۱٫ مقدمه
سلامت انسان تحت تأثیر قرار گرفتن در معرض آلاینده های هوا با بیماری های مزمن و طولانی مدت از تحریک دستگاه تنفسی فوقانی تا عوارض مرگبار مانند سرطان ریه و بیماری های قلبی است [ ۱ ]. علت اصلی آن مصرف روزافزون انرژی است که بیشتر آن به شکل سوزاندن سوخت های فسیلی است. این مقدار زیادی دی اکسید کربن (CO ۲ ) تولید می کند که به گرم شدن سیاره ما کمک می کند و در عین حال مجموعه ای از آلاینده های هوا را تولید می کند که تأثیر مستقیم و مضری بر سلامت انسان دارند: مونوکسید کربن (CO). دی اکسید گوگرد (SO ۲ )، اکسیدهای نیتروژن ( NOx) و ذرات معلق در اندازه های مختلف (PM-1، PM-2.5 و PM-10). علاوه بر این، قرار گرفتن در معرض طولانی مدت با مرگ و میر زودرس مرتبط است [ ۲ ].
این مشکل در سطح قانونگذاری با نصب سیستم های نظارتی در مناطق شهری حل شده است. سیستم های فعلی معمولاً به صورت پراکنده در منطقه شهری با وضوح فضایی بسیار پایین توزیع می شوند. به عنوان مثال، در منطقه رم ۱۳ ایستگاه نظارتی وجود دارد که توسط ARPA اداره می شود، آژانس محیط زیست لاتزیو [ ۳ ]، که ۱۰ مورد آن در داخل “Grande Raccordo Anulare” (GRA، کمربندی اطراف شهر) قرار دارند. اگر شعاع متوسط ۹ کیلومتر برای GRA در نظر گرفته شود، آنگاه هر ایستگاه در صورت توزیع یکنواخت سطح ۲۵ کیلومتر مربع را پوشش می دهد. اگر کل سطح شهرداری (۱۲۸۵ کیلومتر مربع) و تمام سیستم های موجود در نظر گرفته شود ، این رقم به ۹۹ کیلومتر مربع می رسد .. وضعیت مشابهی را می توان در اکثر شهرهای بزرگ در سراسر جهان یافت، به عنوان مثال، در پکن ۲۲ ایستگاه وجود دارد که هر ایستگاه ۱۱۳ کیلومتر مربع را پوشش می دهد ، و در لندن ۱۴ ایستگاه وجود دارد که هر ایستگاه ۱۱۲ کیلومتر مربع را پوشش می دهد [ ۴ ] .
پراکندگی دادهها در نتیجه نیاز به تخمین آلایندهها در مناطق اندازهگیری نشده با استفاده از روشهای مختلف، بهعنوان مثال، میانگینگیری مکانی، نزدیکترین همسایه، وزندهی معکوس فاصله (IDW)، درونیابی Spline، Kriging، Land- را ایجاد کرده است. از مدل سازی رگرسیون (LUR)، مدل سازی پراکندگی و روش های شبکه عصبی [ ۴ ] استفاده کنید.
در سالهای اخیر، در دسترس بودن دستگاههای سنجش آلودگی کوچکتر و سیستم ماهوارهای ناوبری جهانی (GNSS) راه را برای سیستمهای سیار کوچک برای پایش آلایندههای هوا باز کرده است [ ۵ ]. این امر چگالی داده ها را افزایش می دهد، اما مشکل پراکندگی را حل نمی کند، زیرا اندازه گیری های موبایل معمولاً در خیابان ها یا در مناطق خاص انجام می شود. به منظور به دست آوردن یک نمای بزرگتر، همان روش هایی که قبلا برای درونیابی داده ها از ایستگاه های پایش توسعه داده شده بود، در مورد داده های آلودگی هوای سیار نیز استفاده شده است [ ۴ ].
هدف این مقاله توصیف یک سیستم پایش آلاینده هوا متشکل از سه عنصر مختلف است: یک دستگاه با اندازه کوچک متحرک با سنسورهای کم هزینه (LCS)، یک زیرساخت جاده برای ارتباط داده ها (جاده هوشمند)، و یک مرکز محاسبات مرکزی [ ۶]. دستگاه حسگر را می توان به راحتی توسط وسایل نقلیه در مناطق شهری حمل کرد، به عنوان مثال، اتومبیل های شخصی، اتوبوس های حمل و نقل انبوه، و وسایل نقلیه خدمات شهرداری. در این کار، ما موردی را تجزیه و تحلیل کردیم که در آن چندین LCS از نظر جغرافیایی در یک محیط شهری پراکنده شدهاند، دادههای کیفیت هوا را جمعآوری کرده و آنها را به یک پلت فرم پردازش متمرکز شهری منتقل میکنند. ستون فقرات ارتباطی توسط یک زیرساخت هوشمند، یعنی یک جاده هوشمند (SR) فراهم شده است، که در کنار سایر قابلیت ها، می تواند داده های جمع آوری شده را به مرکز محاسباتی مرکزی منتقل کند. این یک سیستم پشتیبانی تصمیم (DSS) مبتنی بر GIS، به نام تجزیه و تحلیل ریسک حفاظت از زیرساختهای حیاتی و پیشبینی (CIPCast) را اجرا میکند، که برای اجرای نظارت، پردازش و درونیابی دادهها در زمان واقعی با هدف احتمالاً صدور هشدار با توجه به موارد مختلف طراحی شده است. مناطق شهر [۷ ].
در ادامه، سیستم با استفاده از AlphaSense OPC-N2، یک LCS شناخته شده و قابل اعتماد برای داده های ذرات، توضیح داده شده است. علاوه بر ویژگی های خوب، غلظت ذرات یکی از پارامترهای کلیدی برای پایش کیفیت هوا و در نتیجه امکان کاهش یا حذف کامل تردد وسایل نقلیه در مناطق شهری است.
