کلید واژه ها:
آنتروپی اطلاعات ; SRTM1 DEM ; ASTER GDEM V3 ; AW3D30 DEM ; همجوشی DEM ; شهر تایوان
۱٫ مقدمه
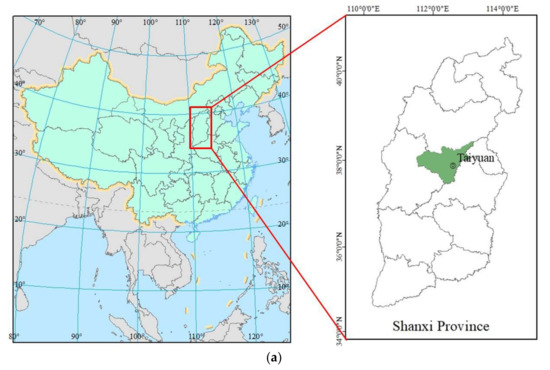
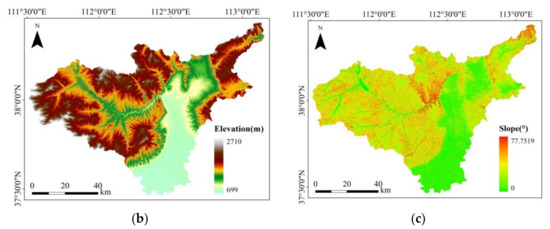
۲٫ حوزه و داده های تحقیق
داده های آزمایشی دارای همان مبنا ارتفاع [ ۳۱ ، ۳۲ ] هستند و تفاوت بین نیمه محور طولانی بیضی GRS80 و بیضی WGS84 بسیار کم است، بنابراین خطای بین دو بیضی ناچیز است [ ۳۳ ]. تفاوت بین نیمه محور طولانی بیضی WGS84 و بیضی Topex/Poseidon حدود ۷۰-۷۲ سانتی متر است و با استفاده از رابطه (۱) بیضی WGS84 و مقادیر ارتفاع GRS80 در زیر بیضی را به بیضی Topex/Poseidon تبدیل می کنیم. [ ۳۴ ]. سپس، دادههای بردار مرز اداری برای برش سه داده DEM برای به دست آوردن دادههای ورودی ثابت برای مبدأ افقی، مبدأ ارتفاع، بیضی مرجع و منطقه مورد مطالعه استفاده شد.
۳٫ روش ها
۳٫۱٫ آنتروپی اطلاعات فاکتور توپوگرافی
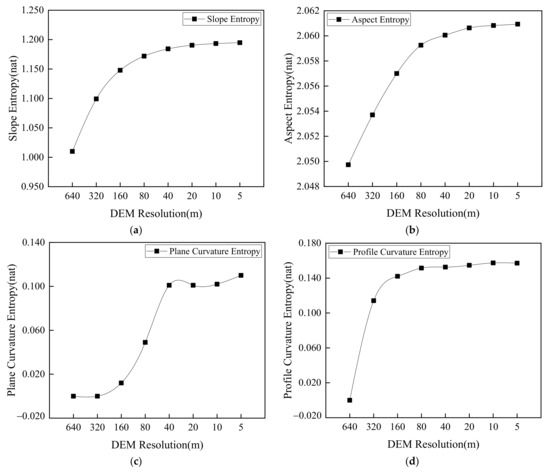
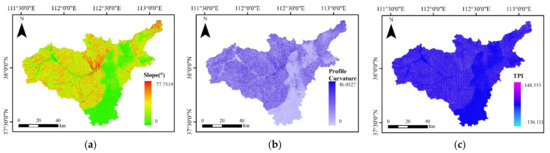
DEM با رزولوشن های متفاوت با نمونه برداری مجدد از داده های ورودی با ArcGIS تولید شد. و آنتروپی اطلاعات چهار عامل توپوگرافی مانند شیب، جهت، انحنای صفحه و انحنای پروفیل با استفاده از معادله زیر برای تعیین بهترین وضوح DEM در منطقه تحقیق محاسبه شد [ ۴۴ ، ۴۵ ]:
که در آن H آنتروپی اطلاعات است. P i درصد مساحت اشغال شده توسط ضریب توپوگرافی P i ε (۰,۱) است.
