
وسایل نقلیه هوایی بدون سرنشین ; ردیابی هدف ؛ هدایت پرواز ؛ برآورد دولتی
۱٫ مقدمه
۲٫ شرح مشکل
۲٫۱٫ مدل سازی پهپاد
در طول کار ردیابی هدف، پهپاد باید در حالی که فاصله ایمن را حفظ می کند، به دور هدف بچرخد. هر پهپاد دارای خلبان خودکار است، بنابراین در اینجا، ما از یک مدل سرفصل مرتبه اول ساده شده استفاده می کنیم. مدل پهپاد دو بعدی به شرح زیر مشتق شده است:
جایی که [x,y]موقعیت پهپاد است، V سرعت پهپاد است، ψزاویه سمت است و a ضریب بار جانبی است که ورودی کنترل است.
۲٫۲٫ مدل سازی هدف زمینی
وضعیت دقیق هدف برای ردیابی مورد نیاز است. می توان فرض کرد که ارتفاع هدف ثابت است زیرا هدف زمینی دارای دامنه حرکت کمی است. معادله حالت برای مدل هدف به صورت زیر است:
جایی که ωtیعنی نرخ چرخش، ψtعنوان هدف زمینی است و Vtبه معنای سرعت هدف زمینی است. دشواری تخمین حرکت هدف این است که نرخ چرخش ωtناشناخته است. در این مقاله، نرخ چرخش هدف به عنوان یک سوگیری تعمیمیافته b بررسی شده و از b برای نشان دادن استفاده میکنیمωt. سوگیری به عنوان یک مدل پیاده روی تصادفی مدلسازی میشود:
فرض بر این است که پهپاد مجهز به سنسور تشخیص هدف (TDS) برای به دست آوردن موقعیت هدف است. اندازه گیری های TDS شامل برد و آزیموت (نسبت به موقعیت پهپاد) هدف است. اندازه گیری (r,ϕ)Tرا می توان به صورت زیر تعریف کرد:
جایی که (xtk,ytk)و (xk,yk)به ترتیب موقعیت هدف و پهپاد هستند، vkنویز اندازه گیری است و ماتریس کوواریانس نویز آن به شکل زیر بیان می شود:
۳٫ برآورد کشورهای هدف
۳٫۱٫ فیلتر کالمن کیوباتور
وضعیت هدف زمینی به عنوان انتخاب می شود μt=(xt,yt,ψt). برای توضیح، از فرمول زیر برای نشان دادن معادله حرکت هدف استفاده می کنیم:
پس از گسسته سازی، سیستم را می توان با سیستم های گسسته زیر توصیف کرد:
جایی که yk=(rk,ϕk). برای سیستم های فوق، فرم استاندارد فیلتر کالمن به صورت زیر است:
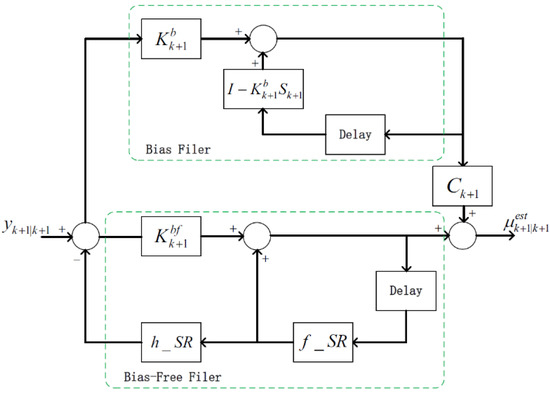
۳٫۲٫ فیلتر کالمن دو مرحله ای
۳٫۲٫۱٫ فیلتر کالمن بدون تعصب
برای توضیح، از فرمول زیر برای نشان دادن تولید نقطه مکعبی فیلتر بدون بایاس استفاده می کنیم.
ما از فرمول زیر برای نشان دادن معادله سیستم و معادله مشاهده که به ترتیب با نقطه مکعب و قانون کروی-شعاعی محاسبه می شوند استفاده می کنیم. اجرای الگوریتم خاص تولید نقطه مکعبی و قانون کروی شعاعی را می توان در مرجع [ ۲۵ ] یافت.
از سوی دیگر، نوآوری فیلتر بدون بایاس به عنوان ورودی فیلتر بایاس استفاده خواهد شد.