تکنیکهای تجسم زمین میتوانند اطلاعاتی را در مورد دادههای فضایی مختلف و ناهمگن به روشی یکپارچه و بصری فراهم کنند و به ما امکان تجزیه و تحلیل و درک بهتر پدیدهها و پویاییهای محیطی را بدهیم [ ۸ ، ۹ ]. به طور خاص، استفاده از یک DSS مبتنی بر GIS راه را برای تعامل دوستانه با داده های ذرات جمع آوری شده در منطقه شهری باز می کند. این به ما اجازه می دهد، به عنوان مثال، مجموعه های تاریخی را در یک مکان معین نمایش دهیم یا سایر اطلاعات جغرافیایی مرتبط در منطقه را به روشی تعاملی، مانند [ ۹ ، ۱۰ ] بازرسی کنیم.]. DSS همچنین می تواند به طور موثر از تکنیک های تجزیه و تحلیل تصمیم چند معیاره GIS (MCDA) و تکنیک های مبتنی بر فرآیند تحلیل سلسله مراتبی (AHP) پشتیبانی کند تا امکان تجسم و تفسیر توزیع فضایی اثرات آلودگی هوا را فراهم کند [ ۱۱ ]. در روشهای دیگر [ ۱۲ ]، برنامههای مبتنی بر GIS برای پشتیبانی از بهترین مکانیابی شبکههای پایش و ارزیابی کیفی بازنمایی فضایی انتشار آلایندهها و تنوع استفاده شد. در نهایت، روشهای سهبعدی میتوانند قابلیتهای تجسم را بهبود بخشند و به ما اجازه میدهند تا انتشار را با محاسبه حجمهای مرئی و مسدود شده ارزیابی کنیم [ ۱۳ ].
در بخش ۲ ، بخش های مختلف تشکیل دهنده سیستم کلی توضیح داده شده است. به طور خاص، در بخش فرعی اول، LCSها با تمرکز خاصی بر حسگر مورد استفاده در این کار نشان داده شدهاند. در بخش دوم، ویژگیهای SR و موارد مربوط به وظیفه نظارت بر هوا توضیح داده شده است. در بخش سوم، سیستم CIPCast مبتنی بر GIS توضیح داده شده است. مشخصات اولیه سنسور در بخش چهارم ارائه شده است. در زیر بخش پنجم، کمپین اکتساب داده توضیح داده شده است و در زیربخش ششم، پردازش داده ها به صورت متمرکز در DSS مبتنی بر GIS توضیح داده شده است.
در بخش ۳ ، نتایج این فعالیت ها گزارش شده است. در بخش ۴ ، بحث مختصری ارائه شده است و در بخش ۵ نتیجه گیری و برخی نظرات ما همراه با جهت گیری های تحقیقاتی آتی ارائه شده است.
۲٫ مواد و روشها
۲٫۱٫ سنسورهای کم هزینه
در سالهای اخیر، کوچکسازی، سایر پیشرفتهای تکنولوژیکی و کاهش هزینهها تعدادی حسگر ارزان قیمت را به بازار آورده است که برای اندازهگیری گازهای جوی و ذرات معلق طراحی شدهاند. این فراوانی باعث پذیرش LCS توسط مقامات دولتی و ابتکارات علمی شهروندی شده است [ ۱۴ ]]. اگرچه LCS نمیتواند جایگزین روشهای مرجع سنتی شود، این حسگرها فرصتهای جدیدی را برای گسترش دسترسی به پایش کیفیت هوای محیط برای کاربردهایی مانند سلامت شخصی و ارزیابی کیفیت هوای منطقهای ایجاد کردهاند، بهعنوان مثال، جمعآوری دادههای سطح همسایگی برای نشان دادن مسائل مربوط به کیفیت هوا. جوامع محلی. علاوه بر این، استفاده از روشهای مرجع استاندارد مستلزم استفاده از اپراتورهای ماهر برای تعمیر و نگهداری و کالیبراسیون است، در حالی که LCSها که نیازی به افراد ماهر ندارند، امکان استفاده گستردهتر را باز میکنند [ ۱۵ ، ۱۶ ].
حتی اگر در دسترس بودن LCS به طور چشمگیری افزایش یافته باشد، تحقیقات در مورد استفاده از این انبوه داده از نظر پردازش، تجسم و تفسیر همچنان ادامه دارد. علاوه بر این، توصیف این حسگرها با توجه به شرایط محیطی در حال تغییر هنوز موضوع مطالعه است و تحقیقات مربوط به پیری حسگر هنوز یک موضوع بسیار باز است [ ۱۷ ].
دقت و قابلیت اطمینان به موضوعات تحقیقاتی یکپارچه تبدیل شده اند. چندین مقاله منتشر شده است که LCS های مختلف را آزمایش کرده و عملکرد آنها را مقایسه کرده است [ ۱۸ ]. پروتکل هایی برای چنین آزمایشاتی توسط موسسات تحقیقاتی مختلف در غیاب یک استاندارد بین المللی پذیرفته شده ایجاد شده است.
نشانه های واضحی وجود دارد که دقت LCS ها در مقایسه با اندازه گیری های مرجع ممکن است پایین باشد. منبع اصلی عدم دقت به گزینش پذیری پایین حسگرهای گاز مرتبط است که ممکن است جریان الکترون های تولید شده توسط واکنش های ردوکس مختلف از گونه های مختلف گاز (حساسیت متقاطع) را اندازه گیری کنند. علاوه بر این، کالیبراسیون در برخی از شرایط مرجع انجام میشود که ممکن است هنگام استفاده در ترکیب هوا یا شرایط جوی متفاوت، تعصب ایجاد کند. با توجه به حسگرهای ذرات، اینها پراکندگی نور را اندازه گیری می کنند که تحت تأثیر چگالی ذرات و رطوبت سنجی است [ ۱۹ ].
یک مسئله دیگر، پیری است. سنسورهای الکتروشیمیایی که غلظتهای شیمیایی را اندازهگیری میکنند، معمولاً بین ۱۲ تا ۱۸ ماه طول عمر دارند، اما تحقیقات بسیار محدودی در مورد رفتار تخریب غیرقابل برگشت آنها وجود دارد. حسگرهای ذرات معلق از یک روش فیزیکی، پراکندگی نور، برای محاسبه غلظت استفاده می کنند. این امکان طول عمر بیشتر سنسور و بازنشانی احتمالی به شرایط نزدیک به کارخانه با کمی تمیز کردن را فراهم می کند.
در این مطالعه، به منظور نشان دادن سیستم نظارتی پیشنهادی، از یک حسگر ذرات نوری استفاده شد: Alphasense OPC-N2، که در [ ۲۰ ] ارزیابی و مورد بحث قرار گرفته است. دلایل چنین انتخابی، طول عمر بیشتر سنسور ذکر شده در بالا، ویژگی های آن، و مشاهده اینکه محتوای ذرات یکی از اقدامات اساسی است که توسط مدیریت شهری برای تصمیم گیری در مورد محدودیت های ترافیکی یا بلوک ها استفاده می شود.
حسگرهای ذرات معلق نسبت به رطوبت نسبی بالای محیط (RH > 85%) حساس هستند و در [ ۲۰ ] اصلاح زیر معرفی شد:
جایی که RH/100 است و k پارامتری است که درجه رطوبت سنجی یک ذره را توصیف می کند که به ترکیب ذره بستگی دارد و حدود ۰٫۳ ÷ ۰٫۴ است.
