضای عادی استاندارد برای SGS تبدیل کنیم. به منظور تبدیل هر نقطه در CDF ( اف(ز(تو))) از هر متغیر تصادفی ز(تو)به یک تابع تصادفی Y(تو)و بالعکس می توان معادله زیر را اعمال کرد
Y(تو)=ϕ(ز(تو))=جی-۱[اف(ز(تو))]،
جایی که جی-۱CDF گاوسی معکوس است Y(تو)، که تابع چندک نیز نامیده می شود [ ۳۴ ] و ϕ CDF گاوسی معکوس است اف(ز(تو)). بنابراین، z و y با احتمالات مشابهی مطابقت دارند. برای هر نقطه از قبل درون یابی شده است ایکسjاکنون یک مقدار تصادفی از توزیع نرمال است نμاسک،σاسک۲، که PDF آن را به صورت تعریف می کند
f(ایکس)=۱σ۲πه-۱۲ایکس-μσ۲،
به عنوان رسم شده است z(ایکس۰)با استفاده از تبدیل Box-Muller [ ۳۵ ]. ما می توانیم این تبدیل را با اعمال معادله انجام دهیم
z(ایکس۰)=-۲·ورود به سیستم(تو۱)·cos(2π·تو۲)·σ+μ،
با تو۱و تو۲به عنوان اعداد تصادفی ∈[۰،۱]، σبه عنوان انحراف معیار، و μبه عنوان میانگین توزیع اصلی. این شبیهسازی در نهایت با استفاده از یک تکنیک نقشهبرداری برگشتی تبدیل چندک به فضای اصلی تبدیل میشود. بازتولید مدل کوواریانس، با این حال، تا زمانی که برآورد و واریانس از تخمین SK مشتق شده باشد، به رویکرد چند گاوسی نیاز ندارد [ ۹ ، ۱۰ ]. بنابراین، نوع توزیع شرطی، که به منظور شبیهسازی تغییرپذیری در هر نقطه انتخاب میشود، لزوماً نیازی به گاوسی بودن ندارد. با در نظر گرفتن این موضوع، بدیهی است که قبل از انجام یک شبیه سازی متوالی، نیازی به تبدیل نمره عادی نیست. این منجر به رویکرد DSS میشود که معمولاً از PDF جهانی با تعیین فاصله نمونهگیری از PDF محلی نمونهبرداری میکند [ ۹ ]].
۲٫۴٫ اعتبار سنجی مدل
۲٫۴٫۱٫ اعتبار سنجی متقابل
به منظور ارزیابی کیفیت تحقق، مدلهایی که با استفاده از تکنیکهای درونیابی یا شبیهسازی ساخته میشوند، باید اعتبارسنجی شوند. معمولاً درونیابی ها با اعتبارسنجی متقاطع تأیید می شوند. این تکنیک معمولاً با استفاده از روشهای حذف نقطه به نام اعتبارسنجی متقاطع ترک p-out (LpO CV) انجام میشود. برای LpO CV، p نمونههای انتخاب شده بهطور تصادفی از مجموعه دادههای ورودی با اندازه n حذف میشوند. ۰<پ<nو درون یابی یا شبیه سازی بدون این نمونه ها انجام می شود [ ۳۶ ]. به عنوان معیارهای خوبی برازش، میانگین مربعات خطا (MSE، معادله ( ۱۶ ))، ریشه میانگین مربع خطا (RMSE، معادله ( ۱۷ ))، و میانگین خطای مطلق (MAE، معادله ( ۱۸ ) ) تحقق را می توان به صورت محاسبه کرد
ماسE=1n∑ک=۱nz^(ایکسک)-z(ایکسک)۲،
آرماسE=1n∑ک=۱nz^(ایکسک)-z(ایکسک)۲
و
مالفE=1n∑ک=۱n|z^(ایکسک)-z(ایکسک)|،
جایی که z^(ایکسک)نقاط شبیه سازی شده هستند. در حالی که ویلموت و همکاران. [ ۳۷ ] وضعیت نابرابری مثلث را برای RMSE که برای متریک تابع فاصله مورد نیاز است، سؤال می کنند، چای و دراکسلر [ ۳۸ ] نشان می دهند که RMSE در واقع این شرط را برآورده می کند. بنابراین، اگر خطاهای مدل از توزیع نرمال پیروی کنند، RMSE نسبت به MAE برتری دارد [ ۳۸ ].