۳٫۲٫ بدست آوردن ضرایب وزنی بهینه بر اساس جستجوی پیمایش
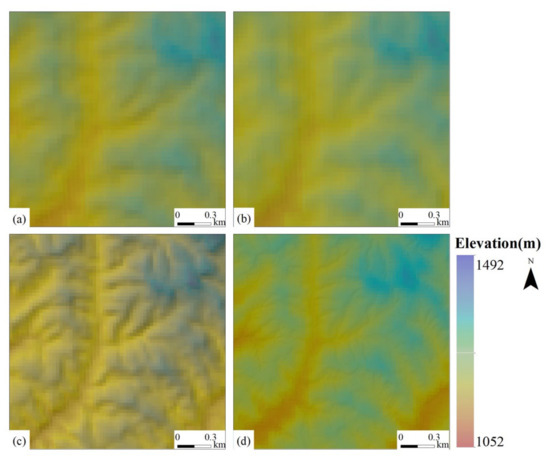
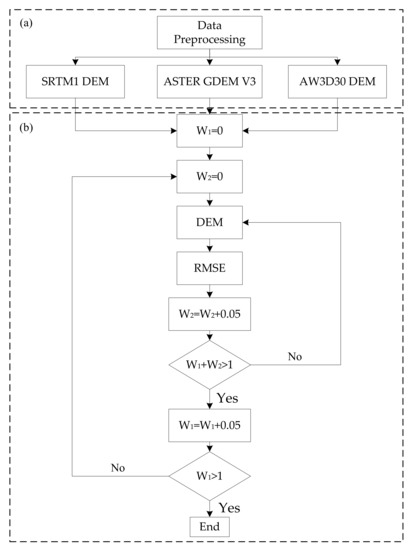
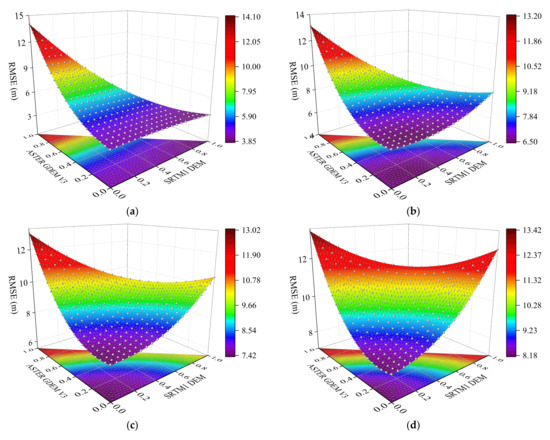
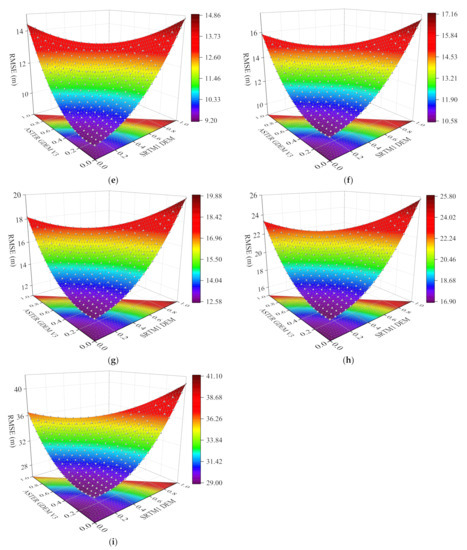
طیف گسترده ای از داده های DEM باز جهانی با وضوح، دقت و کیفیت داده های مختلف در دسترس است. بسیاری از محققین برای ارزیابی کیفیت دادههای خود، مقایسههای دقت بین مجموعههای دادههای متعدد را تکمیل کردهاند. با توجه به ادبیات [ ۴۸ ]، AW3D30 DEM دقت بالاتری دارد و بهتر می تواند موج واقعی زمین را نشان دهد. در نتیجه، مطالعه از AW3D30 DEM به عنوان خط پایه استفاده میکند، شیب را استخراج میکند و با استفاده از ArcGIS با استفاده از روش فاصله طبیعی با فواصل ۵ درجه، ۱۰ درجه، ۱۵ درجه، ۲۰ درجه، ۲۵ درجه، ۳۰، شیب را استخراج میکند و آن را به ۹ سطح تقسیم میکند. درجه، ۳۵ درجه و ۴۵ درجه، به شیب۱-slope9 تغییر نام داد. سپس داده های اصلی مربوط به SRTM1i، ASTER GDEM V3i، و AW3D30i با استفاده از slopei استخراج می شوند، جایی که i ϵ [۱,۹]. در نهایت، DEM ذوب شده با استفاده از رابطه زیر محاسبه می شود:
که در آن Fused DEM نشان دهنده DEM ذوب شده است. W ۱ و W ۲ وزن SRTM1 و ASTER GDEM V3 را در همجوشی نشان می دهند، W ۱ و W ۲ ε [۰,۱]. RMSE هر DEM ذوب شده به دست آمده در شیب با معادله زیر محاسبه می شود:
که در آن Fused DEM نشان دهنده DEM ذوب شده است. ۵mDEM نشان دهنده DEM مرجع با وضوح ۵ متر است و n تعداد نقاط ارتفاعی است که در محاسبه پیکسل به پیکسل نقش دارند.
۴٫ نتایج
۴٫۱٫ آنتروپی اطلاعات فاکتور توپوگرافی
۴٫۲٫ ضرایب وزنی بهینه
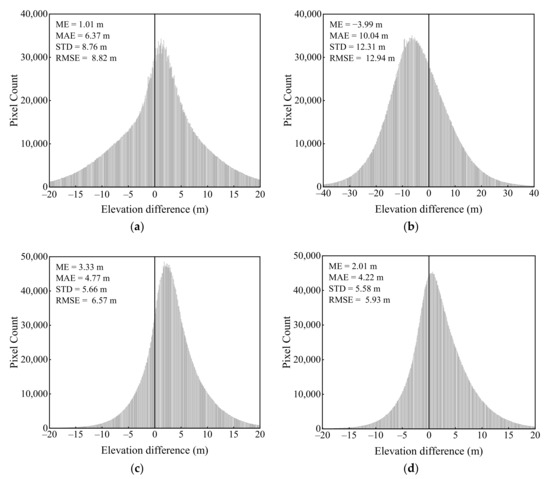
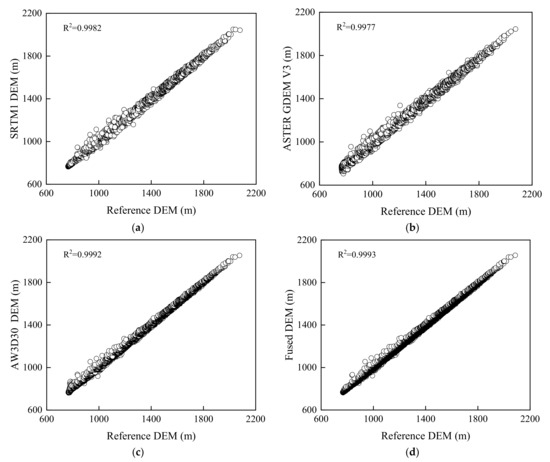
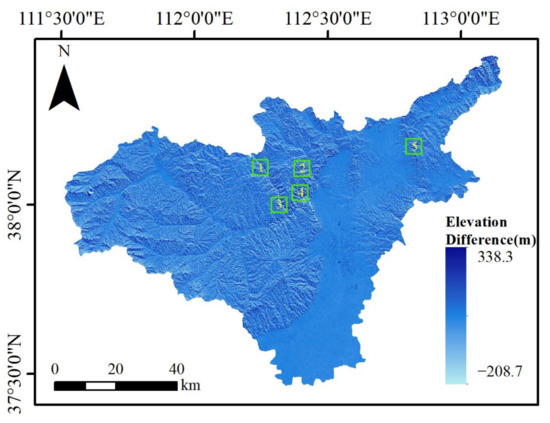
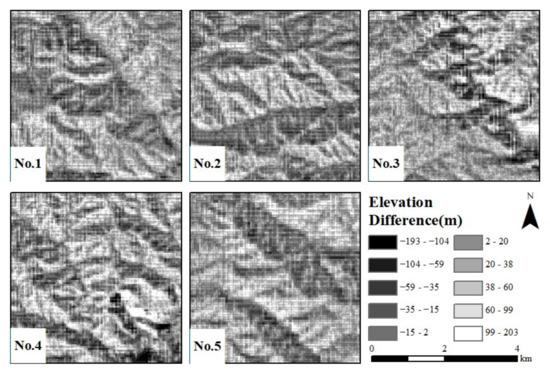
۴٫۳٫ ارزیابی طرح فیوژن
۵٫ بحث
۶٫ نتیجه گیری
منابع
