۱٫ معرفی
اکثر مطالعات اهداف کشتی را با استفاده از تصویربرداری نوری [ ۱ ، ۲ ] و اطلاعات رادار [ ۳ ، ۴ ، ۵ ، ۶ ] شناسایی کرده اند. با این حال، مسیرهای هدف حاوی ویژگی های حرکتی غنی هستند [ ۷ ]. بنابراین، شناسایی هدف بر اساس مسیرها یک جهت تحقیقاتی مهم در زمینه شناسایی هدف است و پتانسیل تحقیقاتی بالایی دارد. استخراج ویژگی یک مرحله مهم در تشخیص هدف است. دو راه اصلی برای استخراج ویژگیها وجود دارد: کاردستی و یادگیری. ویژگی های دست ساز معمولاً شامل ویژگی های سرعت و ویژگی های فرمان است [ ۸ ، ۹ ، ۱۰]. با توجه به تجربه، برخی از ویژگی های مشخصه آماری برای تشخیص انواع مختلف اهداف طراحی شده اند. یادگیری ویژگی یک تکنیک یادگیری عمیق است. شبکه عصبی برای یادگیری داده های مسیر و به دست آوردن نمایش ویژگی طراحی شده است [ ۱۱ ، ۱۲ ].
با این حال، زمانی که تفاوت در ویژگیهای حرکتی در بین اهداف مختلف قابل توجه نباشد، تشخیص هدف تنها از طریق مسیرها دشوار خواهد بود. در تحقیق تشخیص هدف کشتی توسط مسیر، استفاده از اطلاعات زمینه وجود ندارد. پس زمینه موقعیت جغرافیایی هدف خالی نیست. اهداف دارای اطلاعات پسزمینه متفاوتی در مکانهای مکانی و زمانی مختلف هستند که ویژگیهای زمینه را به مسیرهای هدف اضافه میکند. به عنوان مثال، مسیر کشتی های باری اقیانوس پیما اغلب در اعماق دریا ظاهر می شود، در حالی که مسیر قایق های تندرو کوچک بیشتر در آب های نزدیک ساحل توزیع می شود. قوانین استخراج در اطلاعات زمینه اهداف مختلف کشتی و بکارگیری آنها برای شناسایی هدف می تواند اطلاعات مسیر را افزایش دهد. از این رو، مسیرهای بین انواع مختلف اهداف متمایزتر هستند، بنابراین نوع هدف را با دقت بیشتری تشخیص می دهند. در تحقیق تشخیص هدف زمین بر اساس مسیر، محققان تلاش کرده اند تا دانش زمینه را به اطلاعات تصمیم گیری به عنوان راهی برای بهبود توانایی مدل اضافه کنند. در تحقیق شناسایی هدف زمین توسط مسیر، از اطلاعات زمینه به عنوان نوعی اطلاعات کمکی برای بهبود توانایی تشخیص استفاده می شود. نتایج خوبی به دست آمده است. یک مطالعه [ اطلاعات زمینه به عنوان نوعی اطلاعات کمکی برای بهبود توانایی تشخیص استفاده می شود. نتایج خوبی به دست آمده است. یک مطالعه [ اطلاعات زمینه به عنوان نوعی اطلاعات کمکی برای بهبود توانایی تشخیص استفاده می شود. نتایج خوبی به دست آمده است. یک مطالعه [۱۳ ] اطلاعات مشخصه ای در مورد یک ایستگاه استخراج کرد. مطالعه دیگری [ ۱۴ ] اطلاعات مربوط به توقف در مکان های مهم را تجزیه و تحلیل کرد. مطالعه دیگری [ ۱۵ ] اطلاعات زمینه مانند نوع زمین، شیب، ارتفاع، دما و رطوبت را هنگام انجام اندازهگیریهای شباهت مسیرهای طوفان معرفی کرد. هنگام تجزیه و تحلیل مسیرهای دو ببر، یک مطالعه [ ۱۶ ] برخی از عوامل زمینه ای را در نظر گرفت: شیب، تراکم پوشش گیاهی، تراکم طعمه، و نزدیکی به مرز. با این حال، متفاوت از زمین، هیچ ساختمان شاخص متعددی در دریا وجود ندارد، هیچ محدودیت جاده ای ثابت وجود ندارد، و پس زمینه دریا ساده است. بنابراین، اعمال روش های فوق به طور مستقیم برای تحلیل مسیر دریا دشوار است.
با توجه به مشکلات فوق، این مقاله یک پایگاه دانش زمینه از جنبههای تراکم ترافیک دریایی، فاصله هدف تا ساحل، و فاصله هدف تا بندر برای افزایش اطلاعات مسیر ایجاد میکند. بر این اساس، ویژگیهای موجود در اطلاعات مسیر و اطلاعات زمینه به ترتیب با استفاده از مدلهای ترانسفورماتور و حافظه کوتاهمدت (LSTM) استخراج میشوند. سپس، ویژگی ها برای به دست آوردن بردارهای ویژگی جامع برای دستیابی به تشخیص دقیق تر هدف، ترکیب می شوند. این مقاله به شرح زیر سازماندهی شده است. بخش ۲ مروری بر مطالعات مرتبط ارائه می کند. بخش ۳ شرح مشکل را ارائه می دهد. بخش ۴ روش پیشنهادی ما را ارائه می دهد. بخش ۵ آماده سازی مجموعه داده را نشان می دهد.بخش ۶ آزمایش ها و تجزیه و تحلیل ها را نشان می دهد. بخش ۷ برخی از نتایج را بیان می کند.
