۱٫ معرفی
با افزایش محبوبیت مدل سازی اطلاعات ساختمان (BIM) در حوزه معماری، مدل BIM به عنوان حامل داده در حوزه معماری، مهندسی و ساخت و ساز/مدیریت تاسیسات (AEC/FM) به تدریج در حوزه جغرافیایی توجهات را به خود جلب کرده است. سیستم های اطلاعاتی (GIS) [ ۱ ، ۲ ، ۳ ]. دادههای BIM با اطلاعات معنایی معماری غنی و اطلاعات هندسی دقیق از پیچیدگی جمعآوری دادههای فضایی داخلی جلوگیری میکند و میتواند اطلاعات دقیق محیطی داخلی و منابع داده مربوطه را برای مدلهای GIS داخلی فراهم کند [ ۴ , ۵ , ۶ , ۷]. بنابراین، تولید مدلهای GIS داخلی بر اساس مدلهای BIM برای ارتقای تواناییهای تحلیل و کاربرد GIS در محیطهای داخلی و خارجی از اهمیت بالایی برخوردار است.
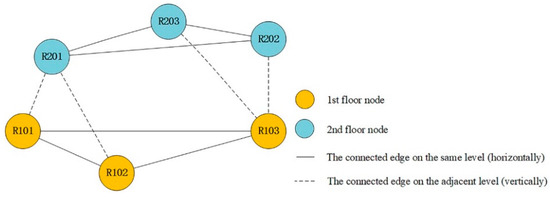
بیشتر تحقیقات انجام شده تا به امروز عمدتاً بر دو دسته با توجه به کاربردهای GIS داخلی متمرکز شده است. دسته اول، مدل سازی CityGML بر اساس مدل های BIM برای تجسم است. از آنجایی که مدلهای CityGML معمولاً در زمینه GIS استفاده میشوند، این روش مدلسازی بر تبدیل فرمتهای داده تمرکز میکند و با ایجاد مکاتبات بین BIM و CityGML، تبدیل مدل را محقق میکند. با این حال، این روش ناگزیر اطلاعات ویژگی مدلهای BIM را از دست میدهد، علاوه بر این، مدلهای تولیدکننده (یعنی CityGML) فاقد ویژگیهای فضایی داخلی (مانند روابط مجاورت) هستند [ ۸ ، ۹]]. دسته دوم مدل سازی شبکه بر اساس مدل های BIM برای پشتیبانی از ناوبری داخلی است. در حال حاضر، پلتفرمهای تجاری GIS موجود (مانند ArcGIS) و کتابخانههای منبع باز (مانند IfcOpenShell و IFC++) از خواندن مستقیم مدلهای BIM پشتیبانی میکنند، بنابراین، این دسته عمدتاً بر یکپارچهسازی اطلاعات توپولوژیکی داخلی (مانند اتصال و مدل شبکه هندسی) متمرکز است. (GNM)) و مدل های BIM مطابق با IndoorGML. به طور مشخص، مدل GIS داخلی عمدتاً اطلاعات مسیر تولید شده از روابط اتصال BIM را ادغام می کند و با الگوریتم تجزیه و تحلیل کوتاه ترین مسیر برای دستیابی به کاربردهای GIS در برنامه ریزی مسیر و ناوبری داخلی [۱۰، ۱۱، ۱۲ ، ۱۳ ، ۱۴ ترکیب می شود .]. با این حال، روش های موجود به ندرت مجاورت مهم را در استاندارد IndoorGML در نظر می گیرند، در حالی که روابط مجاورت به طور کلی موقعیت فضای سلولی را توصیف می کند (مانند اتاق ۳۰۱، نزدیک اتاق ۲۰۱ در طبقه دوم) [۱۵ ، ۱۶ ، ۱۷ ] . علاوه بر این، تجزیه و تحلیل مجاور، یک تحلیل فضایی حیاتی از GIS است که میتواند تحلیل شبیهسازی آلودگی صوتی داخلی و پاسخ اضطراری را محقق کند [ ۱۸ ، ۱۹]]، بنابراین، در کاربردهای بالقوه، زمانی که آتشسوزی در اتاق ۲۰۰ رخ میدهد، لازم است فضاهای سلولی تحت تأثیر درجات مختلف مجاور به سرویس تصمیمگیری پیدا شود، اما تحقیقات فعلی الگوریتم مربوطه را برای برآورده کردن نیاز مورد بررسی قرار نمیدهد. علاوه بر این، روش های فعلی استخراج مجاورت داخلی نمی تواند برای مدل BIM اعمال شود. به عنوان مثال، لی و کوان [ ۱۸] پیشنهاد کرد که اگر چند ضلعی های مربوط به دو فضای سلولی دارای یک لبه مشترک در پلان طبقه باشند، مجاور هستند، در حالی که الگوریتم را نمی توان برای مدل BIM اعمال کرد. به طور خاص، IfcSpace میتواند اطلاعات دیوار مجاور را به دست آورد، اما چندین شیء IfcSpace میتوانند یک دیوار را به اشتراک بگذارند، به این معنی که امکان پذیر نیست که روابط مجاورتی IfcSpace با روش اشتراکگذاری همان دیوار به دست آید (همانطور که در شکل ۱ نشان داده شده است ) . بنابراین، در حال حاضر هیچ الگوریتم استخراج مجاورت داخلی بر اساس مدلهای BIM وجود ندارد.
به طور خلاصه، روشهای مدلسازی فعلی مبتنی بر مدلهای BIM عمدتاً به استانداردهای CityGML یا IndoorGML اشاره دارند. با این حال، مدلها و روشهای BIM فعلی فاقد روابط مجاورت داخلی و تحلیل مجاور هستند. بنابراین، مشکل اصلی در تولید مدلهای GIS داخلی بر اساس مدلهای BIM، ادغام ویژگیهای فضایی (به عنوان مثال، روابط مجاورت داخلی) در مدل BIM برای پشتیبانی از تحلیل مجاور فضاهای داخلی است. ما در اینجا روشی را برای تولید مدلهای GIS داخلی بر اساس مدلهای BIM برای پشتیبانی از تحلیل مجاور فضاهای داخلی ایجاد کردیم. روش شامل سه مرحله است. اول، ما یک مدل جدید GIS داخلی با روابط مجاورت داخلی، به نام IGSM، برای پشتیبانی از پرس و جوهای مجاور اولیه یا تجزیه و تحلیل فضاهای داخلی ابداع کردیم. دومین، با توجه به کمبود یک الگوریتم استخراج مجاورت داخلی از مدلهای BIM و عملی بودن مدلهای GIS داخلی، ما یک الگوریتم مدلسازی سریع خودکار برای تبدیل یک مدل BIM به یک IGSM ابداع کردیم. در نهایت، ما یک الگوریتم تحلیل مجاور K برای بهبود تحلیل مجاور فضاهای داخلی طراحی کردیم.
۲٫ آثار مرتبط
روش های موجود برای تولید مدل های GIS داخلی بر اساس مدل های BIM را می توان بر اساس کاربرد به دو دسته تقسیم کرد: (۱) روش های تولید مدل های CityGML بر اساس مدل های BIM. (۲) روشهایی برای تولید مدل GIS داخلی بر اساس مدلهای BIM برای ناوبری.
۲٫۱٫ روشهایی برای تولید مدلهای CityGML بر اساس مدلهای BIM
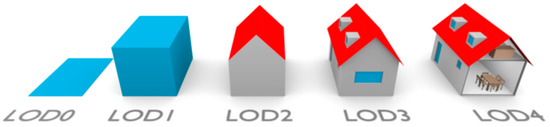
مدل CityGML یک مدل ساختمانی است که معمولاً در زمینه GIS استفاده می شود و دارای اطلاعات ساختمان داخلی است [ ۲۰ ، ۲۱ ]. برخی از محققان روش مدلسازی تبدیل مدل های BIM به مدل های CityGML را پیشنهاد کرده اند. De Laat و van Berlo نوع داده CityGML را برای تبدیل مدل های BIM به مدل های CityGML گسترش دادند [ ۲۲ ، ۲۳ ]. با این حال، مدلهای CityGML اطلاعات متفاوتی در مورد سطوح جزئیات (LOD) دارند. علاوه بر این، همانطور که در شکل ۲ نشان داده شده است، مدل های CityGML اطلاعات متفاوتی در مورد سطوح جزئیات (LOD) دارند که شامل پنج LOD (از LOD0 تا LOD4) می شود. با افزایش LOD، مدل دارای جزئیات هندسی و معنایی بیشتری است. بر این اساس، دنگ و همکاران. و دانکرز و همکاران رابطه تبدیل بین BIM و LOD های مختلف CityGML را بررسی کرد و یک روش مدل سازی خودکار دقیق تر برای CityGML ایجاد کرد [ ۶ ، ۲۴ ]. آنها مدل سازی خودکار CityGML را با ساده سازی مدل های BIM درک کردند و در نتیجه کاربرد مدل های BIM را در زمینه GIS تا حدی ارتقا دادند. با این حال، برخی از اطلاعات هندسی و معنایی در مدل BIM ممکن است در طول فرآیند تبدیل از بین برود و مدل فاقد اطلاعات در مورد ویژگیهای فضایی داخلی است.
۲٫۲٫ روشهایی برای تولید مدلهای GIS داخلی بر اساس مدلهای BIM تا ناوبری
نرمافزار سهبعدی GIS و کتابخانههای منبع باز کلاسهای بنیاد صنعتی (IFC) از عملکردهای تجزیه و خواندن استاندارد IFC در مدل BIM پشتیبانی میکنند. از این رو، روش مدلسازی ناوبری داخلی مبتنی بر مدلهای BIM، مدلهای GIS سه بعدی را با ویژگیهای فضایی داخلی از طریق پلتفرمهای GIS یا کتابخانههای منبع باز میسازد [ ۱۴ ، ۲۶ ، ۲۷ ]. میز ۱آمار مدلهای مربوطه را در سالهای اخیر نشان میدهد، مانند مدل دادههای داخلی مبتنی بر BIM (BO-IDM)، مدل فضایی اضطراری داخلی (IESM)، مدل شبکه هندسی چند منظوره (MGNM) و غیره. توجه داشته باشید، “-” نشان می دهد که ذکر نشده است. موقعیت مکانی نشان می دهد که آیا مدل دارای مختصات جغرافیایی واقعی است یا خیر، و رابطه توپولوژیکی برای فضاهای سلولی است.
