
حساسیت زمین لغزش به عوامل مختلف مانند زمین شناسی، کاربری زمین/پوشش زمین (LULC)، شیب و ارتفاع بستگی دارد. بر خلاف سایر عوامل که در طول زمان نسبتاً پایدار هستند، LULC یک عامل پویا مرتبط با فعالیت های انسانی است. این مطالعه تأثیر تغییر LULC را بر حساسیت زمین لغزش در شهرداری Rangamati منطقه Rangamati، بنگلادش، بر اساس سه سناریو LULC – LULC موجود (۲۰۱۸)، LULC پیشنهادی (پیشنهاد شده در سال ۲۰۱۰، اما هنوز اجرا نشده) ارزیابی میکند. شبیه سازی LULC سال ۲۰۲۸ – با استفاده از اتوماتای سلولی مبتنی بر شبکه عصبی مصنوعی (ANN). برای تهیه نقشه حساسیت زمین لغزش از مدل جنگل تصادفی استفاده شد. مدل دقت خوبی برای هر سه سناریو LULC (موجود: ۸۲٫۷٪؛ پیشنهادی: ۸۱٫۴٪؛ و ۲۰۲۸: ۷۸٫۳٪) و همبستگی های مثبت قوی (> 0) نشان داد. ۸) بین نقشه های مختلف حساسیت زمین لغزش. LULC یا سومین یا چهارمین عامل مهم در این سناریوها است که نشان می دهد تأثیر متوسطی بر حساسیت زمین لغزش دارد. تغییرات آتی LULC احتمالاً حساسیت زمین لغزش را افزایش می دهد، با افزایش ۱۴٫۵٪ در ناحیه حساسیت بالا برای هر دو سناریو LULC پیشنهادی و شبیه سازی شده. این یافته ها ممکن است به سیاستگذاران در اجرای برنامه ریزی شهری مناسب کمک کند و اهمیت در نظر گرفتن حساسیت زمین لغزش در برنامه ریزی LULC را برجسته کند. ۵ درصد افزایش در ناحیه حساسیت بالا برای سناریوهای LULC پیشنهادی و شبیه سازی شده. این یافته ها ممکن است به سیاستگذاران در اجرای برنامه ریزی شهری مناسب کمک کند و اهمیت در نظر گرفتن حساسیت زمین لغزش در برنامه ریزی LULC را برجسته کند. ۵ درصد افزایش در ناحیه حساسیت بالا برای سناریوهای LULC پیشنهادی و شبیه سازی شده. این یافته ها ممکن است به سیاستگذاران در اجرای برنامه ریزی شهری مناسب کمک کند و اهمیت در نظر گرفتن حساسیت زمین لغزش در برنامه ریزی LULC را برجسته کند.
کلید واژه ها:
حساسیت زمین لغزش ; سناریوهای کاربری زمین/پوشش زمین ؛ شبکه عصبی مصنوعی ; جنگل تصادفی ; شهرداری رنگاماتی
۱٫ مقدمه
رانش زمین باعث آسیب به زیرساخت ها و تلفات در سراسر جهان می شود. به عنوان نمایشی از احتمال مکانی زمین لغزش در یک منطقه [ ۱ ، ۲ ]، نگاشت حساسیت زمین لغزش برای کاهش بلایای زمین لغزش حیاتی است [ ۳ ، ۴ ، ۵ ]. نقشه های حساسیت زمین لغزش با استفاده از فهرست زمین لغزش و عوامل علت تولید می شود [ ۶ ، ۷ ، ۸ ]. فهرست زمین لغزش مکان های زمین لغزش را نشان می دهد، در حالی که عوامل اتفاقی زمین لغزش شرایط مناسبی را برای زمین لغزش ایجاد می کند [ ۴ ، ۹ ]]. مدلهای مختلف آماری و یادگیری ماشینی، از جمله رگرسیون لجستیک، تحلیل تفکیک خطی، جنگل تصادفی، ماشینهای بردار پشتیبان، درخت تصمیم، تقویت گرادیان شدید (XGBoost)، نسبت فرکانس و ضریب اطمینان، برای نقشهبرداری حساسیت زمین لغزش استفاده شده است [ ۷ ، ۹ ] , ۱۰ , ۱۱ , ۱۲ , ۱۳ , ۱۴ , ۱۵ , ۱۶ , ۱۷ ]. این مدل ها روابط بین وقوع زمین لغزش و عوامل علّی را برای تعیین احتمال فضایی در منطقه بررسی می کنند [ ۸ ، ۱۸ ، ۱۹ ]]. مدلهای آماری ساده مانند رگرسیون لجستیک، نسبت فرکانس و ضریب قطعیت میتوانند نتایج به راحتی قابل درک با دقت رضایتبخش تولید کنند [ ۹ ، ۲۰ ]. با این حال، مدلهای پیشرفته یادگیری ماشین مانند جنگلهای تصادفی و شبکههای عصبی مصنوعی (ANN) معمولاً دقت بسیار بالاتری دارند، اما قابلیت تفسیر کمتری دارند [ ۲۱ ].
عوامل زمین لغزش را می توان به عوامل زمین شناسی، از جمله سنگ شناسی و فاصله از خطوط گسل طبقه بندی کرد. عوامل فیزیوگرافی مانند شیب، جنبه، انحنای پلان و انحنای پروفیل. و عوامل محیطی مانند کاربری/پوشش زمین (LULC) و فاصله از رودخانه [ ۲۲ ]. عوامل زمین شناسی و فیزیولوژیکی به دلیل پایداری نسبی به طور کلی ایستا در نظر گرفته می شوند. در مقابل، عوامل محیطی، به ویژه LULC، پویا هستند [ ۱۹ ]. انواع مختلف LULC اثرات متفاوتی بر زمین لغزش دارند. به عنوان مثال، پوشش گیاهی معمولاً یک شیب را تثبیت می کند، زیرا ریشه های درختان خاک را در کنار هم نگه می دارند. بنابراین، حذف پوشش گیاهی می تواند شرایط مساعدی را برای زمین لغزش ایجاد کند [ ۱۹]. به طور مشابه، مانند راه سازی، توسعه زیرساختی شیب ها را تغییر می دهد و باعث رانش زمین می شود [ ۲۳ ].
چندین مطالعه تأثیر تغییر LULC را بر حساسیت زمین لغزش ارزیابی کرده اند [ ۱۹ ، ۲۴ ، ۲۵ ، ۲۶ ، ۲۷ ، ۲۸ ، ۲۹ ]. جنگل زدایی که عمدتاً با فعالیت های کشاورزی مرتبط است، فرآیندهای هوازدگی و فرسایش را افزایش می دهد و در نهایت حساسیت زمین لغزش یک منطقه را افزایش می دهد [ ۳۰ ]. چن و همکاران (۲۰۱۹) [ ۲۶ ] تأثیر LULC بر حساسیت زمین لغزش را بر اساس نقشههای LULC دههای ارزیابی کرد. رایشنباخ و همکاران (۲۰۱۴) [ ۱۹] اثرات سناریوهای مختلف LULC را بر حساسیت زمین لغزش در حوضه بریگا مسینا، ایتالیا ارزیابی کرد. با این حال، این مطالعات از سناریوهای مختلف LULC برای ارزیابی بدون در نظر گرفتن نقش روند تغییر LULC بر حساسیت زمین لغزش استفاده کردند. منسس و همکاران (۲۰۱۹) [ ۲۷ ] اثرات دو نقشه مختلف LULC را بر حساسیت زمین لغزش ارزیابی کرد. هدف اصلی آنها ارزیابی تأثیر کیفیت LULC بر حساسیت زمین لغزش بود. لیو و همکاران (۲۰۲۱) [ ۲۹] تأثیر تغییر LULC را بر حساسیت زمین لغزش در طی ۳۸ سال در شهرستان لیکسیان، چین ارزیابی کرد. این مطالعه نشان میدهد که حساسیت زمین لغزش در زمینهای کشاورزی و زمینهای ساختمانی روستایی و شهری افزایش مییابد که نشاندهنده تأثیر فعالیتهای انسانی بر حساسیت زمین لغزش است.
در روزهای اخیر، روش های یادگیری ماشین برای شبیه سازی تغییر LULC و پتانسیل انتقالی انواع LULC استفاده شده است [ ۳۱ ، ۳۲ ، ۳۳ ]. LULC شبیهسازیشده سناریوی کسبوکار معمول (BAU) در نظر گرفته شده است و ذهنیت را کاهش میدهد [ ۱۹ ، ۳۰ ، ۳۴ ]. در عین حال، برنامه ریزی LULC برای به حداقل رساندن اثرات مخاطرات طبیعی اتخاذ شده است. اگرچه به طور کلی فرض بر این است که LULC برنامه ریزی شده اثرات مخاطرات طبیعی را کاهش می دهد، مطالعات کمی تأثیر یک LULC برنامه ریزی شده را بر حساسیت زمین لغزش ارزیابی کرده اند.