۲٫۴٫۲٫ نوسانات ارگودیک
۳٫ شبیه سازی ترتیبی با استفاده از مدل واریانس محلی
شبیه سازی های متوالی بر روی گره های انجام می شود Ωبا استفاده از اصلاح الگوریتم های SGS و DSS، یعنی LVM-SGS و LVM-DSS. ایده اصلی ما این است که اگر و فقط اگر ناهمگونی زمین شناسی بیش از حد باشد σاسک۲در ایکسک، ما از PDF ساخته شده توسط LVM به جای PDF مشتق شده از کریجینگ نمونه برداری می کنیم. در غیر این صورت، اگر خطای درون یابی بیشتر از ناهمگنی زمین شناسی قابل انتظار باشد، از PDF مشتق شده از کریجینگ نمونه برداری می کنیم. الگوریتم تعمیم یافته در الگوریتم ۱ نمایش داده شده است. همه تحلیل ها با نرم افزار منبع باز GeoReVi [ ۴۱ ] انجام شده است که در آن الگوریتم های جدید به عنوان پسوند در زبان برنامه نویسی C# ( پیوست A ) پیاده سازی شده اند.
| الگوریتم ۱ LVM-SGS و LVM-DSS |
|
۳٫۱٫ مطالعه موردی
۳٫۱٫۱٫ موضوع تحقیق
۳٫۱٫۲٫ استراتژی نمونه گیری
۳٫۱٫۳٫ اندازه گیری های آزمایشگاهی
۳٫۱٫۴٫ نسل مش
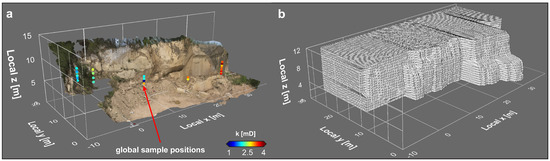
به منظور ساخت Ω، دیوار رخنمون با استفاده از یک نمایش فتوگرامتری مدل سازی شده است که نمونه برداری شده است ۴۰×۲۰چهره ها و متعاقباً با استفاده از درون یابی شپرد p -value IDW درون یابی شد، که می توانیم آن را به صورت بنویسیم
z(ایکس۰)=∑ک=۱n1/دکپ·z(ایکسک)∑ک=۱n1/دکپ،
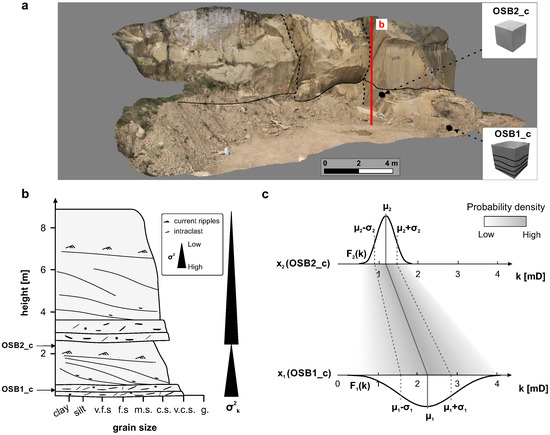
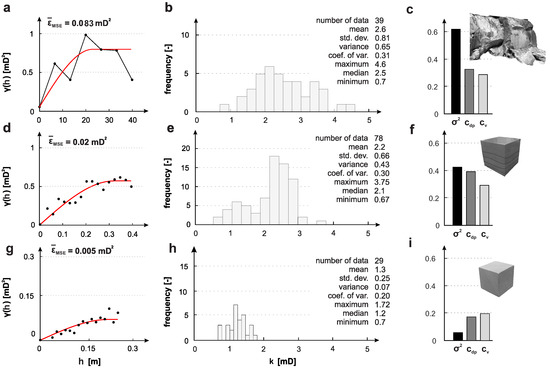
جایی که d فاصله اقلیدسی بین نقطه ای با مقدار شناخته شده است ایکسکو نقطه با مقدار مجهول ایکس۰و p یک عامل توان برای تأثیر غیرخطی وزن ها است. IDW با شعاع جستجوی کوتاه پنج متر و پارامتر قدرت چهار اعمال شده است. نتیجه درونیابی دارای RMSE 0.024 متر است که می تواند برای درونیابی سطحی کم در نظر گرفته شود. سطح رخنمون حاصل به عنوان یک سطح مرزی برای یک مش شش وجهی استفاده می شود که نشان دهنده Ω، که از ۷۵۲۴۰ سلول تشکیل شده است ( شکل ۴ ب، جدول ۱ ). مکعب های سنگ، که نشان دهنده Ωب، توسط یک شبکه متعامد و شش ضلعی که به ترتیب حاوی ۲۵۲۳۰ (OSB2_c) و ۶۴۰۰۰ سلول (OSB1_c) است ساخته شده اند. حجم یک سلول متوسط از مش رخنمون تقریباً هشت برابر حجم OSB1_c و ۱۵ برابر حجم OSB2_c است ( جدول ۱ ).