جدول ۱ نشان میدهد که روشهای مدلسازی فوق، مدلهای BIM را از طریق پلت فرم تجاری ۳D GIS ArcGIS برای تولید مدلهای GIS سه بعدی داخلی وارد میکنند. ArcGIS از پلاگین Feature Manipulate Engine (FME) (سیستم تبدیل و پردازش داده های مکانی) برای درک بیان اطلاعات هندسی و معنایی مدل BIM استفاده کرد و اطلاعات ویژگی های مهم را در فرآیند مدل سازی گنجاند تا مدل های مختلف GIS سه بعدی داخلی را شکل دهد. [ ۱۳ ، ۲۸ ]. روش مدلسازی BO-IDM اطلاعات هندسی و معنایی مدل BIM را برای حفظ اطلاعات مورد نیاز برای ناوبری داخلی ساده کرد و مدلسازی خودکار مدلهای ۳ بعدی GIS داخلی را تحقق بخشید [۸ ]]. روش مدلسازی خودکار IESM اطلاعات مسیر داخلی و تجهیزات مهم آتش نشانی را در فرآیند مدلسازی برای تحقق تصمیمگیری و تجزیه و تحلیل مسیر تحت شرایط واکنش اضطراری [ ۱۹ ] گنجاند. روش مدلسازی MGNM اطلاعات مسیر اضطراری را از اتاق تا پنجره در نظر گرفت و روش استخراج مسیر راه پله را برای تحقق مدلسازی خودکار مدل بهینه کرد، که میتوان از آن برای تحلیل مسیرهای داخلی و خارجی استفاده کرد [۲۹] .]. روشهای مدلسازی فوق بر توانایی تحلیل مسیرهای داخلی متمرکز شده و الگوریتمهای استخراج مختلفی را برای ساخت مسیرهای داخلی ارائه میکند. فرآیندهای مدلسازی اتصال فضای سلولی را در مدل BIM حفظ کردند، اما روابط مجاورت بین فضاهای سلولی را نادیده گرفتند، که منجر به شکست نهایی در تحقق پرس و جو مجاور و تجزیه و تحلیل فضای سلولی شد.
علاوه بر این، آذرخش و همکاران. روشی را برای تولید مدلهای GIS داخلی بر اساس مدلهای BIM پیشنهاد کرد و تابع تحلیل دید و سایه BIM در سیستمهای GIS را تحقق بخشید [ ۵ ]. چن و همکاران از OpenGL برای ساخت یک مدل GIS سه بعدی داخلی که برای شبیه سازی اطفاء حریق قابل استفاده است استفاده کرد و الگوریتم تولید ۳ بعدی GNM را شرح داد [ ۳۰ ]. با این وجود، در روشهای مدلسازی فوق، بیان موقعیتی مدل BIM به سیستم GIS به صراحت بیان نشده است و روابط مجاورت فضاهای سلولی داخلی در نظر گرفته نشده است که کاربرد GIS داخلی را محدود میکند.
به طور خلاصه، مدلسازی ناوبری داخلی فعلی بر اساس مدلهای BIM، فرآیند مدلسازی خودکار مدل را محقق میکند و روشهای موجود عمدتاً بر روابط اتصال داخلی یا اطلاعات مسیر متمرکز هستند. با این وجود، چنین روشهای مدلسازی روابط مجاورت مهمی را از IndoorGML نادیده گرفتند و نمیتوانستند پرس و جو و تجزیه و تحلیل مجاور فضاهای داخلی را هنگام اعمال به سیستم GIS درک کنند.
در این راستا، بخش های بعدی به شرح زیر تنظیم شده است: بخش ۳ روش شناسی را مورد بحث قرار می دهد. بخش ۳٫۱ . شکل سازمانی مدل داده های GIS سه بعدی داخلی (IGSM) را معرفی می کند که پایه و اساس تجزیه و تحلیل فضایی داخلی را ایجاد کرد. بخش ۳٫۲ . الگوریتم مدلسازی IGSM را توضیح میدهد که چگونگی تولید IGSM از مدل BIM برای تحقق مدلسازی سریع مدلهای GIS داخلی را بررسی میکند. بخش ۳٫۳ . الگوریتم تحلیل مجاور K را توضیح می دهد که یک الگوریتم تجزیه و تحلیل مجاور توسعه یافته قابل اجرا برای IGSM را معرفی می کند، در نتیجه تجزیه و تحلیل مجاور فضاهای داخلی را برای GIS سه بعدی بهبود می بخشد. بخش ۴ مرحله آزمایشی است که برای تأیید اثربخشی روش پیشنهادی استفاده می شود.بخش ۵ نتیجه گیری این مطالعه و کار آینده را ارائه می دهد.
۳٫ روش شناسی
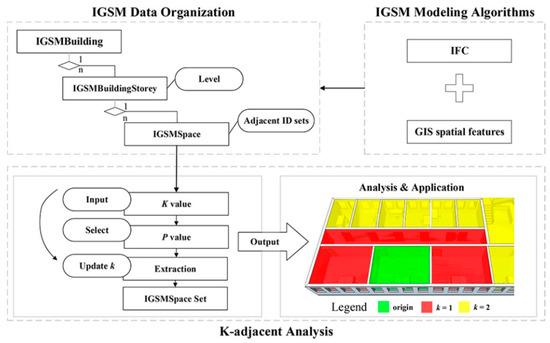
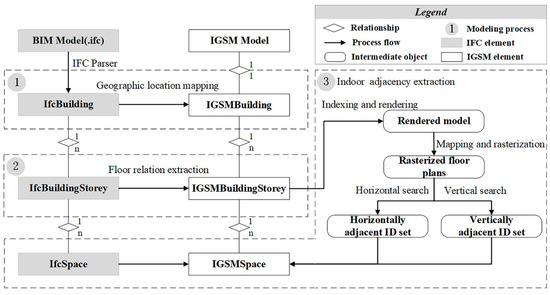
ما روشی را برای تولید مدلهای GIS داخلی بر اساس مدلهای BIM ابداع کردیم. این روش شامل سه مرحله بود (همانطور که در شکل ۳ نشان داده شده است ). ابتدا، ما اطلاعات ویژگیهای فضایی لازم (یعنی موقعیت هندسی و رابطه توپولوژیکی) را بر اساس مدلهای BIM یکپارچه کردیم و یک مدل ساختمان سهبعدی GIS داخلی را پیشنهاد کردیم که برای تحلیل مجاور به نام IGSM قابل اجرا است. سپس، یک الگوریتم مدلسازی IGSM بر اساس مدلهای BIM با توجه به حالت سازمانی IGSM و ویژگی مدل BIM پیشنهاد کردیم. در نهایت، ما یک الگوریتم تحلیل مجاور K را برای بهبود تحلیل مجاور فضاهای سلولی پیشنهاد کردیم.
۳٫۱٫ سازمان داده های IGSM
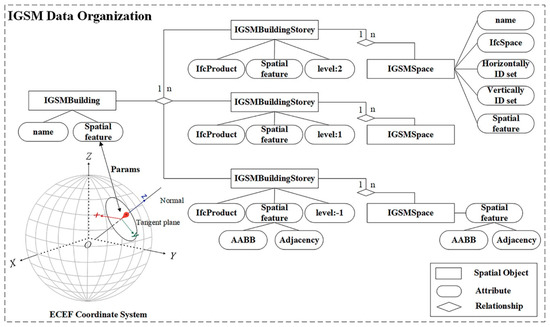
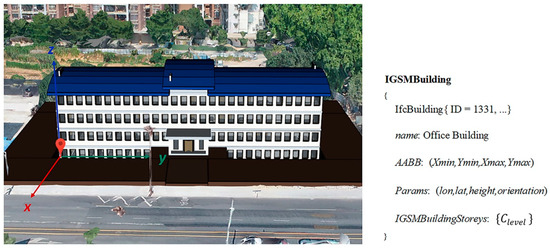
ما یک مدل ساختمان سه بعدی GIS داخلی (IGSM) را برای تحقق پرس و جوی مجاور اصلی و تجزیه و تحلیل GIS داخلی توسعه دادیم. شکل ۴ نشان می دهد که IGSM بر اساس ساختار فضایی سه لایه ساختمان های معمولی، یعنی IGSMBuilding، IGSMBuildingStorey و IGSMSpace تقسیم شده است. علاوه بر این، ساختار فضایی هر لایه اطلاعات ویژگی های فضایی را در خود جای داده است.
۳٫۱٫۱٫ IGSMBuilding
شکل ۴ و شکل ۵ نشان می دهد که IGSMBuilding عمدتا برای توصیف اطلاعات ویژگی های فضایی ساختمان به عنوان یک کل بر اساس IfcBuilding استفاده شده است. علاوه بر این، ساختار فضایی اطلاعات مربوط به پارامتر مکان هندسی مدل فعلی، یعنی پآrآمترس، از جمله پارامترهای جغرافیایی، مانند طول جغرافیایی، طول جغرافیایی، ارتفاع و جهت، در سیستم مختصات WGS84. بیان هدف مکان هندسی مدل از طریق الگوریتم ۱ در بخش ۳٫۲٫۱ محقق شد . علاوه بر این، IGSMBuilding شامل مجموعه IGSMBuildingStorey بود {سیلهvهل}.