- تانگ، جی. پیشرفت DEM و تجزیه و تحلیل زمین دیجیتال در چین. Acta Geogr. گناه ۲۰۱۴ ، ۶۹ ، ۱۳۰۵-۱۳۲۵٫ [ Google Scholar ] [ CrossRef ]
- شیونگ، ال. تانگ، جی. یانگ، ایکس. لی، ف. تجزیه و تحلیل زمین دیجیتال مبتنی بر ژئومورفولوژی: پیشرفت و چشم اندازها. جی. جئوگر. علمی ۲۰۲۱ ، ۳۱ ، ۴۵۶-۴۷۶٫ [ Google Scholar ] [ CrossRef ]
- لاکشمی، SE; Yarrakula، K. بررسی و تحلیل انتقادی بر روی مدلهای ارتفاعی دیجیتال. Geofizika ۲۰۱۸ ، ۳۵ ، ۱۲۹-۱۵۷٫ [ Google Scholar ] [ CrossRef ]
- پولیدوری، ال. El Hage، M. روش های ارزیابی کیفیت مدل ارتفاعی دیجیتال: یک بررسی انتقادی. Remote Sens. ۲۰۲۰ , ۱۲ , ۳۵۲۲٫ [ Google Scholar ] [ CrossRef ]
- سلیم، ن. هاک، م. توماسی، نیویورک؛ جاوید، ا. سجاد، الف. پارامترهای مشتق شده از و/یا استفاده شده با مدل های رقومی ارتفاع (DEMs) برای نقشه برداری حساسیت زمین لغزش و ارزیابی خطر زمین لغزش: یک بررسی. ISPRS Int. J. Geoinf. ۲۰۱۹ ، ۸ ، ۵۴۵٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- بی، اچ. لی، ایکس. گو، ام. لیو، ایکس. Li, J. تجزیه و تحلیل زمین دیجیتال بر اساس DEM. جلو. برای. چین ۲۰۰۶ ، ۱ ، ۵۴-۵۸٫ [ Google Scholar ] [ CrossRef ]
- متوالی، م. بازان، TM; Eltohamy, F. طراحی تلسکوپ های ماهواره ای با وضوح بسیار بالا قسمت اول: طراحی سیستم نوری. IEEE Trans. هوانوردی الکترون. سیستم ۲۰۱۹ ، ۵۶ ، ۱۲۰۲-۱۲۰۸٫ [ Google Scholar ] [ CrossRef ]
- موکرجی، اس. جوشی، پی کی; موکرجی، اس. قوش، ع. Garg، RD; Mukhopadhyay, A. ارزیابی دقت عمودی مدل منبع باز دیجیتال ارتفاعی (DEM). بین المللی J. Appl. زمین Obs. Geoinf. ۲۰۱۳ ، ۲۱ ، ۲۰۵-۲۱۷٫ [ Google Scholar ] [ CrossRef ]
- هاوکر، ال. بیتس، پی. نیل، جی. Rougier, J. دیدگاههای شبیهسازی مدل رقومی ارتفاع (DEM) برای مدلسازی سیل در غیاب یک DEM جهانی دسترسی باز با دقت بالا. جلو. علوم زمین ۲۰۱۸ ، ۶ ، ۲۳۳٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Liu, X. Airborne LiDAR برای نسل DEM: برخی مسائل مهم. Prog. فیزیک Geogr. ۲۰۰۸ ، ۳۲ ، ۳۱-۴۹٫ [ Google Scholar ] [ CrossRef ]