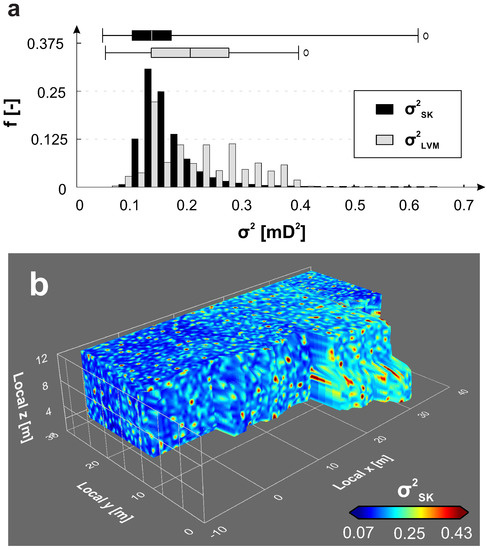
واریانس σج۲بهدستآمده از اندازهگیریهای انجامشده بر روی نمونهها از مکعبهای سنگ، فرض میشود که واریانس را نشان میدهد σΩب۲که می توان در یک سلول از مش رخنمون انتظار داشت به طوری که
σLVم۲≈σΩب۲،
با σLVم۲واریانس نمونه محلی است که می توانیم با استفاده از فرمول آن را محاسبه کنیم
σ۲=۱n∑من=۱n(ایکسمن-μ)۲،
که در آن n تعداد کل نمونه ها است، μمیانگین و ایکسمننمونه در محل i است.
۴٫ نتایج
۴٫۱٫ تغییرپذیری فضایی
۴٫۲٫ ساخت LVM
۴٫۳٫ بهینه سازی BLUE برای شبیه سازی متوالی
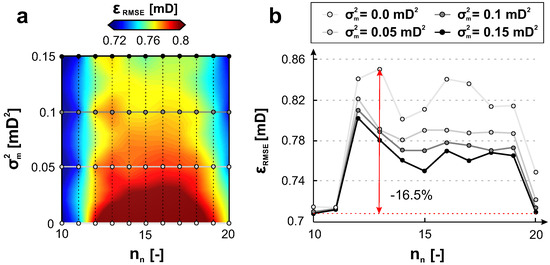
قبل از شبیه سازی متوالی، شرایط SK بهینه با توجه به واریانس خطای اندازه گیری یکپارچه σمتر۲و محله انتخابی مشخص می شود. بنابراین، یک بهینهسازی برنامهنویسی اعداد صحیح ساده با استفاده از واریانسهای خطای اندازهگیری متفاوت انجام میشود. ۰٫۰mD ۲ ≤σمتر۲≤۰٫۱۵mD ۲) و تعداد متفاوتی از همسایگان ( ۱۰≤nn≤۲۰) به عنوان محدودیت های نابرابری. می توانیم مسئله بهینه سازی را به صورت بیان کنیم
دقیقهσمتر۲∈آر،nn∈نϵاسک(σمتر۲،nn)موضوعبه۰≤σm2≤۰٫۱۵۱۰≤nn≤۲۰,
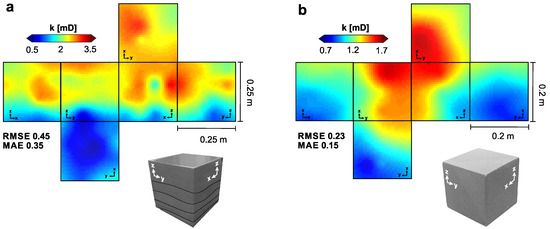
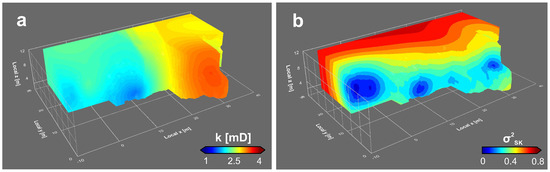
که در آن خطای SK ϵSKدر قالب RMSE و MAE باید به حداقل برسد. سطح پاسخ فرآیند بهینه سازی عددی نشان می دهد که خطای SK به طور کلی در حال کاهش است σm2در حال افزایش است. کمترین خطا با یک تولید می شود nnاز ۱۰، ۱۱ و ۲۰٫ این حساسیت خطای SK روی تعداد نقاط همسایه غیرعادی نیست. بهینهسازی عددی نشان میدهد که شرایط بهینه برای SK در آن برآورده میشود nn=20و σm2= 0.15 که RMSE 0.708 mD را به دست می دهد ( شکل ۸ ). خطای درون یابی را می توان ۱۶٫۵% برای RMSE و ۱۸٫۵% برای MAE کاهش داد. تحقق نهایی SK و توزیع فضایی σSK2برای آن مدل دقیق در شکل ۹ نشان داده شده است . لازم به ذکر است که توزیع فضایی از σSK2در یک شبیه سازی متوالی متفاوت است زیرا مکان های شبیه سازی شده قبلی نیز در نظر گرفته می شوند.