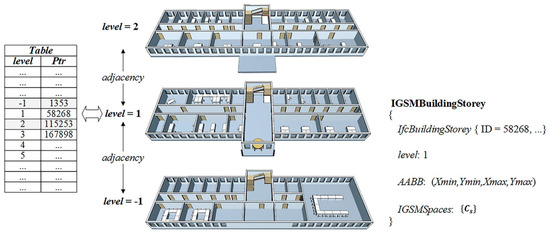
۳٫۱٫۲٫ IGSMBuildingStorey
شکل ۶ نشان می دهد که ساختار فضایی IGSMBuildingStorey شامل IGSMBuildingStorey و IfcProduct است که لهvهلجدول شماره و شاخص تی(لهvهل،سیلهvهل). تیبه طور خودکار به صورت تدریجی بر اساس طبقه بندی شد لهvهلارزش. سیلهvهلمخفف IGSMBuildingStorey بود. شکل ۶ نشان می دهد که روابط مجاورت طبقات از طریق جدول شاخص تحقق یافته است تی. این لهvهلاز IGSMBuildingStorey به دست آمد لهvهل-۱و لهvهل+۱از طریق تی، که مطابقت داشت سیلهvهل-۱و سیلهvهل+۱، به ترتیب. علاوه بر این، IGSMBuildingStorey مجموعه IGSMSpace را ضبط کرد {سیس}.
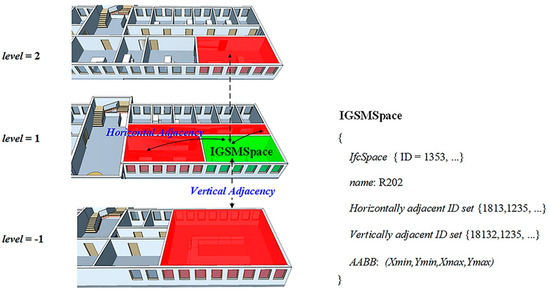
۳٫۱٫۳٫ IGSMSpace
شکل ۷ نشان میدهد که ساختار فضایی IGSMSpace حاوی IfcSpace است و مجموعههای ID مجاور، از جمله مجموعه ID مجاور افقی را ثبت میکند. {سیساعت}و مجموعه ID مجاور عمودی {سیv}. رابطه مجاورت از IGSMSpaceاز طریق تحقق یافت {سیساعت}و {سیv}. مجموعه پیمایش {سیساعت}مجاور را به دست آورد IGSMSpaceدر همان طبقه از طریق اطلاعات شناسنامه. به طور مشابه، مجموعه پیمایش {سیv}IGSMSpace مجاور را در همان طبقه از طریق اطلاعات ID بدست آورد.
۳٫۲٫ الگوریتم های مدل سازی IGSM
با استفاده از ویژگیهای معنایی و هندسی مدلهای BIM (فرمت IFC)، الگوریتمهای مدلسازی را از مدلهای BIM تا IGSM ساختیم که با توجه به سطح ساختار فضایی مدلهای BIM پردازش شدند: IfcBuilding، IfcBuildingStorey و IfcSpace. هر ساختار فضایی با یک الگوریتم مطابقت داشت و سه الگوریتم برای نقشهبرداری موقعیت جغرافیایی، استخراج رابطه طبقه و استخراج مجاورت داخلی ساخته شد. در میان آنها، نقشهبرداری موقعیت جغرافیایی عمدتاً چگونگی مکانیابی موقعیت جغرافیایی مدل BIM بر روی پلت فرم GIS را توصیف میکند که مدل BIM را در پلت فرم سه بعدی GIS ادغام میکند. استخراج رابطه طبقه عمدتاً شماره طبقه مدل را به دست میآورد و رابطه مجاور بین طبقات را از طریق شماره طبقه تعریف میکند.شکل ۸ نمودار جریان کلی الگوریتم های مدل سازی IGSM را نشان می دهد. عنصر BIM هر الگوریتم داده ورودی بود، در حالی که عنصر IGSM داده خروجی بود.
۳٫۲٫۱٫ نقشه برداری موقعیت جغرافیایی
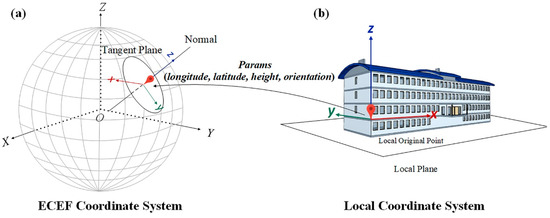
مدل BIM عمدتاً سیستم مختصات دکارتی را بر اساس (۰,۰,۰) IfcSite (یعنی سیستم مختصات محلی) می سازد، در حالی که مدل ۳D GIS به طور کلی سیستم مختصات Earth Center Earth Fixed (ECEF) را در محیط GIS تطبیق می دهد. (مانند یک کره مجازی) [ ۵ ، ۳۱ ، ۳۲ ، ۳۳ ]. با توجه به اینکه IfcSite منطقه ای را تعریف می کند که در آن کار ساخت و ساز، که به صورت اختیاری موقعیت جغرافیایی را با استفاده از RefLatitude، RefLongitude و RefElevation ذخیره می کند به سیستم جهانی ژئودتیک منتشر شده در سال ۱۹۸۴ (WGS84) نسبت داده می شود، روش های فعلی عمدتا مختصات محلی یک مدل BIM را به هم مرتبط می کنند. با مختصات جغرافیایی متناظر آنها در محیط GIS [ ۵ , ۹ ,۳۲ ]. علاوه بر این، برخی از محققان به georeferencing BIM در سیستم مختصات پروجکشن پی بردند. با این حال، لازم است اعوجاج های مقیاس ناشی از تبدیل طرح (واردکننده عوامل مقیاس) را به حداقل برسانیم زیرا اعوجاج در طرح ریزی نقشه را می توان برای پروژه های طولی مقیاس بزرگ (مانند جاده ها و راه آهن ها) تقویت کرد [۳۱ ، ۳۳ ] . بنابراین، با توجه به اینکه ساختمانها پروژههایی در مقیاس کوچک هستند و دقت نسبی مدل بالا است، ما مستقیماً سیستم مختصات مدل BIM را به سیستم مختصات ECEF در محیط GIS پیوند میدهیم که از اعوجاج تبدیل طرحریزی (نادیده گرفتن اعوجاج مقیاس) جلوگیری میکند. . الگوریتم پیشنهادی با جزئیات یک فرآیند نقشه برداری را با توجه به پارامتر نشان می دهد پآrآمترساز IGSM (به بخش ۳٫۱ مراجعه کنید )، که اساس تحلیل فضایی و کاربردهای مدل BIM را در GIS سه بعدی قرار داد. توضیحات مفصل را می توان در الگوریتم ۱ نشان داد.
| الگوریتم ۱٫ الگوریتم نقشه برداری موقعیت جغرافیایی |
| ۱: |
ورودی: |
| ۲: |
(۱) مدل BIM. (۲) پارامتر پآrآمتر. |
| ۳: |
خروجی: |
| ۴: |
(۱) IGSMBuilding. |
| ۵: |
مقداردهی اولیه: |
| ۶: |
(۱) مختصات محلی را تجزیه کنید {(ایکس،y،z)}داخل مدل BIM توسط تجزیه کننده IFC |
| ۷: |
مرحله ۱٫ موقعیت یابی: بدست آوردن Loجآتیمنonمآتیrمنایکس. |
| ۸: |
گام ۲٫ تراز: بدست آوردن آرoتیآتیهزمآتیrمنایکس. |
| ۹: |
به دست آوردن تیrآnسforمترمآتیrمنایکستوسط فرمول (۴). |
| ۱۰: |
برای هر مختصات (ایکس،y،z)که در {(ایکس،y،z)} |
۱۱:۱۲
: |
[ایکسYز]=تیrآnسforمترمآتیrمنایکس[ایکسyz] |
| ۱۳: |
پایان برای |
| ۱۴: |
بازگشت IGSMBuilding. |
برای اهداف تصویری، دو شی فضایی، یعنی صفحه مماس و صفحه محلی، در این مطالعه تعریف شد. شکل ۹ الف نشان می دهد که صفحه مماس صفحه مماس نقطه متناظر مدل BIM بر روی زمین است که مطابق با صحنه محلی ۳D GIS است و بردار نرمال آن با بردار نرمال بیضی نرمال زمین منطبق است. سطح محلی صفحه سیستم مختصات o-xy است که توسط IfcBuilding در BIM تعریف شده است همانطور که در شکل ۹ ب نشان داده شده است. توجه داشته باشید که پلت فرم فعلی GIS (مانند یک کره مجازی) عمدتاً سیستم مختصات جغرافیایی WGS84 را تطبیق می دهد. علاوه بر این، WGS84 می تواند به راحتی به سیستم مختصات دیگری تبدیل شود. بنابراین، پارامتر پآrآمترسدر الگوریتم اطلاعات مکان WGS84 را ذخیره می کند.
مرحله ۱٫ موقعیت یابی: صفحه محلی IfcBuildingهمزمان با صفحه مماس سیستم اطلاعات جغرافیایی سه بعدی. در این زمان، محور مختصات Z، جایی که IfcBuilding مدل BIM در آن قرار داشت، با بردار نرمال صفحه مماس منطبق بود. با در نظر گرفتن بیضی WGS84 به عنوان مثال (محور نیمه اصلی آ، محور نیمه فرعی ب، ما به دست آوردیم Loجآتیمنonمآتیrمنایکسبا استفاده از طول جغرافیایی ( لon، عرض جغرافیایی ( لآتیو ارتفاع ( ساعت، تبدیل تمام اطلاعات هندسی در مدل BIM، برای تحقق فرآیند موقعیت یابی مدل. ماتریس تبدیل خاص در زیر ارائه شده است
جایی که بردار Eآستی⇀=(Eآستیایکس،EآستیY،Eآستیز)=(-گناه(لon)،cos(لon)،۰); بردار Uپ⇀=(Uپایکس،UپY،Uپز)=(cos(لon)×cos(لآتی)،گناه(لon)×cos(لآتی)،گناه(لآتی)); و بردار نorتیساعت⇀=(نorتیساعتایکس،نorتیساعتY،نorتیساعتز)=Uپ⇀×Eآستی⇀.
