۱٫ معرفی
با توجه به افزایش تعداد کاربردهای مختلف اطلاعات جغرافیایی، چالشهای جدیدی در زمینه تصویرسازی جغرافیایی و طراحی نقشه ظاهر میشود. یکی از آنها تجسم فضای داخلی ساختمان ها است. این امر به عنوان مثال در برنامه تحقیقاتی سیستم های مبتنی بر مکان (LBS) مشهود است [ ۱]، جایی که نویسندگان خاطرنشان میکنند: «تقاضای فزاینده برای گسترش LBS از فضای باز به داخل، و از سیستمهای ناوبری و راهنمای تلفن همراه به برنامههای متنوعتر (به عنوان مثال، مراقبتهای بهداشتی، حملونقل، و بازی) وجود داشته است.» این، در میان چیزهای دیگر، به این دلیل است که هم سیستم های موقعیت یابی داخلی و هم نیازهای کاربران در حال توسعه و رشد هستند. موقعیت یابی از سیگنال روترهای Wi-Fi، بیکن هایی که از فناوری بلوتوث، فرستنده های UWB (باند فوق عریض)، برچسب های RFID (شناسایی فرکانس رادیویی) استفاده می کنند یا از اندازه گیری های میدان مغناطیسی استفاده می کند [ ۲ ، ۳ ، ۴ ، ۵ ، ۶ ، ۷ ]. موقعیت یابی مبتنی بر تصویر دستگاه های تلفن همراه راه حل جالب دیگری است که توسط لیانگ و همکاران در [ ۸ ] ارائه شده است.]. اینها تنها چند نمونه از روشها از فهرست بسیار طولانی فناوریهایی هستند که امروزه آزمایش و اجرا شدهاند. ادبیات گسترده ای در مورد این موضوع وجود دارد، اما مسئله روش موقعیت یابی خود خارج از حوصله مقاله است.
اهمیت فزاینده تحقیقات در زمینه نقشه برداری داخلی به طور کامل توسط چن و همکاران، در کار خود [ ۹ ] تجزیه و تحلیل شد، که در آن نقش بالقوه نقشه برداری در زمینه نوظهور نقشه برداری داخلی نشان داده شد.
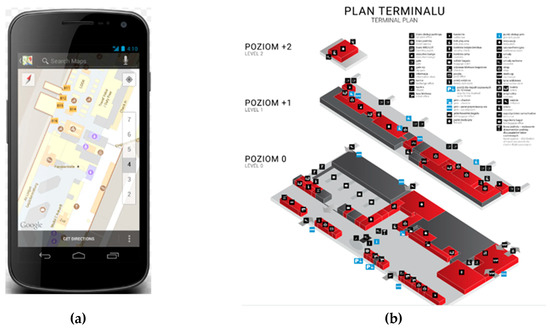
چالش تنها برنامه های کاربردی جدید نیست، بلکه روش استفاده از منابع داده های مکانی جدید است. در زمینه نقشه برداری داخلی، مدل سازی اطلاعات ساختمان (BIM)، مدل های CAD و سیستم های اطلاعات جغرافیایی سه بعدی (GIS) اهمیت ویژه ای پیدا می کند. بر اساس این مدلها یا بهترین نقشههای معماری و ساختمانی موجود، سازندگان برنامههای ناوبری و GIS، اغلب مدلهای دوبعدی ایجاد میکنند و اطلاعات مربوط به ابعاد سوم را از دست میدهند یا آن را به روشی بسیار ساده نشان میدهند. این به این دلیل است که همه برنامهها نمیتوانند از مدلهای سه بعدی استفاده کنند، یا مفهومی برای استفاده کامل از دادههای موجود در نقشههای ساختوساز کلاسیک وجود ندارد. یک مثال می تواند تجسم های داخلی موجود باشد، به عنوان مثال، در Google Maps یا در کیوسک های اطلاعات فرودگاه ( شکل ۱ a,b).
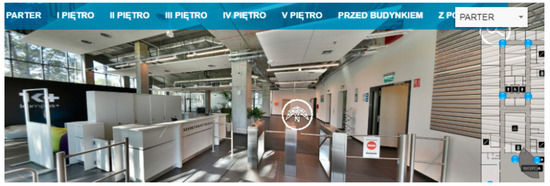
ماکوچون و دوناتیس در مقاله [ ۷ ] نشان میدهند که راهحلهای فنآوری موجود برای ایجاد مدلهای ساختمان داخلی برای کاربردهای ناوبری، مانند Indoor Atlas، فقط امکان به دست آوردن دادهها را برای هر طبقه به طور جداگانه فراهم میکند. مدلهای ساختمانی همچنین برای مدیریت ساختمانهای دنیای واقعی یا بازیها استفاده میشوند. با این حال، چندین محدودیت را می توان مشاهده کرد، به عنوان مثال، در تور مجازی ساختمان مرکز مدیریت نوآوری و انتقال فناوری واقع در پردیس دانشگاه فناوری ورشو (CZIiTT PW) ( شکل ۲ ). در این مورد، ارائه های دو بعدی برای هر طبقه نیز به طور جداگانه قابل مشاهده است.
مشکل تجسم و ذخیره سازی داده ها برای ساختمان های چند طبقه توسط Gotlib و Karabin در تحقیقات خود در مورد راه حل های کاداستر ارائه شده در [ ۱۱ ] مورد توجه قرار گرفته است و ادعا می کنند که نمی توان به طور موثر تمام طبقات را به عنوان یک تجسم کارتوگرافی معمولی و دوبعدی تجسم کرد. همه پیش بینی ها در یک صفحه).
ترکیب GIS، BIM، CAD و داده های به دست آمده از نقشه های ساخت و ساز سنتی، استفاده کارآمد و ایجاد تجسم نقشه برداری بر این اساس کار آسانی نیست. هنوز تعداد زیادی مطالعه در مورد این موضوع وجود ندارد و روش شناسی در حال حاضر محدود است و هنوز در حال توسعه است. بنابراین، انجام تحقیقات مرتبط با استفاده از دادههای فضایی مختلف داخلی برای یافتن روشهای جدید تجسم نقشهکشی برای توسعه تئوری و عمل کارتوگرافی مهم به نظر میرسد. همچنین شایان ذکر است که ارائه نقشه برداری سه بعدی می تواند در حوزه های مختلف اعمال شود. Protsyuk و همکاران، در مقاله خود [ ۱۲] بر روی نقشه برداری مولکولی سه بعدی تمرکز کنید. به طور مشابه، تئوری و عمل کارتوگرافی اهمیت فزاینده ای برای مدل سازی ساختمان های داخلی خواهد داشت.