۳٫۲٫۲٫ تعصب کالمن فیلتر
فرمولهای بهروزرسانی نوآوری و افزایش برای فیلتر بایاس در ادبیات [ ۸ ] به شرح زیر مشتق شدهاند:
۳٫۲٫۳٫ محاسبه ماتریس کوپلینگ
جفت شدن فیلتر بدون بایاس و خروجی فیلتر بایاس برای تخمین وضعیت خودرو با ماتریس قابل دستیابی است. Ckاز طریق معادله زیر:
۴٫ قانون هدایت و ثبات مجانبی
۴٫۱٫ قانون هدایت چرخشی هماهنگ
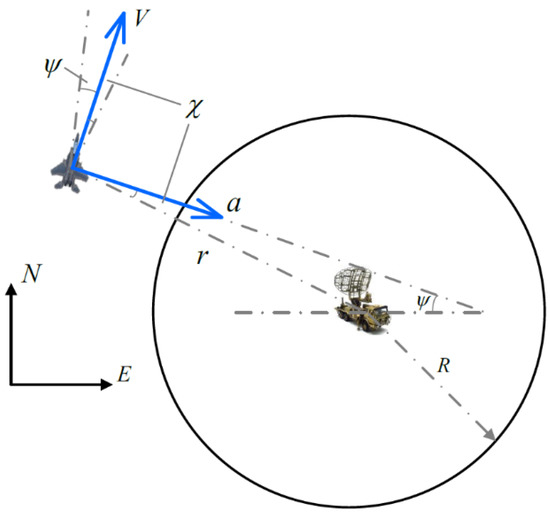
در قسمت قبل اطلاعات موقعیت هدف را به دست آوردیم (xt,yt)با دقت بالا فاصله r بین پهپاد و هدف زمینی است r=(x−xt)2+(y−yt)2−−−−−−−−−−−−−−−−−√. بنابراین، ما می توانیم r و را انتخاب کنیمχبه عنوان متغیرهای حالت سیستم ردیابی [ ۲۶ ]. حرکت دایره ای پهپاد در اطراف هدف زمینی را می توان به عنوان مانور چرخشی هماهنگ محور هدف در نظر گرفت که در شکل ۲ نشان داده شده است . معادلات سیستم را می توان به صورت زیر نوشت:
جایی که χ∈[−π,π]و جهت مثبت آن خلاف جهت عقربه های ساعت است.
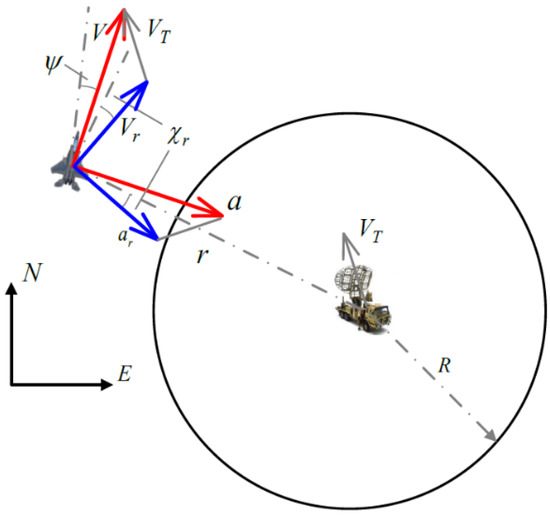
معادلات سیستم را می توان به صورت زیر نوشت:
رابطه بین arو a است:
به راحتی می توان فهمید که با توجه به شعاع دایره R ، ضریب بار جانبی در نقطه تعادل برابر است با:
برای سرعت بخشیدن به همگرایی الگوریتم کنترل، انحرافات جانبی معمولاً به حلقه بازخورد وارد می شوند و قانون راهنما به صورت زیر است:
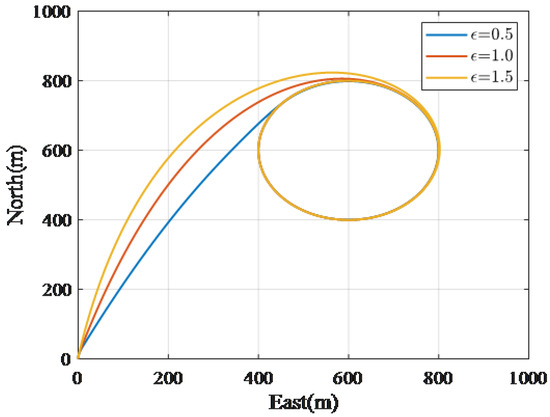
جایی که d=r−Rو kpیک ضریب متناسب است. با این حال، هنگامی که نقطه شروع از نقطه هدف دور است، یعنی زمانی که d بسیار بزرگ است، احتمالاً پهپاد در یک حرکت دایره ای در اطراف نقطه شروع حرکت می کند. برای غلبه بر این مشکل به معرفی می پردازیم χبه حلقه بازخورد سپس، قانون هدایت جانبی هماهنگ بهبود یافته (ICLGL) به شرح زیر است:
جایی که εو k ثابت مثبت هستند. اعمال معادله ( ۲۱ ) به معادله ( ۱۶ ) و اجازه دادن r˙=۰و χ˙=۰، می توانیم نقطه تعادل را بدست آوریم: r0=Rو χ۰=۰.
