۱٫ معرفی
مهاجرت گسترده روستا به شهر، روند شهرنشینی و صنعتی شدن در چین را در چند دهه اخیر تسریع کرده است. از سال ۲۰۰۰ تا ۲۰۱۶، جمعیت ساکن روستایی چین از ۸۰۸ میلیون نفر به ۵۸۹ میلیون نفر کاهش یافته است که کاهش ۲۷٫۱ درصدی را نشان می دهد [ ۱ ]. با این حال، مساحت زیر خانههای روستایی به جای کاهش، افزایش یافته است، زیرا کشاورزان تازه اخراج شده ترجیح میدهند خانههای روستایی را حفظ کنند [ ۲ ، ۳ ، ۴ ]. از ۱۴٫۵ به ۱۹٫۹ میلیون هکتار افزایش یافته است که به افزایش ۳۷٫۲ درصدی تبدیل شده است [ ۱ ]]. تعداد زیادی از کشاورزان خانه های خود را به عنوان ثروت موروثی و نه فقط به عنوان زمین برای ساخت و ساز رفتار می کنند. در عین حال، زمانی که کشاورزان در شهرها مستقر می شوند، انتقال زمین های مسکونی به دیگران محدود می شود [ ۵ ]. چالش های زیادی در مورد استفاده و مدیریت اراضی روستایی وجود دارد. از یک طرف، یک خانه روستایی به عنوان امنیت مسکن برای کشاورز عمل می کند [ ۶ ]. از سوی دیگر، این احساس امنیت باعث پدید آمدن پدیدههای غیرمنطقی مانند اشغال بیش از حد زمین، بلااستفاده ماندن زمین و استفاده ناکافی از زمین شده است .]. برای ارتقای توسعه روستایی، پیشنهاد دولت چین برای ساخت روستاهای زیبا بر تهیه طرحهای روستایی با توجه به شرایط محلی، بررسیهای عمیق کشاورزان، طرحبندی منطقی و حفاظت از زمین متمرکز است. استفاده و مدیریت خانهها بخش کلیدی این تمرین است، و بنابراین، دادههای اضافی و بررسیهای میدانی برای آنهایی که در حال حاضر در دسترس هستند مورد نیاز است. نقشه برداری خانگی یک روش متداول برای جمع آوری اطلاعات اجتماعی-اقتصادی و موضوعی مربوطه است، با مناطق مسکونی و زمینی که هسته اصلی این اطلاعات را تشکیل می دهند [ ۸ ]. با این حال، بخش کوچکی از کشاورزان اغلب انگیزه ای برای ارائه نادرست داده ها برای دریافت یارانه های دولتی بالاتر یا اجتناب از افشای زمین های بیش از حد اشغال شده دارند [ ۹ ]]. علاوه بر این، بیشتر روستاهای چین پرجمعیت با خانههای مسکونی هستند که نیاز به بررسیهای گسترده و زمانبر دارند. بنابراین، رویکردهای اضافی برای جمعآوری دادههای مکانی دقیقتر برای نظارت صحیح بر وضعیت خانههای روستایی مورد نیاز است.
استفاده از وسایل نقلیه هوایی بدون سرنشین (پهپادها) فرصت های جدیدی را برای نظارت بر خانه های روستایی ارائه می دهد، زیرا آنها جمع آوری داده ها در زمان واقعی و با وضوح بالا را تسهیل می کنند [ ۱۰ ]. با توجه به وضوح سانتی متری بافت زمین، تصاویر پهپاد برای تفسیر بصری خانه های روستایی مفید هستند [ ۱۱ ]. یانگ و همکاران اندازه گیری تراکم ساختمان و نسبت مساحت سکونتگاه های روستایی با استفاده از پهپاد داجیانگ با تفسیر بصری [ ۱۲ ]]. با این حال، تفسیر بصری برای حمایت از بررسیهای روستایی در چین، که معمولاً هزاران روستا را پوشش میدهند، کافی نیست. ارتفاع یک ساختمان ممکن است به روش های مختلف با استفاده از تصاویر پهپاد تشخیص داده شود. لی و همکاران روشی برای تخمین ارتفاع ساختمان با استفاده از داده های نگهبان-۱، که بر مقیاس شهری متمرکز بود، پیشنهاد کرد [ ۱۳ ]. وانگ و همکاران یک ساختمان سه بعدی بر اساس عکاسی شیب دار پهپاد [ ۱۴ ] بازسازی کرد ، که برای جوامع متراکم روستایی مناسب نیست زیرا محاسبات آنها بر اساس یک ساختمان واحد بود.
در سال های اخیر از روش های یادگیری عمیق نیز برای شناسایی ساختمان های روستایی استفاده شده است [ ۱۵ ]. لی و همکاران از AlexNet و الگوریتمهای ماشین بردار پشتیبانی میکند تا ساختمانهای روستای توخالی را بر اساس تصاویر سنجش از دور با وضوح بالا شناسایی کنند [ ۱۶ ]. این رویکردها مبتنی بر روشهای تشخیص شی [ ۱۷ ] هستند که وظیفه اصلی آنها یافتن تمام اشیاء مورد علاقه در تصویر و تعیین مکان آنها است [ ۱۸ ]. تکنیکهای تشخیص اشیا از قابهای مستطیلی برای تعیین مکان اشیا استفاده میکنند، اما هم توزیع سقف و هم شکل سقف ساختمانهای روستایی نامنظم است. بنابراین، دقت شناسایی این روش ها محدود است [ ۱۹]. علاوه بر این، در کار شناسایی خانه، خروجی مورد نظر باید شامل مرزهای ساختمان خانه باشد، و به هر پیکسل باید یک برچسب کلاس اختصاص داده شود [ ۲۰ ]. فناوری مبتنی بر پیکسل نشان میدهد که شبکه یاد میگیرد برای هر پیکسل پیشبینی کند [ ۲۱ ]. U-net یک رمزگذار خودکار کانولوشن است که به طور گسترده در زمینه پزشکی و سایر صنایع استفاده می شود. تقسیم بندی مبتنی بر پیکسل با دقت بالایی روی تصاویر انجام می دهد [ ۲۰ ]. با این حال، استفاده از U-net برای شناسایی خانه های روستایی هنوز غیر معمول است.