۴٫۴٫ σSK2در مقابل σLVM2
۴٫۵٫ اعتبار سنجی مدل
خروجی های بصری
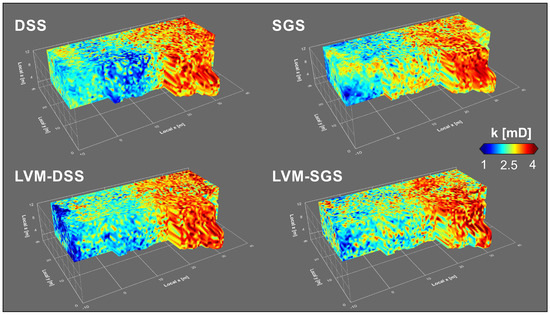
بدیهی است که همه الگوریتم های شبیه سازی نتایج قابل مقایسه بصری را ارائه می دهند ( شکل ۱۲ ). لازم به ذکر است که چهارضلعی های مدل های سه بعدی با استفاده از طرح Catmull-Clark [ ۵۵ ] برای تجسم تقسیم می شوند. در این طرح، یک نقطه جدید در یک چهارضلعی محاسبه می شود
ایکسjک+۱=۱n∑من=۰n-1ایکسمنک،
با ایکسjک+۱به عنوان نقطه جدید در مرحله تقسیم ک+۱در مرکز عنصر j با n راس در مرحله تقسیم k . این تکنیک الگوهای قابل مشاهده در مدل ها را صاف می کند. روندی آشکار در تمامی تحقق ها وجود دارد که نشان می دهد بیشترین مقادیر در قسمت شرقی معدن و کمترین مقادیر در قسمت غربی قرار دارد. با توجه به اینکه الگوریتم های اعمال شده مشروط هستند، این روند به خوبی با محدودیت های داده شده توسط اندازه گیری های جهانی مطابقت دارد، که همچنین بالاترین مقادیر را در قسمت شرقی معدن و کمترین مقدار را در قسمت غربی ارائه می دهد ( شکل ۴). آ). این روند به وضوح در تحقق DSS و LVM-DSS نشان داده شده است ( شکل ۱۲). SGS و DSS تمایل بیشتری به ایجاد مناطق همگن نسبت به معادل LVM خود دارند. بنابراین، آن الگوریتمها ممکن است یک همگنی را نشان دهند که احتمالاً در لایهها وجود ندارد. علاوه بر این، ناهمگونی معادلهای LVM نسبت به مدلهای تولید شده توسط الگوریتمهای مرسوم بهطور واقعبینانهتر در امتداد سطوح مرزی در معدن جهتگیری میکند.
۵٫ بحث
۵٫۱٫ ساخت LVM
۵٫۲٫ مقایسه توزیع فضایی واریانس محلی
۶٫ نتیجه گیری
-
معیارهای فاصله RMSE و MAE در درونیابی های فضایی را می توان با توجه به واریانس خطای اندازه گیری و همسایگی بهینه بهینه کرد.
-
نمونههای زمینشناسی همیشه زیرمجموعه کوچکی از تنوع محلی را نشان میدهند که حداقل باید با نمونهبرداری با وضوح بالا و به صورت تصادفی در نظر گرفته شود.
-
واریانس کریجینگ ساده لزوماً برای بزرگی تنوع محلی در رسانه های زمین شناسی و قطعاً برای توزیع فضایی آن حساب نمی کند.
-
این واقعیت که واریانس کریجینگ ساده محلی یک روند زمینشناسی را منعکس نمیکند، ممکن است هنگام استفاده از مدلهای مشتقشده از شبیهسازی متوالی به عنوان پایهای برای فرآیندهای بهرهبرداری زیرسطحی، منجر به مشکلات پیشبینی نشده شود، زیرا ممکن است ناهمگونی کامل زمینشناسی به درستی در نظر گرفته نشده باشد.
-
با معرفی یک مدل واریانس محلی مبتنی بر زمین شناسی محدود شده با اندازه گیری، توزیع فضایی واریانس مورد انتظار در معدن مورد بررسی را می توان در شبیه سازی های متوالی ادغام کرد. این امکان شبیه سازی تنوع زمین شناسی را فراهم می کند، که ممکن است بیشتر از تغییرپذیری شبیه سازی شده در الگوریتم های شبیه سازی متوالی مرسوم باشد.
