

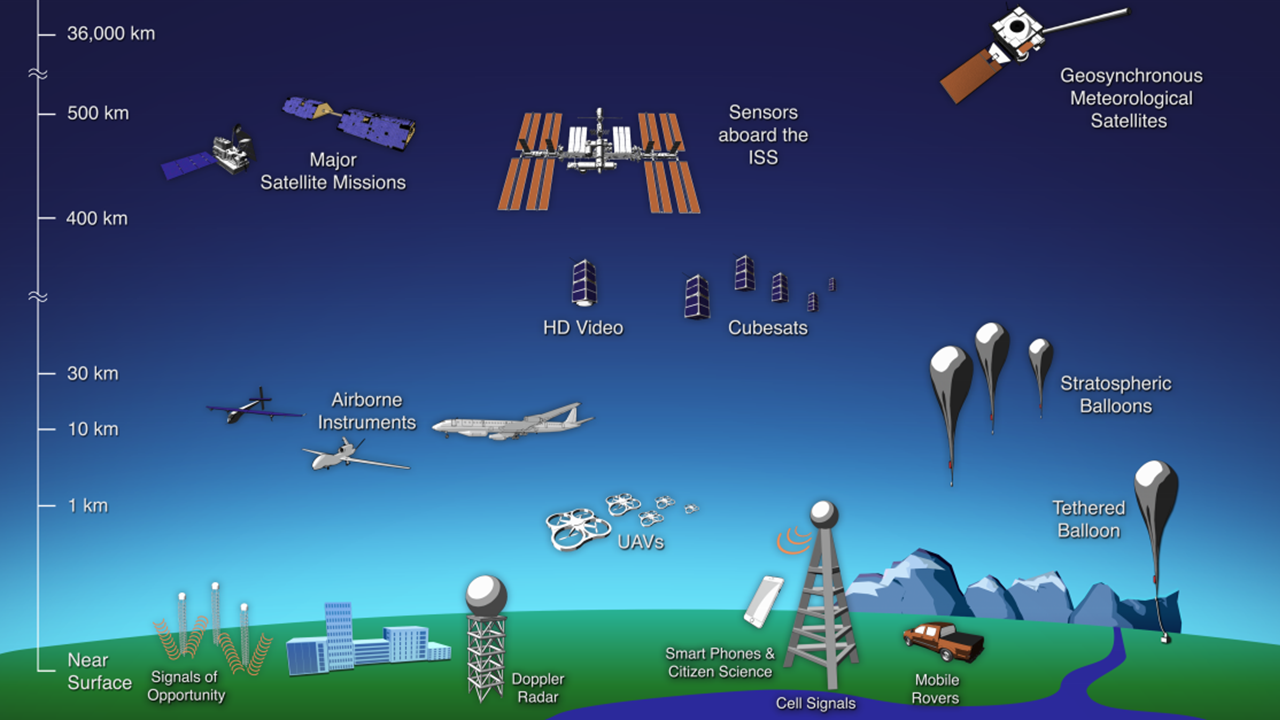
سنجش از دور (RS) یک فنآوری است که جمعآوری ابزار و کاربرد دادههای جغرافیایی برای کمک به توسعه کشاورزی را فراهم میکند. سنجشاز دور عموماً بهمعنایپذیرفتهشدهترین تکنیکهای مبتنی بر ابزار بهکار رفته در اکتساب و اندازهگیری سازماندهی فضایی یا توزیع جغرافیایی دادههای مربوط برخی ویژگیها مانند طیفی، فضایی، فیزیکی نظمی از نقاط هدف از اجسام و مواد از فاصله مشخصی از هدف مشاهده شده آن اشاره دارد. سنجشاز دور بررسی محیط توسط جغرافیدانان معمولاً با کمک وسایل مکانیکی انجام میشود بهعنوان سنسور از راهدور شناخته میشود.
این ابزار توانایی بسیار بهبود یافتهای در دریافت و ثبت اطلاعات در مورد یک شی بدون هیچگونه تماس فیزیکی دارد. اغلب، این سنسورها با استفاده از هلیکوپتر، هواپیما و ماهوارههاانجام میشود.اکثر دستگاههای حسگر با اندازهگیری یکشی، اطلاعات مربوط بهیک شی انتقال انرژیالکترومغناطیسی ازسطوح بازتابنده و تابشی را ثبت میکنند. تصاویر سنجش از دور کاربردهای زیادی در نقشهبرداری کاربری و پوشش زمینکشاورزی، نقشهبرداری خاک، جنگلداری، شهرسازی، تحقیقات باستانشناسی، نظامی، رصد و بررسی زمینشناسی دارد.
مروری بر فنآوری سنجشازدور
فنآوری سنجش از دور که در حالحاضر ابزار اصلی توسط سطح زمین و جو، در حال رصد سیارات و کلجهان و نقاطی مانند سطحزمین، مدار زمین و فضای بیرونی آن اندازهگیری میشوند. اصطلاح سنجش از دور توسط خانم Evelyn Pruitt ابداع شد در اواسط دهه۱۹۵۰، زمانی که او با دفتر تحقیقاتدریایی ایالاتمتحده (ONR) درخارج واشنگتن دی سی بهعنوان اقیانوسشناس کار میکرد.