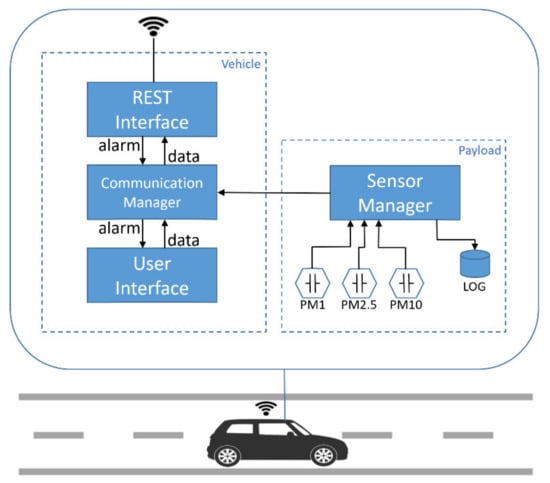
سیستم مانیتورینگ مورد استفاده در این کار در شکل ۱ نشان داده شده است(پانل سمت چپ). توانایی تشخیص چندین ترکیب شیمیایی، ذرات (در سه اندازه PM-1، PM-2.5 و PM-10) و برخی پارامترهای فیزیکی جوی مانند دما، رطوبت و فشار را دارد. در عین حال، مجهز به سنسور GPS است، بنابراین مقادیر جغرافیایی ارجاع داده می شود. یک کامپیوتر Raspberry Pi تک بردی از بازجویی حسگرها مراقبت می کند و با اجرای یک سرویس وب که می تواند از راه دور به آن دسترسی داشته باشد یا ممکن است به طور مستقل داده ها را پخش کند، داده ها را از طریق اتصال اینترنت Wi-Fi در اختیار کاربر نهایی قرار می دهد. ابعاد دستگاه حدود ۱۰ × ۱۷ × ۹ سانتی متر و وزن آن حدود ۵۰۰ گرم است. به منبع برق در محدوده ۷ تا ۳۶ ولت و حدود ۳ وات برق نیاز دارد. دستگاه از طریق سوراخ کابل روی سقف وسیله نقلیه بر روی وانت آزمایشگاهی نصب شد ( شکل ۱ را ببینید، پانل سمت راست) به منظور مدل سازی جمع آوری داده های واقعی توسط چندین دستگاه در وسایل نقلیه مختلف.
۲٫۲٫ جاده هوشمند
جاده هوشمند (SR) یک مفهوم نسبتا مبهم است که در سال های اخیر پس از موج هوشمند در کانون توجه قرار گرفته است. ما به مفاهیم شهرهای هوشمند، مناطق هوشمند، ساختمان های هوشمند و خانه های هوشمند عادت کرده ایم. همه آنها ایده محاسبات فراگیر را توصیف می کنند. به عبارت دیگر، تمام بخشهای زندگی مدرن را میتوان با کمک مقداری قدرت پردازش، قابلیتهای ارتباطی و بالاتر از همه دادهها هوشمند کرد. محرک (و در عین حال اثر) این موج هوشمند، به اصطلاح اینترنت اشیا (IoT) است، یعنی امکان تجهیز تقریباً هر دستگاه الکترونیکی به قدرت های ارتباطی و تشریحی، همراه با کاهش روزافزون هزینه های محاسباتی. قدرت و حافظه ذخیره سازی
یک جاده معین را می توان از چندین جنبه مختلف هوشمند کرد و در حالی که این ایده به روش های مختلف در مکان های مختلف نمونه سازی و اجرا شده است، به طور نزدیک با چارچوب سیستم حمل و نقل هوشمند (ITS) مرتبط است [ ۲۱ ]. پیشنهاد این است که حمل و نقل و تحرک باید به عنوان یک سیستم یکپارچه و مهمتر از همه پویا در نظر گرفته شود که در آن کنترل، اطلاعات و مدیریت به صورت هم افزایی و همزمان عمل می کنند [ ۲۲ ].
به عنوان مثال، در سوئد SR به عنوان شکلی از زیرساخت ها در نظر گرفته می شود که می تواند وسایل نقلیه الکتریکی را در حالی که روی آن حرکت می کنند شارژ کند [ ۲۳ ، ۲۴ ]. در ایتالیا، مدیر اصلی جاده، ANAS، در حال حاضر برخی از بخشهای شبکه جادهای ایتالیا را با رویکردی مبتنی بر ایمنی سفر هوشمند میکند. آنها چراغ های خیابان های کنار جاده را به حسگرها و با یک شبکه بی سیم برای ارتباط با اتومبیل ها و مسافران برای هشدارهای مربوط به ترافیک و نظارت بر وضعیت جاده مجهز می کنند [ ۲۵ ].
نویسندگان در حال حاضر در پروژه ای برای راه اندازی یک SR آزمایشی به منظور مطالعه برنامه ها و راه حل ها برای کیفیت بهتر زندگی و صرفه جویی در انرژی شرکت دارند [ ۲۶ ]]. از طریق یک شبکه ارتباطی بی سیم که در لامپ های کنار جاده قرار دارد، کاربران نهایی (وسایل نقلیه، دوچرخه سواران و عابران پیاده) می توانند با مرکز محاسبات شهر هوشمند گفتگو کنند. این مبادله داده های مربوطه را برای سرویس ها و برنامه های مختلف منتقل می کند. به عنوان مثال، یک وسیله نقلیه ممکن است اطلاعاتی را در زمان واقعی به دست آورد که نمی تواند به طور مستقیم و محلی به آنها دسترسی پیدا کند، به عنوان مثال، یک وضعیت هشدار در مسیر برنامه ریزی شده یا یک هشدار هواشناسی از نوعی. علاوه بر این، خودرو میتواند دستورالعملهای مربوط به شارژ مجدد خود را دریافت کند، به عنوان مثال، مکان و زمان، مطابق با وضعیت کلی شبکه برق و خواستههای خود خودرو، مانند نزدیک بودن به مقصد سفر. بنابراین SR یک پیوند ارتباطی بین قدرت مرکزی شهر و کاربر نهایی است که می تواند در معکوس نیز استفاده شود. راه مرکزگرا هر کاربر نهایی میتواند دادههای بهدستآمده را با حسگرهای حس عمقی (مثلاً موقعیت، سرعت، شارژ باتری) یا حسگرهای برونشناختی (مانند دمای هوا، آلودگی، شرایط سطح جاده) که بهعنوان یک دستگاه حسگر متحرک عمل میکنند و جزئیات توصیف را افزایش میدهند، ارائه دهد. وضعیت فعلی شهر که درشکل ۲ موردی را نشان می دهد که در آن یک وسیله نقلیه داده های مربوط به ذرات معلق را ارائه می دهد.