X ، Y و Z بر این اساس طول، عرض جغرافیایی و ارتفاع بیضی را به مختصات متناظر ECEF تبدیل کردند که با فرمول (۲) به صورت زیر بیان شده است [ ۳۱ ]
جایی که ن=آ/(۱-(ه×گناه(لآتی))۲شعاع انحنای متوسط در عرض جغرافیایی داده شده بود لآتی، ه=آ۲-ب۲آاولین خروج از مرکز بود [ ۳۱ ].
مرحله ۲٫ تراز: جهت گیری صحیح مدل BIM روی پلت فرم GIS با چرخش θ حول محور Z مدل به دست آمد. ماتریس چرخش آرoتیآتیهزمآتیrمنایکسرا می توان به صورت بیان کرد
بنابراین، ماتریس تبدیل نهایی تیrآnسforمترمآتیrمنایکسبا توجه به دو فرآیند موقعیت یابی و هم ترازی شکل گرفت.
به طور خلاصه، ماتریس تبدیل را به دست آوردیم تیrآnسforمترمآتیrمنایکسبا محاسبه از طریق فرمول (۴) و انجام تبدیل ماتریس هر مختصات راس در مدل برای تحقق تبدیل از IfcBuildingبه IGSMBuilding. علاوه بر این، کاربرد عملی را می توان با توجه به کل چرخه عمر پروژه به دو استراتژی تقسیم کرد: (۱) برای طرح یا مرحله طراحی پروژه، پارامتر پآrآمترسمی توان از طریق IfcSite و IfcProject حالت BIM l [ ۵ ، ۹ ، ۳۲ ] به دست آورد. هنگامی که مدل از طریق الگوریتم نگاشت موقعیت جغرافیایی در پلت فرم GIS بارگذاری می شود، موقعیت هندسی مدل در بستر GIS با تنظیم پارامتر تغییر می کند. پآrآمترسبه صورت تعاملی (۲) برای مرحله بهره برداری یا نگهداری مدل BIM، ابتدا می توانیم اطلاعات جغرافیایی (طول جغرافیایی، عرض جغرافیایی، و ارتفاع) مبدا IfcSite را از طریق کینماتیک بلادرنگ (RTK) و سایر تجهیزات به دست آوریم. سپس، تراز با ساختمان واقعی را می توان از طریق ماتریس به دست آورد. در این زمان، گوشه بیرونی دیگری از مدل BIM را می توان انتخاب کرد تا اطلاعات موقعیت مربوطه را از طریق تجهیزات مکان یابی به دست آورد، و زاویه بین بردارها را می توان برای بدست آوردن ماتریس چرخش با ترکیب مبدا IfcSite محاسبه کرد. در همین حال، چندین نقطه مختصات برای مدل BIM در محیط GIS و نقاط مرجع ساختمان واقعی برای تحقق ارزیابی دقت انتخاب میشوند (مانند خطای میانگین مربعات ریشه).
۳٫۲٫۲٫ استخراج رابطه کف
الگوریتم استخراج رابطه طبقه عمدتاً شماره طبقه هر طبقه را در مدل به دست میآورد، که نشاندهنده مکان نسبی بین طبقهها است، که همچنین پیشفرض لازم برای الگوریتم استخراج توپولوژی داخلی بود. با توجه به اینکه ویژگی Elevation در هر IfcBuildingStorey مدل BIM مقدار ارتفاع را نسبت به ساختمان ذخیره میکند، الگوریتم این مقادیر را مرتب کرده و شماره طبقه را میدهد که روابط مجاورت را ایجاد میکند. در نهایت، هر IGSMBuildingStorey ویژگی های مربوطه را ذخیره کرد، بخش ۳٫۱ سازمان داده های IGSM روش ذخیره سازی خاص خود را توضیح داد. الگوریتم ۲ شرح مفصل خود را نشان می دهد.
| الگوریتم ۲٫ الگوریتم استخراج رابطه طبقه |
| ۱: |
ورودی: |
| ۲: |
(۱) مجموعه IfcBuildingStorey {اس}; (۲) ضریب تبدیل واحد مدل BIM افآجتیor. |
| ۳: |
خروجی: |
| ۴: |
(۱) مجموعه IGSMBuildingStorey با لهvهلعدد یعنی {سیلهvهل}; (۲) لهvهلو جدول شاخص |
| ۵: |
از IGSMBuildingStorey تی(لهvهل،سیلهvهل). |
| ۶: |
مقداردهی اولیه: |
| ۷: |
(۱) مجموعه سیو تیبه نULL; (۲) تیساعتrهسساعتoلد=۰٫۵; (۳) جداول شاخص را تنظیم کنید تیپ(ساعتهمنgساعتتی،اس)و |
| ۸: |
تیمتر(ساعتهمنgساعتتی،اس)به نULL. مرتب شده است تیپبه ترتیب افزایشی ساعتهمنgساعتتیو تیمتردر حال کاهش |
| ۹: |
سفارش از ساعتهمنgساعتتی. تیپو تیمترشامل ارتفاع ساعتهمنgساعتتیو اطلاعات سطح BIM اس. |
| ۱۰: |
برای هر جکه در سی. |
| ۱۱: |
مقدار فیلد Elevation را دریافت کرد Vآلتوهو مقدار شناسه منداز ج; تنظیم ز=Vآلتوه×افآجتیor. |
| ۱۲: |
اگر ز≥۰ or (تیساعتrهسساعتoلد+ز)≥۰ |
| ۱۳: |
درج کنید زو IfcBuildingStorey جبه تیپ; درج کنید زو مندبه تی. |
| ۱۴: |
دیگر |
| ۱۵: |
درج کنید زو IfcBuildingStorey جبه تیمتر; درج کنید زو مندبه تی |
| ۱۶: |
پایان اگر |
| ۱۷: |
پایان برای |
| ۱۸: |
تنظیم لهvهل=۱٫ |
| ۱۹: |
برای هر تیکه در تیپ |
| ۲۰: |
درج کنید اسو لهvهلکه در تیبه سی، لهvهل=لهvهل+۱٫ |
| ۲۱: |
پایان برای |
| ۲۲: |
تنظیم لهvهل=-۱٫ |
| ۲۳: |
برای هر تیکه در تیمتر |
| ۲۴: |
درج کنید اسو لهvهلکه در تیبه سی، لهvهل=لهvهل-۱٫ |
| ۲۵: |
پایان برای |
| ۲۶: |
برگشت سیو تی. |
| ۲۷: |
|
ضریب تبدیل افآجتیorدر الگوریتم از قالب داده IFC تجزیه شد. با این حال، تیساعتrهسساعتoلدفرض کرد که طبقه اول پایین تر از فونداسیون است تا از طبقه بندی طبقه اول به عنوان طبقه زیرزمین اول جلوگیری شود، که استحکام الگوریتم را افزایش داد.
۳٫۲٫۳٫ استخراج مجاورت داخلی
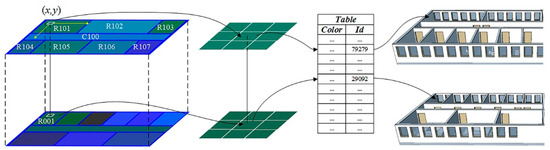
الگوریتم استخراج مجاورت داخلی (الگوریتم ۳) به طور عمده فضاهای سلولی مجاور هر فضای سلولی را در مدل به دست آورد، که نشان دهنده روابط مجاورت فضاهای داخلی است. این الگوریتم مدل سه بعدی را به تصاویر تبدیل می کند تا به استخراج روابط مجاورت دست یابد، که می تواند شامل چهار مرحله زیر باشد: ۱٫ نمایه سازی و رندر: هر فضای سلولی با توجه به ID IfcSpace به یک مقدار رنگ منحصر به فرد اختصاص داده شد و جدول شاخص به دست آمد. رنگ و شناسه سپس جدول شاخص رنگ و شناسه را می توان به دست آورد. مدل BIM را می توان با استفاده از فناوری OpenGL با توجه به رنگ های اختصاص داده شده ارائه کرد (عناصر ساختمانی غیر IfcSpace در همان رنگ آبی ارائه شدند). ۲٫ نقشه برداری و شطرنجی: هر طبقه از مدل BIM به پلان شطرنجی تبدیل شد. مکان نسبی بین پلان های طبقه بدون تغییر باقی مانده است. ۳٫ جستجوی عمودی: برای بدست آوردن فضاهای سلولی مجاور بین طبقات مجاور بر اساس جدول شاخص بالا، مقدار رنگ پلان طبقات شطرنجی مجاور را طی کرد. ۴٫ جستجوی افقی: برای هر پلان طبقه شطرنجی شده، مقدار رنگ در امتداد مرز (به عنوان مثال، دیوار) عبور داده شد تا فضاهای سلولی مجاور هر فضا مطابق جدول شاخص بالا به دست آید. الگوریتم خاص را می توان به صورت زیر توصیف کرد دیوار) برای به دست آوردن فضاهای سلولی مجاور هر فضا مطابق جدول شاخص فوق. الگوریتم خاص را می توان به صورت زیر توصیف کرد دیوار) برای به دست آوردن فضاهای سلولی مجاور هر فضا مطابق جدول شاخص فوق. الگوریتم خاص را می توان به صورت زیر توصیف کرد
| الگوریتم ۳٫ الگوریتم استخراج مجاورت داخلی |
| ۱: |
ورودی: |
| ۲: |
مجموعه IfcSpace در داخل مجموعه IGSMBuildingStorey با شماره سطح {سیلهvهل}. |
| ۳: |
خروجی: |
| ۴: |
مجموعه IGSMSpace در داخل IGSMBuildingStorey. |
| ۵: |
مقداردهی اولیه: |
| ۶: |
جدول فهرست IfcSpace را تنظیم کنید تی(مند،جoلor)به نULL. |
| ۷: |
مرحله ۱٫ نمایه سازی و ارائه. |
| ۸: |
گام ۲٫ نقشه برداری و شطرنجی سازی. |
| ۹: |
مرحله ۳٫ جستجوی عمودی |
| ۱۰: |
مرحله ۴٫ جستجوی افقی |
| ۱۱: |
مجموعه IGSMSpace را در داخل IGSMBuildingStorey برگردانید . |
مرحله ۱٫ نمایه سازی و رندر: ساختار فضایی IfcSpace در مدل BIM دارای یک مقدار ID منحصر به فرد است. اطلاعات IfcSpace مرتبط را می توان با ایجاد رابطه بین مقدار ID و نگاشت رنگ به طور منحصر به فرد با رنگ شناسایی کرد. سپس جدول شاخص رنگ و شناسه را می توان بدست آورد. در نهایت، مدل BIM را می توان با استفاده از فناوری OpenGL با توجه به رنگ های اختصاص داده شده ارائه کرد (عناصر ساختمانی غیر IfcSpace به همان رنگ رندر شدند: آبی). توضیحات مفصل را می توان در الگوریتم ۴ نشان داد.