اکثر مطالعات یا تأثیر تغییر LULC در گذشته را بر حساسیت زمین لغزش ارزیابی کرده اند [ ۲۹ ] یا تأثیر سناریوهای تعریف شده آینده را بر حساسیت زمین لغزش ارزیابی کرده اند [ ۱۹ ]. مطالعات بسیار کمی تاثیر LULC شبیه سازی شده (سناریوی BAU) را بر حساسیت زمین لغزش ارزیابی کرده اند. ارزیابی اینکه چگونه تغییر LULC در یک BAU و به روشی برنامه ریزی شده ممکن است بر حساسیت زمین لغزش یک منطقه تأثیر بگذارد ضروری است. علاوه بر این، این به درک نقش برنامه ریزی LULC در کاهش اثرات زمین لغزش کمک می کند. در این مطالعه، ما تأثیر تغییر LULC را بر حساسیت زمین لغزش شهرداری Rangamati، بنگلادش ارزیابی کردیم. رانش زمین عمدتاً در مناطق تپهای چیتاگونگ (CHA) (جنوب بنگلادش) رخ میدهد [ ۳۵ ،۳۶ ] در بنگلادش، به ویژه در سه منطقه شهری منطقه شهری چیتاگونگ (CMA)، بازار کاکس، و شهرداریهای رانگاماتی. این مناطق شهری از تغییر برنامه ریزی نشده LULC رنج می برند [ ۲۳ ، ۳۶ ، ۳۷ ]. بنابراین، ارزیابی تغییرات LULC آینده در حساسیت زمین لغزش در شهرداری Rangamati بسیار مهم است. ما تغییر حساسیت زمین لغزش را با استفاده از طرح LULC پیشنهادی ارزیابی کردیم و LULC سال ۲۰۲۸ (BAU) را شبیهسازی کردیم. به طور خاص، این مطالعه به پاسخگویی به سؤالات تحقیق زیر کمک کرد: الف) سناریوی حساسیت به زمین لغزش در شرایط BAU تغییر LULC چیست، و ب) آیا تغییر برنامه ریزی شده LULC می تواند از افزایش حساسیت به زمین لغزش در منطقه مورد مطالعه جلوگیری کند؟
۲٫ مواد و روشها
۲٫۱٫ منطقه مطالعه
شهرداری Rangamati ( شکل ۱ ) مقر اداری منطقه Rangamati است. تقریباً ۶۴٫۸ کیلومتر مربع از منطقه بین ۲۲°۳۷’۶۰ شمالی و ۹۱°۲’۰ شرقی را پوشش می دهد. کل جمعیت حدود ۱۵۰۰۰۰ نفر است، شش برابر بیشتر از ظرفیت حمل منطقه [ ۳۸ ]. تراکم جمعیت حدود ۲۰۰ نفر در کیلومتر مربع است [ ۳۹ ] . ارتفاع از سطح دریا بین ۰ تا ۱۹۵ متر است. پوشش گیاهی ۷۵ درصد از مساحت منطقه مورد مطالعه و بدنه های آبی ۱۸ درصد را پوشش می دهد. نیمی از منطقه مورد مطالعه قابل سکونت است و به همین دلیل است که مردم جنگل ها و تپه های هموار را برای گسترش شهرک ها و ایجاد زیرساخت های جدید پاکسازی می کنند [ ۳۸ ]]. حداکثر و حداقل میانگین سالانه دما به ترتیب ۳۶٫۵ درجه سانتیگراد و ۱۲٫۵ درجه سانتیگراد است. میانگین بارندگی سالانه حدود ۲۶۷۳ میلی متر است [ ۳۹ ]. رسوبات ثالثی و چهارتایی چین خورده، گسله دار و برآمده منطقه مورد مطالعه را تشکیل می دهند [ ۲۳ ]. دریاچه کاپتای واقع در شرق منطقه مورد مطالعه، دریاچه ای مصنوعی است که در اثر احداث سد کاپتای به وجود آمده است.
شهرداری رانگاماتی مستعد رانش زمین است و در طول ژوئن تا ژوئیه ۲۰۱۷، ۷۳ نفر بر اثر رانش زمین جان خود را از دست دادند [ ۳۸ ]. در یک دوره کوتاه، بارندگی موسمی بیش از حد باعث رانش زمین شد [ ۲۳ ، ۴۰ ]. در منطقه مورد مطالعه، تراکم جمعیت در دو دهه گذشته دو برابر شده است، زیرا مردم به این شهر مهاجرت کرده اند [ ۳۸ ]. به دلیل نزدیکی به دریاچه کاپتای و مناظر دیدنی طبیعی، صنایع گردشگری شروع به رشد کرده اند. در سال های اخیر، مزارع در بخش غربی شهر رایج شده است [ ۲۳ ]. پوشش گیاهی طبیعی برای مزارع حذف شده است و باعث افزایش فرسایش خاک می شود [ ۳۸]. تغییرات برنامه ریزی نشده LULC مانند تبدیل پوشش گیاهی طبیعی به کشاورزی مزرعه ای، توسعه زیرساختی و گردشگری و کشاورزی، خطر زمین لغزش را در این منطقه افزایش داده است.
۲٫۲٫ نقشه برداری حساسیت زمین لغزش
۲٫۲٫۱٫ فهرست زمین لغزش و عوامل عامل زمین لغزش
ما از ۶۵ مکان لغزش ( شکل ۱ ) برای نگاشت حساسیت استفاده کردیم. از این زمین لغزش ها، ۵۴ زمین لغزش در طول ژوئن تا ژوئیه ۲۰۱۷ رخ داد و در میدان نقشه برداری شد. بقیه زمین لغزش ها با استفاده از تفسیر بصری تصاویر Google Earth نقشه برداری شدند. این زمین لغزش ها از ژانویه ۲۰۰۱ تا ژوئن ۲۰۱۷ رخ داده است. از ۶۵ زمین لغزش، انواع برای ۴۳ زمین لغزش شناسایی شد. متأسفانه برخی از زمین لغزش ها (۱۱) قدیمی بوده و تعیین نوع آنها مشکل بوده است. در منطقه مورد مطالعه، لغزش (۱۸) غالب ترین نوع زمین لغزش است و پس از آن جریان (۱۶) و پیچیده (۷) قرار دارند.
همان تعداد غیر زمین لغزش (۶۵؛ عدم وجود داده) از مناطق نسبتاً ایمن ایجاد شد. این مکان های لغزش و غیر لغزش به مجموعه داده های آموزشی (۸۰٪؛ ۱۰۴) و اعتبارسنجی (۲۰٪؛ ۲۶) تقسیم شدند.
در این تحقیق از ده عامل علت زمین لغزش ارتفاع، شیب، جهت، شاخص رطوبت توپوگرافی (TWI)، شاخص توان جریان (SPI)، فاصله از شبکه زهکشی، انحنای پلان، فاصله انحنای پروفیل از خطوط گسل و LULC استفاده شد. ما ۳۰ متر را به عنوان رزولوشن برای نقشه حساسیت زمین لغزش انتخاب کردیم زیرا اکثر عوامل علت با این تفکیک هستند.
عوامل علّی نسبتاً پایدار
اکثر عوامل علی که ما انتخاب کردیم، به جز LULC، عوامل نسبتاً پایداری هستند. رادیومتر بازتاب گسیل حرارتی پیشرفته (ASTER) (30 متر × ۳۰ متر) DEM برای استخراج ارتفاع، شیب، جنبه، انحنای پلان، و انحنای پروفیل استفاده شد ( شکل ۲ a-e). شیب یکی از مهم ترین عوامل سببی در نظر گرفته می شود زیرا احتمال زمین لغزش با افزایش شیب افزایش می یابد [ ۲۲ ]. عوامل دیگری مانند فشار منافذ و زهکشی آب نیز به شیب بستگی دارد [ ۷]. Aspect جهت شیب را نشان می دهد. انحنای پروفیل به صورت موازی با جهت حداکثر شیب تعریف می شود. در مقابل، انحنای پلان عمود بر جهت حداکثر شیب است. این سه عامل ممکن است مستقیماً بر حساسیت زمین لغزش تأثیر نگذارند، اما همراه با عوامل دیگر، می توانند شرایط مساعدی را برای زمین لغزش ایجاد کنند [ ۲۲ ، ۳۵ ]. فاصله از شبکه زهکشی ( شکل ۲ f) از شبکه زهکشی دریافت شده از GeoDash، یک پایگاه داده مکانی با دسترسی باز ارائه شده توسط دولت بنگلادش، استخراج شده است. هر دو شاخص رطوبت توپوگرافی (TWI) ( شکل ۲ گرم) و شاخص توان جریان (SPI) ( شکل ۲ ساعت) عوامل هیدرولوژیکی مرتبط با پتانسیل رواناب هستند [۲۲ ]، و آنها نیز از DEM مشتق شده بودند. نقشه خطوط گسل از سازمان زمین شناسی بنگلادش (GSB) برای تعیین فاصله از خطوط گسل استفاده شد ( شکل ۲ i). فواصل نزدیکتر به خطوط گسل به طور کلی نشان دهنده مکان های ضعیف با احتمال زیاد زمین لغزش است [ ۲۲ ].
کاربری زمین / پوشش زمین
متفاوت از عوامل پایداری که در بالا توضیح داده شد، LULC یک عامل پویا است. به عنوان مثال، عابدین و همکاران. (۲۰۲۰) [ ۲۳ ] دریافتند که LULC بر حساسیت زمین لغزش منطقه مورد مطالعه تأثیر می گذارد. به طور خاص، فعالیت های انسانی مانند کشاورزی مزرعه و توسعه زیرساخت های شهری باعث تغییر سریع LULC می شود. در این مقاله، ما تاثیر سه سناریو LULC را بر حساسیت زمین لغزش بررسی کردیم: (الف) LULC موجود (۲۰۱۸) ( شکل ۳ ب)، (ب) یک LULC پیشنهادی ( شکل ۳ د)، و (ج) یک LULC شبیه سازی شده سال ۲۰۲۸ ( شکل ۳ ج).