۴٫۲٫ تجزیه و تحلیل پایداری مجانبی
لم ۱٫
اثبات
فرض کنید χ∈[π,۳π۲]، سپس sinχ≤۰و cosχ≤۰. در نظر گرفتن:
فرض کنید χ∈[π,۳π۲]، سپس sinχ≤۰و cosχ≤۰. در نظر گرفتن:
لم ۲٫
اثبات
لم ۳٫
اثبات
فرض کنید ، سپس ، . در نظر گرفتن:
فرض کنید ، در نظر گرفتن:
اثبات
تابع لیاپانوف زیر را در نظر بگیرید:
دیدن آن آسان است . چه زمانی و ، . دیفرانسیل معادله ( ۲۶ ) را می توان به صورت زیر بیان کرد:
از Lemma 3 می دانیم که چه زمانی ، در مجموعه خواهد بود پس از مدتی، بنابراین ما فقط باید مورد را در نظر بگیریم . چه زمانی ، ، پس فقط باید ثابت کنیم . اجازه دهید . در نظر گرفتن:
از مورد ۱ و مورد ۲ می دانیم که:
۴٫۳٫ تحلیل خطی
در این بخش، تحلیل خطی قانون ارشاد ارائه شده است. چه زمانی با استفاده از معادله ( ۲۱ ) در معادله ( ۱۶ ) و خطی کردن معادله سیستم در ، با استفاده از بسط Taylor، می توانیم به دست آوریم:
زیرا ، سپس . با توجه به رابطه ( ۳۰ )، معادله سیستم خطی را در مورد d بدست می آوریم :
وضعیت سیستم را به عنوان انتخاب می کنیم ، ; بنابراین، معادله ( ۳۱ ) را می توان به زیر تغییر داد:
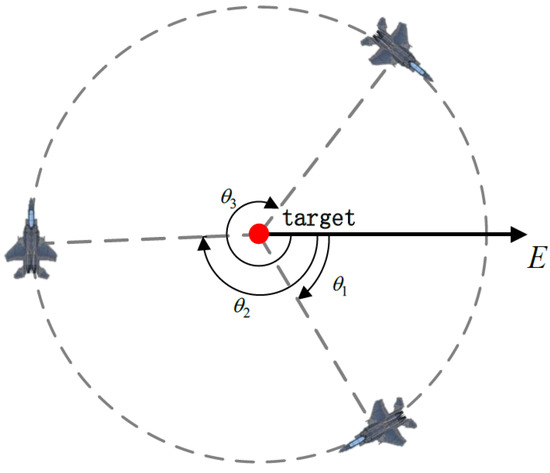
۴٫۴٫ هماهنگی ردیابی هدف توسط پهپادهای متعدد
برای اطمینان از و همگرا به ، معادله لیاپانوف زیر را انتخاب می کنیم:
مشتق زمانی معادله لیاپانوف:
ساختن ، سرعت زاویه ای هر UCAV را می توان به صورت زیر بیان کرد:
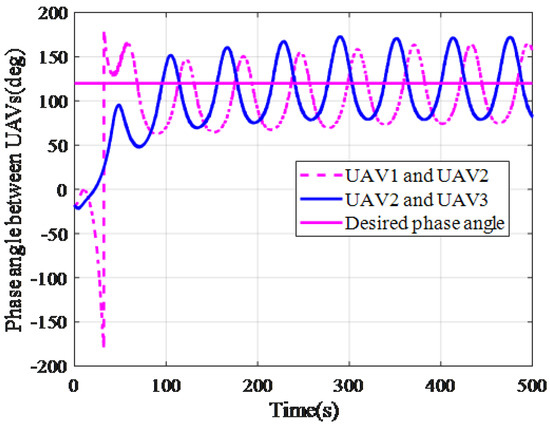
جایی که سرعت افقی مورد نظر پهپادها، R مسافت ردیابی است، و مقادیر ثابت مثبت هستند.