راه حل های پیشنهادی تاکنون توسط هیچ نویسنده قبلی پیشنهاد نشده است. پیشنهادات ارائه شده امکان ترکیب دنیای BIM، GIS و کارتوگرافی را نشان می دهد. ما معتقدیم که نتایج ارائه شده از یکی از مراحل این مطالعات علمی مطابق با روندهای تحقیقاتی ذکر شده خواهد بود و به توسعه روشها/تکنیکهای ژئوویوالیزاسیون کمک میکند. و ممکن است توسط سایر محققان در فرآیند طراحی نقشه مفید باشد.
۲٫ آثار مرتبط
سالهاست که موضوع مدلسازی ساختمانها در حوزه معماران و مهندسان ساختمان بوده است. همانطور که توسط Stoter و همکاران بیان شد. در مقاله خود [ ۱۳ ]، اخیراً نیاز به چنین مدلهایی در میان سایر گروههای کاربران به سرعت در حال افزایش است: از تحلیلگران GIS، از طریق مدیریت اضطراری و خدمات، تا کاربران سیستمهای ناوبری یا بازیهای رایانهای. پینوس و همکاران، در [ ۱۴ ]، در میان دیگران، مروری جالب از موضوع واردات داده به موتورهای بازی ارائه کردند که در آن تمرکز نویسندگان بر تحقیق بر روی ارائه ابزارهایی است که به پر کردن شکاف بین بازی و دامنه GIS کمک می کند. “.
ناوبری داخلی یکی از برنامه های جدید است. مدل هایی که در تعیین مسیر داخلی به مقصد مفید هستند قبلاً در ادبیات توجه زیادی را به خود جلب کرده اند [ ۱۵ ، ۱۶ ، ۱۷ ]. استانداردهای مختلفی برای توصیف توپوگرافی داخلی ساختمان ها وجود دارد، به عنوان مثال، کلاس های بنیاد صنعت [IFC] که از روش BIM مشتق شده است [ ۱۸ ]، یا یک CityGML که برای این منظور اتخاذ شده است [ ۱۹ ]. روشهای شناخته شدهای برای ایجاد این مدلها بر اساس مستندات معماری و ساخت و ساز موجود با فناوری CAD [ ۲۰ ، ۲۱ ] یا روششناسی BIM [ ۲۲ ] وجود دارد.]. تحقیقات تاکید بسیار کمتری بر جنبه دیگری از عملکرد برنامه های ناوبری، یعنی تجسم صحیح فضای داخلی ساختمان داشته است. نقشهنگاران اخیراً به مدلسازی فضای داخلی ساختمانها علاقهمندتر شدهاند [ ۲۳ ، ۲۴ ] و منطقه تحقیقاتی «کارتوگرافی داخلی» در حال متمایز شدن است [ ۱ ، ۹ ، ۲۵ ].
روشی برای تجسم فضای داخلی ساختمان باید هدف ارائه و نوع دریافت کنندگان آن را در نظر بگیرد. معماران و متخصصان ساخت و ساز از روش تجسم شناخته شده و استاندارد شده استفاده می کنند که تفسیر آن در بسیاری از موارد برای افراد غیر متخصص دشوار است. وانگ و همکاران در مقاله خود [ ۲۶] استدلال می کنند که سیستم های ناوبری فعلی معمولا توجه بیش از حد کاربران را به دستگاه های تلفن همراه جلب می کنند که منجر به عدم تعامل واقعی کاربران با محیط می شود. کاربران برنامه های ناوبری به روش های بسیار ساده تری نیاز دارند که تفسیر بسیار قابل دسترس تری از محتوای ارائه شده را ممکن می سازد. آنچه در این زمینه مفید است، روش کارتوگرافی است، با اصول بسیاری که برای انتقال موثر اطلاعات در مورد فضا به کاربر غیر ماهر توسعه یافته است. این روش شامل، در میان چیزهای دیگر، اصول تعمیم کارتوگرافی، ارائه داده در مقیاس چندگانه، استفاده از قراردادهای گرافیکی شناخته شده، یا استفاده مناسب از متغیرهای بصری است.
چن و کلارک در [ ۲۷ ] استدلال میکنند که تجزیه و تحلیل مدلها و قالبهای داده مورد استفاده در مکانیابی و برنامههای ناوبری، که در آن فضای داخلی ساختمانها تجسم میشود، نشان میدهد که یا مدلها و ارائههای سه بعدی کامل یا مدلها و ارائههای دوبعدی وجود دارد.
روشهای نمایش سهبعدی جذاب بصری که برای مثال در بازیها استفاده میشوند، به یک مدل داده دقیق نیاز دارند. با این حال، با وجود افزایش تقاضا و تلاشهای فراوان در این زمینه، چنین دادههایی برای تعداد کمی از ساختمانها در دسترس است. یکی از جهتگیریهای تحقیقاتی جالب برای ایجاد مدلهای داخلی سهبعدی، نگاشت بافت محیطهای داخلی بر اساس صحنههای دوربین پیشنهاد شده توسط چنگ و همکاران، در [ ۲۸ ] است. اگرچه روشهای جمعآوری دادهها به طور مداوم در حال اصلاح هستند، هزینهها و مشکلات فنی به این معنی است که این وضعیت برای مدت طولانی تغییر نخواهد کرد [ ۱۵ ، ۱۹ ]]. علاوه بر این، تنها مدل های دو بعدی یا نقشه های فنی معماری موجود هستند و باقی خواهند ماند که علاوه بر نماهای دوبعدی، بخش های انتخابی یک ساختمان را نشان می دهند. مشکل دیگر تجسم موقعیت و مسیر کاربر در برنامه ناوبری سه بعدی است – نشان دادن آن در زمینه کل محیط دشوار است. هنوز روش های موثری در این زمینه ایجاد نشده است. در این مورد، ممکن است استفاده از فرآیند تعمیم فضایی، که اساس روش کارتوگرافی است، مفید باشد. به همین دلیل، به نظر نویسندگان، نیاز به توسعه یک روش منسجم برای ارائه داده وجود دارد، روشی که تا حد امکان مستقل از نوع و پیچیدگی مدل منبع دادههای ساختمان باشد، که در کاربردهای اطلاعات جغرافیایی مفید باشد. به ویژه، در برنامه های ناوبری.