- اویسال، م. توپراک، ع. نسل پولات، N. DEM با فتوگرامتری پهپاد و آنالیز دقت در تپه Sahitler. اندازه گیری ۲۰۱۵ ، ۷۳ ، ۵۳۹-۵۴۳٫ [ Google Scholar ] [ CrossRef ]
- گلاتز، م. پایلو، پی. چن، CW; Zebker، HA مطالعه تطبیقی استریو رادار و تداخل سنجی برای تولید DEM. در مجموعه مقالات کارگاه آموزشی FRINCE 2003، Frascati، ایتالیا، ۱-۵ دسامبر ۲۰۰۳٫ [ Google Scholar ]
- O’Loughlin، FE; پایوا، RCD؛ دیورند، م. آلسدورف، دی. بیتس، PD یک رویکرد چند حسگر به سمت یک پوشش گیاهی جهانی محصول SRTM DEM را تصحیح کرد. سنسور از راه دور محیط. ۲۰۱۶ ، ۱۸۲ ، ۴۹-۵۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رویتر، HI; نلسون، ا. Jarvis, A. ارزیابی روشهای درونیابی پر کردن فضای خالی برای داده های SRTM. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۷ ، ۲۱ ، ۹۸۳-۱۰۰۸٫ [ Google Scholar ] [ CrossRef ]
- لی، اس. در آغوش گرفتن.؛ چنگ، ایکس. شیونگ، ال. تانگ، جی. Strobl, J. ادغام دانش توپوگرافی در یادگیری عمیق برای پر کردن فضای خالی مدل های ارتفاعی دیجیتال. سناتور از راه دور محیط زیست. ۲۰۲۲ ، ۲۶۹ ، ۱۱۲۸۱۸٫ [ Google Scholar ] [ CrossRef ]
- کرکی، م. مباشر، BL; Aziz, SA بهبود کیفیت مدلهای ارتفاع دیجیتال دامنه عمومی از طریق ترکیب دادهها. Biosyst. مهندس ۲۰۰۸ ، ۱۰۱ ، ۲۹۳-۳۰۵٫ [ Google Scholar ] [ CrossRef ]
- رائو، YS؛ رائو، KS؛ ونکاتارامان، جی. خاره، م. Reddy، CD مقایسه DEM های مشتق شده از INSAR و تکنیک های استریو نوری. در مجموعه مقالات کارگاه FRINGE در مورد تداخل سنجی ERS SAR، Frascati، ایتالیا، ۱-۵ دسامبر ۲۰۰۳٫ [ Google Scholar ]
- دنگ، س. ژانگ، جی. لی، پی. Huang, G. DEM Fusion و کاربرد آن در نقشه برداری توپوگرافی مناطق پیچیده. در مجموعه مقالات سمپوزیوم بین المللی ۲۰۱۱ در مورد تلفیق تصویر و داده، Tengchong، چین، ۱-۴ اوت ۲۰۱۱٫ [ Google Scholar ]