در مرکز تحقیقات Casaccia (رم)، SR در حال ساخت است. حدود ۷۰۰ متر طول می کشد و از ۲۲ چراغ خیابان تشکیل شده است. هر قطب مجهز به یک لامپ LED قابل کنترل از راه دور است و همچنین ممکن است به یکی از سنسورهای ثابت زیر مجهز باشد: حسگر نویز، سنسور CO ۲ ، یا سنسور ذرات و دوربینی که می تواند به طور مستقل سطح روشنایی را از طریق یک دستگاه کنترل کند. رویکرد TAI/FAI (TAI، نصب تطبیقی ترافیک، که روشنایی را بر اساس شدت ترافیک کنترل میکند؛ FAI، نصب کامل تطبیقی، که همچنین کنترل روشنایی را بر اساس شرایط آب و هوایی اضافه میکند).
در پای تیرهای خیابان یک پیوند فیبر وجود دارد و سه نقطه دسترسی (APs) با آن ارتباط دارند: یکی در ابتدای جاده، یکی در وسط جاده و دیگری در انتهای دیگر جاده. در جاده هوشمند، یک وسیله نقلیه الکتریکی آزمایشی در گردش است که چندین حسگر را برای توصیف محیط شهری حمل می کند. به خاطر مقاله حاضر، محموله پایش هوا را که در پایان بخش ۲٫۱ توضیح داده شده است، حمل می کند .
در این کار، LCS دستگاه IoT را نشان میدهد که دادههای خود را به مرکز پردازش مرکزی شهر برای یکپارچهسازی دادههای جمعآوریشده از سیستمهای ثابت رسمی برای درجه بالاتری از جزئیات در نظارت بر آلایندههای هوا منتقل میکند. ایده این است که برخی از وسایل نقلیه در شهر مجهز به سیستم پایش آلاینده هوا هستند. این سیستم محتوای ذرات معلق را در یک فرکانس مشخص بررسی می کند و سپس به طور خودکار داده ها را به مرکز مرکزی شهر ارسال می کند. سیستم نمونه اولیه کوچک و سبک است و تقریباً بر روی هر وسیله نقلیه ای قابل نصب است. با این حال، در شرایط عملیاتی، بیشتر ممکن است بر روی اتوبوس های حمل و نقل عمومی یا سایر وسایل نقلیه خدماتی شهرداری نصب شود. بنابراین، شهر دادهها را از سیستمهای مختلف تلفن همراه جمعآوری میکند و دادهها را هم به صورت مکانی و هم زمانی درونیابی میکند.
LCS انتخاب شده Alphasense OPC-N2 است که روی محموله نظارت بر هوا نصب شده و میزان ذرات اتمسفر را اندازه گیری می کند. از طریق Raspberry Pi محموله، دادههای زیر قابل بازیابی هستند: مختصات جغرافیایی، زمان، دما، فشار هوا، رطوبت، PM1، PM2.5، PM10، و برخی دادههای داخلی (شمارش سطل OPC-N2). بار کل حدود ۳۰۰ بایت با فرکانس اکتساب ۰٫۵ هرتز است، یعنی هر دو ثانیه یک بار. بنابراین، توان عملیاتی داده بسیار کم است. در SR کاملاً مستقر شده، پیوند Wi-Fi ممکن است پیوسته در نظر گرفته شود. در حال حاضر، محموله قادر است داده ها را به صورت محلی بافر کند و هر زمان که یک AP وای فای در دسترس قرار گرفت، آنها را انتقال دهد. از آنجایی که جاده هوشمند Casaccia هنوز کامل نشده است، کمپین تجربی توصیف شده در یک منطقه شهری برای نشان دادن امکان سنجی رویکرد تصور شده انجام شد. در طول کمپین آزمایشی، داده ها روی دستگاه ذخیره می شد و فقط در پایان دانلود می شد.
۲٫۳٫ پلتفرم CIPCast
پلت فرم CIPCast یک DSS مبتنی بر GIS است که توسط ENEA برای پشتیبانی از نظارت، تجزیه و تحلیل ریسک و مدیریت زیرساختهای شهری طراحی و توسعه یافته است [ ۷ ]. این شامل و مدیریت بیش از ۴۰۰ لایه داده های مکانی برای تجزیه و تحلیل فضایی، حفاظت از زیرساخت ها، و افزایش انعطاف پذیری دارایی های شهری است. علاوه بر این، CIPCast الگوریتمها و رویههایی را برای فرآیندهای تصمیمگیری چند معیاره به منظور حمایت از نظارت تعاملی، برنامهریزی شهری و تصمیمگیری پیادهسازی میکند [ ۲۷ ، ۲۸ ، ۲۹ ، ۳۰ ، ۳۱ ].
CIPCast با زیرساخت SR تعامل می کند تا تجزیه و تحلیل ریسک را به دلیل رویدادهای طبیعی شدید، نقص ها یا هشدارهایی که با استفاده از سنسورها یا حسگرهای توزیع شده در محل شناسایی شده اند انجام دهد. در حالت دوم، میتواند دادههای وسایل نقلیه را دریافت و ادغام کند، مانند مکان، وضعیت و دادههای کیفیت هوای مکانیسازیشده و پردازششده، برای ارائه نقشهها و ایجاد هشدار.
همه توابع فوق از طریق رابط جغرافیایی تعاملی CIPCast قابل دسترسی هستند، یک برنامه WebGIS که نمایانگر گرافیکی جلویی [ ۳۱ ] داده ها و اطلاعات ارائه شده و/یا تولید شده است.
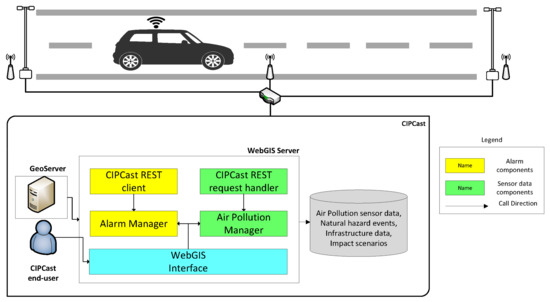
شکل ۳ نموداری از معماری نرم افزار CIPCast را نشان می دهد که می تواند بر اساس پارادایم مدل View Controller (MVC) نمایش داده شود:
- –
-
مدل : این شامل پایگاه داده ای است که داده های میدانی به دست آمده از حسگرهای مختلف و نتایج تحلیل ریسک را ذخیره می کند. چنین داده هایی با زمان اکتساب، سنسور و غلظت مشخص می شوند.