LULC موجود در سال ۲۰۱۸
یک تصویر Landsat 8 OLI در طول فصل خشک (۲۹ نوامبر ۲۰۱۸) برای طبقهبندی LULC سال ۲۰۱۸ استفاده شد. اصلاحات هندسی و رادیومتری قبل از طبقهبندی انجام شد و تصویر به سیستم مرکاتور عرضی بنگلادش (BTM) بازتاب داده شد. ما تصویر را بر اساس اصلاح طرح Anderson Level-I طبقه بندی کردیم [ ۴۱]. قبل از طبقهبندی، تمام دادههای ماهوارهای با استفاده از پروفایلهای طیفی و فضایی مورد مطالعه قرار گرفتند و اعداد دیجیتال به بازتاب سطحی تبدیل شدند. طرح طبقه بندی بر اساس اطلاعات جانبی بررسی میدانی، تفسیر تصویر بصری و دانش محلی منطقه مورد مطالعه ایجاد شد. طبقه بندی تصاویر با استفاده از الگوریتم طبقه بندی حداکثر احتمال نظارت شده (MLC) انجام شد. بر اساس تفسیر بصری مکانها در Google Earth و خود تصویر، ۶۰ چند ضلعی برای هر دسته دیجیتالی شد. نقشههای پوشش زمین با استفاده از نقشههای راهنمای منطقه Rangamati و تصاویر Google Earth تأیید شدند. بر اساس دانش منطقه مورد مطالعه، چهار نوع پوشش زمین، یعنی ساخته شده، آب، پوشش گیاهی و زمین برهنه طبقه بندی شدند. پوشش گیاهی شامل پوشش گیاهی طبیعی، کشاورزی مزرعه، و سایر اراضی کشاورزی؛ بدنههای آبی شامل دریاچهها، رودخانهها و برکهها هستند. اراضی بایر شامل زمین های بایر و زمین های زیر کشت و زرع می شود (در کشاورزی بریده و سوخته کشاورزان یک شیب جنگلی را پاک می کنند که در این صورت ما آن را زمین لخت می دانیم و سپس در آنجا محصولات کشاورزی می کنند که در این صورت آن را پوشش گیاهی می دانیم. ). پالایش پس از طبقه بندی برای بهبود دقت طبقه بندی استفاده شد [۴۲ ، ۴۳ ]. دقت طبقه بندی کلی ۹۱٫۰٪ و آمار کاپا ۰٫۸۸ بود. یک فیلتر اکثریت ۳*۳ نیز برای کاهش اثر نمک و فلفل در نقشه های طبقه بندی شده اعمال شد [ ۴۴ ].
دقت طبقهبندی با استفاده از دادههای میدانی و ویژگیهای جغرافیایی روی نقشههای کاربری زمین، نقشههای توپوگرافی از بررسی بنگلادش، و تفسیر بصری دادههای وضوح فضایی بسیار بالا از Google Earth ارزیابی شد. دقت کلی تصاویر طبقهبندیشده مشتقشده از Landsat 96% با ضریب کاپا مربوطه ۰٫۹۳ بود. دقت کاربر و تولیدکننده در کلاس های فردی به ترتیب بین ۷۳ تا ۱۰۰ درصد و ۸۹ تا ۱۰۰ درصد بود. دقت مطابق با استاندارد ۸۵-۹۰% برای مطالعات نقشه برداری LULC، همانطور که توسط اندرسون و همکاران پیشنهاد شده است. (۱۹۷۶) [ ۴۱ ].
کاربری اراضی پیشنهادی/پوشش زمین
سناریوی دوم LULC یک نقشه LULC پیشنهادی است ( شکل ۳ د) از واحد برنامه ریزی شهری شهرداری رانگاماتی تحت “پروژه مدیریت شهری و بهبود زیرساخت”. این LULC پیشنهادی هنوز اجرا نشده است. هدف ما ارزیابی این بود که آیا نقشه LULC پیشنهادی میتواند حساسیت زمین لغزش را کاهش دهد یا خیر. ارتباط با برنامه ریزان شهری شهرداری و ذینفعان نشان می دهد که در هنگام پیشنهاد نقشه LULC حساسیت زمین لغزش یا خطر زمین لغزش در نظر گرفته نشده است. با این حال، تمام قوانین برنامه ریزی شهری در تهیه LULC پیشنهادی استفاده شد. به عنوان مثال، مناطق جدید صنعتی و شهری فقط در مناطق با شیب ملایم پیشنهاد شده است.
ما این نقشه کاربری پیشنهادی را در ArcGIS دیجیتالی کردیم. برای مقایسه با سایر نقشههای LULC، ما هشت کلاس LULC نقشه پیشنهادی را به چهار نوع ترکیب کردیم: پوشش گیاهی، بدنههای آبی، ساختهشده و زمین برهنه. ما آنها را با این موارد حل کردیم: پوشش گیاهی که شامل جنگل طبیعی، کشاورزی مزرعه، و باغ است. زمین های ساخته شده که شامل سکونتگاه ها، جاده ها و مراکز تفریحی می شود. و زمین برهنه که شامل زمین های بایر و مناطق تحت کشت و زرع می شود.
کاربری زمین/پوشش زمین شبیه سازی شده
سناریوی سوم LULC یک LULC شبیه سازی شده برای سال ۲۰۲۸ است ( شکل ۳ ج). برای شبیهسازی LULC، تعیین عواملی که باعث تغییر LULC یک ناحیه میشوند، ضروری است. این کلاس های LULC توسط عوامل مختلفی کنترل می شوند [ ۳۳ ]. برای مناطق تپهای چیتاگونگ (CHA)، حسن و همکاران. (۲۰۲۰) از چهار دسته از عوامل تأثیرگذار استفاده کرد: اجتماعی-اقتصادی، نزدیکی به زیرساخت ساختمان، آب و هوا، ژئوفیزیک و محیطی. جدول ۱ عوامل و منابع داده های مورد استفاده در شبیه سازی LULC 2028 در این مطالعه را نشان می دهد.
یک مدل اتوماتای سلولی مبتنی بر شبکه عصبی مصنوعی (ANN) برای شبیهسازی و پیشبینی نقشه کاربری/پوشش زمین در سال ۲۰۲۸ بر اساس کاربری/پوشش زمین در سالهای ۲۰۰۸ و ۲۰۱۸ استفاده شد. برای پیادهسازی ANN- مدل CA، بسته نرمافزاری منبع باز QGIS’s MOLUSCE (Modules for Land-Use Change Evaluation) استفاده شد. این افزونه درصد تغییر مساحت را برای کاربری/پوشش زمین هر منطقه مورد مطالعه اندازه گیری می کند. علاوه بر این، این افزونه رگرسیون لجستیک، ارزیابی چند معیاره و وزن شواهد را برای اندازه گیری پتانسیل انتقالی بر اساس ماتریس تغییر و انتقال ارائه می کند [ ۴۵ ]. پتانسیل انتقالی در شبیهسازی اتوماتای سلولی پلاگینهای MOLUSCE برای پیشبینی استفاده از زمین/پوشش زمین در آینده استفاده شد [ ۴۶]. ما روش پیشنهادی لی و یه (۲۰۰۲) [ ۴۷ ] و ساپوترا و لی (۲۰۱۹) [ ۴۶ ] را برای پیشبینی LULC که دقت آن در مناطق مختلف چین حدود ۸۰ درصد بود، اتخاذ کردیم.
جدول ۲ ماتریس احتمال انتقالی LULC های مختلف از سال ۲۰۰۸ تا ۲۰۱۸ را نشان می دهد. این ماتریس بر اساس درصد تغییر LULC از سال ۲۰۰۸ تا ۲۰۱۸ است. مقادیر در ماتریس از ۰ تا ۱ متغیر است. هر چه مقدار بالاتر باشد، احتمال انتقال بیشتر است. از نوع کاربری که به نوع دیگری تبدیل می شود. فعال ترین نوع LULC پوشش گیاهی بود زیرا احتمال تغییر به زمین بایر (۰٫۲۸) و ایجاد شده (۰٫۳۴) بیشتر بود. از سوی دیگر، آبها و مناطق ساختهشده پایدارترین نوع بودند، زیرا دریاچه کاپتای یک منطقه حفاظتشده در منطقه مورد مطالعه است. بنابراین، احتمال تغییر دریاچه کاپتای حداقل است. از سوی دیگر، مناطق ساخته شده دوباره به پوشش گیاهی یا آب تبدیل نمی شوند.
در پلاگین MOLUSCE، اولین قدم تعریف متغیرهای ورودی برای شبیه سازی مبتنی بر شبکه عصبی است. داده های اولیه ما نقشه کاربری/پوشش اراضی سال ۲۰۰۸ و داده نهایی نقشه کاربری/پوشش اراضی سال ۲۰۱۸ بود. متغیرهای فضایی هشت متغیر اکتشافی ( جدول ۳ ) بودند که در بخش ورودی MOLUSCE استفاده شدند. افزونه درصد تغییر هر یک از کاربری/پوشش زمین بین نقشههای کاربری/پوشش زمین در سالهای ۲۰۰۸ و ۲۰۱۸ محاسبه شد. این ماتریس احتمال انتقالی را نیز ارائه میکند که نسبت سلولهای تغییر یافته از یک کاربری/پوشش زمین است. به دیگری.
مدلسازی پتانسیل انتقالی با استفاده از ادراک چند لایه ANN بخش اصلی ماژول است. در شبکه عصبی سه لایه ورودی، پنهان و خروجی وجود دارد. در اینجا، لایه های ورودی هشت متغیر اکتشافی هستند. برای تناسب کامل، از رویکرد ۲n/3 استفاده کردیم و از پنج نورون پنهان استفاده کردیم. نرخ یادگیری فراپارامتر است و مقدار نرخ یادگیری بالا یک مدل ناپایدار ارائه می دهد. به طور همزمان، نرخ یادگیری پایین باعث یک فرآیند آموزشی طولانی می شود [ ۴۸ ]. در این مطالعه میزان یادگیری ۰۰۱/۰ بود.