۲٫ بررسی آخرین هنر
مسیر متشکل از نقاطی است که هدف در یک دوره زمانی ایجاد می کند و نقاط مسیر از یک ترتیب زمانی پیروی می کنند. مسیر یک سری زمانی معمولی است [ ۱۷ ]. بنابراین، تشخیص هدف بر اساس مسیرها یک مسئله طبقه بندی سری زمانی (TSC) است. مطالعات گسترده ای در مورد TSC انجام شده است. با این حال، آنها نتوانستند ویژگی های حرکتی مسیرها را ثبت کنند. یک مطالعه [ ۱۸ ] روشی را مبتنی بر اندازهگیری فاصله پیشنهاد کرد که از تابخوردگی زمانی پویا (DTW) برای اندازهگیری شباهت بین سریهای زمانی استفاده کرد. مطالعه دیگری [ ۱۹ ] یک روش تبدیل شکل شکل را نشان داد که سری های زمانی را به فضاهای دیگر تبدیل کرد. بنابراین، انواع مختلف سری های زمانی قابل تفکیک تر بودند. یک مطالعه [۱۷ ] تلاش کرد تا ۳۵ طبقهبندی کننده را ترکیب کند تا توانایی طبقهبندی مدل را بهبود بخشد. آنها ویژگی های حرکتی اهداف را در فرآیند طبقه بندی در نظر نگرفتند. برای کار مشخص طبقهبندی سری مسیر، محققان توجه بیشتری به ویژگیهای حرکتی هدف دادهاند. ایده اصلی استخراج ویژگی های حرکت سری مسیر و سپس طبقه بندی مسیرها است. مسیر یک دنباله چند بعدی است که اطلاعات غنی را برای استخراج ویژگی حرکت ارائه می دهد. مسیرهای تولید شده توسط انواع مختلف هدف معمولاً ویژگی های حرکتی متفاوتی دارند. به عنوان مثال، سرعت یک قایق تندرو اغلب بیشتر از یک کشتی باری است و قدرت مانور آن نیز بیشتر از کشتی باری است. یک مطالعه [ ۸] از الگوریتم منطق فازی برای پیش بینی انواع اهداف با توجه به مسیرها استفاده کرد. انواع هدف به “خواسته” و “ناخواسته” طبقه بندی شدند، که یک مشکل طبقه بندی باینری است. با این حال، تعداد کمی از توابع عضو در مقاله برای رسیدگی به وظایف تشخیص پیچیده تر وجود داشت. در مطالعه دیگری [ ۹ ]، ویژگی های مسیر بیشتری در نظر گرفته شد. بنابراین، توابع عضو بیشتری برای بهبود توانایی تشخیص مدل اضافه شد. الگوریتم های منطق فازی به طور گسترده مورد استفاده قرار گرفته اند [ ۲۰ ، ۲۱ ، ۲۲ ]، اما تعیین توابع اعضا نه تنها به دانش حرفه ای عمیق بلکه به تجربه غنی نیاز دارد. یک مطالعه [ ۱۰] از یک ماشین بردار پشتیبان (SVM) برای طبقه بندی مسیرها استفاده کرد که اثربخشی یادگیری ماشین را در حل مشکل تشخیص هدف بر اساس مسیرها تأیید می کرد. مطالعه دیگری [ ۲۳ ] ویژگی های بیشتری را برای SVM استخراج کرد. مطالعه دیگری [ ۲۴ ] یک مدل مخلوط گاوسی را برای تشخیص مسیرهای پرواز از مسیرهای غیر پروازی پیشنهاد کرد. با این حال، نسبت دو نوع مسیر به عنوان اطلاعات قبلی مورد نیاز است که برای کاربردهای عملی قابل اجرا نیست. مطالعه دیگری [ ۲۵] سه الگوی حرکت از مسیرها را پیشنهاد کرد و سپس ویژگی های سه الگوی حرکت را استخراج کرد. تقسیم سه الگوی حرکت در استخراج ویژگی های مسیرها در حالات حرکتی مختلف مفید است. با این حال، فرآیند طبقه بندی الگوی حرکت و استخراج ویژگی پیچیده است. در یک مطالعه [ ۲۶ ]، یک استخراج کننده ویژگی خودکار طراحی شد. تجزیه و تحلیل مؤلفه اصلی (PCA) برای تجزیه و تحلیل ویژگی های استخراج شده استفاده شد و سپس بسیاری از طبقه بندی های یادگیری ماشین برای دستیابی به طبقه بندی پذیرفته شدند. اگرچه روش های یادگیری ماشینی عملکرد خوبی دارند، طراحی و تجزیه و تحلیل ویژگی های آماری پیچیده است. برخی از محققان سعی کرده اند از روش های یادگیری عمیق استفاده کنند. یک مطالعه [ ۱۱] یک شبکه عصبی تکراری (RNN) برای تشخیص انواع کشتی طراحی کرد و دیگری [ ۱۲ ] از پرسپترون چندلایه (MLP) برای شناسایی کشتی های باری، قایق های ماهیگیری و کشتی های مسافربری استفاده کرد. این مطالعه امکانسنجی روشهای یادگیری عمیق را در حل این مشکل تأیید کرد.
دو نوع سیستم اطلاعات جغرافیایی (GIS) وجود دارد: سیستم های پردازش تراکنش و سیستم های پشتیبانی تصمیم [ ۲۷ ]. در این مقاله از اطلاعات جغرافیایی به عنوان نوعی اطلاعات پشتیبان تصمیم گیری استفاده شده است که به شناسایی کشتی ها در محیط دریایی کمک می کند. در ترافیک دریایی معمولاً از GIS برای پشتیبانی از نظارت دریایی استفاده می شود. در یک مطالعه [ ۲۸ ]، از GIS برای تجزیه و تحلیل الگوهای فضایی سوانح دریایی برای بهبود مدیریت ترافیک دریایی استفاده شد. مطالعه دیگری [ ۲۹] GIS و تصمیم گیری چند معیاره را برای ارزیابی و ترسیم ریسک حمل و نقل دریایی ترکیب کرد. GIS برای ارائه اطلاعات در فرآیند تصمیم گیری معنادار است. نحوه بکارگیری GIS برای وظایف مختلف دریایی یک جهت تحقیقاتی امیدوارکننده است.
۳٫ شرح مشکل
هدف معمولاً در یک زمینه خاص است و توسط آن محدود می شود. بنابراین، دقت تشخیص هدف را می توان با افزایش زمینه اطلاعات مسیر بهبود بخشید. مسیر افزایش یافته زمینه را می توان به صورت { T ; C }، که در آن T اطلاعات مسیر و C نشان دهنده اطلاعات زمینه است. نوع هدف y است و تشخیص هدف کشتی بر اساس مسیر بهبود یافته با زمینه y از { T;C } بدست میآید.