- –
-
نمایش : این رابط گرافیکی کاربر (GUI) را فراهم می کند که می تواند کاربر نهایی را با ارائه مجموعه ای از لایه های GIS (به عنوان مثال، داده های میدانی، سناریوهای تاثیر) و توالی زمان واقعی رویدادها در یک پنجره جدول زمانی، پشتیبانی کند. ; و
- –
-
کنترلر : این نشان دهنده اجزای نرم افزاری است که مسئول دریافت داده های حسگر از وسیله نقلیه و بالا بردن آلارم در هنگام تجاوز از آستانه غلظت آلودگی هستند. ارتباط بین CIPCast و وسیله نقلیه از طریق استفاده از خدمات وب REST انجام می شود. به طور خاص، کنترل کننده درخواست REST و مشتری REST به ترتیب اجزایی را نشان می دهند که مسئول به دست آوردن داده های حسگر و ارسال آلارم به خودرو هستند.
به منظور مدیریت و پردازش دادههای جمعآوریشده توسط LCS، CIPCast با عناصر خاصی از جاده هوشمند (SR)، که توسط لامپهای کنار جاده نمایش داده میشود، تعامل دارد. وسایل نقلیه در حال گردش در SR از طریق نقاط دسترسی نصب شده بر روی برخی لامپ ها به شبکه متصل می شوند و بنابراین می توانند داده ها را از LCS به طور مستقیم از طریق پروتکل های TCP/IP با استفاده از پیام های JSON که اطلاعات مربوطه را حمل می کنند به CIPCast منتقل کنند. پیوست A نمونه ای از چنین پیامی را نشان می دهد.
۲٫۴٫ پردازش داده های تجربی اولیه: مشخصه سنسور
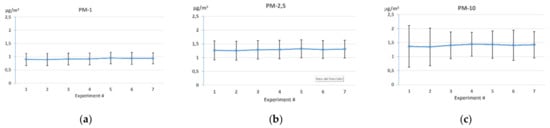
برخی از اندازه گیری های اولیه قبل از کمپین آزمایشی واقعی انجام شد. در جزئیات، ارزیابی پایداری اقدامات انجام شد. PM LCS در یک اتاق بسته بدون تهویه قرار داده شد و یک سری اقدامات جمع آوری شد. این کار به منظور اندازه گیری سنسور یک سیگنال پایدار، بدون تغییر به دلیل تهویه انجام شد، که تا حد زیادی بر محتوای ذرات تأثیر می گذارد. در هر آزمایش، سیستم محتوای ذرات را به طور متوسط به مدت ۱۵ دقیقه با یک مبنا هر دو ثانیه یک بار اندازه گیری کرد. مقادیر متوسط با انحراف معیار برای هفت آزمایش انجام شده در شکل ۴ گزارش شده استبرای سه گونه ذرات PM-1، PM-2.5، و PM-10. دو مشاهده می توان انجام داد. در هر نمودار، انحرافات استاندارد بسیار مشابه هستند و اندازه گیری اساساً در بازه زمانی حدود دو ساعت یکسان است، که پایداری اندازه گیری های دستگاه را نشان می دهد. اگر ضریب واریانس، یعنی نسبت بین انحراف معیار و مقدار میانگین محاسبه شود، مقادیر به دست آمده به ترتیب برای PM-1، PM-2.5 و ۰٫۲۴ ± ۰٫۰۱، ۰٫۲۶ ± ۰٫۰۱ و ۰٫۳۴ ± ۰٫۰۲ و PM-10. این مقادیر با مقادیر [ ۲۰ ]، که در آن چندین حسگر Alphasense OPC-N2 با هم مقایسه می شوند، مطابقت خوبی دارند.
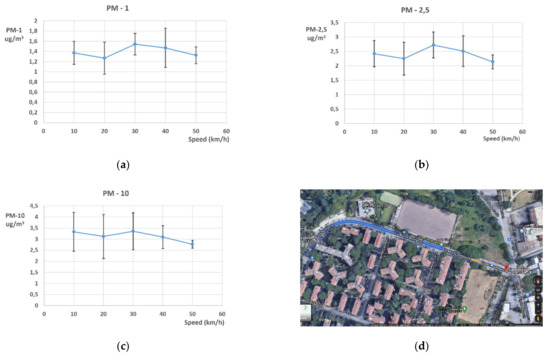
هنگامی که ما در منطقه جغرافیایی که در آن کمپین انجام شد بودیم و زمانی که LCS را روی ون سوار کردیم، قبل از آزمایش واقعی، مجموعه ای از اندازه گیری ها را انجام دادیم تا تغییرپذیری سیگنال را با توجه به سرعت بررسی کنیم. وسیله نقلیه. LCS به کار گرفته شده دارای یک فن کوچک است که جریان کم و بیش ثابت هوا را در سنسور تضمین می کند. از آنجایی که LCS روی یک وسیله نقلیه در حال حرکت نصب شده بود، تعیین اینکه آیا شار هوای ناشی از حرکت وسیله نقلیه بر اندازهگیریها تأثیر میگذارد یا خیر، جالب است.
به منظور بررسی این موضوع، ون در خیابانی کم تردد رانده شد، با تکرار مسیر، یعنی همان سمت خیابان و همان جهت، اما با سرعت های متفاوت که توسط ابزار دقیق وسیله نقلیه نشان داده شده است. سرعت های در نظر گرفته شده ۱۰، ۲۰، ۳۰، ۴۰ و ۵۰ کیلومتر بر ساعت بود. در بین تمام دادههای PM ثبتشده، تنها آنهایی که با سرعت صحیح ثبت شدهاند حفظ شدند، یعنی فازهای شتاب و کاهش سرعت حذف شدند. شکل ۵میانگین و انحراف استاندارد داده های اندازه گیری شده را به عنوان تابعی از سرعت برای سه مقدار PM نشان می دهد. اقدامات بسیار مشابه هستند و به میزان قابل توجهی استقلال از سرعت خودرو اشاره می کنند. برای PM-10، بالای ۳۰ کیلومتر در ساعت، انحراف استاندارد کاهش مییابد، که نشاندهنده پایداری بهتر در سرعتهای بالاتر است، که احتمالاً به جریان هوای پایدارتر در اطراف ون مرتبط است. با این فرض که محتوای PM تا حد زیادی ثابت است، باید تاکید کرد که خیابان مورد استفاده حاشیه ای بود و تقریباً هیچ ترافیکی نداشت. با این وجود، مقداری تنوع در محتوای PM همیشه میتواند در سریهای آزمایشی مختلف وجود داشته باشد، زیرا اندازهگیریها در زمانهای مختلف انجام شدهاند. اندازهگیریها در یک پنجره زمانی کمتر از ۵ دقیقه به منظور محدود کردن تغییرات در کمیت اندازهگیری شده تا حد امکان انجام شد.