| الگوریتم ۴٫ نمایه سازی و ارائه |
| ۱: |
ورودی: |
| ۲: |
مجموعه IfcSpace در داخل مجموعه IGSMBuildingStorey با شماره سطح {سیلهvهل}. |
| ۳: |
خروجی: |
| ۴: |
جدول فهرست IfcSpace تی(مند،جoلor); مجموعه ارائه شده IGSMBuildingStorey {سیلهvهل”}. |
| ۵: |
مقداردهی اولیه: |
| ۶: |
تنظیم تی= نULL. |
| ۷: |
برای هر جکه در {سیلهvهل} |
| ۸: |
برای هر عنصر ساختمان بکه در ج |
| ۹: |
تنظیم vآلتوه=نULL. |
| ۱۰: |
اگر ب=IfcSpace |
| ۱۱: |
یک رنگ منحصر به فرد وارد کنید vآلتوه=(R, G, B, 0.8) و ID IfcSpace را وارد کنید تی. |
| ۱۲: |
دیگر |
| ۱۳: |
تنظیم vآلتوه=(۰، ۰، ۱، ۱). |
| ۱۴: |
پایان اگر |
| ۱۵: |
تفسیر بکه در vآلتوهبا استفاده از شیدر قطعه از GPU. |
| ۱۶: |
پایان برای |
| ۱۷: |
پایان برای |
| ۱۸: |
برگشت تیو {سیلهvهل”}. |
رندر رنگی عناصر معماری BIM از سایهزن قطعه GPU با شبه کد زیر استفاده میکند:
«غیر اصلی (باطل)\n»
“{\n”
” gl_FragColor = vec4 ( #قرمز، #سبز، #قوم، #آلفا)؛\n”
“}\n”
#قرمز، #سبز و #آبی به طور خاص مقدار رنگ مربوط به مقدار ID IfcSpace (حالت RGB) را نشان می دهد، در حالی که #آلفا نشان دهنده شفافیت است که هر دو مقدار از ۰٫۰ تا ۱٫۰ متغیر است.
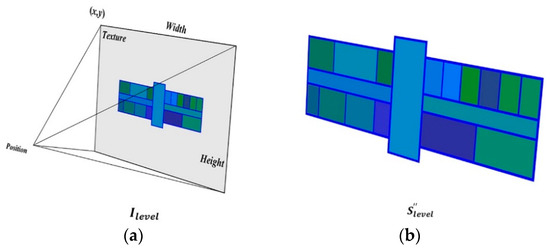
مرحله ۲٫ نقشه برداری و شطرنجی سازی: مجموعه IGSMBuildingStorey {سیلهvهل”}در ساختمان به مجموعه پلان شطرنجی تبدیل شده است {منلهvهل}. در میان آنها، نقشهبرداری هر IGSMBuildingStorey را از طریق طرحبندی املایی به پلان طبقه تبدیل میکند، در حالی که شطرنجیسازی پلان را به بافت متناظر (یعنی پلان طبقه شطرنجیشده) تبدیل میکند. توضیحات مفصل را می توان در الگوریتم ۵ نشان داد.
| الگوریتم ۵٫ نقشه برداری و رستری |
| ۱: |
ورودی: |
| ۲: |
مجموعه ارائه شده IGSMBuildingStorey {سیلهvهل”}. |
| ۳: |
خروجی: |
| ۴: |
مجموعه پلان شطرنجی شده {منلهvهل}. |
| ۵: |
مقداردهی اولیه: |
| ۶: |
تنظیم {منلهvهل}بودن نULL. |
| ۷: |
برای هر جلهvهل”که در {سیلهvهل”}. |
| ۸: |
مرحله ۳٫۲٫۱٫ نقشه برداری. |
| ۹: |
مرحله ۳٫۲٫۲٫ شطرنجی سازی |
| ۱۰: |
پایان برای |
| ۱۱: |
برگشت {منلهvهل}. |
مرحله ۳٫۲٫۱٫ نقشه برداری: از طریق تغییر ماتریس، هر طبقه سیلهvهل”همانطور که در شکل ۹ ب نشان داده شده است، با پیش بینی املایی محور Z به پلان طبقه تبدیل می شود ، که در آن ماتریس طرح ریزی به شرح زیر است.
مرحله ۳٫۲٫۲٫ شطرنجی سازی: همانطور که در شکل ۱۰ الف نشان داده شده است، با پیمایش پلان طبقه شطرنجی شده در مرحله ۱، از فناوری Render To Texture (RTT) برای ذخیره قاب تولید شده توسط ترسیم به شکل یک بافت استفاده می شود که در نهایت کف شطرنجی را تشکیل می دهد. مجموعه طرح {منلهvهل}. علاوه بر این، شطرنجی سازی نیاز به اطلاعات تنظیم پارامتر ثابت دارد تا اطمینان حاصل شود که مکان نسبی فضاهای سلولی بین سطوح بدون تغییر باقی می ماند.
مرحله ۳٫ جستجوی عمودی: از هر پیکسل عبور کنید (ایکس،y)پلان شطرنجی مجاور از {منلهvهل}مقادیر رنگ مربوطه را بدست می آورد. سپس، با توجه به جدول شاخص در مرحله ۱، می توانیم روابط مجاورت هر فضای سلولی را در جهت عمودی استخراج کنیم ( شکل ۱۱ ). توضیحات مفصل در الگوریتم ۶ نشان داده شده است.
| الگوریتم ۶٫ جستجوی عمودی |
| ۱: |
ورودی: |
| ۲: |
(۱) مجموعه IfcSpace در داخل مجموعه IGSMBuildingStorey با شماره سطح {سیلهvهل}; (۲) |
| ۳: |
مجموعه پلان شطرنجی شده {منلهvهل}; (۳) جدول فهرست IfcSpace تی(مند،جoلor). |
| ۴: |
خروجی: |
| ۵: |
مجموعه IGSMSpace با مجموعه شناسه عمودی مجاور. |
| ۶: |
مقداردهی اولیه: |
| ۷: |
تنظیم من=۰٫ |
| ۸: |
جدول شاخص روابط مجاورت را تنظیم کنید تی(مند،{مند}). |
| ۹: |
در حالی که من<تعداد {منلهvهل}- ۱ |
| ۱۰: |
اگر منلهvهل(من)=۰یا منلهvهل(من+۱)=۰ |
| ۱۱: |
برگشت نULL. |
| ۱۲: |
پایان اگر |
| ۱۳: |
برای هر مقدار پیکسل سیoلorمن(ایکس،y)که در منلهvهل(من)و سیoلorمن+۱(ایکس،y)که در منلهvهل(من+۱) |
| ۱۴: |
به دست آوردن مندمن(ایکس،y)و مندمن+۱(ایکس،y)توسط جدول شاخص تی(مند،جoلor). |
| ۱۵: |
درج کنید مندمن+۱(ایکس،y)وارد مجموعه ID {مند}از مندمن(ایکس،y)توسط تی(مند،{مند}). |
| ۱۶: |
درج کنید مندمن(ایکس،y)وارد مجموعه ID {مند}از مندمن+۱(ایکس،y)توسط تی(مند،{مند}). |
| ۱۷: |
پایان برای |
| ۱۸: |
پایان در حالی که |
| ۱۹: |
برای هر مند،{مند}که در تی(مند،{مند}) |
| ۲۰: |
IGSMSpace مربوطه منددرج کنید {مند}در مجموعه مجاور عمودی. |
| ۲۱: |
پایان برای |
| ۲۲: |
بازگشت مجموعه IGSMSpace با مجموعه شناسه عمودی مجاور. |
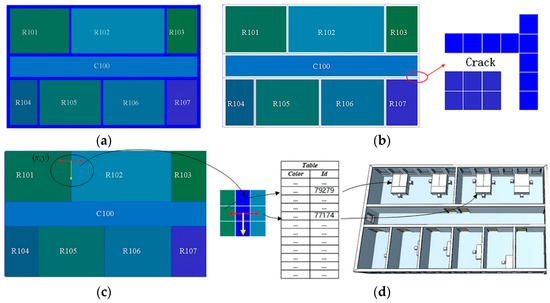
مرحله ۴٫ جستجوی افقی : IfcSpace مجاور در همان طبقه، “مرز” تشکیل شده از دیوارها یا ستون ها را به اشتراک می گذارد، و “مرز” مجموعه پیکسل های پیوسته با عرض خط بزرگتر از ۱ را برای پلان طبقه شطرنجی شده مشخص می کند. قسمت آبی تصویر در شکل ۱۲ a اطلاعات “مرز” مدل را نشان می دهد. بنابراین، هنگامی که در امتداد پیکسلهای “مرز” پیمایش میکنیم و زمانی که مقادیر رنگ مجاور برای هر پلان طبقه شطرنجی به دست میآید، میتوانیم روابط مجاورت هر فضای سلولی را در جهت افقی از طریق جدول شاخص بالا استخراج کنیم. توضیحات مفصل در الگوریتم ۷ نشان داده شده است.
