کلید واژه ها:
بهینه سازی مکان ؛ ایستگاه رادار VTS ; شعاع پوشش متغیر ; انسداد محیطی ; تضعیف رادار
۱٫ مقدمه
۲٫ آثار مرتبط
-
روشی برای قضاوت انسداد محیطی ناشی از موانع در فضای سه بعدی پیشنهاد شده است.
-
روشی برای ارزیابی تضعیف رادار در فضای سه بعدی پیشنهاد شده است.
-
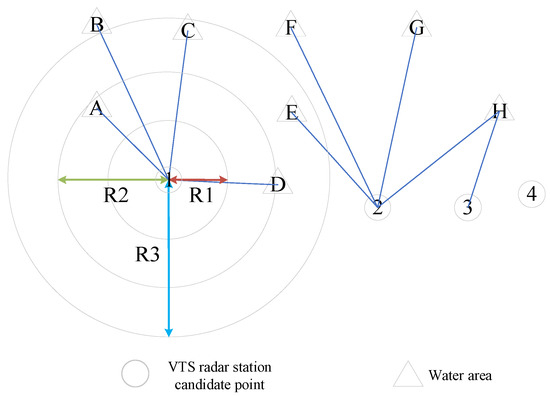
با در نظر گرفتن این واقعیت که رادار به صورت دایره ای کار می کند، یک مدل بهینه سازی مکان ایستگاه راداری VTS بر اساس مدل پوشش ساخته شده است.
۳٫ شرح مشکل
۳٫۱٫ شرح مشکل
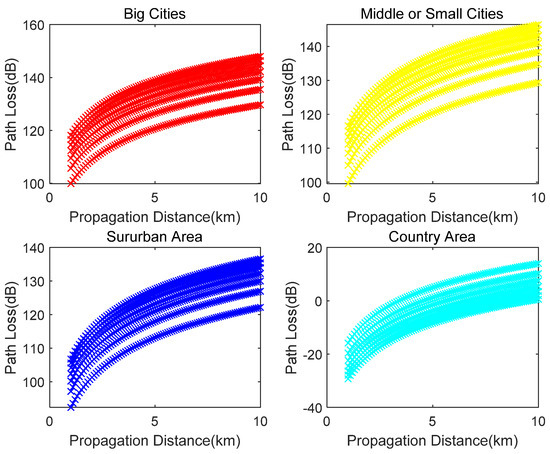
۳٫۲٫ ارزیابی تضعیف رادار
از دست دادن مسیر برای به هم ریختگی شهری:
از دست دادن مسیر برای به هم ریختگی حومه شهر:
از دست دادن مسیر برای کشور باز است:
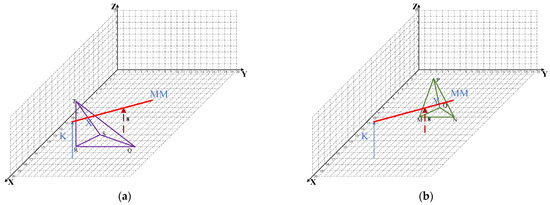
۳٫۳٫ روش قضاوت و ارزیابی انسداد محیطی
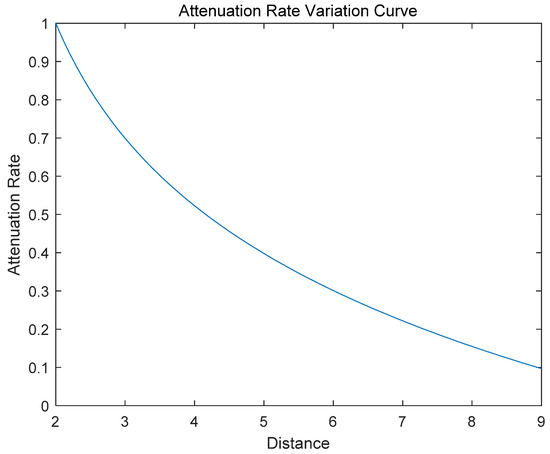
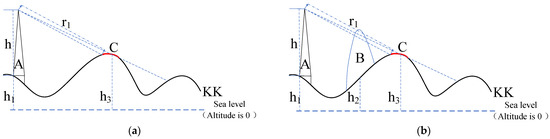
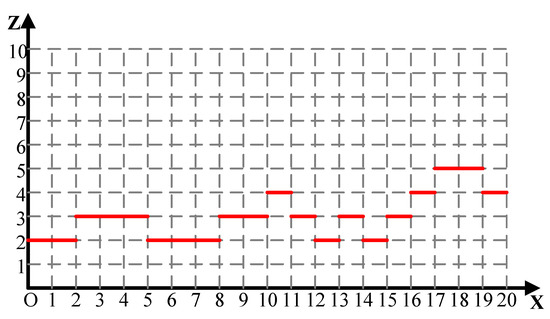
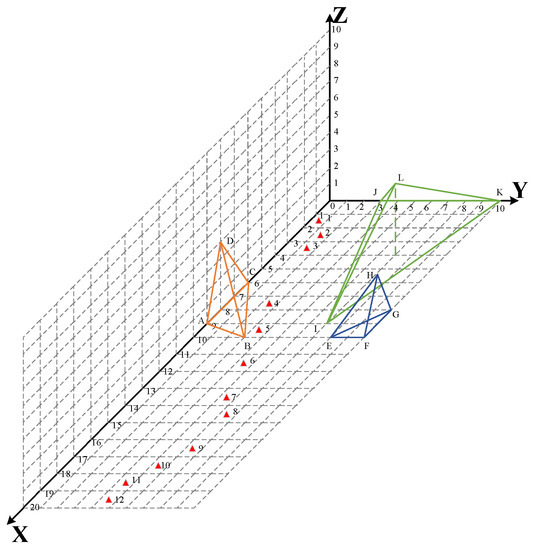
در شکل ۴ ، ایستگاه رادار A، مانع B و منطقه آبی C وجود دارد. ارتفاعات مربوطه عبارتند از ، ، و . ارتفاع هر ایستگاه رادار است . حداقل و حداکثر شعاع پوشش رادار در نظر گرفته