در تخمین زمینهای مسکونی و ساختمانها در سطح روستا، کشف روشی قابل اجرا در روستاهای چین برای دستیابی به تصویر برداری بلادرنگ، شناسایی مبتنی بر پیکسل و مدلسازی سهبعدی برای ساختمانهای روستایی، هنوز یک چالش است. که یک جایگزین بالقوه برای نظرسنجیهای وقتگیر و پر زحمت خانوار ارائه میکند. در این مطالعه، اهداف عبارت بودند از: (۱) استخراج توزیع فضایی خانهها از تصاویر پهپاد، عمدتاً با تکیه بر طبقهبندی تصویر مبتنی بر پیکسل با استفاده از الگوریتم U-net. (۲) توسعه و اعتبارسنجی یک مدل ارتفاع ساختمان (BHM) برای تعیین تعداد طبقات و مساحت طبقه ساختمانهای روستایی بر اساس مدلسازی سه بعدی. و (۳) توسعه و آزمایش روشی در سطح روستا برای تخمین مساحت خانه و زمین به روشی سریع و کم هزینه،
۲٫ داده ها و روش ها
۲٫۱٫ منطقه مطالعه
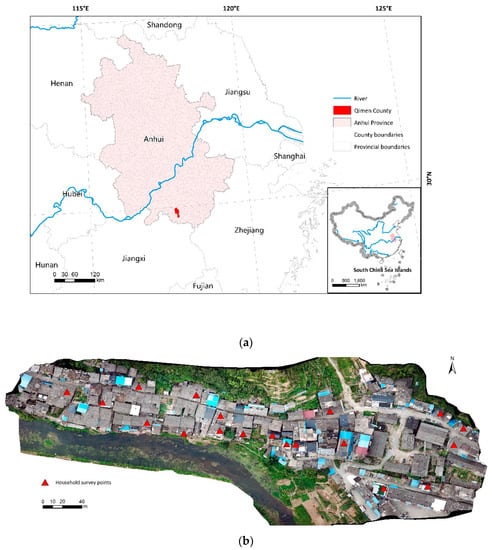
منطقه مورد مطالعه در روستای Jianfeng، شرق شهر Qishan، شهرستان Qimen، در استان آنهویی چین است ( شکل ۱ a). آنهویی یکی از اولین دسته ای از استان های چین است که به طور آزمایشی اصلاحات سیستم حقوق مالکیت جمعی روستایی را اجرا می کند. خانه های روستایی هسته اصلی گام بعدی اصلاحات و توسعه روستایی را تشکیل می دهند. شهرستان قیمن کوهستانی است. مساحت منطقه بررسی ۵۲۵۷۸٫۱۲ متر مربع است و در کل یک نوار باریک از زمین است که در شمال آن کوهستانی و در جنوب آن یک کانال رودخانه قرار دارد. در مجموع ۱۹ سایت بررسی خانوار در روستا وجود دارد. سوابقی برای اندازه خانهها و تعداد طبقات و مساحت ساختمانهای روستایی وجود دارد ( شکل ۱ ب).
۲٫۲٫ دریافت تصویر با استفاده از داده های پهپاد
برای به دست آوردن تصاویر پهپاد، از پهپاد DJI Mavic Pro استفاده کردیم که یک کوادکوپتر با موتور چهار چرخ متحرک و یک دوربین مکمل نیمه هادی اکسید فلزی (CMOS) با فاصله کانونی ۲۸ میلی متر و تعداد پیکسل موثر ۱۲٫۳۵ میلیون است. برای CMOS 1 اینچی. حداکثر سرعت و زمان پرواز به ترتیب ۱۸ متر بر ثانیه و ۲۷ دقیقه بود. دادههای پهپاد در ۱۶ آگوست ۲۰۱۹ بهدست آمدند. یک روز خشک و بدون باد برای جلوگیری از هرگونه اعوجاج ناشی از موجهای دوربین پهپاد انتخاب شد. برنامه ریزی پرواز خودگردان برای منطقه مورد مطالعه انجام شد. مسیر پرواز در جهت شمال به جنوب بود و به دو پرواز تقریباً ۱۲ دقیقه ای با سرعت ۱۱ متر بر ثانیه تقسیم شد. این دوربین دارای F-shift 2.2 و سرعت شاتر ۱/۲۰۰۰ ثانیه است. مقدار ISO، که می تواند به طور خودکار با توجه به شرایط نور تنظیم شود، بین ۱۰۰ و ۱۶۰۰ تنظیم شده بود. در طول گرفتن تصویر پهپاد، زاویه دوربین ۹۰- درجه بود و حالت ایمن روشن شد. این سنسور تصاویر ۲۰ مگاپیکسلی در طول موج های قرمز، سبز و آبی (RGB) تولید می کند. در طول پرواز، دوربین به طور خودکار هر ۷ متر رها می شد، در حالی که موقعیت دستگاه به طور همزمان توسط سیستم موقعیت یابی ماهواره ای دو حالته GPS/GLONASS داخلی ثبت می شد. در منطقه مورد مطالعه، طول پرواز از ۱۱۷°۴۲’۵۷٫۶۰″ شرقی تا ۱۱۷°۴۳’۱۲٫۰۰″ شرقی و عرض جغرافیایی پرواز از ۲۹°۵۱’۰۷٫۲۰″ شمالی تا ۲۹°۵۱’۱۰٫۸۰″ شمالی بود. از ارتفاع ۱۰۰٫۴ متری با ۷۰٪ همپوشانی جانبی، ۹۰٪ همپوشانی رو به جلو، و فاصله نمونه زمین نوری ۳٫۱ سانتی متر به دست آمده است. اندازه پیکسل تصاویر ۲٫۷ سانتی متر بود. مساحت پرواز تحت