احتمال انتقالی بهدستآمده از ANN در شبیهسازی اتوماتای سلولی (CA) برای پیشبینی کاربری زمین/پوشش زمین در سال ۲۰۲۸ استفاده شد. در شبیهسازی مبتنی بر CA، ترکیب و همبستگی یک سلول با سلولهای اطراف در نظر گرفته میشود. شبیهسازی مبتنی بر CA به تکرار نیاز دارد تا مشخص شود آیا یک سلول را میتوان به کلاس LULC دیگری تغییر داد یا خیر. تغییر پیکسل یا سلول از یک LULC به دیگری بستگی به یک آستانه تعریف شده توسط کاربر دارد که از ۰ تا ۱ متغیر است [ ۴۷ ]. مقدار آستانه باید به گونه ای انتخاب شود که LULC به سرعت تغییر نکند و با یک مقدار نسبتاً بزرگتر تضمین شود [ ۴۷ ]. به عبارت دیگر، مقدار کمی بزرگتر تغییر گام به گام LULC را فراهم می کند [ ۴۶ ]]. در این مطالعه، بر اساس یافتههای لی و یه (۲۰۰۲) [ ۴۷ ] و ساپوترا و لی (۲۰۱۹) [ ۴۶ ] مقدار آستانه را ۰٫۹ تعیین کردیم .
۲٫۲٫۲٫ مدل جنگل تصادفی و ارزیابی دقت
برای تهیه نقشه حساسیت زمین لغزش از مدل جنگل تصادفی استفاده شد. جنگل تصادفی یک مدل پرکاربرد در نقشهبرداری حساسیت زمین لغزش است زیرا قابلیت پیشبینی بهتری را نشان میدهد [ ۷ ، ۱۴ ، ۱۶ ، ۱۷ ، ۲۶ ]. بریمن (۲۰۰۱) [ ۴۹ ] یک مدل جنگل تصادفی را پیشنهاد کرد که مدل درخت تصمیم را بهبود می بخشد. مدل درختان تصمیم را ترکیب می کند و کلاس عضویت را بسته به حداکثر تعداد آرا مشخص می کند [ ۲۱ ]. جنگل تصادفی از تجمع بوت استرپ استفاده می کند و نمونه هایی را از مجموعه داده های آموزشی برای ایجاد درخت طبقه بندی انتخاب می کند [ ۲۱ ]]. نمونه های خارج از کیسه یا نمونه های انتخاب نشده برای تعیین خطا و اهمیت عوامل مدل استفاده می شوند [ ۷ ]. مدل جنگل تصادفی با ادغام درختان طبقه بندی فردی پیش بینی می کند [ ۲۶ ، ۵۰ ]. این مدل به دو فراپارامتر بستگی دارد: ntree یا تعداد درختان و mtry یا تعداد تقسیم گره ها. برای یک مدل پایدار، ntree می تواند یک مقدار بزرگ باشد و mtry = E/3، که در آن E تعداد متغیرهای مستقل است. در این مطالعه mtry 4 بود زیرا تعداد متغیرهای مستقل ۱۰ بود. ntree 500 و اندازه گره ۴ بود [ ۳۴ ]. ما یک اندازه گره نسبتاً کوچکتر را انتخاب کردیم. بنابراین، زمان پردازش نسبتا طولانی بود، اما درختان بزرگتر تشکیل شدند [ ۲۱]. بسته “randomForest” R 3.8 برای انجام مدل سازی تصادفی جنگل استفاده شد [ ۵۱ ].
نواحی زیر منحنیهای موفقیت و نرخ پیشبینی برای اعتبارسنجی مدل استفاده شد. مجموعه داده آموزشی برای محاسبه مساحت زیر منحنی میزان موفقیت (AUC) استفاده شد، در حالی که مجموعه داده اعتبار برای محاسبه سطح زیر نرخ پیشبینی استفاده شد. منحنی میزان موفقیت نشان میدهد که مدل چقدر رفتار مجموعه داده آموزشی را یاد میگیرد، در حالی که نرخ پیشبینی نشان میدهد که مدل چقدر میتواند زمین لغزشهای آینده را پیشبینی کند. AUC های موفقیت و نرخ های پیش بینی بین ۰٫۵ تا ۱٫۰ یا ۵۰ تا ۱۰۰ درصد است [ ۱۸ ]. دقت ۹۰-۱۰۰٪ در دسته عالی قرار می گیرد. دقت ۸۰ تا ۹۰ درصد در دسته خوب قرار می گیرد. دقت ۷۰ تا ۸۰ درصد در دسته متوسط و کمتر از ۷۰ درصد در دسته ضعیف قرار می گیرد [ ۲۰ ]]. در این مطالعه، ما از سه سناریو LULC برای تولید سه مدل حساسیت زمین لغزش استفاده کردیم. ما از زمین لغزش هایی استفاده کردیم که از سال ۲۰۰۱ تا ۲۰۱۷ رخ داد. بنابراین، در طراحی مطالعه خود، برای نقشه حساسیت زمین لغزش تولید شده با استفاده از LULC موجود، میزان موفقیت را با استفاده از مجموعه داده آموزشی محاسبه کردیم. مدل جنگل تصادفی با استفاده از داده های آموزشی برای LULC موجود و مدل ذخیره شده آموزش داده شد. برای نقشه های حساسیت زمین لغزش تولید شده با استفاده از LULC پیشنهادی و شبیه سازی شده، سناریوهای LULC را تغییر دادیم. بنابراین، برای این دو نقشه حساسیت، دقت اعتبارسنجی با استفاده از مجموعه داده اعتبارسنجی محاسبه شد. مجموعه داده اعتبارسنجی در طول فرآیند آموزش مورد استفاده قرار نگرفت و برای مدل جنگل تصادفی کاملاً جدید بود. بنابراین می توان آن را به عنوان زمین لغزش های آینده در نظر گرفت. اگرچه این رانش زمین از سال ۲۰۰۱ تا ۲۰۱۷ رخ داده است، در طول فرآیند آموزش، این زمین لغزش ها برای مدل جنگل تصادفی کاملاً ناشناخته بودند. این یک رویکرد بسیار رایج برای اعتبارسنجی یک مدل یادگیری ماشینی و همچنین بررسی صحت پیشبینی است [۲۱ ]. مدلهای یادگیری ماشینی مانند مدل جنگل تصادفی بر اساس مجموعه دادههای موجود تهیه میشوند و برای پیشبینی سناریوهای آینده استفاده میشوند. ما نمیتوانیم دادههای سناریوهای آینده را بهدست آوریم و در چنین موردی، تقسیم مجموعه دادههای موجود به مجموعههای آموزشی و آزمایشی بهترین رویکرد در نظر گرفته میشود که در آن مجموعه دادههای آزمون یا اعتبارسنجی برای اندازهگیری دقت پیشبینی استفاده میشود [ ۲۱ ]. بنابراین، در این مطالعه، برای اندازهگیری دقت پیشبینی نقشههای حساسیت زمین لغزش تولید شده با استفاده از سناریوهای پیشنهادی و شبیهسازیشده LULC، از مجموعه داده اعتبارسنجی استفاده کردیم.
۳٫ نتایج
۳٫۱٫ سناریوهای LULC
در سال ۲۰۱۸ ( شکل ۳ ب)، حدود ۴۸٫۹٪ ( جدول ۳ ) از منطقه مورد مطالعه به عنوان آب در نظر گرفته شد. پوشش گیاهی حدود ۳۶٫۵ درصد از منطقه مورد مطالعه را پوشش می دهد. درصد مساحت و اراضی بایر به ترتیب ۲/۸ و ۵/۶ درصد بود.
در LULC پیشنهادی ( شکل ۳ d)، حدود ۳۸٫۴٪ به عنوان مناطق ساخته شده یا زمین بایر تعیین شدند. بر اساس این طرح پیشنهادی، بخشی از پوشش گیاهی برای توسعه مناطق صنعتی و تجاری حذف خواهد شد. برخی از مناطق در جنوب غربی به عنوان آیش یا زمین برهنه تعیین شدند.
LULC سال ۲۰۲۸ بر اساس روند تغییر LULC از سال ۲۰۰۸ تا ۲۰۱۸ و ارتباط آن با هشت متغیر توضیحی شبیهسازی شد. از سال ۲۰۰۸ تا ۲۰۱۸، پوشش گیاهی ۱۰٫۱٪ کاهش یافت ( جدول ۳ )، در حالی که زمین های بایر ۲۷٫۰٪ افزایش یافت و سطح ساخته شده ۸۸٫۹٪ افزایش یافت. افزایش جمعیت و توسعه صنایع گردشگری دلیل افزایش شدید مساحت و کاهش پوشش گیاهی است. الگوی LULC شبیه سازی شده نشان می دهد که مساحت ساخته شده تا ۷۷٫۲٪ افزایش می یابد و زمین برهنه تا ۵۴٫۸٪ افزایش می یابد. در مقابل، پوشش گیاهی ۴٫۹٪ کاهش می یابد و بدنه های آبی به دلیل تبدیل به زمین های ساخته شده یا لخت تا ۱۹٫۸٪ کاهش می یابد.
۳٫۲٫ نقشه برداری حساسیت زمین لغزش
نمودار اهمیت متغیر ( شکل ۴ ) نشان می دهد که برای LULC موجود (۲۰۱۸)، ارتفاع (۱۰۰٫۰) مهمترین عامل علت است و به دنبال آن فاصله از خطوط گسل (۶۵٫۵)، فاصله از شبکه زهکشی (۵۵٫۴) و LULC ( 55.3). در سناریوی LULC پیشنهادی، اهمیت LULC (23.9) به اندازه سناریوی LULC موجود نبود. برای LULC شبیه سازی شده (BAU) در سال ۲۰۲۸، ارتفاع (۱۰۰٫۰) مهمترین عامل علت و به دنبال آن فاصله از شبکه های زهکشی (۵۱٫۱) و فاصله از خطوط گسل (۵۰٫۸) بود.