سنجشازدور پذیرفتهشدهترین معنایی است که به «تکنیکهای مبتنی بر ابزار بهکار رفته در اکتساب و اندازهگیری سازماندهی فضایی» داده/اطلاعات در مورد برخی از ویژگیها مانند طیفی، اشاره دارد. فضایی، فیزیکی نظمی از نقاطی را در صحنه حس شده هدف قرار میدهدکه با ویژگیها، اشیاء، و مواد، انجام اینکار با استفاده از یک یا چنددستگاه ضبط غیرفیزیکی و مأنوس تماس با آیتم(ها) از فاصله محدودی از هدف مشاهده شده،که در آن آرایش فضایی حفظ شده است. تکنیکهای مختلف مربوط به صحنه (هدف) با استفاده از تشعشعات الکترو مغناطیسی، میدانهای نیرو یا انرژی صوتی که توسط دوربینهای ضبط، رادیومترها و اسکنرها، لیزرها، فرکانس رادیویی گیرندهها، سیستمهای رادار، ردیاب آوایی، دستگاههای حرارتی، آشکارسازهای صوت، لرزه نگارها، مغناطیسسنجها، گرانشسنجها، سنجسنجها و سایر ابزارها حس میشود. بهعبارت سادهتر، سنجشاز راه دور را میتوان بهعنوان «جمعآوری دادهها و اطلاعات» تعریف کرد در مورد “جهان” فیزیکی با تشخیص و اندازهگیری سیگنالهای تشکیل شده از تشعشعات، ذرات و میدانهایی که از اجسامی که فراتر از مجاورت دستگاه های حسگر فوری قرار دارند نشات میگیرند. در گستردهترین مفهوم، سنجش از راه دور کسب اطلاعات در مقیاس کوچک یا بزرگ از یک شی یا پدیده، با استفاده از ضبط یا سنجش لحظهای وسایلی که در تماس فیزیکی یا صمیمی با جسم نیستند، مانند مسیرهواپیما، فضاپیما، ماهواره است. درعمل، سنجشاز راهدور مجموعهای است که از طریق استفاده از انواع دستگاهها برای جمعآوری اطلاعات در مورد یک شی یا منطقه معین جدا میشود. بنابراین، رصدزمین یا سکوهای مجموعه ماهوارهای آبوهوا، اقیانوس وجو مشاهده سکوهای شناورآب و هوا، تصویربرداری تشدیدمغناطیسی(MRI)، توموگرافی انتشار پوزیترون (PET) و کاوشگرهای فضایی همگی نمونه هایی از سنجشازدور هستند. درکاربرد مدرن، این اصطلاح بهطور کلی بهاستفاده از سنسور تصویربرداری فنآوریهایی از جمله، جهت استفاده از ابزار در هواپیما و فضاپیما اما بدون محدودیت، و از سایر رشتههای مرتبط با تصویربرداری مانند تصویربرداری پزشکی متمایز اشاره دارد.دو نوع سنجشاز دور وجود دارد. (۱) حسگرهای غیرفعال انرژی طبیعی را تشخیص میدهند/ تشعشعی که توسط جسم یا ناحیه اطراف مشاهده شده ساطع یا منعکس میشود. نورخورشید منعکس شده رایجترین منبع تابش است که توسط حسگرهای غیرفعال اندازهگیری میشود. نمونههایی از سنسورهای غیرفعال از راه دور شامل دوربین عکاسی، مادونقرمز و رادیومترها هستند. (۲) از طرف دیگر مجموعه فعالانرژی را بهمنظور اسکن اشیاء ساطع میکند و مناطقی که پساز آن یک حسگر غیرفعال تشعشع موجود را شناسایی و اندازهگیری میکند منعکس شده یا از هدف بهقسمت دور پراکنده شده است. رادار نمونهای از سنجشازدور فعال جایی که تأخیر زمانی بینانتشار و بازگشت اندازهگیری میشود، تعیینمکان، ارتفاع، سرعت و جهت یک جسم است. سنجشازدور امکان جمعآوری اطلاعات در مناطق غیرقابل دسترس را فراهم میکند. سنجشازدور برنامههای کاربردی شامل نظارت بر جنگلزدایی، اثرات تغییرات آب و هوایی بر مناطق قطبشمال و قطبجنوب، اقیانوسها، اعماق اقیانوسها و در دسترسبودن آب در زمین و مواردبسیار دیگرمیباشد. پلتفرمهای مداری دادهها را از قسمتهای مختلف جمع آوری و انتقال میدهند طیفالکترومغناطیسی، که در ارتباط با سنجش و تحلیل هوایی یا زمینی در مقیاس بزرگتر اطلاعات کافی برای نظارت بر روندهای چنین پدیده های طبیعی بلندمدت و کوتاهمدت در اختیار محققان قرار میدهد. کاربردهای دیگر شامل مناطق مختلف علومزمین مانند مدیریتمنابعطبیعی، زمینههای کشاورزی مانند استفاده وحفاظتزمین ، امنیتملی، مجموعه زمینی و ایستاده در مناطقمرزی است.
تاریخچه سنجشازدور
فراتر از روشهای بدوی سنجشازدور، اجداد اولیه ما برای تماشای مناظر روی یک کوه یا درخت بلند میایستادند. نظم و انضباط مدرن با توسعه پرواز پدید آمد. بالنسوار از شهرها عکس میگرفت بالنهای آنها اولین استفاده تاکتیکی درطول جنگداخلی بود. کبوترهای پیامرسان، بادبادکها، راکتها و بالنهای بدونسرنشین نیز برای تصاویر اولیه استفاده میشد. بهغیر از بالنها، این اولین تصاویر منفرد بهویژه برای ساختن نقشه یا برای اهداف علمی مفید نبودند. عکاسیهوایی سیستماتیک برای استفاده نظامی از آغاز جنگ جهانی اول و رسیدن بهاوج در طول جنگ سرد با استفاده از هواپیماهای جنگی اصلاح شده است. یکی از پیشرفتهای اخیر این است که غلافهای حسگر کوچکتر مانند آنهایی که توسط مجریان قانون و ارتش، در سکوهای سرنشین دار و بدون سرنشین استفاده میشوند. مزیت اینروش این است که نیاز بهحداقل تغییر در بدنههواپیما دارد. فنآوریهای تصویربرداری بعدی شامل مادونقرمز، معمولی، رادار داپلر و دیافراگم مصنوعی است. توسعه ماهوارههای مصنوعی در نیمهدوم قرنبیستم بهسنجشاز راه دور اجازه داد تا در پایان جنگسرد در مقیاسجهانی پیشرفت کند. ابزار دقیق روی ماهوارههای مختلف رصد زمین و هواشناسی مانند Landsat Nimbus و مأموریتهای اخیر مانند RADARSAT و UARS جهانی اندازهگیری دادههای مختلف برای اهداف غیرنظامی، تحقیقاتی و نظامی ارائه شده است. کاوشگرهای فضایی بهسیارات دیگر نیز فرصتی برای انجام مطالعات سنجش از دور در فرازمینیها فراهم کردهاند محیطزیست، رادار دیافراگممصنوعی روی فضاپیمای نجوم نقشههای توپوگرافی دقیق ونوس ارائه شده است.تحولات اخیر شامل، شروع در دهه۱۹۶۰ و۱۹۷۰ با توسعهپردازش تصویر تصاویرماهوارهای میباشد. چندین گروه تحقیقاتی در درهسیلیکون ازجمله ناسا، تکنیکهای تبدیل فوریه را توسعه داد که منجر بهاولین مورد افزایش قابلتوجه دادههای تصویری، معرفی خدمات وب آنلاین برای دسترسی آسان بهدادههای سنجشازراهدور قرن بیستویکم، عمدتاً تصاویری با وضوح پایین/متوسط مانند Google Earth ایجاد کردهاست، سنجشازدور برای همه آشناتر بوده و علم را رواج داده است.

تکنیکهایجمعآوری دادهها
تابش الکترومغناطیسی
سنجشازدور عمل اندازهگیری یک شی یا یک پدیده بدون تماس مستقیم با آن است. غیرنفوذیاست. نیاز به استفاده از سنسور در فاصله دور از هدف موردنظر واقعشدهاست. سنسورابزاری (دوربین) که اندازهگیری از راه دور را انجام میدهد. انواع مختلفی از سنسورها وجود دارد، اما تقریباً همه آنها عاملی مشترک دارند شی که آنها”حس”می کنند معمولاً تابش الکترومغناطیسی (EMR) یا انرژی یا نور اندازهگیری میکنند. EMRانرژی است که در فضا منتشر میشود بهشکل بستههای انرژی کوچکی بهنام فوتونها که همموج مانند و همخواص ذره مانند از خودنشان میدهند. برخلاف سایر روشهای انتقال انرژی، مانند رسانایی(گرمکردن یکتابهفلزی) یا همرفت (پرواز با بالون هوای گرم)، تشعشع (مانند EMR) قادر بهانتشار در خلاء فضا است. سرعت آن EMR در خلاء (فضای بیرونی) تقریباً ۳۰۰۰۰۰ کیلومتر در ثانیه ( ۱۰۸*۳) متر در ثانیه۱- یا ۱۸۶۰۰۰ مایل در ثانیه۱- است. این یک ارتباط بسیار سریع است میانهای با نورمرئی با رنگهای قرمز، سبز و آبی که روزانه میبینیم نمونهای از EMR است. اما طیف بسیار بزرگتری از چنین انرژی وجود دارد. ما اغلب این طیف یا محدوده را از نظر طولموج انواع مختلف EMR مشخص میکنیم. بهدلایل مختلف، برخی از طول موجهای EMR وجود دارد که در سنجشاز دور بیشتر از سایر طول موجها استفاده میشود.