مسیر یک رکورد از موقعیت های یک هدف در یک دوره زمانی مشخص است. دادههای مسیر بهدستآمده در یک بازه نمونهبرداری معین، یک توالی چند بعدی گسسته است که از ترتیب منطقی زمانی پیروی میکند. بعد داده هر مرحله زمانی برابر است و هر بعد نشان دهنده یک ویژگی از نقطه مسیر است. مسیر را می توان به صورت زیر بیان کرد:
جایی که تیمنتیمننشان دهنده مسیر i در مجموعه داده مسیر T است. n تعداد کل نقاط مسیر در مسیر است تیمنتیمن. پمن جپمن�نشان دهنده j امین نقطه مسیر در مسیر است تیمنتیمن. هر نقطه مسیر شامل پنج بعد اطلاعات شامل عرض جغرافیایی ( lat )، طول جغرافیایی ( lon )، سرعت روی زمین ( sog )، مسیر روی زمین ( cog ) و مهر زمانی ( t ) است که میتواند به صورت زیر بیان شود:
اطلاعات زمینه C اطلاعات مربوط به محیط جغرافیایی است. محیط های جغرافیایی مختلف دارای اطلاعات متفاوتی هستند که اطلاعات بیشتری در مورد مکان هدف ارائه می دهد، نه فقط مختصات موقعیت. مشکل در تبدیل اطلاعات زمینه به اطلاعات عددی نهفته است. برای تبدیل اطلاعات زمینه، از برخی فرمول های اساسی استفاده می شود. به عنوان مثال، فاصله بین دو نقطه:
فاصله اقلیدسی برای تقریبی فاصله بین دو نقطه در سطح دریا استفاده می شود زیرا سناریوی کاربردی معمولاً یک قطعه کوچک از دریا برای یک کار خاص است. از فرمول چگالی نیز استفاده می شود:
جایی که nپ�پتعداد نقاط مسیر در یک شبکه مشخص و a مساحت شبکه است. جزئیات پایگاه دانش زمینه در بخش ۴٫۲ ارائه شده است. یک مثال کاربردی ملموس در بخش ۵٫۲ آورده شده است.
۴٫ رویکرد
۴٫۱٫ فرآیند کلی
همانطور که در شکل ۱ نشان داده شده است، روند کلی روش پیشنهادی به دو بخش تقسیم می شود: بخش اول آموزش آفلاین و قسمت دوم تشخیص آنلاین است. هدف از آموزش آفلاین به دست آوردن مدل شبکه ای است که بتوان از آن برای شناسایی هدف استفاده کرد. تشخیص آنلاین دسته هدف را با توجه به مسیر نوع هدف ناشناخته شناسایی می کند. برای بخش آموزش آفلاین، ابتدا دانش زمینه متناظر با مسیر با توجه به مجموعه داده های مسیر تاریخی و پایگاه دانش زمینه محاسبه می شود. مجموعه داده مسیر تاریخی پس از بهبود زمینه به دست می آید. سپس، شبکه عصبی با مجموعه داده مسیر تاریخی بالا ساخته و آموزش داده می شود. در نهایت، مدل شبکه عصبی آموزش دیده را ذخیره می کنیم. برای قسمت تشخیص آنلاین، ابتدا با توجه به اطلاعات مسیر، اطلاعات پایگاه دانش زمینه برای محاسبه دانش زمینه مربوط به مسیر فراخوانی می شود. دادههای مسیری که باید شناسایی شوند به دست میآیند. دوم، مدل شبکه عصبی آموزشدیده در فرآیند آموزش آفلاین نامیده میشود و مسیر بهبود یافته به متن وارد مدل شبکه میشود. در نهایت، دسته هدف خروجی است. وظیفه شناسایی دسته هدف آنلاین تکمیل شده است.
ویژگی های روش پیشنهادی مطابق با وضعیت واقعی است. آموزش آفلاین نیاز به جمع آوری یک مجموعه داده تاریخی، ایجاد پایگاه دانش زمینه و آموزش مدل دارد. فرآیند آموزش زمان زیادی را صرف می کند، قدرت محاسباتی قابل توجهی را اشغال می کند و دارای پیکربندی سخت افزاری بالایی است. بخش تشخیص آنلاین نیازهای کمتری در مصرف زمان، مصرف توان محاسباتی و پیکربندی سخت افزار دارد.
۴٫۲٫ پایگاه دانش زمینه
منطقه دریایی که هدف از آن عبور می کند دارای دانش زمینه است. اطلاعات زمینه در مکان های جغرافیایی مختلف متفاوت است. برای تشخیص موثرتر تفاوت مشخصه بین انواع مختلف اهداف، از دانش زمینه برای افزایش اطلاعات مسیر استفاده میکنیم. شکل ۲ نقشه های حرارتی مناطق فعال را برای انواع مختلف کشتی ها نشان می دهد. شکل ۲ a نقشه حرارتی کل منطقه است. شکل ۲ ب جزئیات نقشه حرارتی را نشان می دهد. داده های مورد استفاده در بخش ۴ توضیح داده شده است. ۹ نوع کشتی وجود دارد: ماهیگیری، عملیات نظامی، SAR (جستجو و نجات)، یدک کش، مسافربری، باری، تانکر، کشتی تفریحی، و کشتی های دیگر. قسمتهای قرمز نشاندهنده ناحیهای است که کشتیها اغلب در آن ظاهر میشوند و هر چه رنگ تیرهتر باشد، هدف بیشتر در آن منطقه ظاهر میشود. در مناطقی که کشتیهای انواع مختلف اغلب در آن ظاهر میشوند، تفاوتهایی وجود دارد که میتوان از آنها برای تمایز بین انواع مختلف کشتی استفاده کرد. به طور خاص، تفاوت هایی در فاصله تا ساحل در مناطقی که انواع مختلفی از کشتی ها اغلب ظاهر می شوند، وجود دارد. علاوه بر این، تراکم ترافیک در مناطق مختلف متفاوت است. سه نوع اطلاعات زمینه استخراج می شود: تراکم ترافیک دریایی، فاصله هدف تا ساحل، و فاصله هدف تا بنادر. در زیر تجزیه و تحلیل این اطلاعات زمینه ای است.