پوشش ۵۲۵۷۸٫۱۲ متر بود زاویه دوربین ۹۰- درجه بود و حالت ایمن روشن شد. این سنسور تصاویر ۲۰ مگاپیکسلی در طول موج های قرمز، سبز و آبی (RGB) تولید می کند. در طول پرواز، دوربین به طور خودکار هر ۷ متر رها می شد، در حالی که موقعیت دستگاه به طور همزمان توسط سیستم موقعیت یابی ماهواره ای دو حالته GPS/GLONASS داخلی ثبت می شد. در منطقه مورد مطالعه، طول پرواز از ۱۱۷°۴۲’۵۷٫۶۰″ شرقی تا ۱۱۷°۴۳’۱۲٫۰۰″ شرقی و عرض جغرافیایی پرواز از ۲۹°۵۱’۰۷٫۲۰″ شمالی تا ۲۹°۵۱’۱۰٫۸۰″ شمالی بود. از ارتفاع ۱۰۰٫۴ متری با ۷۰٪ همپوشانی جانبی، ۹۰٪ همپوشانی رو به جلو، و فاصله نمونه زمین نوری ۳٫۱ سانتی متر به دست آمده است. اندازه پیکسل تصاویر ۲٫۷ سانتی متر بود. مساحت پرواز تحت پوشش ۵۲۵۷۸٫۱۲ متر بود زاویه دوربین ۹۰- درجه بود و حالت ایمن روشن شد. این سنسور تصاویر ۲۰ مگاپیکسلی در طول موج های قرمز، سبز و آبی (RGB) تولید می کند. در طول پرواز، دوربین به طور خودکار هر ۷ متر رها می شد، در حالی که موقعیت دستگاه به طور همزمان توسط سیستم موقعیت یابی ماهواره ای دو حالته GPS/GLONASS داخلی ثبت می شد. در منطقه مورد مطالعه، طول پرواز از ۱۱۷°۴۲’۵۷٫۶۰″ شرقی تا ۱۱۷°۴۳’۱۲٫۰۰″ شرقی و عرض جغرافیایی پرواز از ۲۹°۵۱’۰۷٫۲۰″ شمالی تا ۲۹°۵۱’۱۰٫۸۰″ شمالی بود. از ارتفاع ۱۰۰٫۴ متری با ۷۰٪ همپوشانی جانبی، ۹۰٪ همپوشانی رو به جلو، و فاصله نمونه زمین نوری ۳٫۱ سانتی متر به دست آمده است. اندازه پیکسل تصاویر ۲٫۷ سانتی متر بود. مساحت پرواز تحت پوشش ۵۲۵۷۸٫۱۲ متر بود و طول موج های آبی (RGB). در طول پرواز، دوربین به طور خودکار هر ۷ متر رها می شد، در حالی که موقعیت دستگاه به طور همزمان توسط سیستم موقعیت یابی ماهواره ای دو حالته GPS/GLONASS داخلی ثبت می شد. در منطقه مورد مطالعه، طول پرواز از ۱۱۷°۴۲’۵۷٫۶۰″ شرقی تا ۱۱۷°۴۳’۱۲٫۰۰″ شرقی و عرض جغرافیایی پرواز از ۲۹°۵۱’۰۷٫۲۰″ شمالی تا ۲۹°۵۱’۱۰٫۸۰″ شمالی بود. از ارتفاع ۱۰۰٫۴ متری با ۷۰٪ همپوشانی جانبی، ۹۰٪ همپوشانی رو به جلو، و فاصله نمونه زمین نوری ۳٫۱ سانتی متر به دست آمده است. اندازه پیکسل تصاویر ۲٫۷ سانتی متر بود. مساحت پرواز تحت پوشش ۵۲۵۷۸٫۱۲ متر بود و طول موج های آبی (RGB). در طول پرواز، دوربین به طور خودکار هر ۷ متر رها می شد، در حالی که موقعیت دستگاه به طور همزمان توسط سیستم موقعیت یابی ماهواره ای دو حالته GPS/GLONASS داخلی ثبت می شد. در منطقه مورد مطالعه، طول پرواز از ۱۱۷°۴۲’۵۷٫۶۰″ شرقی تا ۱۱۷°۴۳’۱۲٫۰۰″ شرقی و عرض جغرافیایی پرواز از ۲۹°۵۱’۰۷٫۲۰″ شمالی تا ۲۹°۵۱’۱۰٫۸۰″ شمالی بود. از ارتفاع ۱۰۰٫۴ متری با ۷۰٪ همپوشانی جانبی، ۹۰٪ همپوشانی رو به جلو، و فاصله نمونه زمین نوری ۳٫۱ سانتی متر به دست آمده است. اندازه پیکسل تصاویر ۲٫۷ سانتی متر بود. مساحت پرواز تحت پوشش ۵۲۵۷۸٫۱۲ متر بود طول پرواز از ۱۱۷°۴۲’۵۷٫۶۰″ شرقی تا ۱۱۷°۴۳’۱۲٫۰۰″ شرقی و عرض جغرافیایی پرواز از ۲۹°۵۱’۰۷٫۲۰″ شمالی تا ۲۹°۵۱’۱۰٫۸۰″ شمالی بود. تصاویر از ارتفاع به دست آمده اند. ۱۰۰٫۴ متر با ۷۰٪ همپوشانی جانبی، ۹۰٪ همپوشانی رو به جلو، و فاصله نمونه زمین نوری ۳٫۱ سانتی متر. اندازه پیکسل تصاویر ۲٫۷ سانتی متر بود. مساحت پرواز تحت پوشش ۵۲۵۷۸٫۱۲ متر بود طول پرواز از ۱۱۷°۴۲’۵۷٫۶۰″ شرقی تا ۱۱۷°۴۳’۱۲٫۰۰″ شرقی و عرض جغرافیایی پرواز از ۲۹°۵۱’۰۷٫۲۰″ شمالی تا ۲۹°۵۱’۱۰٫۸۰″ شمالی بود. تصاویر از ارتفاع به دست آمده اند. ۱۰۰٫۴ متر با ۷۰٪ همپوشانی جانبی، ۹۰٪ همپوشانی رو به جلو، و فاصله نمونه زمین نوری ۳٫۱ سانتی متر. اندازه پیکسل تصاویر ۲٫۷ سانتی متر بود. مساحت پرواز تحت پوشش ۵۲۵۷۸٫۱۲ متر بود۲ . در مجموع ۱۳۰ تصویر RGB در طول بررسی به دست آمد.