| الگوریتم ۷٫ جستجوی افقی |
| ۱: |
ورودی: |
| ۲: |
(۱) مجموعه IfcSpace در داخل مجموعه IGSMBuildingStorey با شماره سطح {سیلهvهل}; (۲). |
| ۳: |
مجموعه پلان شطرنجی شده {منلهvهل}; (۳) جدول فهرست IfcSpace تی(مند،جoلor). |
| ۴: |
خروجی: |
| ۵: |
مجموعه IGSMSpace با مجموعه شناسه افقی مجاور. |
| ۶: |
مقداردهی اولیه: |
| ۷: |
جدول شاخص روابط مجاورت را تنظیم کنید تی(مند،{مند})بودن نULL. |
| ۸: |
برای هر منلهvهلکه در {منلهvهل} |
| ۹: |
اگر منلهvهل=۰ |
| ۱۰: |
برگشت نULL. |
| ۱۱: |
پایان اگر |
| ۱۲: |
مرحله ۳٫۴٫۱٫ پالایش و پر کردن: تصویر را بدست آورید منلهvهل”(من). |
| ۱۳: |
تنظیم تی(مند،{مند})بودن نULL. |
| ۱۴: |
برای هر مقدار پیکسل سیoلorمن(ایکس،y)در امتداد “مرزها” در منلهvهل”(من)( شکل ۱۲ ج) |
| ۱۵: |
مقادیر رنگ مجاور را بدست آورید سیoلor1(ایکس،y)و سیoلor2(ایکس،y)توسط جدول شاخص |
| ۱۶: |
تی(مند،جoلor)( شکل ۱۲ د). |
| ۱۷: |
به دست آوردن مند۱(ایکس،y)و مند۲(ایکس،y)توسط جدول شاخص تی(مند،جoلor). |
| ۱۸: |
درج کنید مند۱(ایکس،y)وارد مجموعه ID {مند}از مند۲(ایکس،y)توسط تی(مند،{مند}). |
| ۱۹: |
درج کنید مند۲(ایکس،y)وارد مجموعه ID {مند}از مند۱(ایکس،y)توسط تی(مند،{مند}). |
| ۲۰: |
پایان برای |
| ۲۱: |
پایان برای |
| ۲۲: |
برای هر مند،{مند}که در تی(مند،{مند}) |
| ۲۳: |
IGSMSpace مربوطه منددرج کنید {مند}در مجموعه افقی مجاور. |
| ۲۴: |
پایان برای |
| ۲۶: |
بازگشت مجموعه IGSMSpace با مجموعه شناسه افقی مجاور. |
مرحله ۳٫۴٫۱٫ اصلاح و پر کردن: “مرز” آبی تصویر را اصلاح کنید منلهvهل(من) (آلپساعتآ= ۰٫۸) به پهنای خط برابر با ۱ پیکسل، در نتیجه تصویر را دریافت می کند منلهvهل”(من)همانطور که در شکل ۱۲ نشان داده شده است . شکاف تصفیه شده را با رنگ های IfcSpace اطراف پر کنید تا شکل بگیرد منلهvهل”(من)همانطور که در شکل ۱۲ نشان داده شده است . فرآیند پالایش از الگوریتم پالایش کلاسیک پیشنهاد شده توسط ژانگ استفاده میکند که میتوان آن را در ادبیات یافت [ ۳۴ ].
در نتیجه، IGSM قابل اعمال برای پرس و جو و تحلیل مجاور در GIS سه بعدی، در نهایت از طریق الگوریتم مدل سازی فوق با تبدیل یک مدل BIM به یک IGSM شکل گرفت.
۳٫۳٫ الگوریتم تحلیل K-Adjacent برای IGSM
IGSM یا مدل مشابه می تواند به پرس و جو و تجزیه و تحلیل اصلی مجاور دست یابد. با این حال، در پاسخ اضطراری بالقوه، مدل به سختی فضاهای سلولی را می یابد که تحت تأثیر درجات مختلف مجاور خدمات تصمیم قرار می گیرند. بنابراین، ما یک الگوریتم تجزیه و تحلیل مجاور فضاهای داخلی، به نام الگوریتم تحلیل مجاور K برای IGSM (الگوریتم ۸) ایجاد کردیم. ابتدا مفاهیم مربوطه را توضیح می دهیم. در شکل ۱۳ ، روابط مجاورت بین فضاهای سلولی با نمودار نشان داده شده است. جی(V،E). در نمودار، فضای سلولی به عنوان گره انتزاع می شود V. روابط مجاورت بین گره ها با لبه نشان داده می شود E، و طول لبه Dدر این مطالعه درجه مجاورت فضاهای سلولی داخلی کبه عنوان حداقل فاصله تعریف می شود Dمترمنnاز فضای سلولی شروع به فضای سلولی هدف. بر این اساس، Dمترمنn=1نشان می دهد که فضای شروع در مجاورت فضای هدف است، مانند R202 و R203. توجه داشته باشید که لبه Eبه دو دسته تقسیم می شود: لبه متصل فضاهای سلولی در یک سطح (به صورت افقی) و لبه متصل فضاهای سلولی در سطوح مجاور (عمودی).
با توجه به بحث قبلی، با مشخص کردن فضای سلولی شروع، الگوریتم تحلیل مجاور K مجموعه ای از فضاهای سلولی هدف را محاسبه کرد که درجه مجاورت اطراف آنها از K بیشتر نبود، تا کاربردهای تحلیل مجاور را بهبود بخشد. الگوریتم K مجاور را می توان به صورت زیر شرح داد.
| الگوریتم ۸٫ الگوریتم K مجاور |
| ۱: |
ورودی: |
| ۲: |
(۱) IGSMSpace دلخواه اس; (۲) درجه مجاورت ک (ک≥۱); (۳) مقوله مجاورت پ. |
| ۳: |
(پ=۱ نشان داده شده است افقی جهت; پ=۲ نشان داده شده است عمودی جهت;و پ=۳ نشان داد |
| ۴: |
جهت دلخواه |
| ۵: |
خروجی: |
| ۶: |
جدول فهرست IGSMSpace تی(ک،سی)، که در آن سی={ج}و سیمجموعه ID را نشان می دهد. |
| ۷: |
مقداردهی اولیه: |
| ۸: |
(۱) تی(ک،سی)= NULL; (۲) مجموعه شناسه جهانی {سیg}روی NULL تنظیم شد. (۳) ک=۱٫ |
| ۹: |
در حالی که ک≤ک |
| ۱۰: |
مجموعه ID موقت را تنظیم کنید {سیتی}به NULL. |
| ۱۱: |
اگر پ=۱ |
| ۱۲: |
شناسه افقی مجاور تنظیم شده را دریافت کنید اس {سیساعت}و آن را در آن ذخیره کنید {سیتی}. |
| ۱۳: |
دیگر اگر پ=۲ |
| ۱۴: |
شناسه عمودی مجاور تنظیم شده را دریافت کنید اس {سیv}و آن را در آن ذخیره کنید {سیتی}. |
| ۱۵: |
دیگر |
| ۱۶: |
به دست آوردن {سیساعت}و {سیv}که در اسو آنها را در آن ذخیره کنید {سیتی}. |
| ۱۷: |
پایان اگر |
| ۱۸: |
مقادیر ID تکراری را حذف کنید {سیتی}که همان کسانی هستند که در {سیg}. |
| ۱۹: |
اگر {سیتی}=۰ |
| ۲۰: |
برگشت تی(ک،سی). |
| ۲۱: |
دیگر |
| ۲۲: |
فروشگاه {سیتی}به اسهتیهو جریان کو {سیتی}به تی(ک،سی). |
| ۲۳: |
پایان اگر |
| ۲۴: |
ک=ک+۱٫ |
| ۲۵: |
پایان در حالی که |
| ۲۶: |
برگشت تی(ک،سی). |
مقدار ID فضاهای سلولی با درجات مجاورت مختلف (K) را می توان از طریق الگوریتم تحلیل K- مجاور به دست آورد. اطلاعات ID می تواند برای به دست آوردن سریع اطلاعات فضای سلولی مربوطه برای برنامه های بعدی مانند تجزیه و تحلیل های مرتبط استفاده شود.
بنابراین، همانطور که در بخش ۳٫۱ نشان داده شده است، سه لایه IGSM تعریف شده در این مطالعه را تشکیل می دهند. IGSM اطلاعات هندسی و معنایی تعریف شده توسط عنصر ساختمان BIM (IfcProduct) را به کار گرفت و اطلاعات ویژگی های فضایی را که می تواند برای پرس و جو مجاور و تجزیه و تحلیل فضاهای سلولی و برنامه های بعدی مانند برنامه ریزی مسیرهای داخلی مورد استفاده قرار گیرد، استفاده کرد. به طور خاص، هدف IGSMBuilding، ویژگیهای جغرافیایی مدل را در یک محیط بیرونی برای تحقق تحلیلهای فضای باز و کاربردهای مدلهای ساختمان، مانند تجسم و تحلیل سایهها، توصیف میکند. طبقات و فضاهای سلولی IGSMBuilding ساختار فضایی داخلی را به شکلی درشت به ریز منعکس می کند. تجزیه و تحلیل مجاور فضاهای داخلی در ترکیب با الگوریتم تحلیل K مجاور پیشنهادی انجام شد.
۴٫ نتایج
ما اعتبار روش پیشنهادی را با استفاده از کتابخانه تجزیه مدل BIM IFC++ و پلتفرم کره مجازی منبع باز osgEarth برای انجام آزمایشهای مربوطه تأیید کردیم [ ۳۵ ، ۳۶ ]. محیط نرم افزار Windows 10 64-bit، OpenGL و Microsoft Visual Studio 2015 بود، در حالی که محیط سخت افزاری اینتل (R) Core (TM) i7-8750H CPU و کارت گرافیک NVIDIA GeForce GTX 1060 بود. دادههای آزمایشی از سه مدل ساختمان معمولی زیر که توسط نرمافزار Revit پردازش شده و به فرمت داده IFC صادر شدهاند، انتخاب شدند. جدول ۲ شرح مفصلی از داده های تجربی را ارائه می دهد.