این تحقیق بر شناسایی نوع واقعی هدف با استفاده از اطلاعات مسیر و زمینه تمرکز دارد. این شامل مشکلات ردیابی نیست، با این فرض که هدف از قبل به طور پایدار ردیابی شده است.
۴٫۲٫۱٫ تراکم ترافیک دریایی
تراکم ترافیک دریایی منعکس کننده تراکم کشتی های عبوری در منطقه دریا در داده های تاریخی است. تراکم تردد در محدوده دریا با وقوع مکرر انواع مختلف اهداف متفاوت است. ما از یک شبکه عصبی برای یادگیری قوانین آن استفاده می کنیم و مبنایی را برای تشخیص هدف فراهم می کنیم. ابتدا منطقه دریا به شبکه های یکسان تقسیم می شود و تراکم ترافیک در داده های تاریخی در هر شبکه با فرمول زیر محاسبه می شود:
جایی که تیدمنتیدمنتراکم ترافیک دریایی شبکه i را نشان می دهد. nمن�منتعداد کشتی ها در شبکه i است. a نشان دهنده مساحت شبکه است. پس از به دست آمدن نقشه شبکه تراکم ترافیک دریایی، شبکه مربوط به هر نقطه از مسیر را می توان با طول و عرض جغرافیایی تعیین کرد. سپس تراکم ترافیک دریایی در هر نقطه مسیر به دست می آید. با ترتیب تراکم ترافیک دریایی در هر نقطه مسیر در ترتیب زمانی، می توان اولین اطلاعات زمینه مسیر هدف را به دست آورد:
۴٫۲٫۲٫ فاصله از هدف تا ساحل
وظایف انجام شده توسط انواع مختلف کشتی ها به ماهیت کشتی ها بستگی دارد. برخی از کشتی ها اغلب به سفرهای اقیانوسی می روند، در حالی که برخی دیگر اغلب در آب های نزدیک ساحل ظاهر می شوند. فاصله از ساحل مسیر یک کشتی، الگوهایی را در داده های تاریخی نشان می دهد که می توان از آنها برای شناسایی کشتی های ناشناخته استفاده کرد. فاصله هر نقطه از مسیر تا ساحل به ترتیب زمانی مرتب شده است. ما اطلاعات زمینه دوم را به دست می آوریم:
۴٫۲٫۳٫ فاصله از هدف تا بنادر
کشتی ها در اقیانوس در جهت های تصادفی حرکت نمی کنند. برنامه ریزی مسیر آنها ماموریت محور است و نشان می دهد که از یک بندر به بندر دیگر می روند. اگرچه موقعیت هایی مانند اجتناب، لنگر انداختن و استراحت وجود خواهد داشت، اما روند کلی قایقرانی هدف گرا است. بنابراین، اطلاعات زمینه مربوط به بندر مبداء کشتی و بندر مقصد می تواند به عنوان یک ویژگی برای شناسایی اهداف ناشناخته استفاده شود. با این حال، در دنیای واقعی، دستیابی به کل مسیر هدف از بندر خروجی تا بندر مقصد دشوار است. بنابراین، ما نمی توانیم به طور مستقیم اطلاعات بندر مبدأ و بندر مقصد را بدست آوریم. با این حال، فواصل از نقطه مسیر تا هر بندر اصلی به راحتی قابل دستیابی است. با محاسبه فاصله بین هر نقطه مسیر و هر بندر اصلی،
که در آن m نشان دهنده تعداد پورت ها و n نشان دهنده تعداد نقاط یک مسیر است. در مسیر کشتیرانی، فاصله بین کشتی و بندر مبدا افزایش می یابد و فاصله کشتی و بندر مقصد کاهش می یابد که در ماتریس فاصله منعکس می شود. به عنوان مثال، فرض می کنیم که پورت مقصد پورت ۱ و پورت مقصد پورت ۲ است. سپس، ستون اول dpبه طور کلی روند افزایشی و ستون دوم به طور کلی روند کاهشی را نشان می دهد. اطلاعات پورت خروجی و پورت مقصد هدف به یک ماتریس تبدیل میشود که نه تنها اطلاعات را به دادههای استاندارد تبدیل میکند، بلکه مشکلی را نیز حل میکند که در آن دسترسی مستقیم بندر مقصد و پورت مقصد دشوار است. در این مقاله، ماتریس فاصله dp به عنوان سومین نوع اطلاعات زمینه در نظر گرفته شده است، و توانایی یادگیری پایان به پایان یادگیری عمیق برای استخراج خودکار ویژگیها برای تشخیص انواع مختلف اهداف مورد استفاده قرار میگیرد.