- شیندلر، ک. پاپاسایکا-هانوش، اچ. شوتز، اس. Baltsavias، E. بهبود DEM های گسترده از طریق فرصت ها و محدودیت های ترکیبی داده ها. Proc. فتوگرام هفته ۲۰۱۱ ، ۱۱ ، ۱۵۹-۱۷۰٫ [ Google Scholar ]
- Tran، TA; رغوان، وی. ماسوموتو، اس. وینایارج، پ. Yonezawa، G. یک رویکرد مبتنی بر ژئومورفولوژی برای مطالعه موردی همجوشی مدل ارتفاعی دیجیتال در شهر دانانگ، ویتنام. زمین گشت و گذار. دین ۲۰۱۴ ، ۲ ، ۴۰۳-۴۱۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فلورینسکی، IV; Kuryakova، GA تعیین اندازه شبکه برای مدلسازی زمین دیجیتال در بررسیهای منظر – با توزیع رطوبت خاک در مقیاس میکرو. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۰ ، ۱۴ ، ۸۱۵-۸۳۲٫ [ Google Scholar ] [ CrossRef ]
- تامپسون، جی. بل، جی سی. باتلر، CA وضوح مدل ارتفاعی دیجیتال: اثرات بر محاسبه ویژگی زمین و مدلسازی کمی خاک-منظر. ژئودرما ۲۰۰۱ ، ۱۰۰ ، ۶۷-۸۹٫ [ Google Scholar ] [ CrossRef ]
- شارما، ا. تیواری، KN; Bhadoria، PBS تعیین اندازه سلول بهینه مدل ارتفاعی دیجیتال برای کاربرد هیدرولوژیکی. J. Earth Sys. علمی ۲۰۱۱ ، ۱۲۰ ، ۵۷۳-۵۸۲٫ [ Google Scholar ] [ CrossRef ]
- ژو، سی. ژانگ، جی. یانگ، ز. آئو، ام. لیو، ز. Zhu, J. یک روش وابسته به زمین تطبیقی برای اصلاح DEM SRTM در مناطق کوهستانی. دسترسی IEEE ۲۰۲۰ ، ۸ ، ۱۳۰۸۷۸–۱۳۰۸۸۷٫ [ Google Scholar ] [ CrossRef ]
- یانگ، ال. منگ، ایکس. Zhang, X. SRTM DEM و پیشرفت های کاربردی آن. بین المللی J. Remote Sens. ۲۰۱۱ , ۳۲ , ۳۸۷۵-۳۸۹۶٫ [ Google Scholar ] [ CrossRef ]
- ویدال، دی جی; برتار، اف. Bjerke, P. مقایسه تصاویر ماهواره ای RADARSAT-1 و IKONOS برای تشخیص ویژگی های شهری. Inf. فیوژن ۲۰۰۵ ، ۶ ، ۲۴۳-۲۴۹٫ [ Google Scholar ] [ CrossRef ]
- اوئما، ای. آهی، س. مونتیبلر، بی. مورو، م. Kmoch، A. دقت عمودی مدلهای ارتفاعی دیجیتال جهانی آزادانه در دسترس (ASTER، AW3D30، MERIT، TanDEM-X، SRTM، و NASADEM). Remote Sens. ۲۰۲۰ , ۱۲ , ۳۴۸۲٫ [ Google Scholar ] [ CrossRef ]