۲٫۳٫ برآورد مساحت اراضی روستایی با استفاده از الگوریتم U-Net
۲٫۳٫۱٫ معماری U-Net و تنظیمات پارامتر
معماری U-net در شکل ۲ نشان داده شده است ، به دنبال نمودار معادل توسعه یافته توسط Ronneberger و همکاران. [ ۲۰ ]. معماری U-Net از دو بخش تشکیل شده است: مسیر انقباض و مسیر گسترش. مسیر انقباض از یک معماری شبکه کانولوشنال معمولی پیروی می کند، با کانال های ویژگی بسیاری که به شبکه اجازه می دهد اطلاعات زمینه را به لایه های با وضوح بالاتر منتشر کند.
U-net در این مطالعه از لایه های کانولوشن با اندازه هسته کانولوشن ۳×۳ تشکیل شده است و به دنبال آن یک واحد خطی یکسو کننده (ReLU) قرار دارد. برای دستیابی به یک روش آموزشی از نظر عددی پایدار، یک لایه نرمال سازی دسته ای (BN) بعد از هر لایه پیچشی گنجانده شد. سپس، ۲ × ۲ مرحله از ۲ لایه حداکثر ادغام برای تکمیل نمونه برداری پایین دنبال شد، در حالی که اندازه نقشه ویژگی کاهش یافت. کانالهای ویژگی در هر مرحله پاییننمونهسازی به ترتیب دو افزایش یافتند و کانالهای ویژگی در هر مرحله نمونهبرداری به نصف کاهش یافتند. برای کنترل اندازه فضایی حجمهای خروجی، از فراپارامتر همان بالشتک استفاده شد. در لایه نهایی، یک لایه کانولوشن با اندازه هسته کانولوشن ۱ × ۱ نقشه ویژگی ۳۲ کانال را به تعداد مورد نیاز دسته بندی کرد. با استفاده از یک تابع سیگموئید به عنوان تابع فعال سازی عصبی. این شبکه در مجموع ۲۳ لایه داشت.
۲٫۳٫۲٫ آموزش
در اینجا مجموعاً ۱۸۸ نمونه تصویر RGB در ابعاد ۶۵۰ × ۶۵۰ پیکسل بر اساس داده های پهپاد تهیه شد. خانهها و سایر ویژگیها در منطقه مورد مطالعه به صورت بصری به عنوان دادههای برچسب تفسیر شدند. در این مورد، تنها دو کلاس مورد نیاز بود، “محلی” و “غیر خانگی”، که نشان دهنده وجود یا عدم وجود خانه است. شبکه های عصبی عمیق معمولا با داده های آموزشی بیشتر عملکرد بهتری دارند. مدل های آموزش داده شده بر روی مجموعه داده های کوچک به خوبی تعمیم داده نمی شوند و از برازش بیش از حد رنج می برند. استفاده از افزایش داده ها برای افزایش تعداد کل تصاویر آموزشی ضروری است. این مشکل با تقسیم بندی تمام تصاویر ۶۵۰ × ۶۵۰ به وصله های ۱۶۰ × ۱۶۰ برطرف شد. ۱۸۸ جفت تصویر (تصویر و شطرنجی برچسب مربوطه) در مجموع به ۴۳۲۴ جفت تصویر افزوده شدند. پردازش و فضایی سازی داده ها با استفاده از Python 3.6 و ArcGIS 10 انجام شد. ۵ به ترتیب. پارامتر اعتبار سنجی متقاطع تقسیم داده ها برابر با ۰٫۲ بود و shuffle True بود. برای مجموعه داده آموزشی، ۳۴۵۰ تصویر و ۸۷۴ تصویر باقی مانده برای اعتبارسنجی در طول آموزش استفاده شد. بهینه ساز آدام دارای شتاب ۰٫۹ و نرخ یادگیری ۰٫۰۰۰۱ بود. این شبکه برای ۱۰۰ دوره با استفاده از آنتروپی متقاطع باینری به عنوان تابع ضرر آموزش داده شد. شباهت با استفاده از ضریب جاکارد اندازه گیری شد [۲۲ ]. تمام آزمایش ها با استفاده از Keras 2.2.2 با TensorFlow 1.10.0 با استفاده از پایتون ۳٫۶ اجرا شد.