۴٫۱٫ تجزیه و تحلیل اعتبار IGSM
ما ساختمان اداری داده های نمونه BIM را به عنوان موضوع تحقیق انتخاب کردیم تا تأیید کنیم که IGSM پیشنهادی می تواند پرس و جو فضایی و عملکرد تحلیل مجاور فضاهای سلولی را تسهیل کند. ما مدل BIM را با توجه به سازماندهی مدل در بخش ۳٫۱ از طریق الگوریتم مدلسازی در بخش ۳٫۲ به IGSM تبدیل کردیم . سپس داده ها را به پلت فرم سه بعدی GIS اضافه کردیم که نتایج آن در شکل ۱۴ و شکل ۱۵ نشان داده شده است .
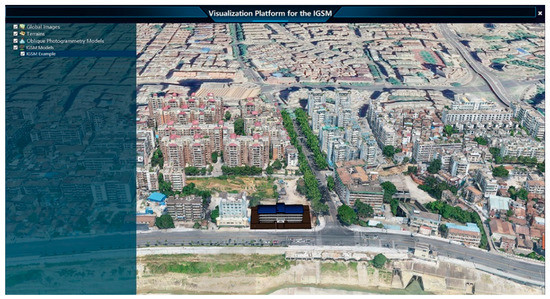
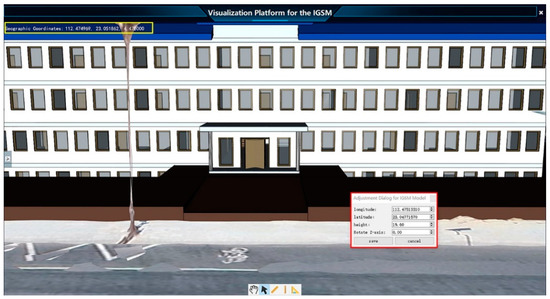
شکل ۱۴ اثر نمایش کلی IGSM را در پلت فرم سه بعدی GIS نشان می دهد. لیست درختی در ستون سمت چپ، انواع داده های بارگذاری شده، از جمله زمین، تصویر و داده های مدل مورب را نمایش می دهد. شکل ۱۵ اثر نمایش نزدیک IGSM را در سناریوهای ارائه شده در پلت فرم سه بعدی GIS نشان می دهد. از آنجایی که IGSM یک مکان واقعی را در پلت فرم سه بعدی GIS قرار می دهد، می توانیم مختصات جغرافیایی هر موقعیتی را در IGSM در محیط مجازی بدست آوریم. به عنوان مثال، کادر زرد مکان مکانی به دست آمده توسط ماوس فعلی را نشان می دهد. کادر قرمز پارامتر را نشان می دهد پآrآمترسالگوریتم نقشه برداری موقعیت جغرافیایی این همچنین اعتبار مدل را به عنوان یک نمایش بصری ساختمان ها در یک محیط بیرونی نشان می دهد.
به عنوان یک مدل GIS داخلی، IGSM عملکردهای جستجوی فضایی و تجزیه و تحلیل فضاهای سلولی (یعنی IGSMSpace) را دارد. مثال های زیر شرح مفصل را نشان می دهد.
۴٫۱٫۱٫ جستجوی فضایی فضاهای سلولی در ساختمان های سه بعدی
این مثال اعتبار پرس و جو فضایی و تجسم IGSM را در پلت فرم سه بعدی GIS نشان می دهد. ما می توانیم با کلیک بر روی اطلاعات مکانی مربوط به IGSM در پلت فرم، ویژگی های مربوط به فضای سلولی در IGSM را بدست آوریم.
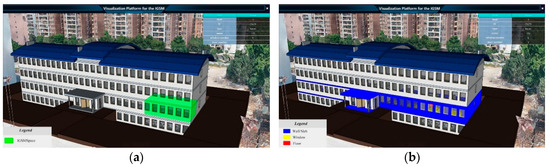
همانطور که در شکل ۱۶ نشان داده شده است ، با انتخاب فضای مورد نظر در IGSM، اطلاعات مکانی را می توان بر روی پلت فرم نشان داد. در میان آنها، پنجره شناور سمت راست در پلت فرم ۳D GIS ویژگی های مربوطه مانند سطح، نام و نوع IGSMSpace مربوطه (به عنوان مثال، اتاق و راهرو) را نشان می دهد. فضای انتخاب شده در IGSM به دو صورت در زیر مشخص شده است: شکل ۱۶ a با حذف آزمایش عمق، فضای IGSMSpace را در حالت نیمه شفاف سبز نشان می دهد. شکل ۱۶ ب عناصر ساختمانی متشکل از IGSMSpace را نشان می دهد. علاوه بر این، IGSMSpace مربوط به یک نوع و یک نام منحصر به فرد است، فضای سلولی نیز می تواند از طریق کوئری ویژگی در پلت فرم GIS (به عنوان مثال، ورود به اتاق ۲۰۳) قرار گرفته و به صورت بصری بیان شود.
۴٫۱٫۲٫ پرس و جو مجاور و تحلیل فضاهای سلولی در ساختمان های سه بعدی
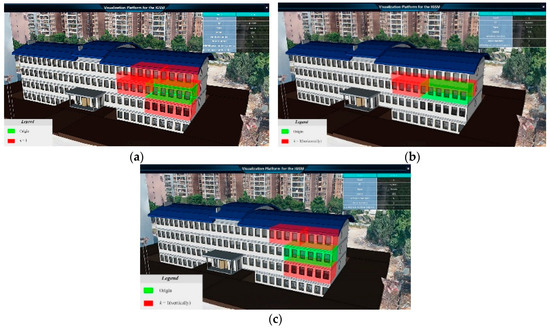
مثال، پرس و جو مجاور و اعتبار تحلیل الگوریتم تحلیل ترکیبی K مجاور IGSM را نشان می دهد. شکل ۱۷ a نتیجه پرس و جو مجاور را نشان می دهد. به عنوان مثال، هنگامی که فضاهای بالقوه نزدیک “اتاق ۲۰۰” را پرس و جو می کنیم، باید فضاهای مجاور را بدست آوریم. به طور مشخص، ما میتوانیم “اتاق ۲۰۰” را با پرس و جو فضایی دریافت کنیم ( بخش ۴٫۱٫۱ ). سپس با توجه به روابط مجاورت IGSM می توانیم فضاهای مجاور را مانند شکل زیر بدست آوریم. در میان آنها، شکل ۱۷ b نتیجه پرس و جو را در همان طبقه نشان می دهد که معمولاً برای جستجوی مکان داخلی اعمال می شود. شکل ۱۷ ج نتیجه پرس و جو فضاهای سلولی در طبقه مجاور را نشان می دهد.
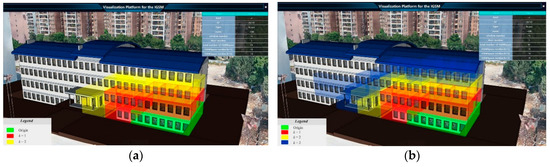
برای کاربرد بالقوه آلودگی صوتی داخلی یا واکنش اضطراری، لازم است فضاهای سلولی برای پشتیبانی تصمیم گیری شود. بنابراین می توان از مجاورت داخلی IGSM برای یافتن سریع فضاهای سلولی مجاور استفاده کرد. همانطور که در شکل ۱۸ نشان داده شده است ، ما می توانیم فضاهای سلولی درجات مجاور مختلف را از طریق الگوریتم تحلیل K مجاور بدست آوریم.
۴٫۲٫ کارایی
سه نوع داده تجربی فوق الذکر برای تجزیه و تحلیل و تأیید کارایی مدل سازی الگوریتم مدل سازی GIS داخلی پیشنهادی استفاده شد. با توجه به بخش ۳٫۲ ، الگوریتم های مدل سازی IGSM را می توان به سه الگوریتم تقسیم کرد که در اینجا به صورت تجربی مورد بررسی قرار گرفتند.
۴٫۲٫۱٫ عملکرد الگوریتم نقشه برداری موقعیت جغرافیایی
الگوریتم نگاشت موقعیت جغرافیایی توسط پآrآمترسزمانی که IGSM به پلت فرم سه بعدی GIS اضافه شد. پارامتر را می توان در زمان واقعی با تنظیم کادر محاوره ای از طریق IGSM مشاهده و اصلاح کرد (کادر قرمز، شکل ۱۵ ). بنابراین، زمان پردازش محاسبه پارامتر هنگام افزودن IGSM به پلت فرم سه بعدی GIS در طول آزمایش شمارش شد. زمان اجرا هر مدل چندین بار شمارش شد تا زمان پردازش دقیقی به دست آید و میانگین مقدار به دست آمد. جدول ۳ آمار زمان اجرا را از طریق آمار زمان پردازش سه مدل نشان می دهد.
تجزیه و تحلیل آماری نشان داد که الگوریتم نقشه برداری موقعیت جغرافیایی کارایی پردازش بالایی دارد. زمان اجرا الگوریتم با اندازه مدل ارتباطی نداشت زیرا الگوریتم نگاشت موقعیت جغرافیایی به بازده محاسبه ماتریس بستگی داشت. بنابراین، زمان پردازش الگوریتم ناچیز بود.
۴٫۲٫۲٫ عملکرد الگوریتم استخراج رابطه طبقه
الگوریتم استخراج رابطه طبقه برای ایجاد IGSMBuildingStorey استفاده شد که عمدتاً شماره طبقه را تولید می کند. در این آزمایش، سه مدل BIM توسط الگوریتم ها به طور جداگانه پردازش شدند و زمان پردازش شمارش شد. علاوه بر این، زمان اجرا هر مدل چندین بار شمارش شد تا از دقت زمان پردازش اطمینان حاصل شود. مقدار میانگین نیز در نظر گرفته شد. جدول ۴ آمار زمان اجرا را نشان می دهد.
تجزیه و تحلیل آماری نشان داد که الگوریتم می تواند به سرعت شماره طبقه را با زمان اجرا کمتر از ۲ ثانیه تعیین کند. زمان اجرا الگوریتم مربوط به تعداد کل طبقه بود که با افزایش تعداد سطح گسترش یافت.