به عنوان . فاز بین هر UCAV به همگرا خواهد شد . با فرض اینکه پهپاد ۲ در اطراف هدف پرواز می کند، بنابراین، می توانیم به دست آوریم . توجه داشته باشید که ، سپس می توانیم قانون هدایت جانبی مورد نظر را بدست آوریم:
جایی که ضریب بار جانبی محاسبه شده توسط ICLGL است که در بخش ۴ پیشنهاد شده است.
۵٫ شبیه سازی ها و نتایج
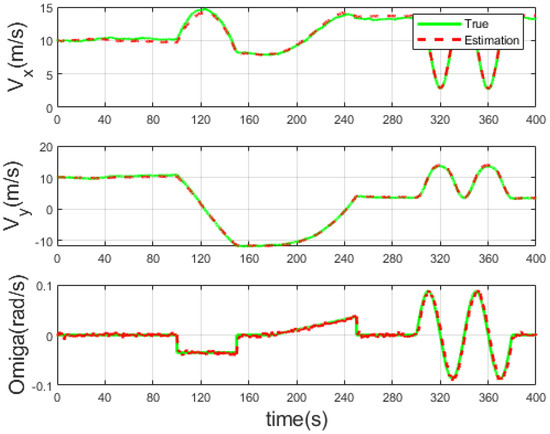
۵٫۱٫ نتایج تخمین توسط OTSCKF
بیان ریاضی از ، ، و هستند:
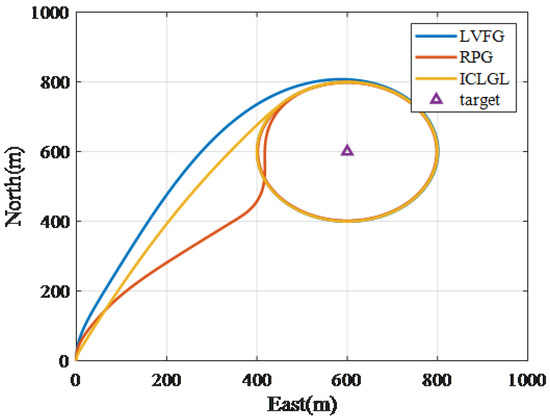
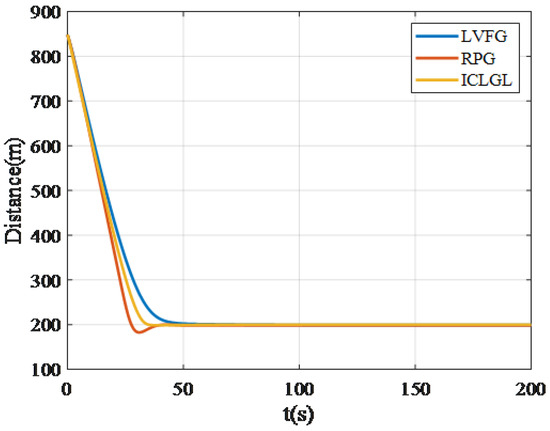
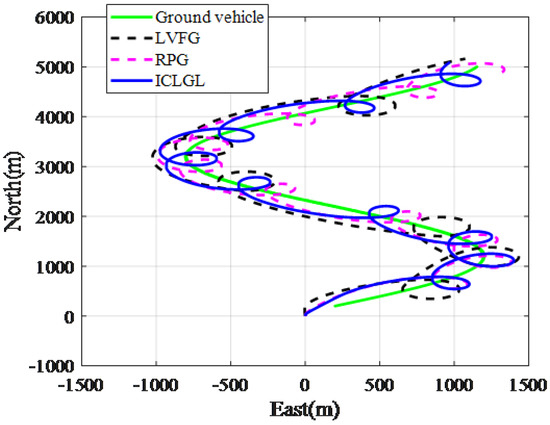
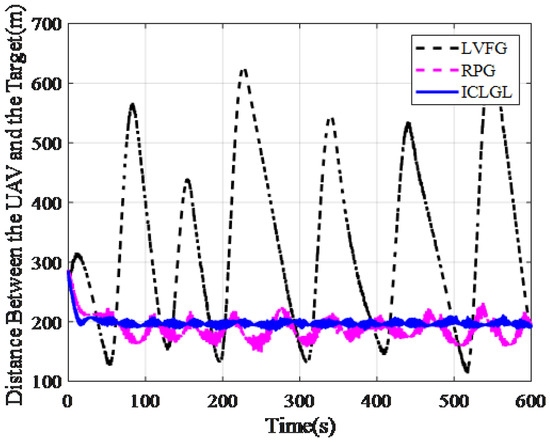
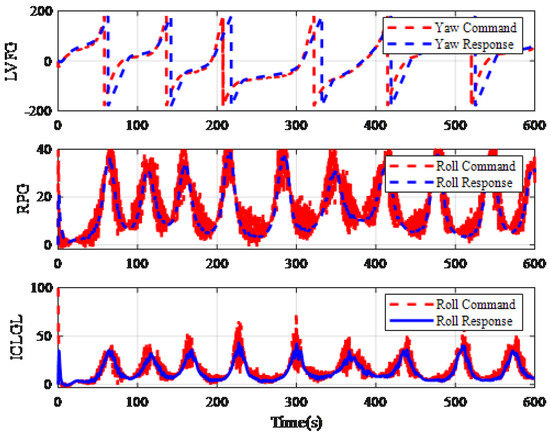
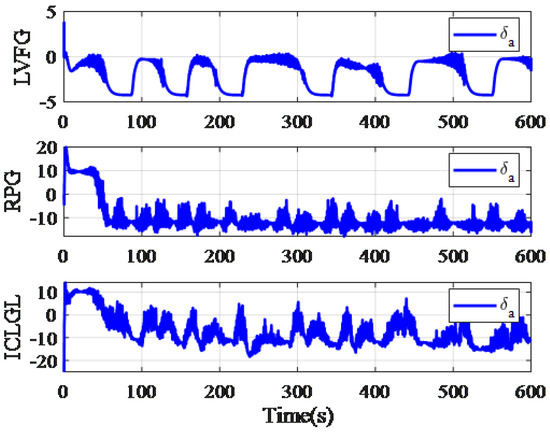
۵٫۲٫ ردیابی هدف توسط ICLGL
۵٫۳٫ ردیابی هدف بر اساس OTSCKF
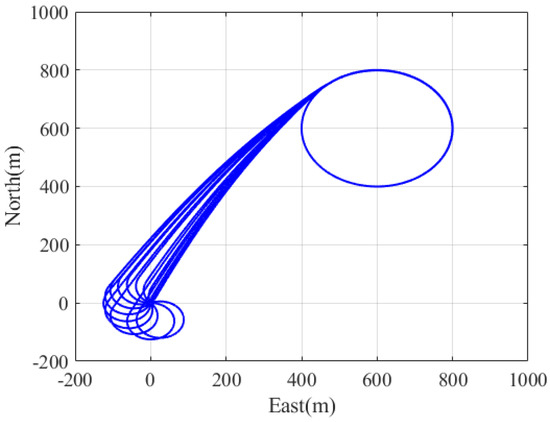
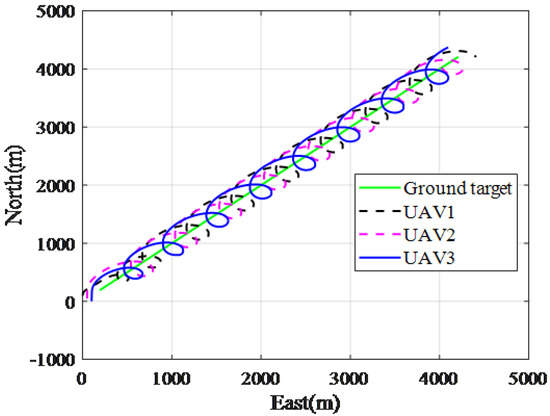
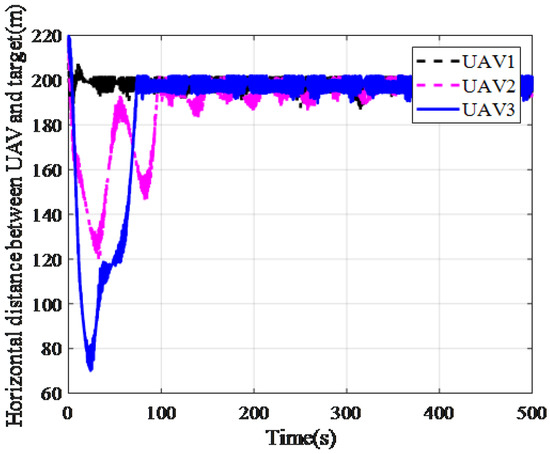
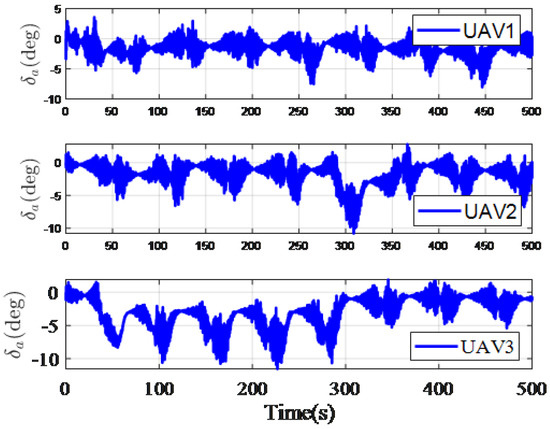
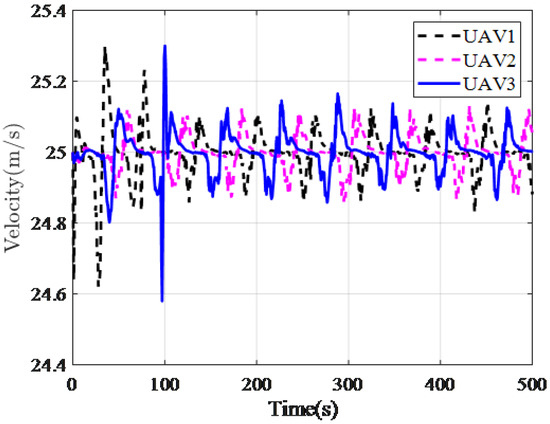
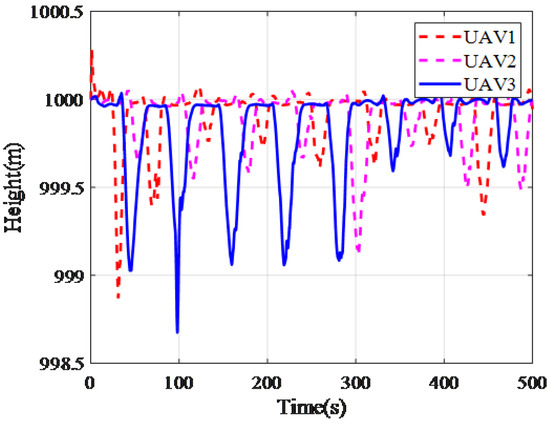
۵٫۴٫ ردیابی هدف هماهنگ
۶٫ نتیجه گیری
مشارکت های نویسنده
منابع مالی
بیانیه هیئت بررسی نهادی
بیانیه رضایت آگاهانه
بیانیه در دسترس بودن داده ها
قدردانی
تضاد علاقه
منابع
- اوگرن، پی. Backlund، A.; هریسون، تی. کریستنسون، ال. Stensson، P. ماموریت های ضربه ای UCAV خودمختار با استفاده از عملکردهای لیاپانوف کنترل رفتار. در مجموعه مقالات کنفرانس و نمایشگاه راهنمای، ناوبری و کنترل AIAA، کیستون، CO، ایالات متحده آمریکا، ۲۱ تا ۲۴ اوت ۲۰۰۶٫ [ Google Scholar ]