ثبت تشعشعات الکترومغناطیسی
دو دسته کلی از سیستمهای حسگر مورد استفاده در سنجش از دور وجود دارد: فعال و غیرفعال.
حسگرهای غیرفعال به EMR از منابع موجود، معمولاً خورشیدی، متکی هستند. با توجه بهدماهای شدید و فعالیت هستهای در سطحخورشید، این منبع انرژی عظیم، گسترده و پیوسته ساطع میکند. محدوده EMR، که نور مرئی تنها بخش کوچکی از آن است. EMR ساطعشده از خورشید درخلاء فضا حرکت میکند، با جو و منعکس کننده اشیا و پدیدههای روی سطحزمین تعامل میکند. آن EMR باید دوباره با جو قبلاز رسیدن بهیک سیستم حسگر از راه دور در هوا یا در مدار تعامل داشته باشد. مقداری از انرژی خورشید توسط اجسام هدف مانند آب، سنگ ها و غیره درسطحزمین جذب میشود و اینها اغلب در نتیجه گرم میشوند. سپس انرژی جذب شده میتواند مجدداً منتشر شود، طول موجهای بلندتر برخی از سیستمهای حسگر غیرفعال برای ضبط بخشهایی از آن طراحی شدهاند این انرژی ساطع کرد.
از سوی دیگر، سنسورهای فعال خود EMR مورد نیاز خود را تولید میکنند اشیاء یا پدیدهها را از راه دور حس میکند.EMR سنسورفعال از حسگر منتشر میشود، با آن تعامل دارد، جو به اشیاء مورد نظر درختان، سنگها، ساختمانها و غیره، با این اشیاء تعامل دارد میرسد ، وباید برای سفر به عقب جو منعکس شود و در سنسور ثبت شود. بهطور کلی دو نوع حسگرها فعال وجود دارد:
الف: رادار (تشخیص و محدوده رادیویی) که از انرژی مایکروویو استفاده میکند.
ب. LiDAR (تشخیص و محدوده نور) که از انرژی مادونقرمز نزدیک یا مرئی استفاده میکند.
بازتاب انرژی الکترومغناطیسی
اگر هر جسم یا پدیدهای روی زمین در هنگام تعامل با EMR دقیقاً به همان شیوه رفتار کند، سنجشازدور فایده چندانی نخواهد داشت. خوشبختانه اجسام بخشهایی متفاوت از طیف الکترومغناطیسی را با درجات مختلف کارایی منعکس میکنند. بهطور مشابه، اجسام مختلف EMR قبلاً جذبشده رابا تفاوت درجاتکارایی ساطع میکنند. در طیفمرئی این تفاوتها در بازده بازتابی بیشمار رنگهایی که میبینیم را بهحساب میآوریم. بهعنوان مثال، گیاهان رنگسبز از آن ظاهر میشوند ، زیرا مقادیر بیشتری از نورسبز را نسبت به نور آبی یا قرمز منعکس میکنند. رسم سطوح بازتابطیفی یکجسم یا پدیده معین بر اساس طولموج منحنی بازتاب طیفی یا اثر طیفی را بهدست می دهد. این اثرکلید سنجشازراه دور برای تشخیص یک نوع هدف از نوع دیگر است. بهعنوان مثال اثر یکدرخت برگریز با درخت همیشهسبز کاملاً متفاوت است.
سنسورهای آنالوگ یا مبتنی بر فیلم
امروزهزمانی که بهطیفوسیعی از آنها اشاره میکنیم، اصطلاحات آنالوگ و دیجیتال لوازم برقی را میشنویم. به طورکلی، دستگاههای آنالوگ با استفاده از ویژگیهای فیزیکی پویا کار میکنند (بهعنوانمثال، تغییراتشیمیایی) در حالی که دستگاههای رقومی با استفاده از اعداد (۰ و ۱) کار میکنند. سیستمهای حسگر از راه دور الگوها را در EMR ورودی با استفاده از آشکارسازهای آنالوگ ثبت میکنند. در حالیکه تمام سیستمهای حسگر از راه دور حداقل یک مکمل جزئی از اجزای آنالوگ دارند، برخی از سیستمهای حسگرکاملاً آنالوگ هستند. نمونه بارز این دوربینهای هوایی مبتنی بر فیلم است. امولسیون کریستالهای هالید نقره در فیلم از نظرشیمیایی بهقرار گرفتن در معرض EMR پاسخ میدهد. پردازش آنالوگ بیشتر برای تولید منفی و مثبت شفافیتها و عکسهای چاپی استفاده میشود. دریکدوربین هوایی آنالوگ، مدتزمانقرارگیری در معرضEMR ورودی کنترل میشود از طریق دیافراگم که فقط برای کسری از ثانیه باز میشود. در حالیکهدریچهباز است، نور ورودی با استفاده از یکلنز با کیفیت بالا بر روی صفحه فیلم در پشتدوربین متمرکز میشود. با هر بار قرارگرفتن در معرض، تصویر متمرکز EMR باعث ایجاد یک ماده شیمیایی ماندگار میشود بهبخش نوردهی فیلم تغییر دهدو برای تکرار فرآیند بهبخش جدیدی از فیلم نیاز است که نوردهی نشده باشد.
یکدوربین مبتنی بر فیلم که برای سنجشازراهدور استفاده میشود، از چند جهت با یک دوربین معمولی که برای عکاسی استفاده میشود، متفاوت است. برای یک شیء، خود فیلم بسیار بزرگتر است (نه اینچ عرض). برای دیگری، فاصله کانونی دوربین بسیار بیشتراست (حدود ۱۷۵ میلیمتر). بدون پرداختن بهجزئیات در علم عکاسی، این تفاوتها تاعکسهای هوایی دوربین برای گرفتن عکسهای بهتر و در مقیاس بزرگتر حتی از سکوی متحرک اجازه میدهد. اکثر دوربینهایی که برای این منظور طراحی شدهاند متریک هستند، یعنیابعاد داخلی آنها بهطور دقیق کالیبره شده و بهکاربر گزارش میشود. این برای تمرین فتوگرامتری یا اندازهگیری دقیق روی نقشههای عکاسی حیاتی است.