شده است و . فاصله اقلیدسی در فضای دو بعدی بین A و C است . شکل ۴ a شرایطی را نشان می دهد که هیچ مانعی بین A و C وجود ندارد. منطقه آبی C قرار است تحت نظارت و تحت پوشش ایستگاه رادار A قرار گیرد. بین است و ، در غیر این صورت نیست. میزان پوشش ایستگاه رادار توسط تابع تضعیف رادار محاسبه می شود. شکل ۴ ب شرایطی را نشان می دهد که یک مانع B بین A و C وجود دارد. همچنان می توانیم قضاوت کنیم که آیا منطقه آبی C مانند قبل تحت نظارت و پوشش قرار دارد یا خیر، اما به دلیل وجود مانع B، اثر نظارت ایستگاه رادار تحت تأثیر قرار می گیرد. و میتوانیم بدانیم که مانع B در عمل نمیتواند امواج الکترومغناطیسی را کاملاً مسدود کند، بنابراین این مقاله نرخ نفوذ متفاوتی را به موانع مختلف اختصاص میدهد. هنگامی که امواج الکترومغناطیسی از طریق موانع در فرآیند انتقال منتشر می شود، روش محاسبه نرخ پوشش ایستگاه رادار به صورت معادله (۶) توصیف می شود. نشان دهنده نرخ پوشش ایستگاه رادار A به منطقه آب C زمانی است که امواج الکترومغناطیسی از طریق مانع B منتشر نمی شوند، که توسط تابع تضعیف رادار محاسبه می شود. نرخ نفوذ مانع B است، نتیجه نهایی میزان پوشش ایستگاه رادار A به منطقه آبی C با توجه به مانع B است.