۲٫۵٫ کمپین آزمایشی
برخی از جمع آوری داده های تجربی با نصب سیستم بر روی سقف یک وسیله نقلیه و راندن آن در رم در همسایگی یکی از تحلیلگرهای ثابت آلودگی هوا که توسط شهرداری مستقر شده است، انجام شد. مسیرهای متعددی که از منطقه عبور می کردند ثبت شد. داده ها غلظت ذرات و مختصات GPS است که هر دو ثانیه در مسیر خودرو ثبت می شود. مسیرهای مختلف در شکل ۶ ب ترسیم شده است.
دادهها از طریق نرمافزار روی برد با نظرسنجی از همه سنسورها ثبت شد، در حافظه انبوه روی برد (یک کارت SD) ذخیره شد و در پایان از طریق بازجویی Wi-Fi REST از سیستم دانلود شد.
دادههای ثبتشده به منظور شبیهسازی ثبت معاصر دادههای جمعآوریشده توسط چندین وسیله نقلیه مختلف، که هر کدام به یک حسگر مجهز هستند، بازآرایی شدند، همانطور که با نقاط رنگی در شکل ۶ نشان داده شده است . تعداد وسایل نقلیه شبیهسازیشده ۱۰ است. به منظور حذف برخی نقاط پرت در دادههای اندازهگیری شده، یک آستانه در ۸۰ میکروگرم بر متر مکعب قرار داده شد و یک میانگین متحرک مرکزی، پنجره نمونه ۵، برای کاهش نویز استفاده شد. حتی اگر رطوبت نسبی در حین جمع آوری داده ها کم بود، داده ها نیز مطابق با رابطه (۱) تصحیح شدند.
در جدول ۱ داده های مربوط به ۱۰ وسیله نقلیه شبیه سازی شده ارائه شده است. ضبط داده ها با حرکت وسیله نقلیه با میانگین سرعت ۱۷٫۳ کیلومتر در ساعت با حداقل ۱۰٫۸ کیلومتر در ساعت و حداکثر ۲۰٫۶ کیلومتر در ساعت انجام شد. تراکم نسبی نمونه به طور متوسط ۹۹٫۶ نمونه در کیلومتر با حداقل ۸۶٫۷ نمونه در کیلومتر و حداکثر ۱۲۸٫۶ نمونه در کیلومتر بسته به سرعت بود. طول کل سفر حدود ۱۴٫۱ کیلومتر در ۴۸:۳۸ بوده و با ۱۳۹۸ نمونه ثبت شده که جمعاً ۵۸۴ کیلوبایت داده است، همانطور که در سمت راست ترین ستون نشان داده شده است.
همانطور که در بالا ذکر شد، یکی از مشکلات مربوط به LCS ها پیری است. سنسورهای ذرات معلق در مقایسه با سنسورهای شیمیایی کمتر در معرض این مشکل هستند. پیری سنسور می تواند با کاهش قابلیت اطمینان اندازه گیری مرتبط باشد. بنابراین، یک قانون ساده برای توصیف این کاهش با زمان از آخرین کالیبراسیون سنسور ابداع شد. فرض بر این است که قابلیت اطمینان سنسور تابعی خطی از زمان است:
جایی که قابلیت اطمینان سنسور هنگام کالیبره شدن است، k یک ثابت آزمایشی است که باید ارزیابی شود، و t زمان از آخرین کالیبراسیون است. برای نشان دادن این ایده، سنهای مختلفی به سنسورهای شبیهسازیشده مختلف اختصاص داده شد، از ۱ (برای یک سنسور جدید یا جدید کالیبرهشده) تا ۵ سال، با کاهش قابلیت اطمینان با k = ۰٫۰۵ و t اندازهگیری شده در سال. . به عبارت دیگر، هر حسگر شبیهسازیشده در مسیر، غلظت ذرات معلق را اندازهگیری میکند و آنها را به DSS مبتنی بر GIS برای پردازش بیشتر همراه با زمان آخرین کالیبراسیون حسگر منتقل میکند.
۲٫۶٫ پردازش داده مبتنی بر GIS
رویکرد مبتنی بر GIS مورد استفاده در مطالعه موردی حاضر برای پردازش پارامترهای کیفیت هوای اندازهگیری شده، امکان ارزیابی فضایی و تعیین حدود مناطق با ویژگیهای مشابه (سطوح تمرکز، ویژگیهای آماری دادههای اندازهگیریشده، و غیره) را فراهم میکند [ ۱۲ ]. علاوه بر ارزیابی بازنمایی فضایی اندازهگیریهای آلاینده هوا، پردازش مبتنی بر GIS میتواند ابزارهایی برای مدلسازی غلظت آنها فراهم کند [ ۳۲ ].
داده های آلاینده (به عنوان مثال، PM-1، PM-2.5 و PM-10) اندازه گیری شده توسط LCS نصب شده در داخل خودرو و ارسال به CIPCast شامل یک سری نقاط جغرافیایی مرجع همراه با ویژگی های آنها است. هنگامی که این داده ها توسط CIPCast به دست آمد، آنها به یک فرمت استاندارد GIS تبدیل می شوند. از این رو، برنامه WebGIS قادر به مدیریت آنها است و به ما امکان می دهد اطلاعات به دست آمده را در هر نقطه جستجو و نمایش دهیم، که در یک پنجره بازشو حاوی تمام ویژگی های توصیفی موجود (مهر زمانی، ویژگی های حسگر، طول و عرض جغرافیایی، آلاینده) نشان داده شده است. غلظت، دما و غیره).
متعاقباً، CIPCast دادههای نقطهای ارسال شده توسط حسگرها را پردازش میکند تا نقشههای درونیابی غلظت ذرات تولید کند. روشهای درونیابی متعددی موجود است: یک مرور کلی و بحث در [ ۳۳ ] و [ ۳۴ ارائه شده است.]. با این وجود، متداول ترین روش های مورد استفاده (روش وزن دهی معکوس فاصله، روش کریجینگ معمولی و روش اسپلاین) که ثابت شده است نتایج قابل اعتماد و پیوسته مکانی را ارائه می دهند، معمولاً در مجموعه نرم افزارهای اصلی GIS پیاده سازی می شوند. در مطالعه موردی حاضر، داده ها با استفاده از شاخص قابلیت اطمینان فوق الذکر (معادله (۲))، یعنی درونیابی وزنی داده ها بر اساس سن سنسور در نظر گرفته شد. با توجه به توزیع مکانی-زمانی حسگرها و ویژگیهای ناحیه تحت نظارت، دادهها با استفاده از درونیابی انتشار با موانع ارائهشده توسط مجموعه ESRI ArcGIS [ ۳۵ ] پردازش شدند.]. درون یابی انتشار به حل اساسی معادله گرما اشاره دارد که چگونگی انتشار گرما یا ذرات با زمان در یک محیط همگن را توصیف می کند. چنین پیشبینی میتواند به آرامی در اطراف موانعی مانند ساختمانهای مورد حاضر جریان یابد. با توجه به ویژگیهای سطح، نقش کاهشدهنده احتمالی مناطق سبز شهری در نظر گرفته نشد، زیرا بررسیها در محلهای متراکم ساخته شده انجام شد.