- ارکان، س. کاندمیر، م. Giger, G. تکلیف پیشرفته برای وسایل نقلیه هوایی جنگی بدون سرنشین که کارایی هزینه و بقا را هدف قرار می دهند. در مجموعه مقالات چهل و ششمین نشست و نمایشگاه علوم هوافضا AIAA، Reno، NV، ایالات متحده، ۷-۱۰ ژانویه ۲۰۰۸٫ پ. ۸۷۳٫ [ Google Scholar ]
- وانگ، سی کیو; فنگ، LI; Zhang, J. نظرسنجی در مورد سیستم UCAV. الکترون. انتخاب کنید کنترل ۲۰۰۴ ، ۹ ، ۴۱-۴۵٫ [ Google Scholar ]
- لین، سی. شی، ج. ژانگ، دبلیو. Lyu, Y. Standoff ردیابی یک هدف زمینی بر اساس قانون هدایت چرخشی هماهنگ. ISA Trans. ۲۰۲۲ ، ۱۱۹ ، ۱۱۸-۱۳۴٫ [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یی، اس. او، ز. شما، X. چونگ، ی.-ام. ردیابی تک شیء از طریق ترکیب قوی فیلتر ذرات و نمایش پراکنده. فرآیند سیگنال ۲۰۱۵ ، ۱۱۰ ، ۱۷۸-۱۸۷٫ [ Google Scholar ] [ CrossRef ]
- او، س. ژانگ، دبلیو. هوانگ، دی. چن، اچ. Liu, J. عیبیابی واحد اندازهگیری اینرسی هواپیما بر اساس CKF دو مرحلهای بهینه. Xibei Gongye Daxue Xuebao/J. شمال غربی. پلی تک. دانشگاه ۲۰۱۸ ، ۳۶ ، ۹۳۳-۹۴۱٫ [ Google Scholar ] [ CrossRef ]
- فریدلند، ب. درمان سوگیری در فیلترینگ بازگشتی. IEEE Trans. خودکار کنترل ۱۹۶۹ ، ۱۴ ، ۳۵۹-۳۶۷٫ [ Google Scholar ] [ CrossRef ]
- علوانی، AT; شیا، پی. برنج، TR; بلر، WD در مورد بهینه بودن تخمین حالت دو مرحله ای در حضور سوگیری تصادفی. IEEE Trans. خودکار کنترل ۱۹۹۳ ، ۳۸ ، ۱۲۷۹-۱۲۸۳٫ [ Google Scholar ] [ CrossRef ]