۳٫ مواد و روشها
روش تحقیق زیر در این مقاله اتخاذ شده است: شناسایی اولیه مشکل در طول کارهای مختلف تحقیقاتی و فناوری در زمینه ناوبری داخلی، تجزیه و تحلیل ادبیات علمی برای یافتن راه حلی برای مشکل پیش آمده، توسعه مفهوم خود در طی جلسات مکرر تیم تحقیقاتی و سپس تلاش برای بررسی امکان سنجی فنی راه حل انتخاب شده. در مرحله اول کار، تصمیم گرفته شد که یک نمونه اولیه از راه حل با استفاده از فناوری GIS ساخته شود که تنها به عنوان شبیه ساز عملکرد پیشنهادی عمل می کرد. کار شامل آماده سازی داده های شبیه سازی مربوطه (مدل های ساختمان ها)، توسعه الگوریتم و کدگذاری بود. فرض بر این بود که پس از حل مثبت مشکلات انتخاب شده (به عنوان مثال، ذخیره سازی داده ها در یک پایگاه داده، تبدیل مختصات و تأیید کیفیت تجسم)، امکان ادامه مراحل بعدی تحقیق وجود خواهد داشت: اجرای نمونه اولیه در محیط دستگاه تلفن همراه و مطالعه درک کاربر (تحلیل مصاحبه متمرکز). این مرحله دوم هنوز ادامه دارد و در این مقاله توضیح داده نشده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. و تأیید کیفیت تجسم)، امکان ادامه مراحل بعدی تحقیق وجود خواهد داشت: اجرای نمونه اولیه در محیط دستگاه تلفن همراه و مطالعه درک کاربر (تحلیل مصاحبه متمرکز). این مرحله دوم هنوز ادامه دارد و در این مقاله توضیح داده نشده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. و تأیید کیفیت تجسم)، امکان ادامه مراحل بعدی تحقیق وجود خواهد داشت: اجرای نمونه اولیه در محیط دستگاه تلفن همراه و مطالعه درک کاربر (تحلیل مصاحبه متمرکز). این مرحله دوم هنوز ادامه دارد و در این مقاله توضیح داده نشده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. می توان به مراحل بعدی تحقیق ادامه داد: اجرای نمونه اولیه در محیط دستگاه تلفن همراه و مطالعه درک کاربر (تحلیل مصاحبه متمرکز). این مرحله دوم هنوز ادامه دارد و در این مقاله توضیح داده نشده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. می توان به مراحل بعدی تحقیق ادامه داد: اجرای نمونه اولیه در محیط دستگاه تلفن همراه و مطالعه درک کاربر (تحلیل مصاحبه متمرکز). این مرحله دوم هنوز ادامه دارد و در این مقاله توضیح داده نشده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. اجرای نمونه اولیه در محیط دستگاه تلفن همراه و مطالعه ادراک کاربر (تحلیل مصاحبه متمرکز). این مرحله دوم هنوز ادامه دارد و در این مقاله توضیح داده نشده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. اجرای نمونه اولیه در محیط دستگاه تلفن همراه و مطالعه ادراک کاربر (تحلیل مصاحبه متمرکز). این مرحله دوم هنوز ادامه دارد و در این مقاله توضیح داده نشده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است. نمونه اولیه با استفاده از روش تکراری ساخته شد و نتایج به دست آمده در تیم تحقیقاتی مورد بحث قرار گرفت. سپس اصلاحات انجام شد تا اثرات مفروض به دست آمد، یعنی استفاده ترکیبی از پیش بینی های افقی و عمودی ساختمان از منابع داده های مختلف. برخی از مسائل مربوط به فرآیند شناسایی یک مشکل علمی (انگیزه برای تحقیق علمی)، فناوری های کاربردی و انتخاب رشته های آزمایشی با جزئیات بیشتر در زیر توضیح داده شده است.
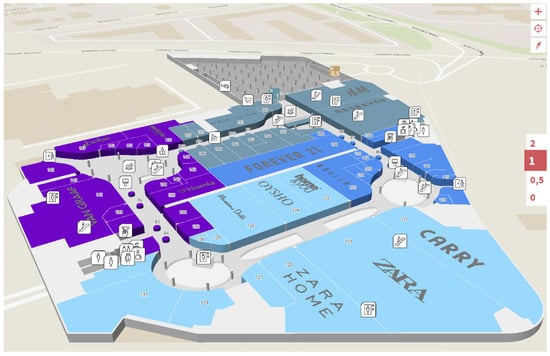
ایده توسعه روشهای تجسم جایگزین برای فضای داخلی ساختمانها پس از انجام چندین پروژه تحقیق و توسعه در زمینه سیستمهای ناوبری داخلی و مدیریت تسهیلات توسط نویسندگان مطرح شد. در این فرآیند، نویسندگان به کاستیهایی در روششناسی تجسم دادههای ساختمان برای کاربردهای اطلاعات جغرافیایی در موقعیتهایی که نقشههای معماری و ساختمانی تنها منبع دادهها هستند، اشاره کردهاند. اغلب، چنین مواردی شامل ارائه دوبعدی طبقات جداگانه است، که هنگام ایجاد انتقال اطلاعات، به عنوان مثال، برای یک برنامه ناوبری، موثر نیست. از سوی دیگر نقشه های معماری و ساختمانی حاوی داده هایی است که بعد سوم ساختمان را نیز نشان می دهد. آنها، در میان دیگران، برای ایجاد نمای آکسونومتری از یک ساختمان استفاده می شوند.شکل ۳ ). این روشی است که اغلب برای نمایش فضای داخلی یک مرکز خرید برای خریداران استفاده می شود. معمولاً فقط یک نمایش ثابت است که ساختمانی را از یک نقطه مشاهده نشان می دهد که برای کاربردهای اطلاعات جغرافیایی که توسط آن کاربران به صورت پویا موقعیت خود را تغییر می دهند کافی نیست و در آن لازم است داده ها را تجزیه و تحلیل و محاسبات انجام دهند (مثلاً مسیرهای تولید پویا) . علاوه بر این، چنین تجسمی (نمای آکسونومتری) به طور کامل از داده های موجود استفاده نمی کند و برای استفاده در برنامه های ناوبری بسیار چالش برانگیز است.