از آنجایی که ارتفاع مهمترین عامل علت در سناریوی LULC موجود بود ( شکل ۵مناطق با ارتفاع بیشتر در نواحی شمال غربی و جنوب غربی به عنوان زون های حساس بالا یا بسیار زیاد طبقه بندی شدند. به طور همزمان، همان مناطق نزدیک به منطقه ساخته شده به عنوان مناطق حساس بالا یا بسیار بالا طبقه بندی شدند. از سوی دیگر، مناطق نزدیک بدنه های آبی به عنوان مناطق کم حساسیت طبقه بندی شدند. برای نقشه LULC پیشنهادی، همان مناطق به عنوان مناطق حساس بالا یا بسیار بالا طبقه بندی شدند. علاوه بر این، مناطق جدید حساسیت بالا در نقشه LULC پیشنهادی در اطراف مناطق حساس بالا طبقهبندی شده در نقشه LULC موجود پخش شدند. در این سناریو، همان مناطق نزدیک بدنه های آبی و دریاچه کاپتای به عنوان مناطق حساس متوسط طبقه بندی شدند. در سناریوی LULC شبیه سازی شده ( شکل ۵مانند دو مدل قبلی، همان مناطق به عنوان مناطق حساس بالا طبقه بندی شدند و در اطراف مناطق حساس طبقه بندی شده در مدل LULC موجود پخش شدند. همانطور که در سناریوی پیشنهادی، مناطق نزدیک بدنههای آبی و دریاچه کاپتای به عنوان مناطق حساس متوسط طبقهبندی شدند، زیرا این مناطق در سناریوهای LULC پیشنهادی و شبیهسازی شده به عنوان مناطق پوشش گیاهی یا مناطق ساخته شده طبقهبندی شدند. در مقابل، این مناطق به عنوان بدنه های آبی در LULC موجود با احتمال زمین لغزش کم طبقه بندی شدند.
در سناریوی LULC موجود ( جدول ۴ )، ۲۰٫۲ درصد از منطقه به عنوان یک منطقه حساس بالا طبقه بندی شد. با این حال، مناطق حساس بالا ۲۸٫۷٪ و ۳۴٫۲٪ در سناریوهای LULC پیشنهادی و شبیه سازی شده افزایش یافته است. در سناریوی LULC موجود، ۲۲٫۴٪ ( جدول ۵ ) از منطقه ساخته شده تحت منطقه حساسیت بسیار بالا قرار می گیرد، در حالی که در سناریوی LULC پیشنهادی، ۲۷٫۱٪ از منطقه ساخته شده تحت منطقه حساسیت بسیار بالا قرار می گیرد. در سناریوی BAU، ۴۲٫۴ درصد از منطقه ساخته شده منطقه حساس خواهد بود. برای هر دو سناریو پیشنهادی و BAU، زمین برهنه در منطقه حساس بسیار بالا تقریباً ۱۰۰٫۰ درصد افزایش خواهد یافت، زیرا از ۳۳٫۲ درصد به ۶۷٫۸ درصد برای سناریوی پیشنهادی و ۶۵٫۴ درصد برای سناریوی BAU افزایش خواهد یافت.
موفقیت ( جدول ۶ ) (۸۸٫۹٪) و نرخ های پیش بینی (۸۲٫۷٪) برای LULC موجود بیشتر از دو سناریوی LULC دیگر بود. نرخهای پیشبینی برای سناریوهای فعلی و پیشنهادی LULC نسبتاً بالاتر (بیش از ۸۰٪) از نرخ برای سناریوی شبیهسازی شده (۲۰۲۸) (<80.0٪) بود.
۴٫ بحث
در این مطالعه، ما تأثیر LULC بر نقشهبرداری حساسیت زمین لغزش در شهرداری رانگاماتی را بر اساس سه سناریو LULC ارزیابی کردیم. LULC مهمترین عامل برای زمین لغزش در منطقه مورد مطالعه ما نیست. با این حال، ماهیت دینامیکی آن می تواند بر حساسیت زمین لغزش تأثیر بگذارد [ ۲۶ ]. علاوه بر این، LULC به خوبی برنامه ریزی شده می تواند افزایش مناطق حساس را محدود کند، و سناریوی تجاری معمول ممکن است شرایط را تشدید کند [ ۱۹ ]. بنابراین، تغییر LULC بر حساسیت زمین لغزش در آینده تأثیر می گذارد. مطالعه ما نشان داد که ارتفاع مهمترین عامل علت است ( شکل ۴) در منطقه مورد مطالعه از آنجایی که مردم می خواهند فعالیت های انسان زایی مانند توسعه زیرساخت ها را در مناطقی که ارتفاع کم است انجام دهند. علاوه بر این، با افزایش ارتفاع، احتمال زمین لغزش افزایش می یابد. سپس، پس از یک ارتفاع خاص به دلیل ساختار سنگ و شرایط ژئومورفیک، احتمال کاهش می یابد [ ۲۶ ]. در منطقه مورد مطالعه، بالاترین ارتفاع ۱۹۵ متر است. با توجه به وجود دریاچه کاپتای در شرق; بیشتر فعالیت های انسان زایی در شمال و جنوب غربی منطقه مورد مطالعه متمرکز شده است. بنابراین، در این مناطق، ارتفاع نقش تعیین کننده ای در زمین لغزش داشت. از سوی دیگر، نقش LULC ( شکل ۴) در سناریوهای مختلف متغیر بود. برای سناریوی LULC شبیه سازی شده و موجود نسبتاً حیاتی تر از سناریوی LULC پیشنهادی بود. این نشان می دهد که در سناریوی پیشنهادی، LULC برنامه ریزی شده تاثیر تغییر LULC بر حساسیت زمین لغزش را کاهش می دهد.
مدل جنگل تصادفی نشان داد که حساسیت زمین لغزش برای هر دو سناریو LULC پیشنهادی و شبیهسازی شده افزایش مییابد، اما این افزایش در سناریوی پیشنهادی کمتر است. این نشان می دهد که سناریوی LULC پیشنهادی پایدارتر از سناریوی BAU است. اگرچه حساسیت زمین لغزش در LULC پیشنهادی در نظر گرفته نشده است، قوانین و مقررات برنامه ریزی شهری اعمال شده برای LULC پیشنهادی، افزایش حساسیت زمین لغزش را کاهش می دهد. همانطور که قبلا ذکر شد، در LULC پیشنهادی، مساحت زیر بناهای ساخته شده افزایش می یابد، اما مناطق جدید ساخته شده تنها در مناطق با شیب ملایم پیشنهاد می شود. در مقابل، BAU به روند گذشته تغییر LULC وابسته است. اگر روند تغییر LULC ادامه یابد، LULC احتمالاً حساسیت زمین لغزش را بسیار بالاتر خواهد برد. تغییرات زمین های ساخته شده و لخت برای سناریوهای پیشنهادی و BAU مشابه هستند. در BAU، تجزیه و تحلیل در سطح پیکسل انجام شد که منجر به تغییرات پراکندهتر شد. در مقابل، LULC پیشنهادی مبتنی بر برداری بود، با مناطق بزرگ و پیوسته که برای یک نوع LULC منفرد تعیین شده بود. به عنوان مثال، بخش جنوب غربی منطقه مورد مطالعه شامل چهار نوع LULC در سناریوی BAU است، اما تنها دو نوع LULC در LULC پیشنهادی.
BAU درصد مناطق تحت مناطق حساس بالا را در سناریوهای آینده افزایش خواهد داد. همچنین بدیهی است که مناطق حساس جدید در اطراف مناطق حساس از قبل طبقه بندی شده در نقشه حساسیت زمین لغزش موجود بر اساس LULC سال ۲۰۱۸ گسترش خواهند یافت. در عوض، آنها در اطراف مکان های قبلی پخش خواهند شد.
مطالعات قبلی نشان داده اند که LULC نقش اساسی در تعیین حساسیت زمین لغزش در این منطقه دارد [ ۲۳ ، ۳۷ ]. مطالعه ما مطالعات قبلی را تایید کرد و پیشنهاد کرد که تاثیر LULC در سناریوهای آینده افزایش خواهد یافت. کیفیت نقشه حساسیت زمین لغزش به کیفیت و دقت فهرست زمین لغزش و عوامل علت بستگی دارد [ ۴ ، ۲۲ ].]. در این مطالعه از ۶۵ مکان لغزش برای آموزش و اعتبارسنجی مدل ها استفاده شد. این زمین لغزش ها در سال ۲۰۱۷ رخ داده است و بیشتر زمین لغزش ها در نزدیکی شهرک ها و زیرساخت های دیگر مانند شبکه های جاده ای بوده است. از آنجایی که این رانش زمین خسارات زیربنایی و تلفات جانی به بار آورد، در روزنامه ها و گزارش های دولتی گزارش شد. برای کاهش سوگیری، عواملی مانند فاصله از شبکه راه را از مدل حذف کردیم. به دلیل فقدان دادههای بارندگی با وضوح بالا و نقشه دقیق زمینشناسی، بارش و زمینشناسی بهعنوان عوامل علت در نقشهبرداری حساسیت زمین لغزش لحاظ نشدهاند.
بارش به عنوان یک عامل علت در نقشه برداری حساسیت زمین لغزش در نظر گرفته می شود، در حالی که بارندگی به عنوان یک عامل محرک در توسعه سیستم های هشدار اولیه زمین لغزش در نظر گرفته می شود [ ۵۲ ]] که موضوع این مطالعه نیست. منطقه مورد مطالعه از نظر اندازه کوچک است و هیچ گونه تغییر مکانی در میانگین بارندگی سالانه وجود ندارد، بنابراین نشان می دهد که میانگین بارندگی سالانه بر حساسیت زمین لغزش تأثیری نخواهد داشت. با این حال، در منطقه مورد مطالعه، بیشتر زمین لغزش ها توسط بارندگی ایجاد می شود. این بدان معناست که عوامل سببی شرایط مساعدی را برای زمین لغزش ایجاد می کنند و عوامل محرکی مانند بارندگی آغازگر رویدادهای زمین لغزش هستند. مطالعه ما تنها تأثیر تغییر LULC بر حساسیت زمین لغزش را با این فرض که همه عوامل دیگر بدون تغییر هستند ارزیابی کرد. ما تصدیق می کنیم که سایر عوامل پویا نیز ممکن است بر سناریوی حساسیت زمین لغزش تأثیر بگذارند. اگر الگوی میانگین بارندگی سالانه به دلیل تغییر اقلیم در آینده تغییر کند، حساسیت زمین لغزش را تحت تأثیر قرار خواهد داد. در منطقه مطالعه ما، رانش زمین عمدتاً توسط باران شدید ایجاد می شود و تغییرات آب و هوایی ممکن است منجر به رویدادهای کم و بیش شدید باران شود. مطالعات بیشتری برای ارزیابی تأثیر تغییرات آب و هوایی بر حساسیت زمین لغزش و نقش تغییر بارندگی به عنوان یک عامل محرک مورد نیاز است.