- Hsieh, CS; چن، FC راه حل بهینه برآوردگر کالمن دو مرحله ای. IEEE Trans. خودکار کنترل ۱۹۹۹ ، ۴۴ ، ۱۹۴-۱۹۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مشهد، AM; کارساز، ع. ردیابی ربات چندگانه زیر آب با مانور بالا مشهدی، SKM با فیلتر کالمن دو مرحله ای بهینه و ترکیب داده مبتنی بر شبکه عصبی هاپفیلد رقابتی. بین المللی J. Commun. انتشار آنتن ۲۰۱۳ ، ۳ ، ۱۹۱-۱۹۸٫ [ Google Scholar ]
- Frew، EW; لارنس، دی. موریس، اس. ردیابی توقف اهداف متحرک با استفاده از فیلدهای بردار هدایت لیاپانوف. جی. گاید. Dyn را کنترل کنید. ۲۰۰۸ ، ۳۲ ، ۲۹۰-۳۰۶٫ [ Google Scholar ] [ CrossRef ]
- هونگ، جی. کیم، ی. Bang, H. ردیابی هدف الگوی دایره ای تعاونی با استفاده از تابع ناوبری. هوانوردی علمی تکنولوژی ۲۰۱۸ ، ۷۶ ، ۱۰۵-۱۱۱٫ [ Google Scholar ] [ CrossRef ]
- پارک، اس. دیست، ج. چگونه، J. منطق هدایت غیرخطی جدید برای ردیابی مسیر. در مجموعه مقالات کنفرانس و نمایشگاه هدایت، ناوبری و کنترل AIAA، پراویدنس، RI، ایالات متحده آمریکا، ۱۶ تا ۱۹ اوت ۲۰۰۴٫ صص ۱-۱۸٫ [ Google Scholar ]
- لی، جی. کیم، اچ جی; قانون هدایت ضربه-زمان-کنترل قابل تنظیم Kim, HJ در برابر هدف غیرمانوردهنده تحت میدان دید محدود. Proc. Inst. مکانیک. مهندس قسمت G J. Aerosp. مهندس ۲۰۲۱ ، ۲۳۶ ، ۳۶۸-۳۷۸٫ [ Google Scholar ] [ CrossRef ]