شناسایی این مشکل انگیزه ای را برای یافتن راه حل جدیدی فراهم کرده است که سادگی تجسم دو بعدی را حفظ کرده و همچنین امکان انتقال اطلاعات مربوط به ساختمان را در بعد سوم فراهم می کند. نویسندگان در مورد استفاده از سطح مقطع عمودی ساختمان ها، موجود در هر نقشه معماری و ساختمانی، برای به دست آوردن این اثر که ۲D+ نامیده می شد، تحقیق کردند. این یک راه حل میانی بین تجسم دو بعدی و سه بعدی است. ممکن است زمانی که داده های سه بعدی کامل در دسترس نیستند یا محدودیت های برنامه وجود دارد، استفاده شود. وظایف آزمایشی تکراری انجام شده شامل تلاش برای ذخیره پلان های طبقه و مقاطع در یک سیستم مختصات در یک پایگاه داده فضایی و پیوند دادن پلان ها و مقاطع طبقات با استفاده از شناسه ها بود. تلاش های بیشتری برای تجسم با استفاده از روش کارتوگرافی وجود داشت. پس از توسعه مفهوم اولیه، نویسندگان تصمیم گرفتند یک نمونه اولیه برای آزمایش کامل مفهوم ایجاد کنند. نمونه اولیه در محیط GIS پیاده سازی شد.
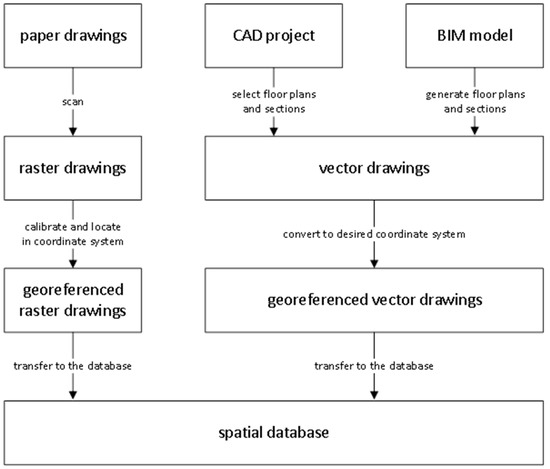
این تحقیق از داده های متنوع برای چندین ساختمان استفاده کرد. برای ساختمان اصلی دانشگاه صنعتی ورشو (یک سازه در اوایل قرن بیستم) از نقشه ها و مقاطع ساختمانی آنالوگ استفاده شد. آنها اسکن شدند، پارامترها و کالیبره شدند تا کارتومتری شوند. شکل ۴ نموداری از پردازش داده ها برای آزمایش ها را نشان می دهد.
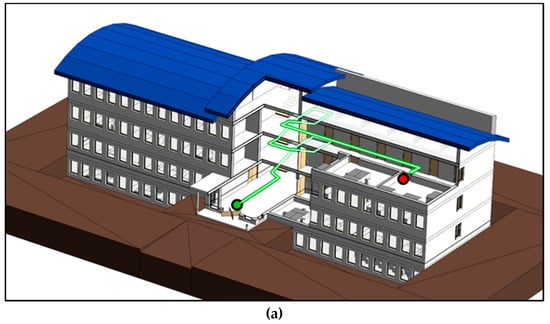
دومین ساختمان آزمایشی مرکز مدیریت نوآوری و انتقال فناوری دانشگاه صنعتی ورشو بود. در این مورد از مستندات فنی برداری از نرم افزار CAD استفاده شده است. پلانهای طبقه و بخشهای یک ساختمان اداری که مستقیماً از مدلهای BIM و CAD ایجاد شدهاند، بهعنوان مجموعه آزمایشی سوم مورد استفاده قرار گرفتند (بهصورت آنلاین توسط مؤسسه اتوماسیون و انفورماتیک کاربردی (IAI) مؤسسه فناوری کارلسروهه (KIT) در دسترس قرار گرفت).
نرم افزار نمونه اولیه در پایتون توسعه یافته است. دادههای آزمایشی، در قالب پلانها و بخشهای طبقه، با استفاده از برنامه Autodesk Revit توسعه یافته و با استفاده از پسوند PostGIS در پایگاه داده PostgreSQL ذخیره میشوند. به لطف مدل پایگاه داده پیشنهادی، امکان ذخیره داده ها بر روی پلان طبقات و مقاطع عمودی وجود داشت. علاوه بر این، پایگاه داده با مجموعهای از «روشهای ذخیرهشده» گسترش یافت تا بسته به مکان و جهت دستگاه، جستجو و بازیابی پلانهای طبقه و مقاطع مربوطه را امکانپذیر کند. بر اساس این نوع اطلاعات به دست آمده با استفاده از شبیه ساز دستگاه تلفن همراه، برنامه نمونه اولیه نمایش پلان طبقه مناسب یا نزدیکترین مقطع را امکان پذیر می کند. هیچ سیستم موقعیت یابی در تست ها استفاده نشد – موقعیت به صورت دستی نشان داده می شود. منبع ورود موقعیت بر نحوه تجسم ساختمان تأثیری ندارد. در راه حل های کاربردی هدف، موقعیت کاربر را می توان از Wi-Fi، بیکن ها، RFID، UWB یا سایر حسگرها به دست آورد.
۴٫ نتایج
تلاشها منجر به روش جدید تجسم و نمونه اولیه سیستمی شد که امکان آزمایش روشهای پیشنهادی ارائه فضای داخلی ساختمانها از منابع داده ناهمگن را فراهم میآورد. این روش برای اولین بار پیشنهاد شد. می توان از آن به طرق مختلف استفاده کرد: در ناوبری، سیستم های مدیریت ساختمان، برنامه های کاربردی برای ایجاد پانوراما از فضای داخلی ساختمان، و حتی در بازی های رایانه ای. راه حل پیشنهادی یک راه حل اضافی است که می تواند در کنار روش تجسم کامل سه بعدی استفاده شود. مزیت راه حل پیشنهادی به ویژه در غیاب دسترسی کامل به داده های ساختمان سه بعدی یا در مورد محدودیت های نرم افزاری (نقص در محیط پردازش سه بعدی) قابل مشاهده است.
در نتیجه آزمایشهای انجامشده، میتوان دستورالعملها و نتیجهگیریهایی را برای تحقیقات بیشتر و توسعه راهحل هدف ترسیم کرد. در زیر نتایج آزمایشات آمده است.