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| CDF | تابع توزیع تجمعی |
| DSS | شبیه سازی ترتیبی مستقیم |
| LVM | مدل واریانس محلی |
| CV LpO | اعتبار سنجی متقاطع را ترک کنید |
| MAE | میانگین-مطلق-خطا |
| MSE | خطای میانگین مربع |
| تابع چگالی احتمال | |
| REV | نماینده حجم ابتدایی |
| RMSE | خطای ریشه میانگین مربع |
| RF | تابع تصادفی |
| RV | متغیر تصادفی |
| SGS | شبیه سازی گاوسی متوالی |
| SK | کریجینگ ساده |
پیوست A. کد و در دسترس بودن داده ها
منابع
- لی، اچ. رینولدز، جی. در تعریف و کمیت ناهمگنی. Oikos ۱۹۹۵ ، ۷۳ ، ۲۸۰-۲۸۴٫ [ Google Scholar ] [ CrossRef ]
- کرویجمانس، RA; ویلمز، CJL; نیک، اچ ام. Bruhn، DF تأثیر ناهمگونی رخساره بر عملکرد دوگانه در مخازن رسوبی زمین گرمایی کم آنتالپی. Geothermics ۲۰۱۶ ، ۶۴ ، ۲۰۹-۲۱۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رودریگو-ایلاری، جی. ریزینگر، ام. گومز-هرناندز، JJ تأثیر ناهمگونی بر شبیهسازیهای انتقال حرارت در سیستمهای زمین گرمایی کم عمق. در زمین آمار والنسیا ۲۰۱۶ ; Springer: برلین، آلمان، ۲۰۱۷; صص ۸۴۹-۸۶۲٫ [ Google Scholar ] [ CrossRef ]
- شپرد، دی. تابع درونیابی دو بعدی برای داده های با فاصله نامنظم. در مجموعه مقالات کنفرانس ملی ACM 1968، نیویورک، نیویورک، ایالات متحده آمریکا، ۲۷-۲۹ اوت ۱۹۶۸; صص ۵۱۷-۵۲۴٫ [ Google Scholar ] [ CrossRef ]
- وبستر، آر. مارگارت، AO Geostatistics for Environmental Scientists , ۲nd ed.; Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007; پ. ۳۳۰٫ [ Google Scholar ]
- Deutsch، CV; Journel , A. GSLIB: کتابخانه نرم افزار زمین آماری و راهنمای کاربر . انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، ۱۹۹۸٫ [ Google Scholar ]
- Tran, TT بهبود تولید مثل واریوگرام در شبکه های شبیه سازی متراکم. محاسبه کنید. Geosci. ۱۹۹۴ ، ۲۰ ، ۱۱۶۱-۱۱۶۸٫ [ Google Scholar ] [ CrossRef ]
- Leuangthong، O. مک لنان، جی. Deutsch، CV حداقل معیارهای پذیرش برای تحقق زمین آماری. نات. منبع. Res. ۲۰۰۴ ، ۱۳ ، ۱۳۱-۱۴۱٫ [ Google Scholar ] [ CrossRef ]
- Soares، A. شبیه سازی متوالی مستقیم و شبیه سازی. ریاضی. جئول ۲۰۰۱ ، ۳۳ ، ۹۱۱-۹۲۶٫ [ Google Scholar ] [ CrossRef ]
- رابرتسون، RK; مولر، UA; بلوم، شبیه سازی متوالی مستقیم LM با بازتولید هیستوگرام: مقایسه الگوریتم ها محاسبه کنید. Geosci. ۲۰۰۶ ، ۳۲ ، ۳۸۲-۳۹۵٫ [ Google Scholar ] [ CrossRef ]
- ژورنل، ا. آلابرت، اف. گسترش داده های غیر گاوسی در علوم زمین. Terra Nova ۱۹۸۹ ، ۱ ، ۱۲۳-۱۳۴٫ [ Google Scholar ] [ CrossRef ]
- ورلی، جی. شبیهسازی گاوسی متوالی: روش مونت کارلو برای تولید مدلهای تخلخل و نفوذپذیری. در تولید، انباشت و تولید هیدروکربن های اروپا III ; اسپنسر، AM، اد. Springer: برلین/هایدلبرگ، آلمان، ۱۹۹۳; صص ۳۴۵-۳۵۶٫ [ Google Scholar ]
- ارسوی، ا. Yünsel، TY شبیه سازی شرطی زمین آماری برای ارزیابی ویژگی های کیفی ذخایر زغال سنگ Cayırhan. کاوش انرژی بهره برداری. ۲۰۰۶ ، ۲۴ ، ۳۹۱-۴۱۶٫ [ Google Scholar ] [ CrossRef ]
- دلبری، م. افراسیاب، پ. Loiskandl، W. استفاده از شبیهسازی گاوسی متوالی برای ارزیابی عدم قطعیت فضایی در مقیاس میدانی محتوای آب خاک. CATENA ۲۰۰۹ ، ۷۹ ، ۱۶۳-۱۶۹٫ [ Google Scholar ] [ CrossRef ]