۲٫۳٫۳٫ اعتبار سنجی
برای ارزیابی عملکرد در تجزیه و تحلیل آماری از شاخص های کمی زیر استفاده شد: دقت کلی، دقت، یادآوری و امتیاز F ۱٫ این شاخص ها به صورت مثبت های واقعی محاسبه شده ( TPs )، مثبت های کاذب ( FPs )، منفی های درست ( TNs )، و منفی های کاذب ( FNs ) ارائه می شوند. برای یک کلاس ل، TP تعداد پیکسل هایی است که به درستی به عنوان طبقه بندی شده اند ل. FP تعداد پیکسل هایی است که به اشتباه طبقه بندی می شوند ل. در نهایت، FN نشان دهنده پیکسل هایی است که به آن تعلق دارند لاما توسط مدل با برخی کلاس های دیگر مرتبط هستند.
دقت و یادآوری شاخص های رایجی هستند که برای ارزیابی عملکرد طبقه بندی استفاده می شوند [ ۲۳ ]. با این حال، این دو شاخص گاهی اوقات متناقض هستند. بنابراین، ما از F ۱ برای سنتز استفاده کردیم [ ۲۴ ]. علاوه بر این، برای ارزیابی بیشتر عملکرد رویکرد توسعهیافته، از تقاطع بیش از اتحادیه ( IoU ) استفاده کردیم که نشاندهنده نزدیکی شی پیشبینیشده به حقیقت زمین است. در معادله (۵)، آو بدو نمونه داده متفاوت هستند [ ۲۱ ].
۲٫۴٫ تولید مدل ارتفاع ساختمان و برآورد مساحت طبقات خانه
تخمین مساحت طبقات باید بر اساس ابرهای نقطه ای و ساختارهای سه بعدی ساختمان های روستایی باشد. دو نوع تکنیک سنجش از دور برای کاربرد بر روی پلتفرم های پهپاد مناسب هستند: اسکن لیزری هوابرد (ALS) و ساختار از حرکت (SfM). تکنیک های فتوگرامتری SfM از نظر دقت عملکرد ضعیفی دارند، در حالی که ALS می تواند برآوردهای دقیق تری از ساختارهای عمودی ساختمان ها ارائه دهد [ ۲۵ ]. با این حال، SfM آسانتر از ALS در دسترس است زیرا SfM برای کاربران کشورهای در حال توسعه ارزان است [ ۲۶ ]. بنابراین، پهپادهایی که از فناوری SfM استفاده میکنند میتوانند دادهها را با وضوح مکانی و زمانی قابل قبول شناسایی کنند و آنها را به یک راهحل مقرونبهصرفه تبدیل کنند [ ۱۰ ]]. گردش کار روش SfM از دو فرآیند اصلی تشکیل شده است: تراز کردن تصاویر و ساختن هندسه. ابر نقطه سه بعدی با استفاده از نرم افزار Agrisoft Photoscan Professional Edition (Agisoft LLC، سنت پترزبورگ، روسیه) تولید شد [ ۲۷ ]. ابتدا موقعیت دوربین هر تصویر مشخص شد و با نقاط مشترک موجود در تصویر مطابقت داشت. این امکان شناسایی پارامترهای کالیبراسیون برای مقایسه تصویر را فراهم کرد. بر اساس موقعیت تخمینی دوربین و خود تصویر [ ۲۸ ]، سپس یک ابر نقطه ای ساخته شد و یک مدل زمین دیجیتال (DTM) تولید شد [ ۲۶ ].