- عبداللهد، ف. احمد، ع. عبدالله، ع. محمد، من. استخراج و تجزیه و تحلیل خطواره های زمین شناسی با ترکیب داده های تصویری ASTER-GDEM و Landsat 8 در اطلس مرتفع مرکزی مراکش. نات. خطرات ۲۰۲۱ ، ۱-۲۳٫ [ Google Scholar ] [ CrossRef ]
- بولتون، اس جی; استوکس، ام. کدام DEM برای تجزیه و تحلیل توسعه چشم انداز رودخانه ای در زمین های کوهستانی بهترین است. ژئومورفولوژی ۲۰۱۸ ، ۳۱۰ ، ۱۶۸-۱۸۷٫ [ Google Scholar ] [ CrossRef ]
- تاکاکو، جی. تادونو، تی. تسوتسویی، ک. Ichikawa، M. اعتبارسنجی dsm جهانی ‘aw3d’ تولید شده از ALOS PRISM. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۶ ، ۳ ، ۱۲-۱۹٫ [ Google Scholar ] [ CrossRef ]
- تادونو، تی. ایشیدا، اچ. اودا، اف. نایتو، اس. میناکاوا، ک. Iwamoto، H. تولید دقیق DEM جهانی توسط ALOS PRISM. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۴ ، ۲ ، ۷۱-۷۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رودریگز، ای. موریس، CS; Belz, JE ارزیابی جهانی عملکرد SRTM. فتوگرام مهندس Remote Sens. ۲۰۰۶ ، ۷۲ ، ۲۴۹-۲۶۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یوان، ایکس. لی، جی. گائو، ایکس. ژانگ، دبلیو. Lu, J. ارزیابی کیفیت ارتفاع داده AW3D 30 متر DSM و اعتبار سنجی دقیق منطقه معمولی. Geomat. تف کردن Inf. تکنولوژی ۲۰۱۸ ، ۴۱ ، ۹۸-۱۰۱٫ [ Google Scholar ] [ CrossRef ]
- بغدادی، ن. لمارکوند، ن. عبدالله، ح. Bailly, JS ارتباط داده های ارتفاعی GLAS/ICESat برای نظارت بر شبکه های رودخانه. Remote Sens. ۲۰۱۱ , ۳ , ۷۰۸-۷۲۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چانگ، ز. Wu, L. Mountain Grid DEM فشرده سازی داده ها بر اساس تبدیل موجک و کدگذاری آنتروپی مختلط. Geogr. Geo-Inf. علمی ۲۰۰۴ ، ۱ ، ۲۴-۲۷٫ [ Google Scholar ] [ CrossRef ]