سنسورهای رقومی
سنسورهای رقومی همچنین الگوهای EMR ورودی را با استفاده از آشکارسازهای آنالوگ اندازهگیری میکنند. با اینحال، اندازهگیریهای EMR گرفته شده توسط هر عنصر آشکارساز، نه با استفاده از یک محیط آنالوگ مانند فیلم، بلکه با استفاده از اعداد ثبت میشود. این اندازهگیریها از طریق فرآیندی به نام تبدیل آنالوگ به دیجیتال (A-to-D) رقومی میشوند. مقادیر ممکن در یکمحدوده ازپیشتعریفشده مانند۰ تا ۲۵۵ قرار دارند. سپس هر مقدار عددی ثبتشده بر روی نوعی رسانهرقومی، مانندهارد دیسک، بهعنوان بخشی از مجموعه داده رستری ذخیره میشود. مقدار در هر سلول رستری نشاندهنده مقدار انرژی دریافتی در حسگر از یکناحیه دایرهای خاص، میدان دید آنی (IFOV) روی زمین است. حسگرهای رقومی از همان فنآوری پایهای استفاده میکنند که اسکنر اسناد کامپیوتری یا دوربین دیجیتال است. در واقع، دوربینهای دیجیتال تخصصی اغلب برای دریافت ریموت استفاده میشوند دادههای حسگر و اسناد اسکنرهای حرفهای اغلب برای تبدیل آنالوگ دادههای سنجش ازدور به دادههای رقومی استفاده میشوند. آشکارسازها در یک حسگر رقومی را میتوان بهروشهای مختلفی مرتب کرد. روشی از یک آشکارساز برای هر باند فرکانسی استفاده میکند. سپس از یک آینه اسکن برای گرفتن EMR در هر IFOV در امتداد یک خط اسکن استفاده میشود. حرکت رو به جلو حسگر اجازه میدهد تا خطوط اسکن اضافی و در نتیجه یک تصویر دو بعدی ایجاد شود. این نوع ابزار اغلب به عنوان سنسور آینه اسکن نامیده میشود. روش دوم، داشتن یکنظم خطی از آشکارسازها برای هر باند است. هر آشکارساز در یکردیف، EMR را برای یک IFOV در بعد متقاطع ثبت، یعنی عمود بر جهت پرواز میکند. حرکت رو بهجلو سنسور دوباره امکان اندازهگیری های مکرر و تصاویر دو بعدی را فراهم میکند. این نوع سیستم حسگر است معمولاً اسکنر فشار جاروب با نظم خطی نامیده میشود.
سیستمهای جاروب فشاری نسبت به سنسورهای آینه اسکن چندین مزیت دارند. قطعات متحرک کمتری دارند، بنابراین معمولاً دوام بیشتری دارند. همچنین، فرآیند اختصاص مختصات بهدادههای فشار جاروب بسیار راحتتر است. سومین پیکربندی حسگر رقومی همان پیکربندی که بیشتر شبیه عملکرد آن است سیستمهای مبتنیبر فیلم آنالوگ است. در اینحالت، یکنظم منطقه کامل در پشت سنسور قرار میگیرد. انرژی از طریق یکعدسی بر روی این بانک آشکارساز متمرکز میشود. این نوع از سنسورها را دوربینهای دیجیتال یا حسگرهای نظم ناحیهای مینامند.آنها اغلب در موارد مشابه برنامههای کاربردی بهعنوان دوربینهای مبتنی بر فیلم استفاده می شوند.
انواع رزولوشن
رزولوشن مشخص میکند که تکتک اجزای یک شی یا پدیده چقدر قابل تشخیص هستند. هنگام بحث در مورد مشخصات سیستمهای حسگر از راهدور، بهطور کلی از چهار نوع مختلف وضوح صحبت میشود.
دقت زمانی
وضوح زمانی، تعداد دفعاتی است که حسگر از یک سایت خاص بازدید میکند یا میتواند از جمعآوری دادهها بازدید کند. این مهم است زیرا بسیاری از کاربردها به مشاهده تغییر در پدیدهها در طولزمان بستگی دارد. یک ابزار سنجش ازدور بر روی یک پلتفرم بهعنوان یکماهواره، یکهواپیما، یکبالون هوای گرم نصب شده است. پلتفرمی که سنسور روی آن نصبشده است بزرگترین عامل تعیینکننده وضوح زمانی آن سنسور است. برخی از ماهوارهها به دور زمین میچرخند بدون اینکه هرگز بهسایه آن نزدیک شوند، یعنی در مدار همگام با خورشید قرار دارند. سایر ماهوارهها موقعیت ثابتی را در بالای زمین در حال چرخش حفظ میکنند، این ماهوارهها در مدار ژئو سنکرون هستند. در هر صورت، این ماهوارهها وضوح زمانی منظم و قابلپیشبینی دارند (هر ۱۶ روز). برخی از حسگرهای مبتنی بر ماهواره به دلیل توانایی آنها برای اشاره به اهداف مختلف در نزدیکی میدان دید پیشفرض خود، انعطافپذیرتر از سایر سنسورها هستند. این حسگرهای انعطافپذیرتر ممکن است محدوده تفکیکزمانی (۲-۳ روز) داشته باشند. حسگرهای نصب شده بر روی هواپیما، مأموریتهای موقت یا درخواستی را با وضوح زمانی کمتر قابل پیشبینی اما انعطافپذیرتر (هر ساعت) انجام میدهند.
تفکیک فضایی
وضوح فضایی اندازه اندازهگیریهای فردی سیستم سنسور از راه دور را توصیف میکند. این مفهوم ارتباط نزدیکی با مقیاس دارد. با یک حسگر آنالوگ، مانند فیلم، وضوح فضایی معمولاً با همان عبارات مقیاس بیان می شود (مثلاً ۱:۵۰۰). از آنجایی که حسگر رقومی اطلاعات را در قالب رستری ثبت میکند، وضوح فضایی اندازه سلول (به عنوان مثال، ۳×۳ متر) در واحدهای زمینی است.
وضوح طیفی
وضوح طیفی توانایی سیستمهای حسگر را در تشخیص بخشهای مختلف طیف EMR توصیف میکند. برخی از حسگرها فقط بهنور مرئی حساس هستند، در حالی که برخی دیگر میتوانند انرژی نزدیک بهمادونقرمز را نیز جذب کنند. بخشهایی از طیف که ابزار بهآن حساس است، باندهای آن نامیده میشود. یک حسگر میتواند چندین باند داشته باشد و باندها میتوانند عرضهای متفاوتی داشته باشند. وضوح طیفی هم به عدد و عرض نوارها برای یک سنسور معین هم اشاره دارد. یک باند پانکروماتیک یک باند وسیع است که یک محدوده طیفی بزرگ، اغلب کل طیف مرئی را در بر میگیرد. معمولاً ما فیلمهایی را که به کل محدودهمرئی حساس هستند، فیلم سیاه و سفید مینامیم زیرا اغلب تصاویری از این نوع فیلم را در مقیاس خاکستری چاپ میکنیم. با این حال، سنسورهای آنالوگ و دیجیتال وجود دارند که پانکروماتیک گسترده ای دارند باندهایی که بخش مادون قرمز نزدیک طیف را نیز در بر میگیرند.
هنگامی که یک سنسور فقط چند بخش از طیف را ثبت میکند، یعنی فقط شامل یک باندهای کمی و نسبتاً گسترده، گفته میشود که یک سیستم چندطیفی است. یک حسگر چندطیفی ممکن است دو یا سه باند در محدوده مرئی داشته باشد، یعنی قرمز، سبز و آبی و همچنین ممکن است دارای چند باند مادونقرمزنزدیک یا میانی باشد. سیستمهای چندطیفی معمولی بین ۴ تا ۱۰ باند دارند. حسگرهای فراطیفی دارای تعداد زیادی نوار نسبتاً باریک هستند. طبقتعریف، حسگرهای فراطیفی قدرت تفکیک طیفی بالاتری نسبت به سنسورهای چند طیفی دارند. معمولاً یک حسگر زمانی فراطیفی در نظر گرفته میشود که حداقل ۲۰ یا ۳۰ باند داشته باشد. بسیاری از این سنسورها صدها باند دارند. بهطور کلی، یکسنسور با طیف بیشتر باندها توانایی بیشتری برای تمایز بین دو جسم با خواص طیفی مشابه دارند. هر باند در یک مجموعه دادهرقومی را میتوان بهعنوان یک لایه ر ستری مجزا در نظر گرفت. تصویری را بهصورت سهبعدی با ردیفها، ستونها و نوارهایی که مختصات x، y و z یک مکعب را پر میکنند، تجسم کنند.