۴٫۱٫ مفهوم تجسم ۲ بعدی +
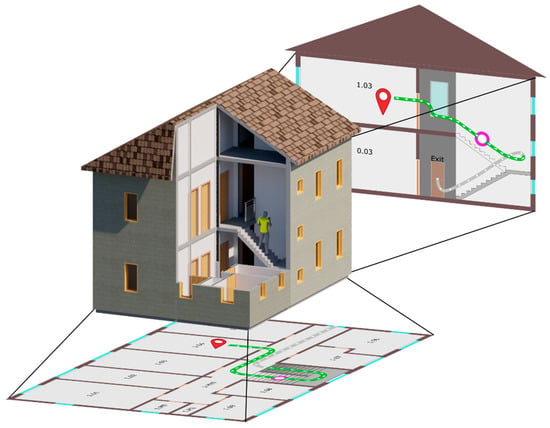
روش ساده پیشنهادی تجسم کارتوگرافی “۲D+” شامل امکان دادن به برنامه های اطلاعات جغرافیایی برای نمایش نه تنها پلان های طبقه (نقشه طبقه) بلکه همچنین مقاطع عرضی عمودی بدون استفاده از روش های سه بعدی یا فناوری است. در نتیجه، کاربر میتواند در سیستمهایی که فقط از دادههای دو بعدی پشتیبانی میکنند، دسترسی سادهتری به دادههای سهبعدی داشته باشد. مزایای این راه حل به ویژه در یک برنامه ناوبری زمانی که کاربر می خواهد مسیر خود را در کل ساختمان مشاهده و تجزیه و تحلیل کند مشهود است. این نوع مسیر اغلب از طبقات زیادی عبور می کند. بنابراین، ارائه ۲ بعدی آن در پس زمینه تنها یک طبقه به طور قابل توجهی کاربر را محدود می کند. شکل ۵ نموداری را نشان می دهد که این ایده را نشان می دهد.
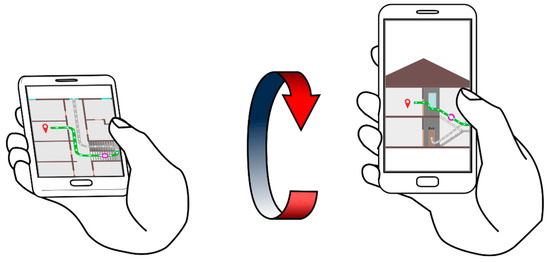
با انتخاب این عملکرد در برنامه یا به صورت خودکار، افقی یا عمودی (اطلاعات از سنسورها) تغییر موقعیت دستگاه تلفن همراه. موقعیت افقی دستگاه منجر به نمایش پلان افقی می شود. قرار گرفتن عمودی دستگاه منجر به نمایش بخش عمودی مناسب ساختمان می شود که این نیز یک راه حل جدید و عملا بی سابقه است. شکل ۶ این موضوع را به صورت شماتیک نشان می دهد.
توسعه یک الگوریتم برای انتخاب خودکار بخش مناسب از ساختمان یک کار مهم است. شکل ۷ این ایده را نشان می دهد. انتخاب بخش صحیح پس از تجزیه و تحلیل موقعیت کاربر و جهت نگاه کاربر رخ می دهد. این بر اساس داده های قطب نما و ژیروسکوپی که دستگاه تلفن همراه مجهز شده است، ایجاد می شود. الگوریتم برای انتخاب بخش ها ممکن است از الگوریتم های معمولی برای تحلیل های فضایی استفاده کند که معمولاً به فناوری GIS نسبت داده می شود.
یکی دیگر از عناصر ضروری راه حل پیشنهادی، نحوه تجسم مسیر کاربر است. این الگوریتم بر اساس چندین نمایش پایگاه داده مرتبط با مسیرهای تولید شده به طور جداگانه برای پلان طبقه و مقطع عمودی استفاده می شود.
۴٫۲٫ یک سیستم مرجع یکنواخت برای پلان طبقات و مقاطع عرضی
در مجموعه دادههای CAD یا BIM، مختصات در سیستمهای مرجع متعامد ذخیره میشوند که سیستمهای محلی هستند که به طور جداگانه برای هر ساختمان ایجاد میشوند. برخلاف اکثر محصولات کارتوگرافی، یک شی معمولاً در سیستم مختصات ژئودتیک جهانی قرار ندارد. این مقاله مشکل تبدیل مختصات از یک سیستم مختصات محلی به یک سیستم مختصات ژئودتیکی را مورد بحث قرار نمی دهد. روش معمول برای تعریف سیستم های مرجع برای نقشه های معماری و ساختمانی، حصول اطمینان از موازی بودن محورهای دیوارهای اصلی ساختمان در پلان های طبقه با محورهای x و y سیستم مختصات است. مقاطع به طور مستقیم به سیستم مختصات محلی ساختمان متصل نیستند. آنها سیستم مختصات محلی خود را دارند. ارتباط با پلان طبقه توسط کاربری که به دنبال عناصر ساختاری مشترک بر اساس دانش و تجربه مرتبط است، اجرا می شود. این وضعیت برای مدلهای BIM متفاوت است، جایی که یک پایه یک مدل سازگار و استاندارد از دادهها است و مقاطع عرضی میتوانند بر حسب تقاضا از مدل بر اساس معیارهای تعریفشده توسط کاربر تولید شوند. مطالعه حاضر فرض میکند که در بیشتر موارد، دادههای منبع برای کاربرد، نقشههای معماری و ساختمانی خواهد بود. بنابراین، لازم است روشی برای اتصال داده ها از پلان طبقات و داده ها از مقاطع ایجاد شود. مطالعه حاضر فرض میکند که در بیشتر موارد، دادههای منبع برای کاربرد، نقشههای معماری و ساختمانی خواهد بود. بنابراین، لازم است روشی برای اتصال داده ها از پلان طبقات و داده ها از مقاطع ایجاد شود. مطالعه حاضر فرض میکند که در بیشتر موارد، دادههای منبع برای کاربرد، نقشههای معماری و ساختمانی خواهد بود. بنابراین، لازم است روشی برای اتصال داده ها از پلان طبقات و داده ها از مقاطع ایجاد شود.
هنگام کار برای راهحل بهینه برای این مشکل، نویسندگان موارد زیر را در نظر گرفتند: فناوری و مدل برای ضبط دادهها، فناوری تحویل دادهها به برنامه ناوبری و روش ارائه آن. نویسندگان تصمیم گرفتند تا مقاطع عرضی عمودی ساختمان را که در هر دو شکل برداری و شطرنجی ذخیره شده است، تجزیه و تحلیل کنند. بنابراین، نمونه اولیه برنامه توسعه یافته توسط نویسندگان، با دانلود مستقیم از پایگاه داده، امکان دستکاری پلان ها و بخش ها را در فرم های شطرنجی و برداری را فراهم می کند.
موضوع دیگری که مورد بررسی قرار گرفت، روش ثبت مختصات مقاطع ساختمان بود. یکی از انواع اصلی مورد تجزیه و تحلیل، تعبیه هر طرح ریزی و مقطع ساختمان در سیستم های مرجع محلی جداگانه و توسعه ماتریس های تبدیل برای یک سیستم مرجع مشترک برای کل ساختمان بود ( شکل ۸ ). داده ها به صورت شطرنجی دوبعدی یا برداری در پایگاه داده GIS ذخیره می شوند. در زیر شرح رویه این پرونده آمده است. نمادهای استفاده شده در توضیحات در جدول ۱ خلاصه شده است.