۴٫۲٫۳٫ عملکرد الگوریتم استخراج مجاورت داخلی
الگوریتم استخراج مجاورت داخلی برای ایجاد فضای IGSMS با به دست آوردن روابط مجاورت داخلی هر فضای سلولی استفاده شد. علاوه بر این، روابط مجاورت بین IGSMSpace با تنظیم یک وضوح تصویر خاص اندازهگیری شد، زیرا وضوح تصویر مختلف میتواند بر کارایی پردازش الگوریتم تأثیر بگذارد. از این رو، زمان پردازش الگوریتم برای وضوح تصویر مختلف در این آزمایش در نظر گرفته شد. اطلاعات سطح عمودی (به عنوان مثال، دیوار) را می توان در تصویر نمایش داد تا از اعتبار الگوریتم اطمینان حاصل شود. بنابراین، با فرض اینکه ضخامت دیوار بیشتر از ۰٫۵ متر باشد، حداکثر وضوح تصویر روی ۰٫۵ متر تنظیم شد.
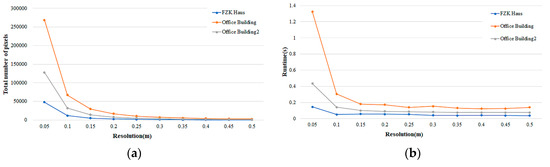
شکل ۱۹ نتیجه آماری الگوریتم استخراج مجاورت داخلی را با توجه به ۱۰ نوع وضوح تصویر مختلف که در فواصل ۰٫۵ متر تنظیم شده است نشان می دهد: سه نوع داده آزمایشی پردازش شدند و زمان پردازش و تعداد کل پیکسل های الگوریتم سپس بررسی شد. محاسبه شد.
تجزیه و تحلیل آماری نشان داد که الگوریتم استخراج مجاورت داخلی می تواند به سرعت اطلاعات مکانی عناصر IGSMSpace را با زمان اجرا کمتر از ۲ ثانیه ایجاد کند. زمانی که وضوح تصویر بیشتر از ۰٫۱ متر بود، زمان اجرای الگوریتم بدون تغییر باقی ماند. با این حال، زمان اجرا زمانی که وضوح ۰٫۰۵ متر بود به طور قابل توجهی طولانی شد ( شکل ۱۹ ب). این به افزایش سه برابری تعداد کل پیکسلها نسبت داده میشود که وضوح تصویر از ۰٫۱ به ۰٫۰۵ متر کاهش یافت که زمان پردازش الگوریتم را افزایش داد. هنگامی که وضوح تصویر بیشتر از ۰٫۱ متر بود، تعداد کل پیکسل ها به طور قابل توجهی تغییر نکرد، بنابراین زمان اجرا الگوریتم ثابت باقی ماند.
همراه با زمان اجرا و عرض دیوار واقعی، از تصاویر با وضوح ۰٫۱ متر برای ایجاد سریع اطلاعات مکانی عناصر IGSMSpace استفاده کردیم. زمان اجرا سه مدل در ۰٫۴ ثانیه حفظ شد.
به طور خلاصه، ما سه مدل معمولی BIM را در آزمایش اتخاذ کردیم و زمان اجرای الگوریتمهای مدلسازی را بهصورت آماری تحلیل کردیم. نتایج تجربی نشان داد که روش پیشنهادی میتواند به سرعت یک مدل BIM را به یک IGSM تبدیل کند.
۵٫ بحث و گفتگو
در این مطالعه، ما روشی را برای تولید خودکار مدلهای GIS داخلی بر اساس مدلهای BIM برای پشتیبانی از تحلیل مجاور فضاهای داخلی ایجاد کردیم. این روش شامل سه مرحله بود. در ابتدا، ما یک مدل جدید GIS داخلی (به عنوان مثال، IGSM) برای تشکیل ویژگی فضایی کامل داخلی ابداع کردیم. به طور عمده، مجاورت داخلی IndoorGML در مدل BIM ادغام شد. سپس، با توجه به مدل طراحی شده، یک الگوریتم مدلسازی پیشنهاد کردیم که تولید سریع خودکار IGSM از مدل BIM را تحقق میبخشد. در نهایت، برای کاربرد بالقوه در GIS سه بعدی، ما الگوریتم تحلیل مجاور K را برای بهبود توانایی تحلیل مجاور فضاهای داخلی پیشنهاد کردیم.
نتایج آزمایش اعتبار و عملکرد مدلسازی روش را پیشنهاد می کند: (۱) برای اعتبار IGSM، اثربخشی مدل در محیط GIS (شامل تجسم، پرس و جوی فضایی و تحلیل مجاور) با ترکیب IGSM تولید شده نشان داده شد. با الگوریتم تحلیل K مجاور در آزمایش. (۲) برای عملکرد مدلسازی، ما سه مدل عمومی BIM را بهعنوان اشیاء آزمایشی انتخاب کردیم، به ترتیب عملکرد الگوریتمهای مدلسازی را آزمایش کردیم، و پیشنهاد کردیم که الگوریتمها سریع و قابل استفاده مجدد هستند، که میتواند برای سایر مدلهای عمومی BIM اعمال شود. نتایج آزمایش می تواند تکرارپذیری روش را نیز نشان دهد.
در مقایسه با روش های فعلی، مزایای روش عمدتاً در جنبه های زیر نمایش داده می شود.
برای مدل GIS داخلی، IGSM پیشنهادی در مقاله دارای اطلاعات هندسی و معنایی مدل BIM بود که ویژگی فضایی اساسی GIS داخلی را نیز در خود جای داده بود. متفاوت از سایر مدلهای GIS داخلی، این مدل روابط مجاورت داخلی فضاهای سلولی لازم را داشت که ویژگیهای فضایی مدل GIS داخلی را تکمیل میکرد و پایهای را برای پرس و جو و عملکردهای تحلیل داخلی بعدی گذاشت.
برای الگوریتمهای مدلسازی، با توجه به ویژگیهای مدل BIM، یک الگوریتم مدلسازی برای ساخت یک مدل GIS داخلی از مدل BIM ارائه کردیم. الگوریتمهای مدلسازی عمدتاً یک الگوریتم جغرافیایی مرجع را با جزئیات توصیف میکنند و این واقعیت را جبران میکنند که روشهای موجود روش استخراج روابط مجاورتی مناسب برای مدل BIM ندارند. الگوریتم های مدل سازی دارای ویژگی های اتوماسیون و سریع هستند.
برای تحلیل و کاربرد فضای داخلی: بر اساس مدل IGSM، ما یک الگوریتم تحلیل مجاور K را پیشنهاد کردیم، که مدل را از پرس و جو یا تحلیل اصلی مجاور به تجزیه و تحلیل فضای سلولی با درجات مجاور مختلف گسترش داد. این الگوریتم را می توان برای تصمیم گیری دستیار پاسخ اضطراری داخلی (مانند به دست آوردن فضاهای مربوطه از درجات مختلف تحت تأثیر یک فضای آتش نشانی) استفاده کرد، که توانایی کاربرد تجزیه و تحلیل مجاور GIS داخلی را گسترش داد.
در حال حاضر، روش ارائه شده در این مقاله ویژگی خود مدل BIM (روابط اتصال) را حفظ کرده است، بنابراین پتانسیل تجزیه و تحلیل ناوبری را دارد. این روش عمدتاً مدل کلی ساختمان را هدف قرار می دهد، با توجه به اینکه ساختار فضای داخلی به تکامل خود ادامه می دهد، که چالش خاصی را برای الگوریتم های مدل سازی تشکیل می دهد. بنابراین، بهبود استحکام روش و تحقق ناوبری مسیر داخلی و خارجی بعدی و سایر کاربردها تمرکز تحقیقات بعدی ما است. موارد زیر باید در آینده مورد توجه قرار گیرند: (۱) برای تجسم، زمانی که مدل های BIM عظیم در محیط GIS ادغام می شوند، بار تجسم برنامه های بعدی را محدود می کند. از این رو، برخی از استراتژیهای تجسم (مانند LODهای CityGML و الگوریتمهای حذف) برای ایجاد یک سیستم تجسم کارآمد BIM-GIS باید در نظر گرفته شوند. (۲) برای ادغام از BIM به GIS، الگوریتم نگاشت موقعیت جغرافیایی در نظر گرفت که محور Z سیستم مختصات محلی مدل BIM بر بردار عادی بیضی عمود است، اما ممکن است در عمل خطاهایی وجود داشته باشد. در همین حال، خطای تبدیل و استراتژی مکان داخلی نیز باید با وضوح بیشتری مورد بحث قرار گیرد. بنابراین، برای اطمینان از کاربرد دقیق مدل در محیط GIS، باید یک روش موقعیتیابی دقیقتر برای تجهیز تجهیزات مکانیابی بررسی شود. الگوریتم نگاشت موقعیت جغرافیایی در نظر گرفت که محور Z سیستم مختصات محلی مدل BIM بر بردار عادی بیضی عمود است، اما ممکن است در عمل خطاهایی وجود داشته باشد. در همین حال، خطای تبدیل و استراتژی مکان داخلی نیز باید با وضوح بیشتری مورد بحث قرار گیرد. بنابراین، برای اطمینان از کاربرد دقیق مدل در محیط GIS، باید یک روش موقعیتیابی دقیقتر برای تجهیز تجهیزات مکانیابی بررسی شود. الگوریتم نگاشت موقعیت جغرافیایی در نظر گرفت که محور Z سیستم مختصات محلی مدل BIM بر بردار عادی بیضی عمود است، اما ممکن است در عمل خطاهایی وجود داشته باشد. در همین حال، خطای تبدیل و استراتژی مکان داخلی نیز باید با وضوح بیشتری مورد بحث قرار گیرد. بنابراین، برای اطمینان از کاربرد دقیق مدل در محیط GIS، باید یک روش موقعیتیابی دقیقتر برای تجهیز تجهیزات مکانیابی بررسی شود.