وضوح رادیومتری
وضوح رادیومتری تعداد مقادیر منحصر بهفردی را توصیف میکند که میتواند توسط یک سیستم حسگر هنگام اندازهگیری EMR منعکس شده یا ساطع شده ثبت شود. در این سیستم رقومی بهراحتی بهعنوان یکعدد تعیین میشود. از آنجایی که اعداد رقومی در سنسور از راه دور دادهها در رایانه ذخیره میشوند، آنها اغلب بر حسب تعداد بیت بیان میشوند برای ذخیره اعداد مختلف (مثلاً ۸ بیتی، ۱۱ بیتی) استفاده میشود. یک سنسور ۸ بیتی مقدار ارزش را برای هر اندازهگیری در محدوده اعداد صحیح از ۰ تا ۲۵۵ ذخیره میکند. این محدوده دارای ۲۸-۲۵۶ مقادیر گسسته است. در سیستمهای آنالوگ یا مبتنی بر فیلم، کیفیت فیلم است که وضوح رادیومتری آن را تعیین میکند.
تبدیل دادههای سنجش از دور بهدادههای مکانی
برنامههای سنجش از دور بهندرت بدون حداقل مقداری مستقیم موفق هستند اندازهگیریها / حقیقتزمینی که در داخل منطقه گرفته میشود. با این حال، “حقیقت” واقعاً یک نام اشتباه است از آنجایی که همیشه حداقل برخی از اندازهگیریهای خطا وجود دارد، حتی اگر وجود داشته باشد مستقیم گرفته شده است. “مرجعزمینی” توصیف بهتری خواهد بود. یک اصطلاح درست برای اندازهگیریهایی که مستقیماً انجام میشوند، برخلاف اندازهگیریهای از راه دور، جمعآوری دادهها در محل است. چندین نوع اندازهگیری در محل ممکن است برای یک پروژه معین یا اپلیکیشن ضروری باشد. تقریباً تمام پروژههای سنجش از دور برای انجام کالیبراسیون هندسی و رادیومتری نیاز به مقداری جمعآوری دادههای درجا دارند. در محل فرعی ممکن است برای ایجاد نقشههای مرجع از متغیرهای فضایی، از جمله ویژگیهای بیوفیزیکی، به دادهها نیاز باشد.

تصحیح هندسی
هنگامی که دادههای حسگر از راه دور در ابتدا جمعآوری میشوند، دادههای مکانی نیستند. به منظور انتقال به دادههای مکانی، تصحیح هندسی باید اعمال شود تا دادهها به یک سیستم مختصات دنیای واقعی تبدیل شوند. فراتر از نداشتن مختصات دنیای واقعی دادههای خام نیز دارای اعوجاج هندسی هستند. این بدان معنی است که همه اشیا یا پدیدههایی که در دادهها دیده میشوند بهیک سیستم مختصات موردنظر بهطور یکسان نابهجا نیستند. اعوجاج معمولاً از نقطهای در دادههایی که مستقیماً بهدستآمدهاند افزایش مییابد. بنابراین اعوجاج بسته بهپیکربندی حسگر (مثلاً، اسکن سنسورهای آینهای در مقابل دوربینهای دیجیتال نظم منطقهای) آن متفاوت است. یکی دیگر از منابع اعوجاج، تغییرات در زمین و اشیاء روی زمین است. اجسام بلند و زمین با شیب تند نسبت به اجسام مسطح در زمینهای مسطح بهاعوجاج بیشتری منجر میشوند. یکروش اساسی برای تصحیح هندسی شامل استفاده از گیرنده GPS در حوزه است. اندازهگیریهای GPS در مکانهایی انجام میشود که در تصاویر نیز به راحتی قابل شناسایی هستند. این نوع مکانها با توجه به وضوح فضایی دادههای سنجشاز راه دور متفاوت خواهند بود. در حالت ایدهآل، کوچکترین ویژگیهای ممکن که میتوان در آن دادهها تجسم کرد، باید در حوزه قرار گرفته و موقعیتهای آنها بررسی شود. این ویژگیها نیز باید به صورت دائمی قرارگیرند. مکانهای ثبت شده این ویژگیها در منطقه مورد مطالعه در مجموع بهعنوان نقاط کنترل شناخته میشوند. تقاطعهای جادهای معمولاً نقاط کنترل خوبی را ایجاد میکنند. ویژگیهای بالای سطحزمین نقاط کنترل خوبی را ایجاد نمیکنند زیرا باعث ایجاد اعوجاج میشوند. نقاط کنترل باید در مکانهایی جمعآوری شوند کهبهطور مساوی در سراسر تصویر حسگر از راه دور فاصله دارند. در واقع، مکاننسبی نقاط کنترل حداقل بهاندازه تعداد نقاط مهم است. هنگامی که نقاط کنترل کافی جمعآوری شد، میتوان از آنها برای تنظیم دادهها بهمقدار تقریبی آن موقعیتمکانی در یکسیستم مختصات استفاده کرد. بیشتر فضای جغرافیایی بستههای نرمافزاری یک رابط برای انجام اینکار فراهم میکنند. بهعنوان بخشی از فرآیند، بستهنرمافزاری معمولاً عددی را گزارش میکند که نشاندهنده درجه اجرای موفقیتآمیز تبدیل مورد نظر است. میزان موفقیت بستگی بهمیزان اعوجاج موجود در دادههای خام دارد. هنگامی که دادههای سنسور از راه دور دارد تحت این فرآیند گفته میشود که دادههای جغرافیایی اصلاح شده است.
تصحیح فتوگرامتری
به منظور ایجاد تصویری که عاری از هرگونه تحریف عمده باشد، زمین و اعوجاجهای ناشی از حسگر باید به صراحت در نظر گرفته شوند. این کار با استفاده از ترکیبی از نقاط کنترل GPS، یک مدل ارتفاعی رقومی (DEM) و یکگزارش دقیق از اعوجاج موجود در سیستم حسگر انجام میشود. زمانیکه دادهها در آن تصحیح شدند به این ترتیب گفته میشود که اصلاح شده است. در یک تصویر تصحیح شده، همه نقاط در موقعیت x،y مناسب خود قرار دارند و همانطور که اگر مستقیماً پایین آنها نگاه میکرد، بهنظر میرسیدند. تمرین صحت سنجی بخشی از فتوگرامتری-هنر اندازهگیری مستقیم از عکسها و سایر دادههای سنجش از راه دور است. اندازهگیریهای بهدست آمده با استفاده از تکنیکهای فتوگرامتری شامل ارتفاع اجسام در زمین، مکان x،y آنها و فاصله زمین بین اجسام است.