۳٫۴٫ مدل ریاضی
۳٫۴٫۱٫ فرض
- (۱)
-
محیط خارجی بدون تغییر باقی می ماند، به این معنی که تعداد و ارتفاع موانع، سطح آب و نقاط بالقوه ایستگاه رادار VTS بدون تغییر باقی می مانند.
- (۲)
-
تعداد، مساحت جغرافیایی و ارتفاع مناطق آبی سرپوشیده مشخص است.
- (۳)
-
تعداد کل و ارتفاع نقاط کاندید ایستگاه رادار VTS بالقوه مشخص است.
- (۴)
-
انواع و پارامترهای دقیق رادار و ارتفاع ایستگاه رادار مشخص است.
- (۵)
-
تعداد و میزان نفوذ موانع و همچنین فرمول تابع تضعیف از قبل مشخص شده است.
۳٫۴٫۲٫ فرمول مسأله
- (۱)
-
محاسبه نرخ پوشش
میزان پوشش رادار VTS به منطقه آب با در نظر گرفتن وجود موانع در منطقه اطراف با معادله (۷) محاسبه می شود. سپس ماتریس نرخ پوشش ایستگاه رادار به کل مناطق آبی را بر اساس فاصله اقلیدسی در فضای سه بعدی می توان به دست آورد.
- (۲)
-
محاسبه نرخ پوشش منطقه
نرخ پوشش هر منطقه آبی با استفاده از یک رویکرد موازی برای به دست آوردن ماتریس نرخ پوشش، همانطور که در رابطه (۸) ارائه شده است، تعیین می شود.
- (۳)
-
ساخت مدل
توابع هدف:
محدودیت ها:
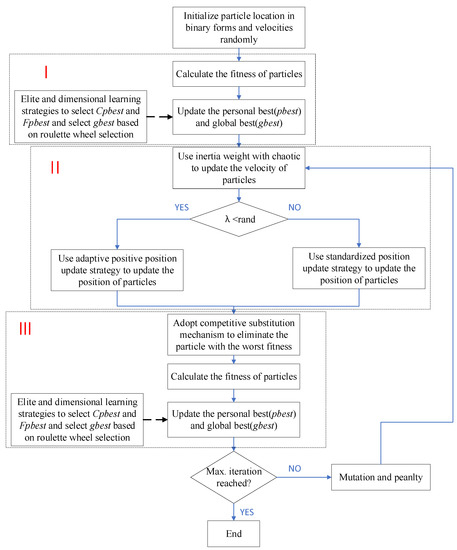
۴٫ شرح الگوریتم
۵٫ نتایج تجربی
۵٫۱٫ تحلیل عددی
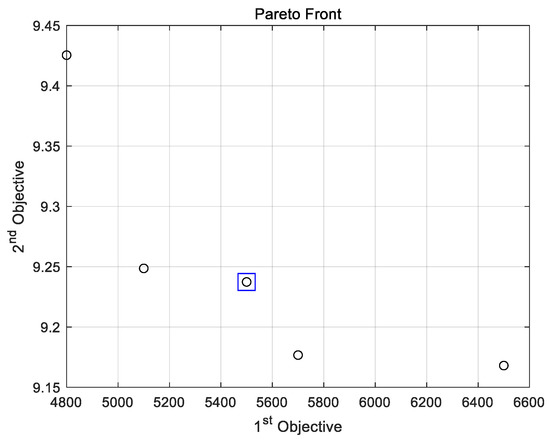
از پارامترهای زیر در الگوریتم ها استفاده می شود: تکرار = ۱۰۰، popsize = 100، طول = ۲۱ × ۲۱ = ۴۴۱، حد بالایی ذرات غیر غالب در آرشیو خارجی ۵۰، wmax = 0.9، wmin = 0.4، مقدار اضافی مقدار بسیار بزرگ p = ۱۰ ۶ است، و نرخ جهش μ برابر با ۰٫۴ است. با توجه به اینکه ساخت مدل بر اساس حداکثر پوشش و پوشش مجموعه است، تعیین تعداد اولیه ایستگاه های رادار VTS برای ساخت بسیار مهم است. پس از تلاش های متعدد در اجرای الگوریتم، تنها زمانی که عدد اولیه بزرگتر یا مساوی ۴ باشد، می توان محدودیت های مدل را برآورده کرد، علاوه بر این، عدد اولیه باید کمتر از ۸ باشد که تعداد مناطق آبی است، در غیر این صورت، ادامه این بهینه سازی بی معنی است. بنابراین، فرض می کنیم که تعداد ایستگاه های رادار VTS ساخته شده در بازه زمانی [۴، ۷] باشد و برنامه مکان یابی نهایی را با توجه به بهینه نهایی از آرشیو خارجی بدست آوریم.