- پارک، S. چرخش بر روی یک هدف با یاتاقان جانبی نسبی. جی. گاید. Dyn را کنترل کنید. ۲۰۱۶ ، ۳۹ ، ۱۴۵۰-۱۴۵۶٫ [ Google Scholar ] [ CrossRef ]
- پارک، قانون راهنمای S. برای ردیابی یک شی متحرک. جی. گاید. Dyn را کنترل کنید. ۲۰۱۷ ، ۴۰ ، ۲۹۴۸-۲۹۵۵٫ [ Google Scholar ] [ CrossRef ]
- پهپاد Cao، Y. دور یک هدف ناشناخته با استفاده از اندازهگیری برد و نرخ برد تخمینی. در مجموعه مقالات کنفرانس کنترل آمریکا ۲۰۱۴، پورتلند، ON، ایالات متحده آمریکا، ۴ تا ۶ ژوئن ۲۰۱۴٫ صص ۴۵۸۱-۴۵۸۶٫ [ Google Scholar ]
- پهپاد Cao، YC در حال دور زدن یک هدف ناشناخته در محیطی که از GPS محروم است با اندازه گیری فقط برد. Automatica ۲۰۱۵ ، ۵۵ ، ۱۵۰-۱۵۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- حکیم، RAS؛ Rysdyky، هماهنگی پهپاد RT برای ردیابی هدف خودمختار. در مجموعه مقالات کنفرانس و نمایشگاه هدایت، ناوبری و کنترل AIAA، کیستون، CO، ایالات متحده آمریکا، ۲۱ تا ۲۴ اوت ۲۰۰۶٫ پ. ۶۴۵۳٫ [ Google Scholar ]
- کوینترو، اس. Copp، DA; هماهنگی پهپاد قوی Hespanha، JP برای ردیابی هدف با استفاده از کنترل پیشبینی مدل خروجی-بازخورد با تخمین افق متحرک. در مجموعه مقالات کنفرانس کنترل آمریکایی ۲۰۱۵ (ACC)، شیکاگو، IL، ایالات متحده آمریکا، ۱ تا ۳ ژوئیه ۲۰۱۵؛ صص ۳۷۵۸–۳۷۶۴٫ [ Google Scholar ]
- آدامی، ای. اوزگونر، U. رویکرد غیر متمرکز برای ردیابی و نظارت چند هدفه چند پهپاد. بین المللی Soc. انتخاب کنید Photonics ۲۰۱۲ ، ۸۳۸۹ ، ۳۰۷-۳۱۲٫ [ Google Scholar ]