تصحیح رادیومتری
علاوه بر اعوجاج هندسی،EMR که توسط سنسور شامل اعوجاجهای رادیومتری دریافت میشود. منشأ این اعوجاجها در درجه اول جو و اجزای پویای آن است. اگر جوی وجود نداشت که بتوان با آن مخالفت کرد، EMR ثبت شده توسط سنسور نمایش بسیار عالیتری از EMR منعکس شده بود. یا از شی یا پدیده هدف ساطع می شود. با این حال، در طول مسیر بین هدف و سنسور، EMR باید دو بار با جو تعامل داشته باشد. برخی از این انرژی پراکنده شده و مقداری از آن جذب میشود. ترکیبات جوی مانند آب بخار و آلودگی در مکان و زمان متفاوت است و بنابراین این اعوجاج مقایسه مجموعه دادههای جمعآوری شده در زمانهای مختلف را دشوار می کند. راههای مختلفی برای به حداقلرساندن این اعوجاج وجود دارد. رادیومتریک بین زمان اگر مجموعه دادهها در زمانهای مشابه جمعآوری شوند تا موقعیت خورشید ثابت بماند، میتوان تفاوتها را بهحداقل رساند. همچنین، بهدست آوردن اطلاعات در یک روز صاف، میزان بخار آب و ابرها را به حداقل میرساند. حتی پس از انجام این اقدامات، بسیاری از برنامههای کاربردی نیاز بهاضافی دارند تصحیح رادیومتریک برای محاسبه تفاوت ها و اعوجاج در مقادیر EMR در سنسور ثبت شده است. این را میتوان بهچند روش مختلف انجام داد، که هر کدام درجاتی از دشواری و سطح عدم قطعیت در نتایج دارند. در زیر سه مثال آورده شده است، از بسیاری که میتوان نسبت داد. یکروش ساده تصحیح رادیومتری این است که تمام مقادیر روشنایی پیکسل در یک تصویر را با شناسایی یکی از تاریکترین پیکسلها و یکی از درخشانترین پیکسلهارا تشخیص دهد. تاریکترین پیکسل مجدداً مقدار ۰ و روشنترین پیکسل مقدار ۲۵۵ تعیین میشود. سپس مقادیر میانی مجدداً مقیاس می شوند تا به طور مساوی در بین آنها قرار گیرند. اگرچه این روش بسیار آسان است و به دادههای ورودی اضافی نیاز ندارد، کمترین اطمینان را دارد. این تکنیک بهعنوان کشش حداقل کنتراست شناخته میشود. روش دوم و ساده به عنوان کالیبراسیون خط تجربی نامیده میشود. در این روش چندین اندازهگیری رادیومتری درجا بر روی اجسام مختلف همزمان با کسب اطلاعات سنسور از راه دور انجام میشود. ابزار مورد استفاده برای به این اندازهگیریها رادیومتر میگویند. بر خلاف سیستم حسگر از راه دور، رادیومتر برای اندازهگیری در محل استفاده میشود و تقریباً هیچ جوی وجود ندارد که بتوان با آن مقابله کرد. دادههای جمعآوری شده با استفاده از رادیومتر برای ایجاد یکخطی ساده تابع ریاضی برای پیشبینی مقادیر رادیومتری در کل تصویر استفاده می شود.
روش سوم پیچیدهتر از دو روش قبلی است. جمعآوری اطلاعات صریح در مورد شرایط محیطی در زمان کنترل از راه دور جمعآوری دادههای حسگر متکی است. این اطلاعات ممکن است شامل مشخصات دقیق دما و رطوبت در ستون اتمسفر، هندسه خورشید-زمین، و موقعیت سنسور نسبت به هر پیکسل باشد. این روش در واقع گروهی از روشها است، هر کدام به اطلاعات متفاوتی نیاز دارند. سپس از الگوریتمهای کامپیوتری خودکار برای پردازش دادههای حسگر راه دور به همراه دادههای جانبی برای تولید تصویر رادیومتری تصحیح شده استفاده می شود.
تفسیر تصویر بصری
با قدرت سیستم بینایی انسان، اطلاعات زیادی در سنسور از راه دور وجود دارد دادهها را میتوان بهسادگی با بازرسی بصری بهدست آورد. بهعنوان مثال میتوان بهوسعت فضایی یکدریاچه، موقعیت جادهها و تعداد خانه های یک جامعه اشاره کرد. اینها همه متغیرهایی هستند که میتوان آنها را در زمین “مشاهده” کرد و مستقیماً با تجسم تصویرسازی آن تفسیر کرد. در این موارد یک تحلیلگر تصویر آموزشدیده از ترکیبی از تجربه دنیای واقعی و قوانین اکتشافی سرانگشتی برای تفسیر آنچه در تصویر دیده میشود و تعیین اهمیت آن استفاده می کند. فرآیند تفسیر تصویر را میتوان به عناصر اساسی آن تقسیم کرد، از جمله:
- مکان مطلق (مختصات)
- موقعیت نسبی
- اندازه
- شکل
- سایه
- تن/رنگ
- بافت
- الگو
- ویژگیهای ۳ بعدی
- کامپوزیتهای رنگی
نور سفید خورشید از EMR از تمام طول موجهای موجود در محدوده طیفمرئی تشکیل شده است. هنگامی که نور سفید از یک منشور عبور میکند و بهرنگین کمان جدا میشود، میتوانیم این را بهوضوح ببینیم. ترکیب دوباره این رنگهای رنگینکمان نور سفید با هم نتیجه میدهد. افزودن تنها بخشهایی از نور رنگین کمان باعث ایجاد رنگ متفاوتی میشود. میتوان هر رنگی را با ترکیب سه رنگ اصلی – قرمز، سبز و آبی (نظریه رنگ افزودنی) ایجاد کرد. هر پیکسل در صفحه نمایش کامپیوتر در واقع با استفاده از سه پیکسل “تفنگهای” نور متفاوت، یکی برای هر یک از این رنگهای اصلی ساخته شده است.
این اسلحهها دستورات کامپیوتر برای نمایش با شدتهای مختلف پاسخ میدهند. اضافه شدن EMR منتشر شده توسط این سه تفنگ تعیین میکند که کاربر چه رنگی را درک میکند. تجسم اولیه دادههای حسگر از راه دور یک جنبه مهم یکتلاش برای تفسیر اثربخش است. دادههای سنسور از راه دور رقومی با اختصاص ثبتشده مقادیر روشنایی به سه تفنگ رنگی ذکر شده در بالا نمایش داده میشود. هنگامی که قرمز، سبز و نوارهای آبی
در طیفمرئی به تفنگهای رنگی قرمز، سبز و آبی مربوطه نسبت داده میشود، نتیجه نمایش داده شده یک ترکیب رنگ واقعی است. با این حال، از راه دور سیستمهای حسگر اغلب EMR را در خارج از محدوده قابل مشاهده اندازهگیری میکنند و نیاز به ایجاد کامپوزیتهای رنگ کاذب آن دارند. بهعنوان مثال، نوارهای نزدیک به مادون قرمز اغلب با استفاده از تفنگ رنگ قرمز نمایش داده میشوند. هنگام نگاهکردن بهیکتصویر ترکیبی با رنگ کاذب، باید مراقب باشید برای تفسیر صحیح آن گرفته شده است.