۴٫۳٫ مدل شبکه عصبی
شکل ۳ ساختار مدل شبکه عصبی را نشان می دهد. این شامل سه ماژول است: یک ماژول ورودی داده، یک ماژول استخراج و ترکیب ویژگی، و یک ماژول طبقه بندی. اطلاعات مسیر و اطلاعات زمینه ویژگی های مختلف هدف را به تصویر می کشد. ایده اصلی ترکیب دو نوع اطلاعات، به دست آوردن اطلاعات ترکیب شده و استفاده از اطلاعات ترکیب شده برای شناسایی هدف است. ادغام اطلاعات یک مرحله حیاتی است. اطلاعات مسیر و اطلاعات زمینه انواع مختلفی دارند. بنابراین، ادغام مستقیم آنها دشوار است. روش یادگیری عمیق یک روش ترکیبی در سطح ویژگی را ارائه می دهد. یک مطالعه [ ۳۰] از دو شبکه برای استخراج ویژگیهای اطلاعات تصویر و اطلاعات متنی استفاده کرد و ویژگیها برای به دست آوردن نمایش ویژگی ترکیبی ترکیب شدند. مطالعه دیگری [ ۳۱] ابتدا ویژگی جهانی و ویژگی محلی تصاویر را استخراج کرد و سپس آنها را در فضای ویژگی ترکیب کرد. در تحقیق ما، با استفاده از شبکه استخراج ویژگی، اطلاعات مسیر و اطلاعات زمینه به فضای ویژگی تبدیل شده و بردار ویژگی به دست میآید. بردار ویژگی یک نمایش یکپارچه است. بردارهای ویژگی برای تحقق بخشیدن به ادغام دو نوع اطلاعات استفاده می شوند که ترکیب سطح ویژگی است. به طور خاص، ویژگی فیوژن با عملیات الحاق در فضای ویژگی به دست می آید. با آموزش مدل شبکه، در فضای ویژگی، ویژگی های همجوشی اهداف مختلف از یکدیگر دور بوده و ویژگی های همجوشی همان نوع اهداف برای دستیابی به طبقه بندی اهداف به یکدیگر نزدیک است. ابتدا، ماژول ورودی داده، داده های فرمت شده را می خواند. دومین، ماژول استخراج و ادغام ویژگی ویژگی های اطلاعات مسیر و اطلاعات زمینه را استخراج می کند و ویژگی های استخراج شده را برای به دست آوردن ویژگی های ذوب شده ترکیب می کند. در نهایت، لایه کاملاً متصل و لایه SoftMax طبقهبندی مسیر را تکمیل میکنند و دستهبندی هدف را خروجی میدهند. فرمت داده های ورودی استM × L × D ، که در آن M نشان دهنده تعداد نمونه ها در یک دسته در طول فرآیند آموزش است. L نشان دهنده طول یک نمونه مسیر است که تعداد نقاط یک مسیر است. D بعد هر نقطه مسیر است. شبکه عصبی ترانسفورماتور اولین بار توسط Vaswani A. و همکاران ارائه شد. در یک مطالعه [ ۳۲]. آنها از آن برای حل وظایف ترجمه ماشینی و درک پردازش داده های توالی استفاده کردند. الگوریتم توجه چند سر به صورت داخلی اعمال شد که مزایایی در استخراج ویژگیهای بالقوه داشت. توجه چند سر می تواند به طور موثر ویژگی های مهم مسیر را در نظر بگیرد، توجه به اطلاعات مفید را بهبود بخشد و اطلاعات نامربوط را سرکوب کند. بنابراین، بردارهای ویژگی استخراج شده تمایز بیشتری داشتند. اطلاعات زمینه ابعاد بزرگی دارد و قواعد تغییر آن به راحتی قابل درک و من است. یک LSTM [ ۳۳ ] برای استخراج اطلاعات ویژگی از اطلاعات زمینه استفاده شد. LSTM دارای تعداد کمی از پارامترهای ساختاری است و به راحتی همگرا می شود.
۵٫ آماده سازی داده ها
این مقاله دادههای سیستم شناسایی خودکار (AIS) یک منطقه دریایی خاص در اروپا را برای تجزیه و تحلیل و تأیید میپذیرد. ما یک پایگاه دانش زمینه ای در این زمینه ایجاد می کنیم. داده های AIS شامل اطلاعات موقعیت و حرکت است. انواع هدف نیز ثبت می شود که می تواند به عنوان برچسبی برای آموزش و آزمایش مدل شبکه عصبی ما تنظیم شود. مجموعه داده سیستم شناسایی خودکار اروپا (AIS) برای برنامه های کاربردی مرتبط با دریا تنظیم شده است. اطلاعات ناوبری کشتی ها به مدت شش ماه، از ۱ اکتبر ۲۰۱۵ تا ۳۱ مارس ۲۰۱۶، ثبت می شود. این مکان دریای سلتیک و خلیج بیسکای (فرانسه) را پوشش می دهد. این شامل بیش از ۱۹ میلیون رکورد AIS است. ۹ نوع کشتی اصلی از داده های AIS اروپایی انتخاب شده اند: ماهیگیری، عملیات نظامی، SAR (جستجو و نجات)، یدک کش، مسافر، بار، تانکر، کشتی تفریحی، و کشتی های دیگر. داده ها به یک مجموعه آموزشی و یک مجموعه تست تقسیم می شوند که ۸۰ درصد آن مجموعه آموزشی و ۲۰ درصد باقیمانده مجموعه تست است. هر نوع کشتی دارای ۸۶۴۰۰۰ رکورد AIS است. مدل شبکه توسط مجموعه آموزشی آموزش داده می شود و توانایی تشخیص مدل شبکه بر روی مجموعه تست آزمایش می شود.
۵٫۱٫ پیش پردازش داده های مسیر
داده های اصلی در AIS نامرتب هستند و حاوی اطلاعات اضافی هستند. ابتدا دادهها را بر اساس ترتیب نوع هدف، تعداد (شناسایی هویت خدمات سیار دریایی) و مهر زمانی مرتب میکنیم. سپس، اطلاعات اضافی حذف میشوند و فقط اطلاعات مُهر زمانی، طول جغرافیایی، طول جغرافیایی، سرعت، سرفصل و نوع هدف مسیر را باقی میگذارند. نوع هدف به یک مقدار برچسب تبدیل می شود و اعداد ۰-۸ به ترتیب نشان دهنده ۹ نوع هدف هستند.
۵٫۲٫ ساخت پایگاه دانش زمینه و محاسبه کمیت زمینه
ساخت یک پایگاه دانش زمینه برای محاسبه کمیت زمینه مربوط به مسیر آماده می شود. ساخت و ساز فرآیند استخراج پسزمینه مسیر است و محاسبه کمیت بافت متناظر هر مسیر، فرآیند کمیسازی پسزمینه زمینه است. کل مرحله تبدیل دانش پس زمینه زمینه کیفی را به داده های ورودی که می تواند به صورت کمی توسط مدل شبکه عصبی محاسبه شود، محقق می کند.