- Moseley, MB; گروچولسکی، BP; چونگ، سی. سینگ، اس. ردیابی هدف مشترک پهپاد/UGV دوربرد. در فناوری سیستم های بدون سرنشین XI ; انجمن بین المللی اپتیک و فوتونیک: بلینگهام، WA، ایالات متحده آمریکا، ۲۰۰۹; جلد ۷۳۳۲، ص. ۷۳۳۲۰۴٫ [ Google Scholar ]
- کوی، ایکس. جینگ، ز. لو، ام. گوا، ی. Qiao, H. روشی جدید برای تخمین وضعیت شارژ باتریهای لیتیوم یونی با استفاده از فیلتر کالمن مکعبی ریشه مربع. Energies ۲۰۱۸ ، ۱۱ ، ۲۰۹٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- نورمحمدی، ح. کیقوبادی، جی. سیستم غیرمتمرکز INS/GNSS با سنسورهای اینرسی درجه MEMS با استفاده از CKF فاکتورسازی QR. IEEE Sens. J. ۲۰۱۷ , ۱۷ , ۳۲۷۸–۳۲۸۷٫ [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. لیو، ایکس. ژانگ، دبلیو. یانگ، ی. الگوریتم ناوبری پهپاد مدل چندگانه بر اساس فیلتر کالمن مکعبی قوی. دسترسی IEEE ۲۰۲۰ ، ۸ ، ۸۱۰۳۴–۸۱۰۴۴٫ [ Google Scholar ] [ CrossRef ]
- ژائو، ایکس. لین، دبلیو. هائو، جی. زو، ایکس. Yuan, J. خوشه بندی و جستجوی الگو برای افزایش بهینه سازی ازدحام ذرات با جستجوی همسایگی فضایی اقلیدسی. محاسبات عصبی ۲۰۱۶ ، ۱۷۱ ، ۹۶۶-۹۸۱ . [ Google Scholar ] [ CrossRef ]
- LaSalle، JP پایداری سیستمهای غیرخودکار. مقعدی غیر خطی کاربرد روشهای تئوری ۱۹۷۶ ، ۱ ، ۸۳-۹۰٫ [ Google Scholar ] [ CrossRef ]
- پارک، اس. دیست، ج. چگونگی، عملکرد JP و پایداری لیاپانوف یک مسیر غیرخطی به دنبال روش هدایت. جی. گاید. Dyn را کنترل کنید. ۲۰۰۷ ، ۳۰ ، ۱۷۱۸-۱۷۲۸٫ [ Google Scholar ] [ CrossRef ]



بدون دیدگاه