طبقهبندی خودکار
اگر چهتفسیر دستی تصویر ارزشمند است و اغلب اطلاعات دقیق ارائه میدهد وبسیاری از برنامهها نیاز به اشیاء روی زمین دارند سریعتر و مقرون بهصرفهتر طبقهبندی شوند. در این موارد لازم است بهطور خودکار تصویر را با استفاده از الگوریتمهای کامپیوتری تفسیر یا طبقهبندی میکند. در اصل دو راه متفاوت برای نزدیکشدن به این هدف وجود دارد. هر دو بر این مفهوم ساده مبتنی هستند که اجسام یا پدیدههای مشابه دارای خواص بازتابی طیفی مشابهی هستند. روش اول بهعنوان طبقهبندی بدون نظارت نامیده میشود. در این روش، الگوریتم کامپیوتر بدون هیچگونه آگاهی قبلی از صحنه عمل میکند. پیکسلها بر اساس شباهت ویژگیهای طیفی با هم گروهبندی میشوند. سپس این خوشههای پیکسلهای مشابه، که کلاسهای طیفی منحصربهفردی را نشان میدهند، به کاربر گزارش میشوند ، که مسئول تبدیل آنها به کلاسهای اطلاعاتی است. این فرآیند را میتوان با دادههای درجا و/یا تفسیر دستی تصویر کمک کرد. طبقهبندی نظارت شده، روشدوم است، نیاز به این دارد که کاربر مقداری آگاهی از اشیاء و پدیدههای واقعی درون تصویر داشته باشد. این دانش میتوانست از طریق جمعآوری دادههای درجا یا تفسیر دستی تصویر بهدست آید. کاربر کلاسها را مشخص میکند (مثلاً آب، جنگل، محصولاتزراعی) و سپس دستور میدهد، یا الگوریتم کامپیوتر با تغذیه محل دقیق چندین مثال آموزشی برای هر کدام کلاس در سراسر تصویر آموزش میدهد. الگوریتم کامپیوتر ویژگیهای این نواحی را بررسی میکند و سپس مناطق مشابه را در سراسر تصویر جستجو میکند و در نهایت کلتصویر را طبقهبندی میکند. دادههای طیفی اغلب منبع داده اولیه در نظر گرفته شده در فرآیند هستند، اگرچه اخیراً تلاشهای بیشتری برای ترکیب جنبههای پیشرفتهتر ، مانند شکلشی و موقعیت نسبی انجام شده است.
نگاشت متغیرهای فضایی
جنبههای خاصی از پدیدهها وجود دارد که باید در عین حال که مستقیم هستند، تماس با یک شی احساس شوند. بهعنوان مثال، اندازهگیری مستقیم زیستتوده زنده، مقدار ماده زنده موجود در پوشش گیاهی غیرممکن است. بدونبرداشت پوششگیاهی، پردازش آن برای حذف آب و موادخارجی و سپس آن را وزن کند. با این حال، این امکان برای یکفرد آموزشدیده وجود داردکه زیستتوده موجود در یک تودهگیاهی خاص را بدون تماس مستقیم با آن تخمین بزند. بهروشی مشابه، اصول سنجش از دور راهی برای تعیین کمیت آنچه که «دیده میشود» و ارائه اطلاعاتی مانند زیستتوده یا سایر متغیرهای بیوفیزیکی، که در یک تصویر وجود دارند، ارائه میکنند.
نقشهبرداری زیستتوده نیاز به اندازهگیری درجا از پوشش گیاهی علاقه دارد. این اندازهگیریها برای ساخت یک مدلریاضی مربوط به مقدار زیستتوده تا مقادیر بازتابطیفی در دادههای حسگر از راه دور استفاده میشوند. نمونهای از این نوع معادله میتواند بهصورت زیر باشد:
Biomass = Bias + (Constant A x Near-infrared) + (Constant B x Red)
علاوه بر استفاده مستقیم از مقادیر باند، مشخص شده ترکیبات ریاضی مقادیر باند برای نگاشت انواع مختلف پدیدهها مؤثر است. بهعنوان مثال، شاخص گیاهی تفاوت عادی شده (NDVI) اغلب بسیار بهتعدادی از خواص پوششگیاهی، از جمله زیستتوده سبز مرتبط است. بسیاری از شاخصهای نوار دیگر برای استفاده در پوشش گیاهی، زمینشناسی، و سایر مناطق کاربردی وجود دارد.
ایجاد دادههای ارتفاعی از دادههای سنجش از راه دور
ارتفاع نمونه دیگری از یک متغیر پیوسته است که از راه دور قابلسنجش است. این را میتوان بهچندین روش مختلف انجام داد. یکی از طریق جمعآوری است جفت تصویر استریوسکوپی در هر جفت، تصاویر تا حدی همپوشانی دارند. این واقعیت که دو تصویر از موقعیتهای مختلف به دست میآیند به ما امکان میدهد اطلاعات سه بعدی (۲ بعدی بهعلاوه ارتفاع) را از قسمت همپوشانی استخراج کنیم. این روش شاخهای از فتوگرامتری است. اصل عملیات ارتباطنزدیکی با نحوه تشخیص اطلاعات سهبعدی از طریق ترکیب تصاویر مختلف از دو چشم ما دارد. در واقع استریوسکوپیک جفت تصاویر حسگر از راه دور را میتوان از طریق دستگاهی بهنام استریوسکوپ مشاهده کرد، بنابراین کاربر را قادر میسازد زمین را بهصورت سهبعدی ببیند. امروزه کامپیوترهای تخصصی وجود دارد بستههای نرمافزاری که به کاربران امکان میدهد محاسبات کمی ارتفاع را مستقیماً از آن تصویربرداری استریوسکوپی انجام دهند. هنگامی که تعداد زیادی از این اندازهگیریها انجام میشود، یک سطح ارتفاع/ DEM را میتوان بهدست آورد. روشدوم مرتبط، تداخلسنجی راداری است. تفاوت در سیگنالهای رادار بهدست آمده در یک منطقه از موقعیتهای مختلف میتواند برای ایجاد یک سطح ارتفاع استفاده شود. روش سوم استخراج دادههای ارتفاعی استفاده از دادههای LiDAR است. بیشتراوقات، مجموعه دادههای LiDAR منجر بهیکسری نقاط x، y، z میشود. هنگامیکه نقاطی که از زمین منعکس شدهاند از نقاطی که از اجسام دیگر منعکس شده اند جدا میشوند در بالای سطحزمین، یک سطحرقومی که نمایانگر زمین است را میتوان ایجاد کرد. دادههای قدیمی از سنجش از راه دور اغلب ارزشمند هستند زیرا ممکن است تنها اطلاعات دادههای بلندمدت برای گستره وسیعی از جغرافیا را ارائه دهند. در همانزمان، دادهها اغلب برای تفسیر پیچیده و برای ذخیرهسازی حجیم است. سیستمهای مدرن تمایل دارند دادهها را بهصورترقومی، اغلب با فشردهسازی بدون تلفات، ذخیره کنند. یکی از بهترین سیستمها برای آرشیو دادهها سری بهصورت کامپیوتری قابل خواندن است. آنها را میتوان ایجاد، کپی ، توسط سیستمهای خودکار بایگانی و بازیابی شده است. آنها به اندازه آرشیو رسانههای مغناطیسی فشرده هستند و در عینحال میتوانند توسط انسانها با حداقل، استاندارد تجهیزات خوانده شوند.