داده های جمع آوری شده از وسایل نقلیه در یک پنجره زمانی ۱۰ دقیقه در نظر گرفته می شود. این بدان معنی است که تمام داده ها با درون یابی با ویژگی های زمان-از-آخرین کالیبراسیون خود در داخل پنجره ۱۰ دقیقه مطابقت دارند. هر گونه داده جمع آوری شده پس از این پنجره زمانی تجزیه و تحلیل می شود و بخشی از پنجره زمانی بعدی خواهد بود. بنابراین، تکامل زمانی کیفیت هوا شش بار در ساعت ارزیابی میشود.
۳٫ نتایج
نتیجه اصلی کار حاضر با تعریف یک روش شناسی چند وجهی برای ارزیابی کیفیت هوا در یک بافت شهری نشان داده شده است. ما سیستمی متشکل از یک دستگاه سبک وزن مجهز به LCS برای اندازه گیری ذرات معلق، یک زیرساخت شهری برای رله داده ها در بین کاربران نهایی، اعم از وسایل نقلیه یا انسان، یک مرکز مرکزی (یک جاده هوشمند) و یک GIS ارائه کرده ایم. سیستم پشتیبانی تصمیم مبتنی بر (سکوی CIPCast-ER) قادر به پردازش دادههای بلادرنگ با هدف احتمالاً صدور هشدارهای محلی در مورد کیفیت هوا است.
نقشه برداری ذرات معلق
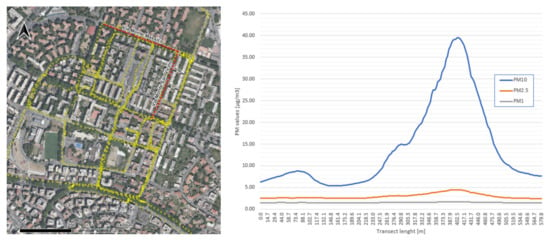
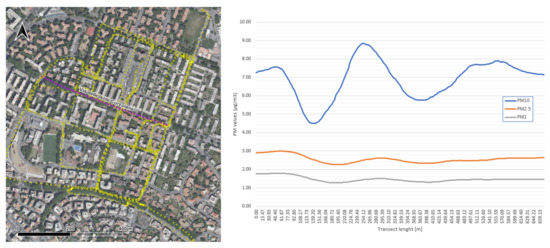
دادههای مربوط به بررسیهای PM که از حسگرها به دست میآیند و به CIPCast ارسال میشوند، در محیط GIS همانطور که در بخش قبل توضیح داده شد، پردازش میشوند. سپس، نقشه های درون یابی PM، همانطور که در شکل ۷ نشان داده شده است، تولید می شوند و به عنوان لایه های GIS در پایگاه داده جغرافیایی CIPCast ذخیره می شوند. در شکل ۷ ، نواحی چند ضلعی سفید مربوط به ساختمان هایی است که در طول فرآیند درونیابی به عنوان موانع در نظر گرفته می شدند. در اینجا می توان مشاهده کرد که در قسمت سمت راست بالای نقشه برای PM-10 وضعیت غیرعادی وجود دارد که در نقشه PM-2.5 نیز تایید شده است.
برای این منظور، می توان یک خط بر روی نقشه تجسم شده ترسیم کرد و یک ترانسکت تعریف کرد که از آن مقادیر PM را در نقشه درون یابی شده به دست آوریم و سپس آنها را در یک نمودار نشان دهیم. به عنوان مثال، در مورد حاضر دو ترانسکت ترسیم شد. در شکل ۸ و ۹ نمودارها با روندهای مختلف PM در امتداد هر ترانسکت تعریف شده گزارش شده است.
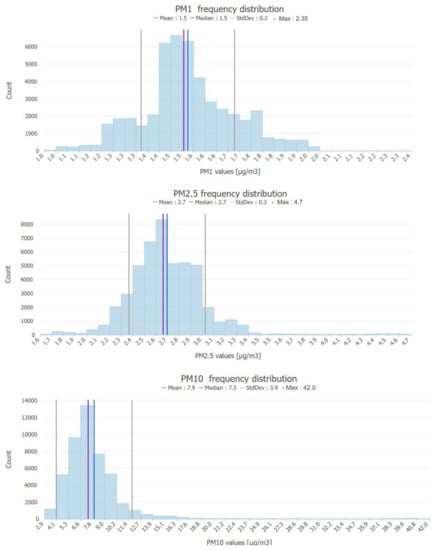
در نهایت، با در نظر گرفتن توزیع مقادیر PM در لایه های نگاشت شده، برنامه کاربردی می تواند آمارهای اساسی مانند آنچه در شکل ۱۰ گزارش شده است را محاسبه کند.
مهم است که تأکید شود که این دادهها در زمان واقعی یا تقریباً زمان واقعی هستند، که امکان مطالعه دقیقتر آلایندهها و امکان صدور هشدارهای مربوط به سلامت را برای جمعیت محلی فراهم میکند.
کمپین آزمایشی ارائه شده در اینجا نسبت به یک پنجره زمانی منفرد ۱۰ دقیقهای است، اما میتوان آن را به طور مکرر برای پیگیری تکامل زمانی محتوای ذرات انجام داد، زیرا SR به طور مداوم دادهها را به پلت فرم CIPCast ارسال میکند و شش ارزیابی وضعیت آلودگی را امکانپذیر میکند. در ساعت.
برای مقایسه، دادههای رسمی ARPA موجود از ایستگاه پایش ثابت محلی، یک مقدار متوسط را در کل روز ۱۸ میکروگرم بر متر مکعب فقط برای محتوای PM-10 گزارش میکنند. دادههای گزارششده در اینجا، علاوه بر تجزیه و تحلیل محتوای PM-1 و PM-2.5، نسبت به یک پنجره زمانی ۱۰ دقیقهای در حدود ساعت ۱۱ صبح است و برای محتوای PM-10 مقدار متوسطی در حدود ۱۲ میکروگرم در متر ارائه میکند. ۳ نزدیک ایستگاه ARPA.