۵٫ نتیجه گیری ها
در نقشه برداری حساسیت زمین لغزش، عوامل ژئومورفیک و فیزیوگرافی مانند شیب، جهت، انحنای پلان، انحنای پروفیل و زمین شناسی ایستا هستند. از سوی دیگر، LULC یک عامل پویا مرتبط با فعالیت های انسانی است. ما تأثیر تغییر LULC بر حساسیت زمین لغزش را بر اساس سه سناریو ارزیابی کردیم: الگوهای LULC موجود، پیشنهادی و شبیهسازی شده. مدل جنگل تصادفی نشان داد که به دلیل تغییر LULC، حساسیت زمین لغزش افزایش مییابد و در نتیجه درصد ناحیه حساس بالا نیز افزایش مییابد. همه مدل ها دقت رضایت بخشی (> 80.0٪) را در میزان موفقیت و پیش بینی نشان دادند. حساسیت آینده زمین لغزش همچنان در حال تغییر خواهد بود، با گسترش مناطق جدید با حساسیت بالا در اطراف مناطق با حساسیت بالا. عمدتاً در نواحی شهری و مناطق با ارتفاع زیاد در شمال و جنوب شرق منطقه مورد مطالعه. یک برنامه مدیریت LULC مناسب باید برای به حداقل رساندن افزایش مناطق حساس بالا اجرا شود. این مطالعه نشان داد که مناطق جدید حساس به احتمال زیاد در اطراف مناطق با حساسیت بالا پراکنده خواهند شد. یک سیاست مدیریت LULC مناسب برای کاهش افزایش مناطق حساس ضروری است.
این مطالعه به دلیل در دسترس نبودن داده ها، از عوامل علی مانند زمین شناسی، بارندگی و ویژگی های خاک در نقشه برداری حساسیت زمین لغزش استفاده نکرد. ما همچنین تغییرات آب و هوایی را در ارزیابی در نظر نگرفتیم. بنابراین، نقشه های حساسیت زمین لغزش تولید شده ممکن است دارای سوگیری و عدم قطعیت باشد. کار آینده برای گنجاندن عوامل بیشتری در ارزیابی و ارزیابی تأثیر تغییر اقلیم بر حساسیت زمین لغزش ضروری است.
نتایج ما نشان میدهد که سناریوی LULC پیشنهادی ممکن است افزایش نسبتاً کمتری در حساسیت زمین لغزش نسبت به سناریوی BAU داشته باشد. با این حال، مشخص نیست که آیا LULC پیشنهادی حساسیت زمین لغزش را به حداقل می رساند یا خیر. بنابراین، بررسی سناریوهای مختلف LULC برای به حداقل رساندن حساسیت زمین لغزش در برنامه ریزی و مدیریت LULC مهم است.
منابع
- رایشنباخ، پ. روسی، ام. Malamud، BD; میهیر، م. Guzzetti، F. مروری بر مدلهای حساسیت زمین لغزش مبتنی بر آمار. Earth-Sci. Rev. ۲۰۱۸ , ۱۸۰ , ۶۰-۹۱٫ [ Google Scholar ] [ CrossRef ]
- سامیا، ج. تم، ا. برگت، آ.ک. والینگا، جی. استیوور، جی. گوزتی، اف. آردیزون، اف. Rossi, M. پیاده سازی وابستگی مسیر زمین لغزش در مدل سازی حساسیت زمین لغزش. زمین لغزش ۲۰۱۸ ، ۱۵ ، ۲۱۲۹-۲۱۴۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فال، آر. کرومیناس، جی. بونارد، سی. کاسینی، ال. لروی، ای. راهنمای Savage، WZ برای حساسیت زمین لغزش، منطقه بندی خطر و خطر برای برنامه ریزی کاربری زمین. مهندس جئول ۲۰۰۸ ، ۱۰۲ ، ۹۹-۱۱۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوزتی، اف. موندینی، AC; کاردینالی، م. فیوروچی، اف. سانتانجلو، ام. نقشههای موجودی چانگ، KT لغزش: ابزارهای جدید برای یک مشکل قدیمی. Earth-Sci. Rev. ۲۰۱۲ , ۱۱۲ , ۴۲-۶۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سگونی، س. پاپافیکو، جی. لوتی، تی. Catani، F. ارزیابی حساسیت زمین لغزش در تنظیمات زمین شناسی پیچیده: حساسیت به اطلاعات زمین شناسی و بینش در پارامترسازی آن. رانش زمین ۲۰۲۰ ، ۱۷ ، ۲۴۴۳-۲۴۵۳ . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوزتی، اف. سالواتی، پ. استارک، CP ارزیابی خطر برای جمعیت ناشی از خطرات طبیعی در ایتالیا. در مدیریت ریسک زمین لغزش ; Hungr, O., Fell, R., Couture, R., Eberhardt, E., Eds. گروه تیلور و فرانسیس: لندن، انگلستان، ۲۰۰۵; صص ۳۸۱-۳۸۹٫ [ Google Scholar ]
- زو، تبر; میائو، ی. لیو، جی. بای، اس. زنگ، سی. ما، تی. Hong, H. یک رویکرد مبتنی بر شباهت برای نمونهبرداری از دادههای غیبت برای نقشهبرداری حساسیت زمین لغزش با استفاده از روشهای داده محور. Catena ۲۰۱۹ , ۱۸۳ , ۱۰۴۱۸۸٫ [ Google Scholar ] [ CrossRef ]
- دوو، جی. یونس، AP; مرغدی، ع. شیرزادی، ع. نگوین، اچ. حسین، ی. آوتار، ر. چن، ی. فام، بی تی؛ یاماگیشی، اچ. استراتژیهای نمونهگیری مختلف برای پیشبینی حساسیت زمین لغزش با یادگیری عمیق کمتر نتیجه میدهند. علمی کل محیط. ۲۰۲۰ , ۷۲۰ , ۱۳۷۳۲۰٫ [ Google Scholar ] [ CrossRef ]
- آیالو، ال. یاماگیشی، H. کاربرد رگرسیون لجستیک مبتنی بر GIS برای نقشهبرداری حساسیت زمین لغزش در کوههای Kakuda-Yahiko، ژاپن مرکزی. ژئومورفولوژی ۲۰۰۵ ، ۶۵ ، ۱۵-۳۱٫ [ Google Scholar ] [ CrossRef ]
- Nefeslioglu، HA; گوکچ اوغلو، سی. Sonmez, H. ارزیابی استفاده از رگرسیون لجستیک و شبکههای عصبی مصنوعی با استراتژیهای نمونهگیری مختلف برای تهیه نقشههای حساسیت زمین لغزش. مهندس جئول ۲۰۰۸ ، ۹۷ ، ۱۷۱-۱۹۱٫ [ Google Scholar ] [ CrossRef ]
- بای، ایکس. مک آلیستر، RR; Beaty، RM; تیلور، ب. سیاست و حکمرانی شهری در یک محیط جهانی: سیستمهای پیچیده، عدم تطابق مقیاس و مشارکت عمومی. Curr. نظر. محیط زیست حفظ کنید. ۲۰۱۰ ، ۲ ، ۱۲۹-۱۳۵٫ [ Google Scholar ] [ CrossRef ]
- رگمی، NR; جیاردینو، جی آر. مک دونالد، ای وی. Vitek, JD مقایسه مدل های مبتنی بر رگرسیون لجستیک حساسیت به زمین لغزش در غرب کلرادو، ایالات متحده. زمین لغزش ۲۰۱۴ ، ۱۱ ، ۲۴۷-۲۶۲٫ [ Google Scholar ] [ CrossRef ]
- بودیمیر، MEA؛ اتکینسون، PM؛ لوئیس، HG بررسی سیستماتیک نقشهبرداری احتمال زمین لغزش با استفاده از رگرسیون لجستیک. زمین لغزش ۲۰۱۵ ، ۱۲ ، ۴۱۹-۴۳۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، دبلیو. Xie، X. وانگ، جی. پرادان، بی. هونگ، اچ. Bui، DT; دوان، ز. Ma، J. یک مطالعه مقایسه ای از درخت مدل لجستیک، جنگل تصادفی، و طبقه بندی و مدل های درخت رگرسیون برای پیش بینی فضایی حساسیت زمین لغزش. Catena ۲۰۱۷ ، ۱۵۱ ، ۱۴۷-۱۶۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، اس. لی، آر. وانگ، اف. Iio، A. ویژگیهای زمین لغزشهای زمینلرزه سال ۲۰۱۸ هوکایدو ایبوری شرقی، شمال ژاپن. رانش زمین ۲۰۱۹ ، ۱۶ ، ۱۶۹۱-۱۷۰۸ . [ Google Scholar ] [ CrossRef ]
- Rabby، YW; Li, Y. فهرست زمین لغزش (۲۰۰۱-۲۰۱۷) مناطق تپه ای چیتاگونگ، بنگلادش. داده ۲۰۲۰ ، ۵ ، ۴٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دیکشیت، ا. پرادان، بی. علمری، AM مسیرها و چالشهای کاربرد هوش مصنوعی در مدلسازی مخاطرات زمین گندوانا رس. ۲۰۲۱ ، ۱۰۰ ، ۲۹۰-۳۰۱٫ [ Google Scholar ] [ CrossRef ]
- Althuwaynee، OF; پرادان، بی. پارک، HJ; Lee, JH یک مجموعه جدید تابع باور شواهد آماری دو متغیره با فرآیند سلسله مراتب تحلیلی مبتنی بر دانش و رگرسیون لجستیک آماری چند متغیره برای نقشهبرداری حساسیت زمین لغزش. کاتنا ۲۰۱۴ ، ۱۱۴ ، ۲۱-۳۶٫ [ Google Scholar ] [ CrossRef ]