ارتفاع یک ساختمان روستایی را می توان به عنوان ارتفاع BHM تقریبی کرد. از نظر تئوری، BHM را می توان با کم کردن مدل سطح دیجیتال (DSM) از DTM به دست آورد. DSM با درونیابی فضایی کریگر، بر اساس نقاط انتخاب شده از مناطق غیرمحلی به دست آمد. پس از درونیابی، جفتهای نقطهای از دادههای DSM درونیابی و دادههای DTM مشاهدهشده بهدست آمدند و برای آزمایش دقت برازش بین سطح درونیابی کریجینگ DSM و پهپاد DTM مورد استفاده قرار گرفتند. مساحت زمین خانه حاصل ضرب مساحت خانه و تعداد طبقات ساختمان است. مساحت خانه با الگوریتم U-net شناسایی شد. ارتفاع ساختمان با استفاده از تفاوت بین داده های ارتفاعی به دست آمده توسط پهپاد و داده های سطح زمین درون یابی محاسبه شد. برای به دست آوردن تعداد طبقات، آستانه هایی برای اندازه گیری ارتفاع ساختمان های روستایی با توجه به واقعیت محلی تشکیل شد. آستانه طبقه بندی به شرح زیر تعیین شد: یک لایه سطحی کمتر از ۱٫۰ متر، اختلاف ارتفاع ۱٫۰-۴٫۰ متر برای ساختمان هایی با طبقه همکف، اختلاف ارتفاع ۴٫۰-۸٫۰ متر برای ساختمان با دو طبقه، اختلاف ارتفاع. ۸٫۰-۱۲٫۰ متر برای سه طبقه و اختلاف ارتفاع بالای ۱۲٫۰ متر برای ساختمان های بیش از سه طبقه. سپس تعداد طبقات ساختمان بر اساس ارتفاع معمول طبقات ساختمان های محلی مانند همکف (فقط) طبقه، دو طبقه، سه طبقه و غیره به دست آمد. یک لایه سطحی کمتر از ۱٫۰ متر، اختلاف ارتفاع ۱٫۰-۴٫۰ متر برای ساختمان هایی با طبقه همکف، اختلاف ارتفاع ۴٫۰-۸٫۰ متر برای ساختمان با دو طبقه، اختلاف ارتفاع ۸٫۰-۱۲٫۰ متر برای سه طبقه ، و اختلاف ارتفاع بالای ۱۲ متر برای ساختمان های بیش از سه طبقه. سپس تعداد طبقات ساختمان بر اساس ارتفاع معمول طبقات ساختمان های محلی مانند همکف (فقط) طبقه، دو طبقه، سه طبقه و غیره به دست آمد. یک لایه سطحی کمتر از ۱٫۰ متر، اختلاف ارتفاع ۱٫۰-۴٫۰ متر برای ساختمان هایی با طبقه همکف، اختلاف ارتفاع ۴٫۰-۸٫۰ متر برای ساختمان با دو طبقه، اختلاف ارتفاع ۸٫۰-۱۲٫۰ متر برای سه طبقه ، و اختلاف ارتفاع بالای ۱۲ متر برای ساختمان های بیش از سه طبقه. سپس تعداد طبقات ساختمان بر اساس ارتفاع معمول طبقات ساختمان های محلی مانند همکف (فقط) طبقه، دو طبقه، سه طبقه و غیره به دست آمد.
جایی که مناطقخانه دارمساحت کل زمین خانه، متر مربع است . مناطقپایهمساحت پایه خانه، متر مربع است . و نطبقهتعداد طبقات ساختمان روستایی است.
۳٫ نتایج
۳٫۱٫ تشخیص Homestead بر اساس الگوریتم U-Net
شکل ۳ نتایج دقیق شناسایی U-net سطح زمین خانه را با تصاویر پهپاد برای منطقه نشان دهنده نشان می دهد. حداقل نرخ تلفات مدل ۰۱/۰ و بازده جاکارد ۹۸/۰ بوده است. نتایج اعتبار سنجی شناسایی خانه مبتنی بر الگوریتم U-net در جدول ۱ ارائه شده است. دقت کلی، یعنی ۰٫۹۲، بیشتر از بقیه بود.
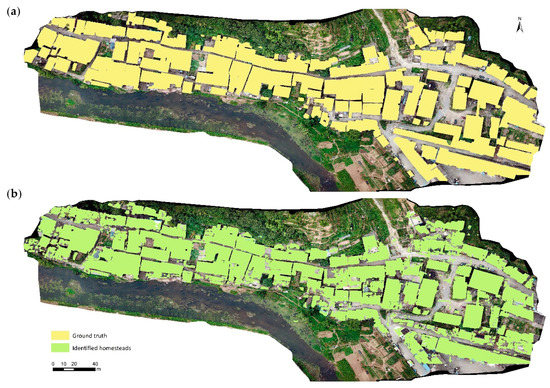
شکل ۴ مقایسه ای از مساحت و توزیع فضایی زمین های مسکونی بین حقیقت زمین و مقدار برآورد شده توسط U-net در سطح روستا را نشان می دهد. جدایی واضح بین دستههای خانگی و غیرمحلی آشکار است. در مقایسه با حقیقت زمینی، جادههای روستا، باغهای سبزی و درختان را میتوان بهطور مؤثری به عنوان متعلق به دسته غیرمحلی طبقهبندی کرد. درجه بالایی از سازگاری بین این دو وجود دارد، تنها لبه های نتایج شناسایی U-net تا حدودی نامنظم هستند.