نمایش موقعیت کاربر (در برنامه ناوبری) مستلزم تبدیل P B در سیستم مختصات سه بعدی ساختمان به Pf1 در سیستم مختصات محلی پلان طبقه [f1] است که می تواند در حساب ماتریس به صورت زیر نوشته شود: f1 = M f1 * P B . پس از جستجوی بخش صحیح (فصل ۳٫۴ پیشنهادهای دقیق برای انتخاب بخش ها ارائه می دهد)، یک تبدیل مختصات با یک ماتریس تبدیل وجود دارد که امکان تبدیل مختصات را از سیستم مختصات محلی پلان طبقه یا مقطع به سیستم مختصات محلی ساختمان با در نظر گرفتن طبقه بندی در شکل ۸، اگر بخش [s2] انتخاب شد، آنگاه: P s2 = M s2 * P B .
در دومین نوع تجزیه و تحلیل شده، تمام داده های مربوط به ساختمان، هم پلان طبقه و هم بخش ها در یک سیستم XYZ مشترک تعبیه شده اند ( شکل ۹ ).
این رویکرد، مانند روش قبلی، فرض میکند که دادهها به شکل شطرنجی یا برداری به عنوان نقشههای دو بعدی در پایگاه داده ذخیره میشوند. در این مورد، M f1 (ماتریسی که روش تبدیل مختصات از سیستم مختصات مدل ساختمان [B] به سیستم مختصات پلان طبقه [f1]) و Ms1 (ماتریسی تعیین کننده روش تبدیل را تعیین می کند. مختصات از سیستم مختصات مدل ساختمان [B] تا سیستم مختصات مقطع ساختمان [s1]) ماتریس ها ماتریس های هویتی هستند.
۴٫۳٫ روش شناسی تجسم کارتوگرافی
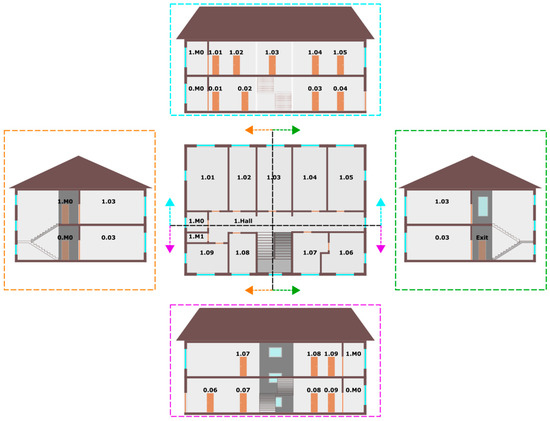
راه حل پیشنهادی همچنین نیازمند توسعه یک روش تجسم است. به دلیل کاربردهای پیشبینیشده، نویسندگان استفاده از روششناسی نقشهکشی را هم برای روشهای ارائه نقشههای فنی (پلانهای کف و مقاطع عمودی) و هم برای ارائه دستورالعملهای ناوبری پیشنهاد میکنند. از جمله، Gotlib و Wyszomirski در مقاله [ ۳۰ ] مسائل مربوط به ارائه نقشهکشی اسناد فنی ساختمانها، از جمله پلانها و مقاطع طبقات را مورد بحث قرار میدهند. با این حال، وانگ و همکاران، در مقاله خود [ ۲۶ ] استدلال می کنند که ادبیات در مورد اصول تجسم نقشه برداری برای دستورالعمل های ناوبری در یک ساختمان بسیار محدود است. نسخه های بعدی شکل ۸بر برخی راه حل های ممکن برای این نوع تجسم تأکید کنید.
می توان برخی از عناصر مفهوم پیشنهادی تجسم کارتوگرافی را از شکل ۵ ، شکل ۷ و شکل ۸ استنباط کرد . شکل ۱۰ روش تجسم یک مسیر در یک ساختمان را نشان می دهد: بخشی که در ارتباط با ناظر بیشتر یا نزدیکتر می شود توسط یک “ارتفاع مسیر از سطح طبقه” مصنوعی ترسیم می شود. علامت گذاری روی خط با نوک پیکان های رو به پایین مسیر نزدیک شدن به ناظر را نشان می دهد. به سمت بالا برای بزرگنمایی. مقاطع عمودی اعداد اتاق را نشان می دهد. پیشنهاد میشود با تغییر اندازه برچسب (شماره اتاق) یا با اشباع کردن رنگ اشیاء، فاصله بین اتاقها و یک بخش معین ایجاد شود [ ۳۱ ].]. با افزایش فاصله اتاق از بخش، اندازه برچسب و اشباع دیوارهای اتاق کاهش می یابد. نویسندگان از استفاده از متغیر گرافیکی “اشباع” خودداری کردند، با توجه به اینکه این روش ارائه اطلاعات ممکن است برای یک کاربر برنامه تلفن همراه غیرقابل خواندن باشد (صفحه نمایش کوچک، حرکت، و غیره). این رویکرد مطابق با اصول کلی ارائه کارتوگرافی موبایل ارائه شده در [ ۳۲ ] است. استفاده صحیح از متغیرهای گرافیکی در شکل ۱۰ b–d نشان داده شده است، در حالی که مشکلات خواندن ممکن است در مورد نشان داده شده در شکل ۱۰ a رخ دهد.
۴٫۴٫ انتخاب مقاطع عمودی
در ساده ترین رویکرد، برنامه ناوبری تنها می تواند از مقاطع اصلی ساختمان استفاده کند که با نمای آنها مطابقت دارد. مستندات معماری و ساختمانی که به خوبی آماده شدهاند، بسته به ماهیت و پیچیدگی ساختمان، بخشهای بیشتری را شامل میشوند یا میتوانند تولید کنند. از این مقاطع می توان در کاربردهای پیشرفته تری استفاده کرد. در پیچیده ترین حالت، ممکن است استفاده از مقاطع منطبق با صفحات بیشتر دیوارهای اصلی ساختمان فرض شود. فرآیند انتخاب مقطع را می توان با تجزیه و تحلیل دید بر اساس نمودار دید کمک کرد. گراسو و همکاران، این موضوع جامع را در [ ۳۳]. جهت مهم دیگر مورد توجه، استفاده از تولید خودکار مقطعی است. در این راه حل، می توان از رویکردی مشابه با روش های تولید نقشه شماتیک خودکار استفاده کرد [ ۳۴ ]. یک مسئله جداگانه برای تعیین اینکه کدام یک از مقطع های موجود در یک لحظه معین از فرآیند ناوبری برای کاربر مفیدتر است وجود دارد: این که نزدیک ترین آن باشد یا مثلاً مقطعی که نمای ساختمان را نشان می دهد. شکل ۱۱ وضعیت انتخاب نزدیکترین بخش را بر اساس موقعیت کاربر و جهت نگاه او نشان می دهد.