- رایشنباخ، پ. موندینی، AC; Rossi، M. تأثیر تغییر کاربری زمین بر پهنه بندی حساسیت زمین لغزش: سایت آزمایش حوضه بریگا (مسینا، ایتالیا). محیط زیست مدیریت ۲۰۱۴ ، ۵۴ ، ۱۳۷۲-۱۳۸۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- عابدینی، م. ارزیابی مدل های LNRF، FR و AHP در شاخص نگاشت حساسیت به زمین لغزش: مطالعه تطبیقی حوزه آبخیز نوژیان در استان لرستان، ایران. محیط زیست علوم زمین ۲۰۱۸ ، ۷۷ ، ۴۰۵٫ [ Google Scholar ] [ CrossRef ]
- جیمز، جی. ویتن، دی. هستی، تی. تبشیرانی، ر . مقدمه ای بر یادگیری آماری ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، ۲۰۱۳; جلد ۱۱۲، ص. ۱۸٫ [ Google Scholar ]
- کانوال، س. عاطف، س. شفیق، M. نقشهبرداری حساسیت زمین لغزش مبتنی بر GIS از مناطق شمالی پاکستان، مطالعه موردی حوضههای شیگر و شیوک. Geomat. نات. خطر خطرات ۲۰۱۷ ، ۸ ، ۳۴۸-۳۶۶٫ [ Google Scholar ] [ CrossRef ]
- عابدین، ج. Rabby، YW; حسن، من. آکتر، اچ. بررسی ویژگی ها، علل و پیامدهای زمین لغزش ۱۳ ژوئن ۲۰۱۷ در منطقه رانگاماتی بنگلادش. Geoenviron. Disasters ۲۰۲۰ , ۷ , ۲۳٫ [ Google Scholar ] [ CrossRef ]
- ژنت، ام. کوکوتسه، ن. استوکس، آ. فورکاد، تی. کای، ایکس. جی، جی. Mickovski، S. تقویت ریشه در مزارع Cryptomeria japonica D. Don: اثر سن درخت و ساختار توده بر پایداری شیب. برای. Ecol. مدیریت ۲۰۰۸ ، ۲۵۶ ، ۱۵۱۷-۱۵۲۶٫ [ Google Scholar ] [ CrossRef ]
- Persichillo، MG; بردونی، م. میسینا، سی. بارتلتی، سی. جیانچینی، آر. آوانزی، ج.ا. گالانتی، ی. سیواسکو، آ. براندولینی، پی. Galve، JP; و همکاران تحلیل حساسیت زمین لغزش کم عمق در رابطه با سناریوهای کاربری زمین. در زمین لغزش ها و شیب های مهندسی شده. تجربه، تئوری و عمل ؛ CRC Press: بوکا راتون، فلوریدا، ایالات متحده آمریکا، ۲۰۱۸؛ صفحات ۱۶۰۵-۱۶۱۲٫ [ Google Scholar ]
- چن، ال. گوا، ز. یین، ک. Shrestha، DP; جین، اس. تأثیر کاربری زمین و تغییر پوشش زمین بر حساسیت زمین لغزش: مطالعه موردی در شهر ژوشان، شهرستان ژوان ان (هوبئی، چین). نات. سیستم خطرات زمین. علمی ۲۰۱۹ ، ۱۹ ، ۲۲۰۷–۲۲۲۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Meneses، BM; پریرا، اس. Reis, E. اثرات داده های مختلف کاربری و پوشش اراضی بر پهنه بندی حساسیت زمین لغزش شبکه های جاده ای. نات. سیستم خطرات زمین. علمی ۲۰۱۹ ، ۱۹ ، ۴۷۱-۴۸۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لوتی، تی. سگونی، س. کاتانی، اف. منافو، م. Casagli، N. ادغام داده های آب بندی خاک سنجش از دور در نقشه برداری حساسیت زمین لغزش. Remote Sens. ۲۰۲۰ , ۱۲ , ۱۴۸۶٫ [ Google Scholar ] [ CrossRef ]
- لیو، جی. وو، زی. Zhang، H. تجزیه و تحلیل تغییرات در حساسیت زمین لغزش با توجه به استفاده از زمین بیش از ۳۸ سال در Lixian شهرستان، چین. پایداری ۲۰۲۱ ، ۱۳ ، ۱۰۸۵۸٫ [ Google Scholar ] [ CrossRef ]
- مائو، دی. Cherkauer، KA اثرات تغییر کاربری زمین بر پاسخ های هیدرولوژیکی در منطقه دریاچه های بزرگ. جی هیدرول. ۲۰۰۹ ، ۳۷۴ ، ۷۱-۸۲٫ [ Google Scholar ] [ CrossRef ]
- دنگ، JS; وانگ، ک. هونگ، ی. Qi، JG پویایی فضایی-زمانی و تکامل تغییر کاربری زمین و الگوی منظر در پاسخ به شهرنشینی سریع. Landsc. طرح شهری. ۲۰۰۹ ، ۹۲ ، ۱۸۷-۱۹۸٫ [ Google Scholar ] [ CrossRef ]
- کریمی، ف. کشمش.؛ بابکان، ع. Suthaharan، S. مدلسازی گسترش شهری با استفاده از الگوریتم درخت تصمیم پیشرفته. GeoInformatica ۲۰۱۹ ، ۲۵ ، ۷۱۵–۷۳۱٫ [ Google Scholar ] [ CrossRef ]
- حسن، اس.اس. Sarmin، NS; Miah، MG ارزیابی تغییرات کاربری زمین مبتنی بر سناریو در مناطق تپه چیتاگونگ بنگلادش. محیط زیست توسعه دهنده ۲۰۲۰ ، ۳۴ ، ۱۰۰۴۶۳٫ [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. Xie، X. پنگ، جی. شهابی، ح. هونگ، اچ. Bui، DT; دوان، ز. لی، اس. ارزیابی حساسیت زمین لغزش مبتنی بر AX GIS با استفاده از یک رویکرد ترکیبی جدید از روش جنگل تصادفی مبتنی بر آماری دو متغیره. Catena ۲۰۱۸ ، ۱۶۴ ، ۱۳۵-۱۴۹٫ [ Google Scholar ] [ CrossRef ]
- احمد، ب. نقشهبرداری حساسیت زمین لغزش با استفاده از تکنیکهای ارزیابی چند معیاره در منطقه شهری چیتاگونگ، بنگلادش. زمین لغزش ۲۰۱۵ ، ۱۲ ، ۱۰۷۷-۱۰۹۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Rabby، YW; Li, Y. یک رویکرد یکپارچه برای نقشهبرداری زمین لغزش در مناطق تپهای چیتاگونگ، بنگلادش، با استفاده از Google Earth و نقشهبرداری میدانی. رانش زمین ۲۰۱۹ ، ۱۶ ، ۶۳۳-۶۴۵ . [ Google Scholar ] [ CrossRef ]
- رحمان، ام اس; احمد، بی. دی، ال. شروع زمین لغزش و مدلسازی حساسیت روانی در زمینه برش تپه و شهرنشینی سریع: رویکرد ترکیبی وزن شواهد و چند معیار فضایی. J. Mt. Sci. ۲۰۱۷ ، ۱۴ ، ۱۹۱۹-۱۹۳۷٫ [ Google Scholar ] [ CrossRef ]
- پروتوم الو. Rangamati Landslide Death Toll 118. 2017. موجود آنلاین: https://en.prothomalo.com/bangladesh/news/151605/Rangamati-Landslide-death-toll-118 (در ۲۲ ژانویه ۲۰۱۹ قابل دسترسی است).
- اداره آمار بنگلادش (BBS). سرشماری نفوس ۲۰۱۱، Rangamati ; وزارت برنامه ریزی: داکا، بنگلادش، ۲۰۱۱٫
- Rabby، YW; حسین، MB; عابدین، جی. نقشهبرداری حساسیت زمین لغزش در سه اوپازیلا از ناحیه تپه رانگاماتی بنگلادش: کاربرد و مقایسه روشهای یادگیری ماشین مبتنی بر GIS. Geocarto Int. ۲۰۲۰ ، ۱–۲۴٫ [ Google Scholar ] [ CrossRef ]
- Anderson, JR A سیستم طبقه بندی کاربری و پوشش زمین برای استفاده با داده های سنسور از راه دور . دفتر چاپ دولت ایالات متحده: واشنگتن، دی سی، ایالات متحده آمریکا، ۱۹۷۶; جلد ۹۶۴٫
- دوان، AM; یاماگوچی، ی. تغییر کاربری زمین و پوشش زمین در داکای بزرگ، بنگلادش: استفاده از سنجش از دور برای ترویج شهرنشینی پایدار. Appl. Geogr. ۲۰۰۹ ، ۲۹ ، ۳۹۰-۴۰۱٫ [ Google Scholar ] [ CrossRef ]
- بالله، م.م. رحمان، م.م. عابدین، ج. آکتر، اچ. تغییر پوشش زمین و تأثیر آن بر درگیری انسان و فیل: موردی از ذخیرهگاه جنگلی فاشیاخالی در بنگلادش. SN Appl. علمی ۲۰۲۱ ، ۳ ، ۶۴۹٫ [ Google Scholar ] [ CrossRef ]
- لیلسند، تی. کیفر، RW; چیپمن، جی. سنجش از دور و تفسیر تصویر . جان وایلی و پسران: هوبوکن، نیوجرسی، ایالات متحده آمریکا، ۲۰۱۵٫ [ Google Scholar ]
- گیسموندی، م. کاموسوکو، سی. فورویا، تی. تومیمورا، اس. مایا، M. MOLUSCE – تحلیلگر تغییر کاربری زمین منبع باز برای QGIS. ۲۰۱۴٫ در دسترس آنلاین: https://www.ajiko.co.jp/download/pdf_tf2014/p62-63.pdf (در ۸ نوامبر ۲۰۲۱ قابل دسترسی است).