۳٫۲٫ برآورد طبقه برای ساختمان های روستایی بر اساس پهپاد DTM
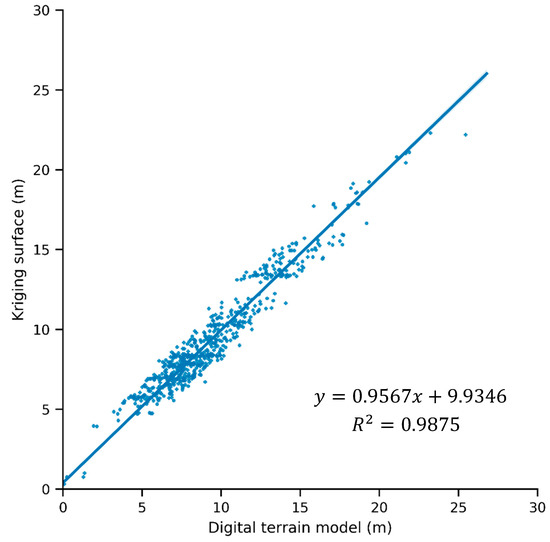
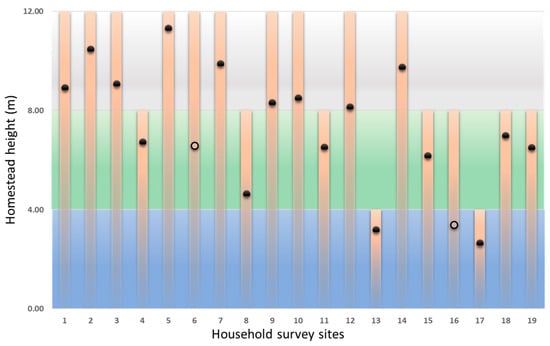
شکل ۵ a DTM ایجاد شده با روش SfM را با اختلاف ارتفاع ۵۰٫۱۱ متر در منطقه مورد مطالعه نشان می دهد (یعنی ۵۰٫۱۱ متر در بالاترین نقطه در سمت شمالی و ۰ متر در کانال رودخانه در سمت جنوبی). DSM با درونیابی فضایی کریگر، بر اساس ۶۳۳ نقطه انتخاب شده از مناطق غیرمحلی ( شکل ۵ ب) به دست آمد. پس از درونیابی، جفتهای ۶۳۳ نقطهای از DSM درونیابی شده و دادههای DTM مشاهدهشده بهدست آمد و برای آزمایش دقت برازش بین DSM سطح درونیابی کریجینگ و DTM پهپاد استفاده شد. شکل ۶ نمودار پراکندگی جفت های ۶۳۳ نقطه ای DSM و DTM را نشان می دهد که دارای یک آر۲ارزش ۰٫۹۸۷۵٫ این نشان می دهد که DSM و DTM دارای دقت مناسبی هستند. سپس، مدل ارتفاع دیجیتال با استفاده از اختلاف ارتفاع بین DTM و DSM در منطقه خانهدار شناسایی شده توسط الگوریتم U-net به دست آمد ( شکل ۵ ج). BHM به طبقات مختلف تقسیم شد ( شکل ۵ ج). نوزده مجموعه داده نظرسنجی خانوار برای آزمایش سازگاری تعداد طبقات بهدستآمده از BHM در دسترس بود. سازگاری در مقایسه با داده های نظرسنجی ۰٫۸۹ بود ( شکل ۷ ). این یک دقت کلی قابل قبول است و فقط دادههای سایتهای بررسی خانوار ششم و شانزدهم در امتداد محور x دستکم گرفته شدند.
۳٫۳٫ مساحت طبقات تخمینی در سطح روستا
مساحت کل خانه های شناسایی شده توسط الگوریتم U-net 17477.52 متر مربع بود . تعداد طبقات ساختمان در شکل ۵ ج نشان داده شده است. طبق رابطه (۶)، مساحت ساخته شده در روستا معادل ۲۵/۳۷۹۶۵ مترمربع است که از این میزان مساحت طبقات همکف به تنهایی ۰۲/۱۲ درصد از کل مساحت خانه را تشکیل می دهد، در حالی که طبقات دوم، سوم و طبقات فراتر از آن. طبقه سوم به ترتیب ۳۴٫۱۱، ۳۳٫۷۹ درصد و ۲۰٫۰۸ درصد از کل مساحت خانه را به خود اختصاص داده است. بنابراین، این نتایج نشان میدهد که اکثر ساختمانهای منطقه مورد بررسی شامل دو و سه طبقه هستند که با قراردادهای معماری در روستاهای جنوب چین مطابقت دارد.
۴٫ بحث
روشی مبتنی بر تصاویر پهپاد و الگوریتم U-net برای تخمین زمینهای مسکونی و زمین در سطح روستا، با مزیت گرفتن تصویر در زمان واقعی، شناسایی مبتنی بر پیکسل و تشخیص مدلسازی سهبعدی توسعه داده شد. دقت کلی حاصل به ترتیب ۰٫۹۲ و ۰٫۸۹ برای مساحت خانه و تعداد طبقات ساختمان بود. بنابراین، تجربه ما از استفاده از ترکیبی از فناوریهای پهپاد و U-net برای شناسایی اشیاء در سطح روستا، جایگزینی بالقوه برای بررسیهای وقتگیر و پر زحمت خانگی ارائه میدهد که پیامدهای مهمی برای اصلاحات در حال انجام استفاده از خانه و مدیریت در چین، به ویژه برای تایید مالکیت خانه
در جدول ۱ ، U-net دقت بالایی در شناسایی ساختمان ها در این مطالعه نشان داد. تلاشهای زیادی برای استفاده از شبکههای عصبی کانولوشن (CNN) برای بهبود عملکرد تشخیص ساختمان بر اساس فناوری تشخیص اشیاء انجام شده است [ ۱۵ ، ۱۶ ]. با این حال، تکنیکهای تشخیص اشیا از قابهای مستطیلی برای مکانیابی اشیا استفاده میکنند و توزیع ساختمانهای خانهدار و اشکال نامنظم سطوح سقف، دقت شناسایی این روشها را محدود میکند [ ۱ ]. کنستانتینیدیس و همکاران یک معماری ماژولار CNN برای شناسایی ساختمانها با فناوری تشخیص مبتنی بر پیکسل [ ۲۹ ] پیشنهاد کرد، که در آن شبکه یاد میگیرد تا برخی از پیشبینیهای متراکم را برای هر پیکسل ارائه دهد [ ۲۱ ]]. معماری مبتنی بر پیکسل کاملاً پیچیده است. بنابراین، در این کار، ما از معماری مبتنی بر پیکسل رایج استفاده کردیم. پاپادومانولاکی و همکاران روشهای متعدد مبتنی بر معماری CNN را مقایسه کرد و پیکسلهایی را که به یک شی تعلق داشتند تا تحت یک دسته معنایی طبقهبندی شوند [ ۲۱ ] اجباری کرد. بنابراین، نتایج این مطالعه مزیت U-net و معماری مبتنی بر پیکسل را برای تخمین مساحت خانههای روستایی اثبات میکند.