- پینیرو، ام. امری، ایکس. میراندا، تی. لاماس، ال. اسپادا، ام. مدل سازی ناهمگونی های ژئوتکنیکی با استفاده از شبیه سازی زمین آماری و تجزیه و تحلیل تفاوت های محدود. Minerals ۲۰۱۸ ، ۸ ، ۵۲٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- جعبه، GEP؛ مولر، ME نکته ای در مورد تولید انحرافات طبیعی تصادفی. ان ریاضی. آمار. ۱۹۵۸ ، ۲۹ ، ۶۱۰-۶۱۱٫ [ Google Scholar ] [ CrossRef ]
- Matheron, G. اصول زمین آمار. اقتصاد جئول ۱۹۶۳ ، ۵۸ ، ۱۲۴۶-۱۲۶۶٫ [ Google Scholar ] [ CrossRef ]
- Anyiam، OA; اندرو، پی جی. Okwara، IC ارزیابی ناهمگنی و ارزیابی پتروفیزیکی مخازن در “میدان اکبر”، دلتای نیجر، نیجریه. جی. پت. کاوش کنید. تولید تکنولوژی ۲۰۱۷ ، ۷ ، ۱۰۳۵-۱۰۵۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- میچی، EAH؛ Haines، TJ تنوع و ناهمگنی خواص پتروفیزیکی سنگهای گسل کربنات کششی، مالت. حیوان خانگی Geosci. ۲۰۱۶ ، ۲۲ ، ۱۳۶-۱۵۲٫ [ Google Scholar ] [ CrossRef ]
- موکرجی، تی. ماوکو، جی. ریو، P. مقیاس ناهمگونی های مخزن و تاثیر تفکیک لرزه ای بر یکپارچگی زمین آماری. ریاضی. جئول ۱۹۹۷ ، ۲۹ ، ۹۳۳-۹۵۰٫ [ Google Scholar ] [ CrossRef ]
- De Ros، LF; Scherer، کنترلهای چینهشناسی CMS بر روی توزیع فرآیندهای دیاژنتیکی، کیفیت و ناهمگونی مخازن رودخانهای-بادی از حوضه Recôncavo، برزیل. در پیوند دیاژنز به چینه شناسی توالی ; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; صص ۱۰۵-۱۳۲٫ [ Google Scholar ] [ CrossRef ]
- فرهنگ لغت انگلیسی آکسفورد. ناهمگونی ؛ انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، ۲۰۱۴٫ [ Google Scholar ]
- Fitch، PJR؛ لاول، MA; دیویس، اس جی. پریچارد، تی. هاروی، PK یک رویکرد یکپارچه و کمی به ناهمگنی پتروفیزیکی. مارس پت. جئول ۲۰۱۵ ، ۶۳ ، ۸۲-۹۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رمی، ن. بوچر، ا. Wu, J. زمین آمار کاربردی با SGeMS: راهنمای کاربر . انتشارات دانشگاه کمبریج: کمبریج، انگلستان، ۲۰۰۹٫ [ Google Scholar ] [ CrossRef ]
- Wackernagel, H. Multivariate Geostatistics , ۳rd ed.; Springer: برلین/هایدلبرگ، آلمان، ۲۰۰۳; پ. ۳۸۸٫ [ Google Scholar ] [ CrossRef ]
- آرمسترانگ، ام. واریوگرام های تجربی. در زمین آمار خطی پایه ; Springer: برلین/هایدلبرگ، آلمان، ۱۹۹۸; ص ۴۷-۵۸٫ [ Google Scholar ] [ CrossRef ]
- رینگروس، پی. Bentley, M. Reservoir Model Design , ۱st ed.; Springer: Dordrecht، هلند، ۲۰۱۵; پ. ۲۴۹٫ [ Google Scholar ] [ CrossRef ]
- گو، ی. Rühaak، W. پارس سگ.؛ Sass, I. استفاده از داده های لرزه ای برای تخمین توزیع فضایی هدایت حرارتی سنگ در مقیاس مخزن. Geothermics ۲۰۱۷ ، ۶۶ ، ۶۱-۷۲٫ [ Google Scholar ] [ CrossRef ]
- Rühaak، W. گوادانینی، آ. گایگر، اس. پارس سگ.؛ گو، ی. آرتز، ا. هوموث، اس. Sass, I. ارتقاء رسانایی حرارتی سازندهای رسوبی برای اکتشاف زمین گرمایی. Geothermics ۲۰۱۵ ، ۵۸ ، ۴۹-۶۱٫ [ Google Scholar ] [ CrossRef ]
- Rühaak, W. درونیابی ۳-بعدی داده های دمای زیرسطحی با خطای اندازه گیری با استفاده از کریجینگ. محیط زیست علوم زمین ۲۰۱۵ ، ۷۳ ، ۱۸۹۳-۱۹۰۰٫ [ Google Scholar ] [ CrossRef ]