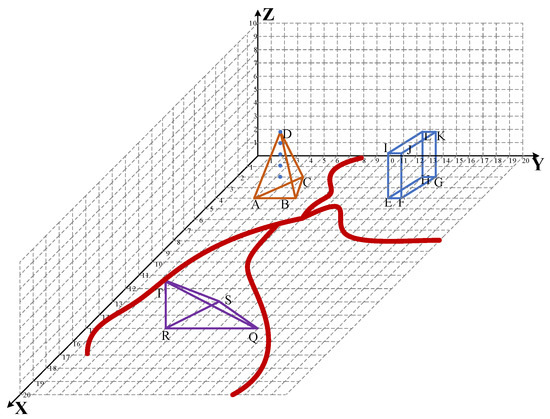
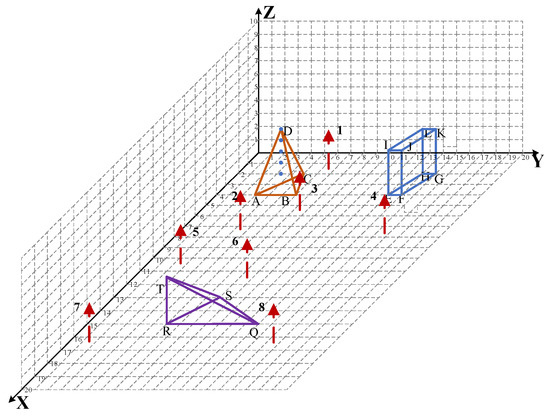
۵٫۲٫ مطالعه موردی
۶٫ نتیجه گیری
نمادها
| مجموعه و ماتریس | |
| مجموعه ای از منطقه آب | |
| مجموعه ای از نقاط کاندید ایستگاه رادار VTS | |
| مجموعه ای از نوع رادار VTS | |
| مجموعه ای از موانع | |
| ماتریس فاصله اقلیدسی بین مناطق آب و نقاط نامزد در فضای سه بعدی | |
| ماتریس نرخ پوشش بین مناطق آبی و نقاط کاندید | |
| مولفه های | |
| تعداد دفعات مساحت آب تحت پوشش قرار گیرد | |
| آستانه تعداد دفعات مساحت آب | |
| نرخ پوشش مساحت منطقه آبی | |
| منطقه جغرافیایی ناحیه آبی | |
| کل مساحت جغرافیایی منطقه آبی | |
| هزینه ساخت ثابت نامزد ایستگاه رادار | |
| هزینه پیکربندی نوع رادار | |
| احتمال پایش نامزد ایستگاه راداری زمانی که نوع رادار پیکربندی شده است | |
| حداقل شعاع موثر رادار | |
| حداکثر شعاع موثر رادار | |
| تابع تضعیف | |
| فاصله اقلیدسی بین ناحیه آبی و امتیاز نامزد | |
| نرخ پوشش بین منطقه آبی و امتیاز نامزد | |
| میزان نفوذ مانع | |
| متغیرهای تصمیم گیری | |
| اگر یک ایستگاه راداری در یک نقطه کاندیدای ایستگاه رادار انتخاب شده ساخته شود، متغیر باینری، برابر با ۱ است و در غیر این صورت برابر ۰ است. | |
| اگر یک ایستگاه راداری در یک نقطه کاندیدای ایستگاه رادار انتخاب شده ساخته شود، متغیر باینری، برابر با ۱ است و نوع رادار انتخاب شده است تا در همین حین پیکربندی شود و در غیر این صورت برابر با ۰ است. | |
منابع
- اداره ملی آمار جمهوری خلق چین. چین. ۲۰۲۰٫ در دسترس آنلاین: http://www.stats.gov.cn/ (در ۳ مارس ۲۰۲۲ قابل دسترسی است).