با این حال، برخی از منابع خطا باقی می مانند. تخمین های BHM کلید تعیین مساحت طبقات ساختمان های روستایی است. در تئوری، ارتفاع یک جسم را می توان از روی تصویر پهپاد آن با استفاده از فتوگرامتری، با کم کردن DSM از DTM محاسبه کرد [ ۳۰ ]. با این حال، استخراج BHM از DTM مشتق از پهپاد دشوار است زیرا سطح زمین توسط سقف پوشیده شده است [ ۳۱ ]. علاوه بر این، DSM برای استفاده از نقاط کنترل ارتفاع واقع در محدوده مسیرهای کشور در اطراف خانهها برآورد شد. از آنجایی که مسیرهای روستایی در بخش جنوبی چین به طور کلی باریکتر هستند، خطاهای سطح درونیابی DSM برای مسیرهای باریک نسبت به سایر مناطق باز کمی بیشتر بود. شکل ۴b مقایسه ای از نقاط کنترل زمینی درون یابی شده و DSM مشتق شده از پهپاد را نشان می دهد. هر دو تطابق عالی را نشان دادند، زیرا R ۲ برابر ۰٫۹۹ بود. با این حال، همانطور که قبلا توضیح داده شد، مقادیر ارتفاع DSM تولید شده با تصاویر پهپاد معمولا برای جاده های باریک احاطه شده توسط ساختمان ها بیش از حد برآورد می شد. بنابراین، آستانه سطح ارتفاع DSM را کمتر از ۱ متر برای سطح زمین قرار می دهیم.
علاوه بر این، میانگین شیب منطقه تقریباً ۳۰ درجه است که دشواری درونیابی دقیق را افزایش می دهد. اگر منطقه مورد مطالعه در دشت واقع شود، عدم قطعیت ناشی از شیب نسبتا کم خواهد بود. با این حال، در زمین های پیچیده، مانند آنچه در این مطالعه، بهبود دقت نیاز به افزایش در نقاط نمونه برداری بررسی و اندازه گیری شده است.
U-net از نظر تعداد نمونه های آموزشی یک مزیت را فراهم می کند، زیرا الگوریتم به مقدار کمی داده برای آموزش مدل نیاز دارد [ ۲۰ ]. با توجه به برد محدود پروازهای پهپاد، ۱۸۸ جفت تصویر به ۴۳۲۴ جفت تصویر افزوده شد. دقت کلی تشخیص شبکه یادگیری عمیق U-net به طور کلی خوب بود (۰٫۹۲)، و تقسیم بندی سریع تصویر با مدل ایجاد شده امکان پذیر بود. تقویت داده ها نقش حیاتی ایفا کرد و به چند تصویر حاشیه نویسی و یک زمان آموزشی بسیار معقول اجازه داد تا تشخیص تصویر را کامل کنند. با این حال، این سوال باقی می ماند که آیا محدودیت کمتری از تصاویر حاشیه نویسی برای U-net وجود دارد تا با دقت کار کند. در مطالعات بعدی، ما قصد داریم جفت های تصویر آموزشی را کاهش دهیم تا استحکام U-net را آزمایش کنیم.
علاوه بر این، این مطالعه به ۱۹ سایت بررسی زمینی اشاره کرد و تکنیک پیشنهادی ثبات ۸۹٫۴۷٪ را ارائه داد. این عدد ممکن است بیش از حد یا دست کم گرفته شود. با این حال، در طی بررسیهای خانوار، اکثر کشاورزان وضعیت واقعی را منعکس میکنند و شواهدی مبنی بر مالکیت خانه تأیید شد، اما ممکن است برخی از توصیفها مغرضانه باشد.
۵٫ نتیجه گیری ها
در این مطالعه، روشی مبتنی بر تصاویر پهپاد و الگوریتم U-net برای تخمین مساحت زمین و خانه در سطح روستا، با مزیت دریافت تصویر در زمان واقعی، شناسایی مبتنی بر پیکسل و تشخیص مدلسازی سهبعدی توسعه داده شد. دقت کلی حاصل برای تخمین مساحت خانه و تعداد طبقات ساختمان به ترتیب ۰٫۹۲ و ۰٫۸۹ بود. این روش یک جایگزین بالقوه برای بررسیهای وقتگیر و پرهزینه خانوار است و بنابراین، نه تنها برای استفاده و مدیریت خانهها، بلکه برای تأیید مالکیت خانه در چین نیز از اهمیت بالایی برخوردار است. ترکیب تصاویر پهپاد و الگوریتم U-net ممکن است کاربردهای گسترده تری در زمینه استفاده و مدیریت خانه داشته باشد. به عنوان مثال، تعداد گلخانه ها، تاسیسات آبیاری، و حتی ماشین آلات کشاورزی از اجزای مهم بررسی خانوارهای روستایی هستند. روش پیشنهادی میتواند به تصمیمگیرندگان کمک کند تا وضعیت فعلی محیط اجتماعی-اقتصادی روستایی را درک کنند و بر این اساس توصیههای سیاستی ارائه کنند. در آینده، دقت مدل برای استفاده در مناطق با توپوگرافی پیچیده و مسکن متراکم بیشتر بهبود خواهد یافت.