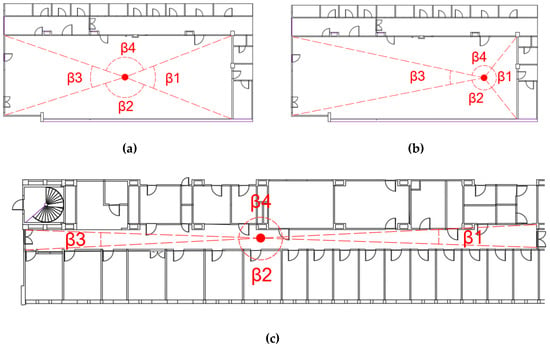
هنگام اتخاذ یک رویکرد تا حدودی پیچیده تر، انتخاب مقاطع عمودی صحیح نه تنها به موقعیت کاربر و جهت نگاه او بستگی دارد، بلکه به شکل خود اتاق نیز بستگی دارد. می توان ساده ترین حالت را زمانی در نظر گرفت که کاربر در نزدیکی مرکز یک اتاق باشد که در آن نسبت طول دیوارها نزدیک به ۱:۱ است و مطمئناً از ۱:۲ تجاوز نمی کند ( شکل ۱۲).آ). در این حالت، زوایای بین جهات موقعیت کاربر به هر دو گوشه یک دیوار که با علامت β۱ … β۴ مشخص شده اند تفاوت قابل توجهی ندارند. هنگامی که کاربر عمود بر دیوار “نگاه می کند” یا جهت نگاه او از جهت عمود بر زاویه ای بیش از +/-۴۵ درجه کج می شود، بهتر است قسمتی که در مقابل کاربر قرار دارد نشان داده شود. مقدار زاویه بحرانی باید برای اتاق هایی با گوشه های بیشتر کوچکتر باشد که می تواند با فرمول بیان شود:
جایی که:
اگر کاربر به یکی از دیوارها نزدیک شود، روش انتخاب مقاطع عرضی که در بالا توضیح داده شد ممکن است نتایج رضایت بخشی به همراه نداشته باشد. اکنون زاویه β۱ بسیار بیشتر از مثال قبلی است، در حالی که زاویه β۳ بسیار کوچکتر است ( شکل ۱۲ ب). استفاده از همین الگوریتم ممکن است منجر به موقعیتی شود که کاربر همچنان رو به دیوار غربی باشد و سیستم در حال نمایش مقطعی است که دیوار شمالی را نشان می دهد. در مثال راهرویی با شکل قابل توجهی درازتر نیز مشهود است ( شکل ۱۲ ج). با این حال، هنگام استفاده از الگوریتم جایگزین که طول دیوارهای خاص را در نظر می گیرد و مقادیر حداکثر زوایای انحراف را بر این اساس انتخاب می کند، برخی از دیوارها، به عنوان مثال، دیوارهای کوتاهتر در راهرو در شکل ۱۲ج، ممکن است هرگز نشان داده نشود. با در نظر گرفتن این موضوع و پس از انجام آزمایشها، نویسندگان تصمیم گرفتند به یک روش برای تعیین حداکثر مقادیر زوایای انحراف از جهت عمود برای همه موارد پایبند باشند.
۴٫۵٫ توسعه یک نمونه اولیه
توسعه نمونه اولیه مستلزم پیشنهاد ساختاری برای پایگاه داده، روشهایی برای به دست آوردن دادهها در مورد فضای داخلی ساختمانها، و الگوریتمی برای عملکرد برنامه ناوبری، از جمله الگوریتمی برای انتخاب مقاطع عرضی عمودی برای نمایش بر اساس موقعیت مکانی کاربر بود. و شکل اتاق برای این منظور، نویسندگان استفاده از پایگاه داده فضایی با استفاده از PostgreSQL با پسوند PostGIS را پیشنهاد کردند. پلان های طبقات در سیستم مختصات ژئودتیکی ذخیره می شدند، در حالی که مقاطع عمودی شطرنجی و برداری در سیستم مختصات محلی ذخیره می شدند. شکل ۱۳ الگوریتم کلی تابع تجسم ۲ بعدی را در راه حل نمونه اولیه نشان می دهد.
تنها هدف برنامه نمونه اولیه شبیه سازی فرآیند تجسم ۲ بعدی است. تمام داده های ورودی ساختگی هستند: اطلاعات مربوط به مکان کاربر در سیستم مختصات محلی ساختمان، جهت دستگاه (به عبارت دیگر، جهت حرکت کاربر) و جهت گیری دستگاه (عمودی یا افقی، نگاه کنید به شکل ۶ ). بر اساس داده ها، پلان طبقه سمت راست (جهت افقی دستگاه) یا مقطع عمودی مربوطه (جهت عمودی دستگاه) بارگذاری می شود.
پلان طبقه مربوطه بر اساس مکان فعلی کاربر، همانطور که در سیستم مختصات XYZ تعریف شده است، انتخاب می شود. مختصات Z طبقه ای را که کاربر روی آن قرار گرفته است، تعیین می کند تا نقشه کف مناسب نمایش داده شود. سپس بر اساس جهت حرکت شبیه سازی شده کاربر، نقشه کف چرخانده می شود تا پلان را با جهت تنظیم کند. پس از آن، موقعیت فعلی کاربر در سیستم مختصات محلی محاسبه میشود و یک نقشه برداری با فرمت SVG (گرافیک برداری مقیاسپذیر) تولید میشود که موقعیت کاربر را در پلان طبقه نشان میدهد.
هنگامی که جهت دستگاه به عمودی تغییر می کند، بر اساس مکان فعلی کاربر مشخص شده در سیستم مختصات XYZ و جهت حرکت، بخش صحیح ساختمان از پایگاه داده انتخاب شده و به همراه موقعیت کاربر در بردار ارائه می شود. فرم.