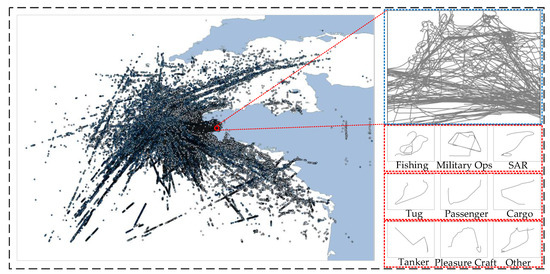
داده های AIS مورد استفاده در این آزمایش از دریای سلتیک و خلیج بیسکای (فرانسه) است ( شکل ۴ را ببینید ). در شکل ۴ قسمت سفید نمایانگر دریا، قسمت آبی نمایانگر خشکی و نقاط نمایانگر نقاط مسیر هستند. مسیرها در قسمت آبی از رودخانه ها و دریاچه های روی خشکی است. از آنجایی که این مطالعه فقط بر اهداف در ناحیه دریا متمرکز است، مسیرهای موجود در منطقه داخلی در پاکسازی دادههای بعدی و تولید نمونه مسیر حذف میشوند. نیمه سمت راست شکل ۴جزئیات جزئی بزرگ شده و مسیرهای حرکت انواع کشتی را نشان می دهد. ساخت پایگاه دانش زمینه در این منطقه دریایی را به عنوان مثال برای معرفی فرآیند ساخت دانش زمینه و نحوه محاسبه مقادیر زمینه از طریق پایگاه دانش معرفی می کنیم (لینک داده ها و شکل https://zenodo است. org/record/1167595/files/%5BP1%5D%20AIS%20Data.zip?download=1 .) (در ۱۶ اکتبر ۲۰۲۱ قابل دسترسی است).
۵٫۲٫۱٫ تراکم ترافیک دریایی ( td )
شبکه تراکم ترافیک دریایی با استفاده از داده های تاریخی AIS ساخته شده است و منطقه دریا به شبکه های مربع مساوی تقسیم می شود. نقشه در مجموع شامل ۱۰۰۰۰ شبکه با ۱۰۰ شبکه در هر ردیف و ۱۰۰ شبکه در هر ستون است. اندازه فیزیکی شبکه واحد است ۴٫۸“×۴٫۳۸“۴٫۸″×۴٫۳۸″. تراکم نقطه مسیر هر شبکه به عنوان تراکم ترافیک این شبکه محاسبه می شود تا نقشه شبکه تراکم ترافیک دریایی به دست آید. هر شبکه شامل دو ویژگی است: شماره شبکه و مقدار شبکه. شکل ۵ نمودار شبکه ای را نشان می دهد که پس از محاسبه ترسیم شده است. با افزایش مقدار شبکه، رنگ به تدریج از بنفش به زرد تغییر می کند، که به طور مستقیم تراکم ترافیک را در مکان های مختلف در این منطقه دریایی منعکس می کند. پس از ایجاد پایگاه دانش تراکم ترافیک دریایی، مقدار متن متناظر td را می توان برای نمونه مسیر محاسبه کرد. ابتدا، شماره شبکه i نقطه مسیر با توجه به اطلاعات طول و عرض جغرافیایی و مقدار شبکه جستجو می شود. تیدمنتیدمنبه دست آمده است. سپس تیدمنتیدمنبرای هر امتیاز به دست می آید. را t d = [ tد۱، تید۲، تید۳، ⋯ ، تیدn]تید=[تید۱،تید۲،تید۳،⋯،تید�]تشکیل می شود.
۵٫۲٫۲٫ فاصله از هدف تا ساحل ( ds )
خط ساحلی واقعی بسیار پرپیچ و خم است و می توان آن را ترکیبی نامنظم از چند ضلعی های محدب و چند ضلعی های مقعر در نظر گرفت. محاسبه فاصله دقیق از هدف تا ساحل دشوار است. این کار نیازی به بدست آوردن فاصله دقیق ندارد. دانش زمینه فقط باید منعکس کند که هدف نزدیک یا دور از ساحل است. بر این اساس، یک روش محاسبه فاصله تقریبی کلی در این مقاله پیشنهاد شده است که می تواند در ساخت پایگاه های دانش زمینه در مناطق مختلف مورد استفاده قرار گیرد. ابتدا نقاطی را در امتداد خط ساحلی در فواصل زمانی مشخص می کنیم. فاصله نقاط نشانگر به فاصله بین داده های مسیر تاریخی و ساحل بستگی دارد. اگر آنها به طور کلی از ساحل دور باشند، فاصله نقاط نشانگر افزایش می یابد. در غیر این صورت کاهش می یابد. بعد از اینکه کل خط ساحلی مشخص شد،شکل ۶ نشانگرها (نقاط سفید) در خط ساحلی را نشان می دهد. ما فاصله بین هدف و هر نقطه نشانگر را محاسبه می کنیم. حداقل فاصله، فاصله تقریبی بین هدف و خط ساحلی است. کار علامت گذاری فرآیند ایجاد پایگاه دانش است. فرآیند محاسبه فاصله تقریبی با توجه به نقاط نشانگر فرآیند به دست آوردن است d s = [ dس۱، دس۲، دس۳، ⋯ ، دسn]دس=[دس۱،دس۲،دس۳،⋯،دس�].
۵٫۲٫۳٫ فاصله از هدف تا بنادر
ابتدا بنادر اصلی در امتداد ساحل را انتخاب کرده و طول و عرض جغرافیایی آنها را ثبت می کنیم. سپس فاصله بین هدف و هر بندر با طول و عرض جغرافیایی محاسبه می شود. اولین گام، فرآیند ایجاد پایگاه دانش فواصل از هدف تا بندر است. مرحله دوم فرآیند به دست آوردن dp است. در این آزمایش پارامترهای n و mبه ترتیب ۳۰ و ۲۰ هستند. از آنجایی که وظیفه شناسایی معمولاً بر روی کشتیها در قسمت خاصی از اقیانوس متمرکز است، تعداد بنادر زیاد نیست. با این حال، پورت مبدا یا مقصد ممکن است خارج از بخش نقشه باشد. در این نوع سناریو، پورت های انتخاب شده نمی توانند چنین اطلاعات زمینه جامعی را ارائه دهند. اطلاعات زمینه نوعی اطلاعات کمکی برای افزایش اطلاعات مسیر است که هدف از آن بهبود توانایی تشخیص اهداف است. نمی توان از آن به عنوان اطلاعات شناسایی اولیه استفاده کرد. در واقع، هرچه اطلاعات زمینه جامع تر باشد، برای بهبود توانایی تشخیص مفیدتر است. با این حال، فقدان اطلاعات موقعیتی جامع باعث نمی شود که مدل نتواند همگرا شود زیرا اطلاعات مسیر موقعیت غالب را اشغال می کند. با این حال، فقدان اطلاعات موقعیتی جامع می تواند بهبود توانایی تشخیص را محدود کند. چگونگی به دست آوردن اطلاعات جامع تر ارزش تحقیق بیشتر را دارد.