- بیلی، تی. Gatrell، A. تجزیه و تحلیل داده های فضایی تعاملی . Longman Group Limited: هارلو، انگلستان، ۱۹۹۵; پ. ۴۳۲٫ [ Google Scholar ]
- Journel, AG تخمین ناپارامتری توزیع های فضایی. J. Int. دانشیار ریاضی. جئول ۱۹۸۳ ، ۱۵ ، ۴۴۵-۴۶۸٫ [ Google Scholar ] [ CrossRef ]
- Goovaerts, P. Geostatistics for Natural Resources Evaluation ; انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، ۱۹۹۷٫ [ Google Scholar ]
- Remy, N. روشهای الگوریتمی و نرمافزاری برای ادغام بهتر اطلاعات زمینشناسی در مدلهای عددی . دانشگاه استندفورد: استنفورد، کالیفرنیا، ایالات متحده آمریکا، ۲۰۰۴٫ [ Google Scholar ]
- اوکتن، جی. Göncü، A. ایجاد توالی با اختلاف کم از توزیع نرمال: جعبه-مولر یا تبدیل معکوس؟ ریاضی. محاسبه کنید. مدل. ۲۰۱۱ ، ۵۳ ، ۱۲۶۸-۱۲۸۱٫ [ Google Scholar ] [ CrossRef ]
- سلیس، الف. اعتبارسنجی متقاطع بهینه در تخمین چگالی با اتلاف L2. ان آمار ۲۰۱۴ ، ۴۲ ، ۱۸۷۹-۱۹۱۰٫ [ Google Scholar ] [ CrossRef ]
- ویلموت، سی جی; ماتسورا، ک. Robeson، SM ابهامات ذاتی در آمار خطاهای مبتنی بر مجموع مربعات. اتمس. محیط زیست ۲۰۰۹ ، ۴۳ ، ۷۴۹-۷۵۲٫ [ Google Scholar ] [ CrossRef ]
- چای، تی. Draxler، RR ریشه میانگین مربعات خطا (RMSE) یا میانگین خطای مطلق (MAE)؟ – استدلال هایی علیه اجتناب از RMSE در ادبیات. Geosci. مدل Dev. ۲۰۱۴ ، ۷ ، ۱۲۴۷-۱۲۵۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Emery, X. تست درستی الگوریتم ترتیبی برای شبیه سازی میدان های تصادفی گاوسی. استوک. محیط زیست Res. ارزیابی ریسک ۲۰۰۴ ، ۱۸ ، ۴۰۱-۴۱۳٫ [ Google Scholar ] [ CrossRef ]
- لینسل، ا. ویزلر، اس. هورنونگ، جی. Hinderer، M. تجزیه و تحلیل با وضوح بالا ویژگی های فیزیکوشیمیایی محیط های ماسه سنگی در مقیاس رخساره های سنگی. بحث زمین جامد ۲۰۲۰ ، ۲۰۲۰ ، ۱-۲۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Linsel, A. ApirsAL/GeoReVi: GeoReVi v1.0.0 Pre-Release. در دسترس آنلاین: https://zenodo.org/record/3541136#.XvhBb3ERWUk (دسترسی در ۲۰ دسامبر ۲۰۱۹).
- بکر، ا. شوارتز، ام. Schäfer, A. Lithostratigraphische Korrelation des Rotliegend im östlichen Saar-Nahe-Becken. Jahresberichte Und Mitteilungen Des Oberrheinischen Geologischen Vereins ۲۰۱۲ ، ۹۴ ، ۱۰۵-۱۳۳٫ [ Google Scholar ] [ CrossRef ]
- آرتز، ا. پارس سگ.؛ گوتز، AE; Sass، I. مطالعه آنالوگ رخنمون سازندهای مخزن ماسه سنگ زمین گرمایی پرموکربونیفر (شمال راین بالا گرابن، آلمان): تاثیر محتوای معدنی، محیط رسوبی و دیاژنز بر خواص پتروفیزیکی. بین المللی J. Earth Sci. ۲۰۱۵ ، ۱۰۵ ، ۱۴۳۱-۱۴۵۲٫ [ Google Scholar ] [ CrossRef ]
- فرخوتدینوف، آ. جام، پ. د فوکه، سی. Cherkasov، S. مطالعه موردی مدلسازی یک مخزن هیدروترمال: کانسار خانکالا از آبهای زمین گرمایی. Geothermics ۲۰۱۶ ، ۵۹ ، ۵۶-۶۶٫ [ Google Scholar ] [ CrossRef ]
- نوردال، ک. Ringrose، PS شناسایی حجم ابتدایی نماینده برای نفوذپذیری در کانسارهای هترولیتیک با استفاده از مدلهای سنگ عددی. ریاضی. Geosci. ۲۰۰۸ ، ۴۰ ، ۷۵۳٫ [ Google Scholar ] [ CrossRef ]