- هو، ال. او، ز. لیو، جی. Zheng, C. روش برای اندازهگیری محتوای اطلاعاتی زمین از مدلهای ارتفاعی دیجیتال. آنتروپی ۲۰۱۵ ، ۱۷ ، ۷۰۲۱-۷۰۵۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، ایکس. لیو، جی. کانگ، جی. تجزیه و تحلیل اطلاعات زمین با استفاده از تطبیق ارتفاع بر اساس آنتروپی. J. Appl. علمی ۲۰۰۶ ، ۲۴ ، ۶۰۸-۶۱۲٫ [ Google Scholar ] [ CrossRef ]
- چن، ز. بله، اف. فو، دبلیو. که، ی. هنگ، اچ. تأثیر تفکیک فضایی DEM بر نقشهبرداری حساسیت زمین لغزش در حوضه رودخانه باکسی، شمال غربی چین. نات. خطرات ۲۰۲۰ ، ۱۰۱ ، ۸۵۳-۸۷۷٫ [ Google Scholar ] [ CrossRef ]
- هائو، ز. چی، سی. وانگ، ال. وانگ، ی. تحلیل مقدماتی رزولوشن دادههای فضای دم. Adv. علوم زمین ۲۰۰۵ ، ۲۰ ، ۴۹۹-۵۰۴٫ [ Google Scholar ] [ CrossRef ]
- موکرجی، اس. موکرجی، اس. بهاردواج، ا. موخوپادهایای، ع. Garg، RD; Hazra, S. دقت Cartosat-1 DEM و ویژگی مشتق شده از آن در نمایش مقیاس چندگانه. J. Earth Sys. علمی ۲۰۱۵ ، ۱۲۴ ، ۴۸۷-۴۹۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Borkowski، A. در مورد اندازه سلول شبکه بهینه برای مدلهای زمین دیجیتال درونیابی شده از نقشههای خطوط کانتور، Scientarum Polonorum. Geod. شرح Terrarum ۲۰۰۲ ، ۱ ، ۱۵-۲۲٫ [ Google Scholar ]
- Becek، K. یک نمایش دیجیتالی ثابت σ از یک میدان اسکالر تصادفی. در ژئودزی برای سیاره زمین ; Springer: برلین/هایدلبرگ، آلمان، ۲۰۱۲; صص ۷۲۵-۷۳۱٫ [ Google Scholar ]
- Raposo، P. تعمیم متغیر DEM با استفاده از آنتروپی محلی برای نمایش زمین از طریق مقیاس. بین المللی جی. کارتوگر. ۲۰۲۰ ، ۶ ، ۹۹-۱۲۰٫ [ Google Scholar ] [ CrossRef ]
- Wise, S. آنتروپی اطلاعات به عنوان معیاری برای کیفیت DEM. محاسبه کنید. Geosci. ۲۰۱۲ ، ۴۸ ، ۱۰۲-۱۱۰٫ [ Google Scholar ] [ CrossRef ]
- وی، ال. هائو، ز. Li, L. ارزیابی مبتنی بر آنتروپی اطلاعات DEM با تفکیک پذیری های مختلف و اثرات آن بر شبیه سازی رواناب. برق آبی انرژی ۲۰۰۴ ، ۴ ، ۱-۴٫ [ Google Scholar ] [ CrossRef ]