۴٫ بحث
ایده اصلی ارائه شده در این مقاله مربوط به در دسترس بودن یک مجموعه داده بسیار بزرگتر از آنچه معمولاً در دسترس است، جمع آوری شده با سیستم های نظارت سیار سبک و کوچک است. این، همراه با امکان بهرهبرداری از یک DSS مبتنی بر GIS برای پردازش دادهها در زمان واقعی، امکان پایش کیفیت هوا در یک منطقه شهری را به روشی دقیقتر و مستمر فراهم میکند.
در بسیاری از برنامهها، در دسترس بودن حجم زیادی از دادهها، حتی اگر از کیفیت پایینتری برخوردار باشند، سهمی بیاهمیت در توصیف یک وضعیت دارد. مفهوم ادغام داده ها در بسیاری از کاربردهای مختلف نمونه ای از این رویکرد است. برای تخمین اندازهگیری، چندین حسگر مختلف با ویژگیها و دقتهای مختلف را میتوان مورد بهرهبرداری قرار داد، که همگی در درجات مختلف به مقدار نهایی کمک میکنند [ ۳۶ ، ۳۷ ].
نتایجی که در اینجا گزارش شده است، قابلیت چنین رویکردی را برای جمعآوری دادههای سطح محله تقریباً در زمان واقعی نشان میدهد، که امکان وضوح داده بالاتر را فراهم میکند.
در حال حاضر، دادهها در یک پنجره زمانی معین (معمولاً ۱۰ دقیقه) ذخیره میشوند و مدت زمان معمول پردازش به ترتیب ۱۰ ثانیه است. به عبارت دیگر، تمام اندازهگیریهای خودروهای مختلف در این پنجره زمانی به صورت همزمان در نظر گرفته میشوند و در نتیجه به صورت مشترک پردازش میشوند.
چندین مطالعه [ ۳۸ ، ۳۹ ، ۴۰ ] آلودگی شهری را با سکوهای متحرک با اجزای اصلی یکسان اندازهگیری کردهاند: یک وسیله نقلیه، برخی حسگرها، یک واحد GPS و نیروی باتری، و دادههایی را در مسیرهای از پیش تعریفشده برای مدت زمان محدودی جمعآوری کردهاند. . در [ ۴۱ ، ۴۲ ]، واحدها بر روی وسایل نقلیه خدمات شهرداری نصب شده بودند و برای جمع آوری مقادیر زیادی از داده ها در هر روز استفاده می شدند (همچنین به [ ۴۳ ] مراجعه کنید).
با توجه به کارهای مرتبط قبلی (نگاه کنید به [ ۴ ] و ارجاعات موجود در آن)، سیستم ارائه شده در اینجا، که از بخش های سنجش، ارتباط و پردازش تشکیل شده است، دارای نقاط قوت زیر است.
این اتصال مستقیم سنسورها به توان تفکیک مرکزی از طریق یک جاده هوشمند را در نظر می گیرد، که امکان نظارت مداوم و به موقع از وضعیت کلی را در زمان واقعی فراهم می کند. در حال حاضر با پردازش داده ها در پنجره های زمانی، ارزیابی وضعیت چندین بار در ساعت با داده های جغرافیایی متراکم تر، و به دست آوردن نتایج نظارت دقیق تر و به موقع کار می کند.
یکی از اجزای سیستم یک DSS است ( شکل ۱۱ ) که ممکن است هشدارهای مربوط به نقض محدودیت های آلاینده را صادر کند. در عین حال، DSS به ما اجازه میدهد دادهها را ذخیره کنیم، سریهای زمانی تاریخی بسازیم، و آنها را برای پردازش آفلاین بیشتر یا سایر جزئیات احتمالی دادههای آلودگی که میتوان در مقیاس محله محلی انجام داد، در دسترس کاربر نهایی قرار دهیم. به عنوان مثال، موقعیت یابی بهینه ایستگاه های اندازه گیری ثابت).
۵٫ نتیجه گیری ها
سیستمی برای پایش محتوای ذرات در یک محیط شهری ارائه شد. این سیستم دارای سه جزء اصلی است: دستگاهی مبتنی بر حسگر Alphasense OPC-N2 که بر روی وسایل نقلیه در حال حرکت در منطقه نصب شده است. جاده هوشمند که به عنوان رابط بین شهر از یک طرف و وسایل نقلیه از طرف دیگر عمل می کند. و یک سیستم پشتیبانی تصمیم مبتنی بر GIS که میتواند به منظور کمک به مدیران شهر، دادهها را در زمان واقعی توضیح دهد.
ما یک کمپین میدانی آزمایشی برای جمعآوری دادهها در زمان واقعی از محلهای در شهر رم و شبیهسازی گردش معاصر ده وسیله نقلیه مختلف با سنسورهای متفاوت انجام دادیم.
بار داده محدود است ( جدول ۱ را ببینید ). بنابراین برای زیرساخت جاده هوشمند به طور خاص و برای هر نوع شبکه بی سیم به طور کلی مناسب است.
داده های جمع آوری شده پردازش شده و در دسترس یک GIS قرار می گیرد که به عنوان یک DSS برای مدیران منطقه در نظر گرفته شده است. این سیستم یک نمایش کاربرپسند از نقشهها در لایههای معین GIS (شبیه به [ ۹ ، ۱۰ ])، تجزیه و تحلیل فضایی محلی در امتداد مسیرهای مشخص شده با اهمیت ویژه، و امکان تنظیم آستانههای هشدار را فراهم میکند.
از این نظر، میتوان کل پلتفرم را بهعنوان ارائه نظارتی در زمان واقعی در نظر گرفت که به کاربر نهایی اجازه میدهد تا محتوای ذرات اتمسفر را به روشی متراکمتر هم در مکان و هم در زمان نظارت کند و راه را برای امکان انتشار باز کند. ترافیک را به روشی هدفمندتر و به موقع تر مسدود می کند.
یک موضوع تحقیقاتی دیگر شامل پردازش اندازهگیریها در زمان است تا ارزیابی شود که آیا پنجره زمانی فوقالذکر میتواند کوچکتر شود یا به جای اینکه یک مرحله زمانی باشد، در زمان لغزش یابد.
در حال حاضر، سیستم حافظه ندارد، یعنی خروجی پردازش پنجره زمانی فعلی به موارد قبلی بستگی ندارد. هدف کار بیشتر تعیین این است که آیا اجرای قابلیت های به خاطر سپردن در پلتفرم ممکن است نتایج بهتری ارائه دهد یا خیر. موضوع مهم دیگر به اصلاح الگوریتم همجوشی داده ها اشاره دارد. برای نتایج بهتر، روش میانگین وزنی درشت موجود با رویکردهای تصفیهشدهتر، مانند فیلتر کالمن یا شبکههای عصبی مقایسه میشود.