- نوردال، ک. مسینا، سی. برلند، اچ. روستاد، AB; ریمستاد، ای. مارتینیوس، AW; هاول، ج.ا. تأثیر خوب، TR مدلسازی چند مقیاسی بر توزیع تخلخل و نفوذپذیری پیشبینیشده در نهشتههای رودخانهای عضو لوند بالایی (میدان اسنور، فلات قاره نروژ). در هندسه رسوب-بدن و ناهمگنی: مطالعات آنالوگ برای مدلسازی زیرسطحی ; انجمن زمین شناسی لندن: لندن، انگلستان، ۲۰۱۴; جلد ۳۸۷، ص. ۲۵٫ [ Google Scholar ] [ CrossRef ]
- میدلتون، رسوب GV از جریان های کدورت. آنو. سیاره زمین کشیش. علمی ۱۹۹۳ ، ۲۱ ، ۸۹-۱۱۴٫ [ Google Scholar ] [ CrossRef ]
- آگهمار، تی. وبر، جی. شولز، آر. تولید انرژی زمین گرمایی عمیق در آلمان. انرژی ها ۲۰۱۴ ، ۷ ، ۴۳۹۷-۴۴۱۶٫ [ Google Scholar ] [ CrossRef ]
- Filomena، CM; هورنونگ، جی. استولهوفن، اچ. ارزیابی دقت اندازهگیریهای نفوذپذیری گاز محور: مطالعه مقایسهای دستگاههای نفوذ سنج سلولی هاسلر و پروب. زمین جامد ۲۰۱۴ ، ۵ ، ۱-۱۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Bär, K. Untersuchung der tieFengeothermischen Potenziale von Hessen ; Technische Universität Darmstadt: دارمشتات، آلمان، ۲۰۱۲; پ. ۲۹۷٫ [ Google Scholar ]
- Massey, FJ آزمون کولموگروف-اسمیرنوف برای خوبی تناسب. مربا. آمار دانشیار ۱۹۵۱ ، ۴۶ ، ۶۸-۷۸٫ [ Google Scholar ] [ CrossRef ]
- سیمرد، ر. Ecuyer, P. محاسبه توزیع دو طرفه Kolmogorov-Smirnov. J. Stat. نرم افزار ۲۰۱۱ ، ۱ . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Tukey, J. تجزیه و تحلیل داده های اکتشافی ; Addison-Wesley: Reading، MA، ایالات متحده آمریکا، ۱۹۷۷; پ. ۷۱۲٫ [ Google Scholar ]
- کوربت، پی. Jensen, JL برآورد نفوذپذیری متوسط: به چند اندازه گیری نیاز دارید؟ First Break ۱۹۹۲ , ۱۰ , ۵٫ [ Google Scholar ] [ CrossRef ]
- Catmull, E. A Subdivision Algorithm for Computer Display of Curved Surfaces ; دانشگاه یوتا: سالت لیک سیتی، یوتا، ۱۹۷۴٫ [ Google Scholar ]
- Journel, AG Geostatistics: مدل ها و ابزارهایی برای علوم زمین. ریاضی. جئول ۱۹۸۶ ، ۱۸ ، ۱۱۹-۱۴۰٫ [ Google Scholar ] [ CrossRef ]
- Matheron، G. توابع تصادفی ذاتی و کاربردهای آنها. Adv. Appl. احتمالا. ۱۹۷۳ ، ۵ ، ۴۳۹-۴۶۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- منتوگلو، ع. Wilson, JL روش باندهای چرخشی برای شبیهسازی میدانهای تصادفی با استفاده از تولید خط به روش طیفی. منبع آب Res. ۱۹۸۲ ، ۱۸ ، ۱۳۷۹-۱۳۹۴٫ [ Google Scholar ] [ CrossRef ]
- امری، ایکس. Lantuéjoul, C. TBSIM: یک برنامه کامپیوتری برای شبیهسازی شرطی میدانهای تصادفی گاوسی سهبعدی از طریق روش باندهای چرخشی. محاسبه کنید. Geosci. ۲۰۰۶ ، ۳۲ ، ۱۶۱۵-۱۶۲۸٫ [ Google Scholar ] [ CrossRef ]
- پرواززار، س. امری، ایکس. مدنی، ن. مقایسه الگوریتمهای گاوسی متوالی و باندهای چرخشی برای شبیهسازی درجهها در نهشتههای چند عنصری. Comptes Rendus Geosci. ۲۰۱۵ ، ۳۴۷ ، ۸۴-۹۳٫ [ Google Scholar ] [ CrossRef ]
|
در دسترس بودن نمونه: نمونههای سنگ مورد بررسی در موسسه علوم زمین کاربردی دارمشتات موجود است و میتوانید از طریق linsel@geo.tu-darmstadt.de درخواست کنید. علاوه بر این، نمونه ها در سیستم ثبت نمونه زمین (SESAR، www.geosamples.org ) ثبت می شوند.
|