- Xu، QY; بله، جی. Lyu, YJ یک روش مدلسازی ترکیب دادههای چند منبعی برای مهندسی جلوگیری از جریان زباله. J. Mt. Sci. ۲۰۲۱ ، ۱۸ ، ۱۰۴۹-۱۰۶۱٫ [ Google Scholar ] [ CrossRef ]
- پتراسووا، آ. میتاسووا، اچ. پتراس، وی. Jeziorska، J. ترکیب DEM های با وضوح بالا برای مدل سازی جریان آب. Geospat را باز کنید. نرم افزار داده ایستادن. ۲۰۱۷ ، ۲ ، ۶٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- جین، AO; تاکر، تی. چاوراسیا، ا. پاتل، پی. سینگ، AK ارزیابی دقت عمودی SRTM-GL1، GDEM-V2، AW3D30 و CartoDEM-V3. ۱ از وضوح ۳۰ متر با فرکانس دوگانه GNSS برای حوضه تاپی پایین هند. Geocarto Int. ۲۰۱۸ ، ۳۳ ، ۱۲۳۷-۱۲۵۶٫ [ Google Scholar ] [ CrossRef ]
- چوبسکی، ک. کوزاک، جی. Kolecka، N. دقت داده های ارتفاعی SRTM-X و ASTER و تأثیر آن بر مدل سازی توپوگرافی و هیدرولوژیکی: مطالعه موردی کوه های Pieniny. در لهستان. بین المللی J. Geoinform. ۲۰۱۳ ، ۹ ، ۷-۱۴٫ [ Google Scholar ] [ CrossRef ]
- دیکسون، بی جی; Beier, P. کمیت کردن تأثیر موقعیت توپوگرافی بر حرکت کوگار (Puma concolor) در جنوب کالیفرنیا، ایالات متحده. جی. زول. ۲۰۰۷ ، ۲۷۱ ، ۲۷۰-۲۷۷٫ [ Google Scholar ] [ CrossRef ]
- Fuss, CE; برگ، AA; لیندسی، JB DEM Fusion با استفاده از یک الگوریتم خوشهبندی k-means اصلاح شده. بین المللی جی دیجیت. زمین ۲۰۱۶ ، ۹ ، ۱۲۴۲-۱۲۵۵٫ [ Google Scholar ] [ CrossRef ]
- ستییوکو، ا. آریمورتی، AM; بصارالدین، مفهوم همجوشی T. DEM بر اساس روش کوکریجینگ LS-SVM. بین المللی J. Image Data Fusion ۲۰۱۹ ، ۱۰ ، ۲۴۴–۲۶۲٫ [ Google Scholar ] [ CrossRef ]
- کای، جی. شن، دی. ژانگ، ا. یو، اچ. Zhang, X. یک روش همجوشی DEM برای صعود و نزول مدار StereoSAR DEM در مناطق کوهستانی پیچیده با در نظر گرفتن شدت پژواک SAR. J. Mt. Sci. ۲۰۲۱ ، ۱۸ ، ۱۰۱-۱۱۰٫ [ Google Scholar ] [ CrossRef ]