۵٫۳٫ عادی سازی
شبکه های عصبی در طول آموزش به مقادیر منفرد و توزیع های مختلف ابعاد داده بسیار حساس هستند. برای جلوگیری از چنین اثرات نامطلوبی، نرمال سازی ۰-۱ برای عادی سازی داده ها استفاده می شود:
که در آن x یک بعد از نقطه j در مسیر i را نشان می دهد. ایکسحداکثر=حداکثرi ∈ [ ۱ , m ] , j ∈ [ ۱ , n ]ایکسمن جایکسحداکثر=حداکثرمن∈[۱،متر]،�∈[۱،�]ایکسمن�، ایکسدقیقه=دقیقهi ∈ [ ۱ , m ] , j ∈ [ ۱ , n ]ایکسمن جایکسدقیقه=دقیقهمن∈[۱،متر]،�∈[۱،�]ایکسمن�. به طور خاص، تمام داده هایی که به مدل شبکه تغذیه می شوند، نرمال می شوند. مقادیر حداکثر و حداقل در فرمول (۹) از داده های مشاهده شده بدست آمده است. با این حال، علاوه بر داده های مشاهده شده در این آزمایش، مقادیر بزرگتر یا کوچکتر ممکن است ظاهر شود. در این حالت، مقادیر حداکثر و حداقل در فرمول (۹) باید مشاهدات جدید را در هنگام منظم کردن داده های جدید شامل شود.
۶٫ آزمایش ها و بحث
در این بخش، دو گروه آزمایش برای بررسی اثربخشی بهبود زمینه، برتری مدل نسبت به سایر الگوریتمها و توانایی ضد نویز طراحی شدهاند. مجموعه داده ساخته شده در بخش ۵ برای آزمایش ها استفاده می شود. همه آزمایشها تحت چارچوب یادگیری عمیق PyTorch بر روی یک ایستگاه ۶۴ بیتی با Ubuntu 20.04.2، ۱۶ گیگابایت رم، ۸ پردازنده Intel(R) Core (TM) i7-9700 و NVIDIA RTX 2080Ti اجرا میشوند.
۶٫۱٫ اعتبار سنجی بهبود زمینه
در این گروه از آزمایشها، اثربخشی بهبود زمینه تأیید میشود. دقت به عنوان شاخص تجربی انتخاب شده است. سه آزمایش فرعی برای مقایسه تنظیم شده است. داده های ورودی سه آزمایش فرعی عبارتند از اطلاعات مسیر بدون بهبود زمینه، اطلاعات مسیر پس از بهبود زمینه، و فقط اطلاعات زمینه. سه آزمایش فرعی شماره I، II و III هستند. دقت آزمایش I و آزمایش II در مجموعه داده آزمایشی به ترتیب ۸۹٫۳۲٪ و ۹۷٫۱۳٪ است. شکل ۷a,b ماتریس های سردرگمی نتایج را نشان می دهد. با مقایسه آزمایش I و آزمایش II، دقت تشخیص پس از بهبود زمینه ۷٫۹۱٪ افزایش می یابد. نتایج نشان می دهد که توانایی تشخیص هدف را می توان با افزایش اطلاعات زمینه مسیر بهبود بخشید. علاوه بر این، برای اثبات اثربخشی ادغام ویژگیهای مسیر و ویژگیهای زمینه، آزمایش III را تنظیم کردیم. دقت آزمایش III 48.85٪ است. شکل ۷c ماتریس سردرگمی را نشان می دهد. سپس، نمونه های مسیر را در آزمایش شماره گذاری می کنیم. شمارههای نمونهای را که در آزمایش اول به درستی شناسایی شده و نادرست شناسایی شدهاند را ذخیره میکنیم. برای آزمایش III نیز همین کار را انجام میدهیم. با توجه به تجزیه و تحلیل اعداد ثبت شده در بالا، برای آزمایش I، نسبت نمونه های اشتباه شناسایی شده ۱۰٫۶۸٪ است. در مجموع ۳۵٫۴۵ درصد از نمونه های اشتباه شناسایی شده در آزمایش I به درستی در آزمایش III شناسایی شده اند که ۳٫۷۹ درصد از تعداد کل نمونه ها را تشکیل می دهد. این نشان می دهد که در فرآیند شناسایی هدف، اطلاعات زمینه تا حد معینی مکمل اطلاعات مسیر است. ویژگیهای استخراجشده از اطلاعات زمینه را میتوان با ویژگیهای مسیر ترکیب کرد تا ویژگیهای ترکیبی متمایزتر شود. شکل ۸تجسم نتایج تشخیص محلی را نشان می دهد.
۶٫۲٫ آزمایش های کنتراست
در این بخش، روش پیشنهادی با روش های موجود در ادبیات [ ۱۱ ، ۱۲ ، ۳۴ ، ۳۵ ] مقایسه شده است. این روشها برای شناسایی اهداف کشتی در مجموعه دادههای AIS مورد استفاده در این مقاله بازتولید میشوند. فراخوان وزنی، دقت وزنی و امتیاز F1 وزنی به عنوان شاخص های ارزیابی انتخاب می شوند. فراخوان، دقت و امتیاز F1 شاخص هایی هستند که برای ارزیابی طبقه بندی باینری استفاده می شوند. با تخصیص وزن به مقادیر آنها می توان طبقه بندی های متعددی را ارزیابی کرد. وزن نسبت تعداد هر دسته است. نتایج تجربی در جدول ۱نشان می دهد که توانایی تشخیص روش پیشنهادی از روش های موجود بیشتر است. آنها اهداف کشتی را تنها با استفاده از اطلاعات مسیر شناسایی می کنند. روش شبکه عصبی ترانسفورماتور بیزی (BTNN) پیشنهاد شده در یک مطالعه [ ۳۵ ] در تشخیص هدف به خوبی عمل می کند. با این حال، زمانی که تعداد نمونهها در مجموعه داده کاهش مییابد، توانایی تشخیص BTNN کاهش مییابد که یک مشکل رایج برای یادگیری عمیق است. در این مطالعه [ ۳۵]، ۲۱۲۵۰۸ مسیر در مجموعه داده وجود داشت در حالی که ۲۸۸۰۰ در این تحقیق استفاده شد. با افزایش اطلاعات مسیر با دانش زمینه، روش پیشنهادی بهتر از سایر روشها عمل کرد. این بیشتر اثربخشی افزایش اطلاعات مسیر و اثربخشی شبکه فیوژن ویژگی را ثابت می کند. روش بهبود زمینه همچنین راه حلی برای غلبه بر مشکل تخریب قابلیت یادگیری عمیق ناشی از کاهش اندازه مجموعه داده ارائه می دهد. مدل شبکه در این مقاله یک ترانسفورماتور و شبکه LSTM را برای استخراج ویژگیهای مسیر و ویژگیهای زمینه به ترتیب اتخاذ میکند و سپس ویژگیهای همجوشی شناسایی میشوند. مدل می تواند از دو نوع اطلاعات استفاده کند و ویژگی های استخراج شده بیشتر متمایز هستند.