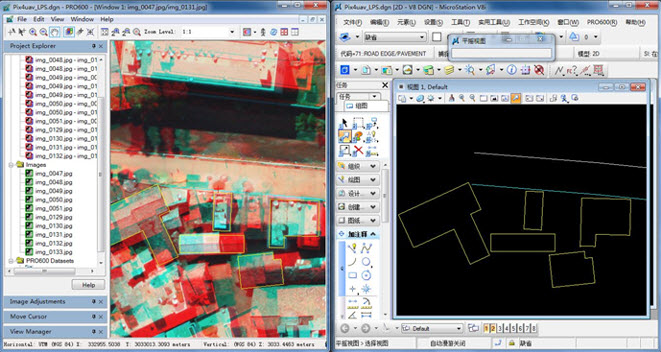
نرمافزار سنجشاز راه دور
پرکاربردترین نرمافزار در سنجش از دور ESRI (سیستمهای محیطی) مؤسسه تحقیقاتی، ERDAS،RSI ENVI، MapInfo، EMapper، AutoDesk و غیره است. بیشترین نرمافزار سنجش از راه دور رایگان بهنظر میرسد تراشه (پردازشتصویر CopenHage System) برای ویندوز و تعداد زیادی نرمافزار محبوب رایگان و متنباز گزینههایی برای تجزیه و تحلیل دادههای سنجش از راه دور، از APIهای برنامهنویسی و ابزارهایی مانندGDAL، تا برنامههای دسکتاپ کامل مانند GRASS GIS و OpenEV هستند.
کاربردهای سنجش از دور و GIS
سنجش ازدور ابزارمهمی برای ارائه اطلاعات مهم در موردخاک، ارزیابیزمین، تخریبزمین، توزیعمحصول، رشد محصول، در دسترسبودن منابع آب و غیره است. اطلاعات سنجش از راه دور را میتوان درکارایی ترکیب با فن آوریهای مرسوم / بررسیهای زمینی و همچنین ابزارهای پیشرفته مانند GIS برای تجزیه و تحلیل و تفسیر آن بهبود بخشید.
دادههای سنجش از دور بهصورت رقومی در دسترس هستند و میتوانند بهعنوان لایه ورودی نرمافزار GIS استفاده شوند. نرمافزاری مانند ArcInfo/ERDAS که از هر دو راه دور دادههای سنجش و GIS پشتیبانی می کند. ظهور فنآوری در ظرفیت ذخیرهسازی، پردازش قابلیتها، پایگاههای اطلاعاتی رابطهای و رابطکاربری گرافیکی پیشرفتهتر داده قابلیت کار بر روی دادههای سنجش از دور و GIS برای تجزیه و تحلیل و تفسیر دادهها است. استفاده از GIS در ترکیب با سنجش از دور، تصمیمگیری را به روشهای زیر افزایش میدهد:
• شناسایی فرآیند برای امکان مقایسه اکتسابهای مختلف در طولزمان
- شناسایی مشکلات کشاورزی و سایر مشکلات انکشافی
- ارزیابی مداخلات فنی احتمالی برای حفاظت یا احیا معیارها
- نظارت بر فرآیندهای تخریب خاک، آب و زمین.
-
پایگاههای اطلاعات تولید محصولات زراعی
از پایگاه داده تولید محصول برای دانستن تعداد هکتار کشت شده استفاده میشود ، جایی که کشت صورت گرفته و احتمال تولید غذا چگونه خواهد بود. سطح و تولید محصولات مختلف را میتوان با کمک سنجش از دور و کاربردهای GIS ارزیابی کرد. توزیع محصول به مدلسازی اقلیم و سایر محیطها تغییرات و اثرات آن بر کشاورزی کمک میکند.
رشد محصول و تعیین عملکرد:
رشد و عملکرد محصول توسط تعدادی از عوامل مانند ژنتیک پتانسیل رقم محصول، خاک، آب و هوا، شیوههای کشت مانند تاریخکاشت، مقدار آبیاری و کود و تنشهای زیستی تعیین میشود. با اینحال، بهطورکلی برای یک منطقه معین، عملکرد سالبهسال است تغییرپذیری بیشتر از طریق آب و هوا بهعنوان پیشبینی با استفاده از رویکرد تجربی یا شبیهسازی محصول مدلسازی شده است. با راهاندازی و در دسترس بودن مداوم حسگرهای چندطیفی (مرئی، مادونقرمزنزدیک) در مدار قطبی دادههای سنجش از دور ماهوارههای رصدزمین به ابزار مهمی برای مدلسازی بازده تبدیل شده است. دادههای RS تخمین بهموقع، دقیق، همدیدی و عینی محصول شرایط رشد یا رشدمحصول برای توسعه مدلهای عملکرد و صدور عملکرد پیشبینیها در طیف وسیعی از مقیاسهای فضایی را ارائه میدهند. دادههای RS مزیت خاصی نسبت به مشاهدات هواشناسی برای مدلسازی عملکرد، مانند پوششرصدی متراکم، مشاهده مستقیم محصول و توانایی گرفتن اثر عوامل غیرهواشناسی آن دارند. ادغام این سه فنآوریها، بهعنوان مثال، مدلهای شبیهسازی محصول، دادههای RS و GIS میتوانند ارائه یکراه حل عالی برای نظارت و مدلسازی محصول در طیفوسیعی از مقیاسهای مکانی باشد.
نظارت بر محصول
استفاده از GIS به همراه دادههای RS برای پایش محصول رویکرد در تمام مراحل فعالیت، یعنی مقدماتی، تحلیل و خروجی ثابت شده است. در مرحله مقدماتی فاز GIS برای (الف) طبقهبندی/ پهنهبندی با استفاده از یک یا چند ورودی استفاده میشود لایهها (اقلیم، خاک، فیزیوگرافی، تسلط بر محصول و غیره)، یا (ب) تهیه داده های ورودی (آب و هوا، خاک و دادههای جانبی) که در فرمتهای مختلف به یک فرمت رایج موجود است.
در مرحله تحلیل، استفاده از GIS عمدتاً از طریق عملیات بر روی لایههای رستری NDVI یا محاسبه نیمرخ های VI در محدودههای اداری مشخص شده میباشد. مرحله خروجی نهایی همچنین شامل GIS برای تجمیع و نمایش خروجیها برای مناطق تعریفشده (بهعنوانمثال، مناطق اداری) و ایجاد محصولات خروجی نقشه با ادغام دادهها از طریق همپوشانی نیاز است.
جمعبندی
استفاده از فنآوری سنجش از دور بهسرعت در حال گسترش است توسعه همه بخشهایی که شامل کشاورزی نیز میشود. تکنیکهای سنجش از دور همچنان عامل بسیار مهمی در بهبود سیستم فعلی کسب اطلاعات کشاورزی خواهد بود. سنجش از دور بسترهای مختلفی را برای بررسی کشاورزی فراهم میکند. تصاویر ماهواره ای توانایی منحصربهفردی برای ارائه سینوپتیک واقعی دارند نمایی از یکمنطقه بزرگ در یکزمان، که برای روشهای مرسوم نظرسنجی و همچنین فرآیند دادهها امکانپذیر نیست اکتساب و تجزیه و تحلیل از طریق سیستم اطلاعات جغرافیایی در مقایسه با روشهای مرسوم سیار سریع است. اهمیت کاربردهای سنجش از دور با اشاره بهبخش کشاورزی شامل کاربری زمین الگوی، تولیدمحصول، تعیینعملکردمحصول، و نظارتبرمحصول است.