۵٫ بحث
روش تجسم پیشنهادی ممکن است مکمل ارائههای فعلی باشد که معمولاً در برنامههای ناوبری دوبعدی داخلی یا برنامههای کاربردی سه بعدی که مجموعه کاملی از مدلهای سهبعدی ندارند استفاده میشوند. جدول ۲ مقایسه ای از ویژگی های کاربردی راه حل پیشنهادی را در مقایسه با مواردی که در حال حاضر استفاده می شود، ارائه می دهد.
رویکرد پیشنهادی ممکن است ساده سازی قابل توجهی را برای طراحان و توسعه دهندگان نرم افزار فراهم کند. همچنین ممکن است سیستم جمع آوری داده ها را ساده کند (در حالی که عملکرد بالای برنامه را حفظ می کند). آنچه که مشخصه راه حل پیشنهادی است این است که کاربردهایی که از آن استفاده می کنند می توانند مقیاس پذیر باشند، یعنی فقط با استفاده از پلان طبقات، یا استفاده از پلان طبقه و مقاطع عرضی عمودی ارائه شده بر روی نقشه های معماری و ساختمانی معمولی یا استفاده از پلان طبقه و هر تعداد متقاطع عمودی. -بخش ها (بسته به در دسترس بودن آنها). برای به دست آوردن تجسم های پیچیده یا مفید، نیازی به ایجاد تغییرات در برنامه نیست. کافی است به نسخه های جدید و گسترده تر پایگاه داده دسترسی داشته باشید. این مزیت راه حل پیشنهادی است.
برخی از سادهسازیها در مرحله کنونی تحقیق اتخاذ شدهاند – به عنوان مثال، تنها با استفاده از مقاطع عرضی عمود بر دیوارهای ساختمان. برای ساختمان هایی که دیوارها در ۹۰ درجه همدیگر را قطع نمی کنند، استفاده از مقاطع مایل ممکن است یا حتی ضروری باشد. علاوه بر این، نویسندگان هنگام در نظر گرفتن ترجیحات کاربر، به عنوان مثال، نزدیکتر یا دورتر از موقعیت فعلی کاربر، به مشکل انتخاب مقاطع عرضی عمودی توجه نکردند. همیشه اینطور نیست که نزدیکترین بخش برای نشان دادن مکان کاربر در ساختمان بهترین باشد. گاهی اوقات نمایش موقعیت کاربر و مسیر برنامه ریزی شده در پس زمینه نمای ساختمان (یعنی دورترین قسمت از کاربر) زمینه فضایی بهتری را فراهم می کند. تحقیقات بیشتری در این زمینه انجام خواهد شد.
موضوع مهم دیگری که فراتر از محدوده این مقاله است، روش تولید خودکار مقطع زمانی است که یک مدل سه بعدی کامل از یک ساختمان، به عنوان مثال، یک مدل BIM یا یک مدل GIS در دسترس است. در چنین حالتی، فرآیند انتخاب مقطع ممکن است بسیار سازگارتر از هنگام استفاده از نقشههای معماری و ساختمانی کلاسیک باشد. نویسندگان فرض میکنند که در این مورد، اجرای کار سادهتر خواهد بود، اگرچه موضوعات تحقیقاتی جدیدی ظاهر میشوند.
یک موضوع جداگانه، اگرچه نه کمتر مهم که در بالا به آن اشاره شد، روش دقیق نقشه برداری برای تجسم داخلی است. در حال حاضر هیچ دستورالعملی در این زمینه وجود ندارد.
همچنین شایان ذکر است که تجسم دو بعدی و ۲ بعدی + پیشنهادی نیز ممکن است در برنامه هایی که از مدل های سه بعدی کامل استفاده می کنند مفید باشد. کاربران برنامه های ناوبری به اطلاعات در مقیاس بزرگ و پویا نیاز دارند که با درک آنها از محیط سازگار باشد. توصیه می شود بسته به زمینه، از روش های مختلف تجسم استفاده کنید. گاهی اوقات ممکن است خواندن و درک یک تصویر ساده تر و کلی تر باشد. مدلهای سهبعدی ساختمانها با جزئیات کامل، همیشه از تجسم به گونهای که یک برنامه تلفن همراه باید ارائه کند (از جمله خواندن سریع اطلاعات در یک صفحه کوچک) پشتیبانی نمیکنند. شاید مفهوم پیشنهادی بتواند توسط توسعه دهندگان بازی های رایانه ای نیز مورد استفاده قرار گیرد.
۶٫ نتیجه گیری
با تشکر از تحقیقات انجام شده، می توان مبنایی برای مفهوم جدیدی برای تجسم فضای داخلی ساختمان ها ارائه داد که امکان استفاده مؤثر از نقشه های معماری و ساختمانی را فراهم می کند. در عین حال، استفاده از این روش در هنگام دسترسی به داده های سه بعدی پیشرفته مانند BIM و GIS امکان پذیر است. بر خلاف راه حل های دیگر، نویسندگان استفاده از مقطع عمودی ساختمان ها را پیشنهاد کردند. اینها میتوانند بخشهایی باشند که توسط یک معمار در مرحله طراحی ایجاد شدهاند، اما میتوانند بخشهایی باشند که بهطور خودکار تولید میشوند، مشروط بر اینکه به مدلهای مدرن CAD، BIM یا GIS دسترسی داشته باشید.
نتایج تحقیق ارائه شده مربوط به مرحله اول توسعه روش جدید تجسم داده ها بوده و ادامه خواهد داشت. آزمایش های انجام شده امکان اجرای این مفهوم را تایید کرد. با این حال، انجام تحقیقات بیشتر و اجرای برنامه های کاربردی پیشرفته تر ضروری است. در تحقیقات برنامه ریزی شده بیشتر، نویسندگان قصد دارند روش تجسم نقشه برداری را بهبود بخشند و آزمایش هایی را از چندین نوع تعمیم داده انجام دهند. نویسندگان برای توسعه بیشتر یک راه حل در معماری چند لایه برنامه ریزی می کنند. همچنین انجام مطالعات ادراک روی کاربران و آزمایش میدانی راه حل ها ضروری است. بررسی تمرکز و پرسشنامه برنامه ریزی شده است. برای این منظور، توسعه بیشتر نمونه اولیه توسعه یافته ضروری است.
مفهوم ۲D+ تاکنون توسط هیچ نویسنده ای پیشنهاد نشده است. پیشنهادات ارائه شده امکان ترکیب دنیای BIM، GIS و کارتوگرافی را نشان می دهد. ما معتقدیم که نتایج ارائه شده به توسعه روشها/تکنیکهای ژئوتصویرسازی کمک میکند و ممکن است توسط سایر محققان در فرآیند طراحی نقشه مورد استفاده قرار گیرد.