در دنیای واقعی، سر و صدا در همه جا وجود دارد. داده های مسیر جمع آوری شده توسط سنسورهای مختلف نیز سطوح مختلفی از نویز دارند. برای تأیید توانایی تشخیص روش پیشنهادی در سطوح مختلف نویز، نویز گاوسی به دادههای ورودی در این آزمایش اضافه میشود. به طور خاص، دادههای نویز به عرض جغرافیایی ( lat )، طول جغرافیایی ( lon )، سرعت روی زمین ( sog )، مسیر روی زمین ( cog )، و مهر زمانی ( t ) در دادههای مسیر اضافه میشوند. داده های نویز با تنظیم میانگین و استاندارد ماتریس تولید می شوند. مقدار متوسط نویز گاوسی ۰ و انحراف استاندارد f است ∈∈[۰٫۰۵، ۰٫۰۸، ۰٫۱۰، ۰٫۱۳، ۰٫۱۵، ۰٫۱۸، ۰٫۲۰، ۰٫۲۳، ۰٫۲۵، ۰٫۲۸، ۰٫۳۰]. شکل ۹ منحنی های دقت چهار روش را نشان می دهد که با f تغییر می کنند. با افزایش f ، دقت تشخیص چهار روش روند نزولی را نشان می دهد. با این حال، دقت تشخیص روش ما همیشه بالاتر از روش های دیگر در سطوح مختلف نویز است. وقتی f به ۰٫۳۰ افزایش می یابد، دقت تشخیص روش ما ۰٫۸۶۳۱ است که سطح بالایی را حفظ می کند. این نشان می دهد که روش ما توانایی تشخیص قوی در یک محیط پر سر و صدا دارد.
۶٫۳٫ اعتبار سنجی در سایر مجموعه داده های منطقه دریایی
برای نشان دادن کلیت روش پیشنهادی، این روش در منطقه دریایی دیگری در نزدیکی ساحل شرقی آمریکای شمالی اعمال میشود. در این منطقه، شدت ترافیک کمتر از منطقه ای است که داده های استفاده شده قبلی از آن می باشد. چهار نوع کشتی اصلی از دادههای AIS انتخاب شدهاند: ماهیگیری، کشتی تفریحی، مسافری و کشتیهای باری. شکل ۱۰ نمودار شبکه ای را نشان می دهد. شکل ۱۱علائم روی خط ساحلی را نشان می دهد. دو گروه آزمایش تنظیم شده است. آزمایش های گروه اول فقط هدف را با اطلاعات مسیر و گروه دیگر هدف را با اطلاعات مسیر و زمینه تشخیص می دهند. دقت گروه اول ۶۱/۷۹ درصد و گروه دیگر ۳۴/۸۷ درصد است. با افزایش مسیر با اطلاعات زمینه، دقت ۷٫۷۳٪ افزایش می یابد. نتایج نشان می دهد که روش پیشنهادی در سناریوهای مختلف کلی است.
۷٫ نتیجه گیری
در این مقاله، ما روشی را برای تشخیص هدف کشتی بر اساس مسیرهای توسعه یافته زمینه پیشنهاد می کنیم. با ساختن یک پایگاه دانش زمینه، اطلاعات مسیر را می توان به صورت متنی افزایش داد تا مسیر را متمایزتر کند. ما از مدل یادگیری عمیق برای استخراج خودکار ویژگی مسیر و ویژگی زمینه استفاده می کنیم. سپس، ویژگی ها برای به دست آوردن یک ویژگی جامع ترکیب می شوند. از ویژگی ذوب شده برای شناسایی اهداف کشتی استفاده می شود. آموزش آفلاین و تشخیص آنلاین برای تکمیل کار شناسایی اتخاذ شده است. دادههای AIS برای تأیید استفاده میشوند و نتایج نشان میدهد که روش پیشنهادی دارای دقت تشخیص بالا و توانایی ضد نویز قوی است. روش بهبود زمینه می تواند توانایی تشخیص را بهبود بخشد.
در این مطالعه محدودیت هایی نیز وجود دارد. ساخت یک پایگاه دانش زمینه پیچیده است. به عنوان مثال تعداد نشانگرهایی که در ساحل انتخاب می شوند زیاد است و کار انتخاب تا حدودی دشوار است. عدم قطعیت انتخاب نشانگر و محاسبه تقریبی فاصله تا ساحل منجر به انحراف استخراج اطلاعات زمینه می شود. علاوه بر این، وظیفه شناسایی بر روی یک قسمت از اقیانوس متمرکز است، در حالی که مبدا یا بندر مقصد ممکن است خارج از بخش نقشه باشد. اطلاعات زمینه فواصل از هدف تا پورت ممکن است جامع نباشد. اگرچه انحراف در اطلاعات زمینه منجر به شکست کار شناسایی نمی شود، اما بهبود توانایی تشخیص را محدود می کند. در کارهای آینده، باید به دقت ساخت اطلاعات زمینه توجه بیشتری شود. علاوه بر این، اطلاعات زمینه بیشتری باید استخراج شود. این تحقیق سعی دارد اطلاعات زمینه را با اطلاعات مسیر برای شناسایی اهداف کشتی ترکیب کند. نتایج تجربی اثربخشی این عملیات را نشان می دهد. بنابراین در کارهای آتی می توان اطلاعات زمینه غنی تر و عمیق تری را برای استخراج در نظر گرفت.