- ساپوترا، MH; لی، HS پیش بینی تغییر کاربری زمین و پوشش زمین برای سوماترای شمالی، اندونزی، با استفاده از خودکار سلولی مبتنی بر شبکه عصبی مصنوعی. پایداری ۲۰۱۹ ، ۱۱ ، ۳۰۲۴٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لی، ایکس. بله، اتوماتای سلولی مبتنی بر شبکه عصبی AGO برای شبیه سازی چندین تغییر کاربری زمین با استفاده از GIS. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۲ ، ۱۶ ، ۳۲۳-۳۴۳٫ [ Google Scholar ] [ CrossRef ]
- براونلی، جی. تاثیر نرخ یادگیری بر عملکرد شبکه عصبی را درک کنید. تسلط بر یادگیری ماشین. ۲۰۱۹٫ در دسترس آنلاین: https://books.google.co.kr/books?hl=ko&lr=&id=DOamDwAAQBAJ&oi=fnd&pg=PP1&dq=Brownlee,+J.+Understand+the+inpact+of+learning+rate+on +عصبی+شبکه+عملکرد،+Machine+Learning+Mastery+2019&ots=3rwsdJEJER&sig=1T5FcUq3hDxbg8v5QIUgfZ8KlL0#v=onepage&q&f=false (در ۸ نوامبر ۲۰۲۱ قابل دسترسی است).
- بریمن، L. جنگل های تصادفی. ماخ فرا گرفتن. ۲۰۰۱ ، ۴۵ ، ۵-۳۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فام، بی تی؛ پراکاش، آی. دو، جی. سینگ، SK; Trinh، PT; Tran، HT; Le, TM; ون فونگ، تی. خوی، DK; شیرزادی، ع. و همکاران یک رویکرد ترکیبی جدید از مدلسازی حساسیت زمین لغزش با استفاده از مجموعه جنگل چرخشی و طبقهبندیکنندههای پایه مختلف. Geocarto Int. ۲۰۲۰ ، ۳۵ ، ۱۲۶۷-۱۲۹۲٫ [ Google Scholar ] [ CrossRef ]
- لیاورد، ا. وینر، ام. طبقه بندی و رگرسیون توسط جنگل تصادفی. R News ۲۰۰۲ , ۲ , ۱۸-۲۲٫ [ Google Scholar ]
- احمد، بی. رحمان، ام اس; ساموندز، پی. اسلام، ر. Uddin, K. کاربرد فناوریهای مکانی در توسعه یک سیستم هشدار زودهنگام زمین لغزش پویا در یک زمینه بشردوستانه: بحران پناهندگان روهینگیا در بازار کاکس، بنگلادش. Geomat. نات. خطر خطرات ۲۰۲۰ ، ۱۱ ، ۴۴۶-۴۶۸٫ [ Google Scholar ] [ CrossRef ]
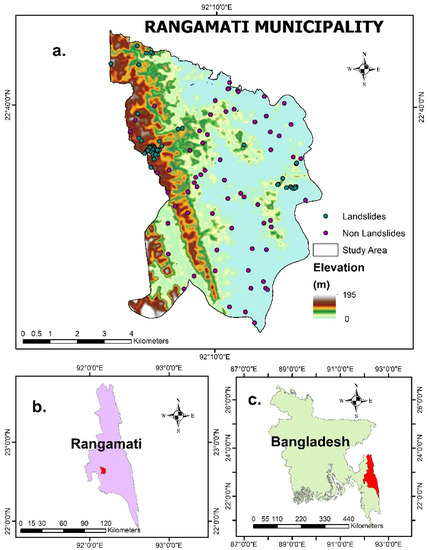
شکل ۱٫ موقعیت شهرداری رانگاماتی در منطقه رانگاماتی، بنگلادش: ( الف ) شهرداری رانگاماتی. ( ب ) موقعیت شهرداری رنگاماتی در ناحیه رنگاماتی. ( ج ) موقعیت منطقه Rangamati در بنگلادش.
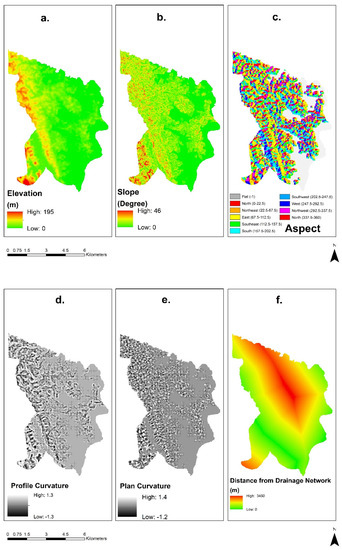
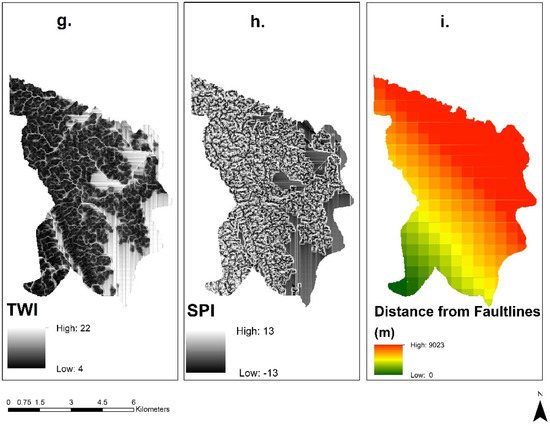
شکل ۲٫ عوامل علّی نسبتاً پایدار: ( الف ) ارتفاع، ( ب ) شیب، ( ج ) جنبه، ( د ) انحنای پلان، ( ه ) انحنای پروفیل، ( f ) فاصله از شبکه زهکشی، ( گرم ) TWI، ( h ) SPI، ( i ) فاصله از خطوط گسل.
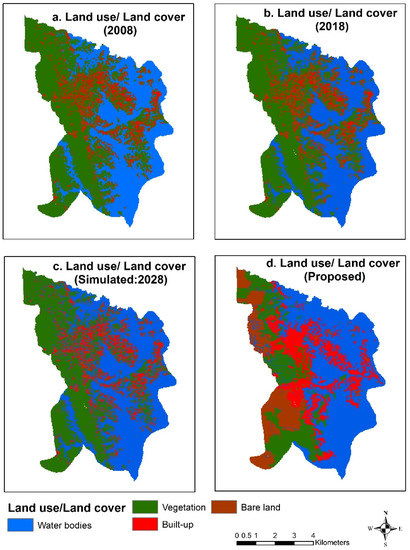
شکل ۳٫ نقشههای کاربری/پوشش زمین (عوامل پویای پویایی): ( الف ) کاربری زمین/پوشش زمین در سال ۲۰۰۸، ( ب ) LULC سال ۲۰۱۸، ( ج ) LULC شبیهسازی شده (۲۰۲۸)، ( د ) کاربری اراضی/زمین پیشنهادی پوشش دادن.
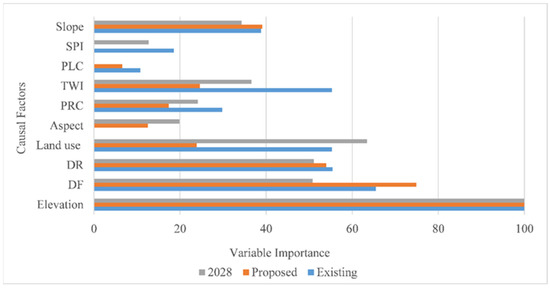
شکل ۴٫ نمودار اهمیت متغیر برای مدلهای جنگل تصادفی بر اساس سه سناریو LULC (SPI = شاخص توان جریان؛ PLC = انحنای پلان؛ TWI = شاخص رطوبت توپوگرافی؛ PRC = انحنای پروفیل؛ DR = فاصله از زهکشی؛ DF = فاصله از خطوط گسل ).
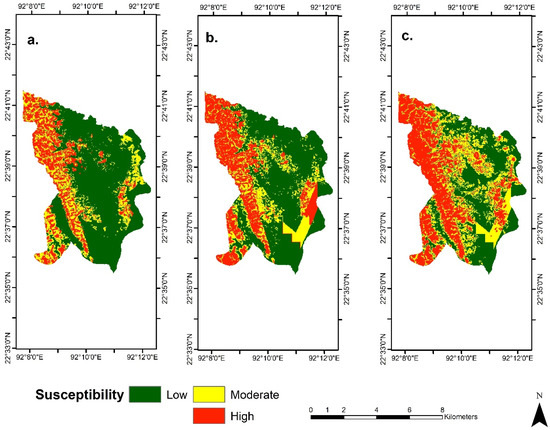
شکل ۵٫ نقشه های حساسیت زمین لغزش بر اساس جنگل تصادفی: ( الف ) کاربری زمین/پوشش زمین موجود، ( ب ) کاربری زمین/پوشش زمین پیشنهادی، ( ج ) کاربری اراضی/پوشش زمین شبیه سازی شده برای سال ۲۰۲۸٫