- وزارت حمل و نقل جمهوری خلق چین. چین. ۲۰۲۰٫ در دسترس آنلاین: http://www.mot.gov.cn (در ۳ مارس ۲۰۲۲ قابل دسترسی است).
- رودان، آی. فرانسیک، وی. والچیچ، ام. سامنر، ام. تشخیص زودهنگام موقعیت های برخورد کشتی در منطقه خدمات ترافیکی کشتی. حمل و نقل ۲۰۲۰ ، ۳۵ ، ۱۲۱-۱۳۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گان، LX; یو، FF; ژنگ، YZ; ژو، سی.-اچ. گائو، جی.-جی. چنگ، X.-D. تحقیق در مورد مدل سازی و شبیه سازی در تحت الشعاع تاثیر ساختمان ساحلی بر رادار خدمات ترافیک شناور Adv. مکانیک. مهندس ۲۰۱۸ , ۱۰ . [ Google Scholar ] [ CrossRef ]
- لی، جی. کیم، سی. لی، MK ارزیابی اقتصادی خدمات ترافیک کشتی (VTS): یک مطالعه ارزیابی احتمالی. مارس سیاست ۲۰۱۵ ، ۶۱ ، ۱۴۹-۱۵۴٫ [ Google Scholar ] [ CrossRef ]
- کائو، اس. تره فرنگی.؛ چانگ، ک. کو، ام.-د. یک روش منطق فازی برای جلوگیری از برخورد در سرویس ترافیک کشتی. جی. ناویگ. ۲۰۰۷ ، ۶۰ ، ۱۷-۳۱٫ [ Google Scholar ] [ CrossRef ]
- سو، سی ام؛ چانگ، کی. Cheng، CY تصمیم فازی در مورد اقدامات جلوگیری از برخورد بهینه برای کشتیها در سرویس ترافیک کشتی. J. Mar. Sci. تکنولوژی ۲۰۱۲ ، ۲۰ ، ۳۸-۴۸٫ [ Google Scholar ] [ CrossRef ]
- Tsou، MC کشف دانش از پایگاه داده AIS برای کاربرد در VTS. جی. ناویگ. ۲۰۱۰ ، ۶۳ ، ۴۴۹-۴۶۹٫ [ Google Scholar ] [ CrossRef ]
- فرآیند تحلیل آنلاین Tsou، MC در انبار داده سیستم شناسایی خودکار برای کاربرد در خدمات ترافیک کشتی. Proc. Inst. مکانیک. مهندس بخش M J. Eng. ماریت. محیط زیست ۲۰۱۶ ، ۲۳۰ ، ۱۹۹-۲۱۵٫ [ Google Scholar ] [ CrossRef ]
- رلینگ، تی. لوئتزوفت، ام. هیلدر، اچ پی؛ Ostnes, R. چگونه اپراتورهای خدمات ترافیک کشتی با پیچیدگی کنار می آیند – فقط عملکرد انسانی عملکرد انسان را جذب می کند. نظریه. مسائل ارگون. علمی ۲۰۲۰ ، ۲۱ ، ۴۱۸-۴۴۱٫ [ Google Scholar ] [ CrossRef ]
- چن، HC; لو، HA; لی، HH ارزیابی عملکرد شغلی عملیات خدمات ترافیک کشتی با استفاده از یک فرآیند سلسله مراتبی تحلیلی و یک اندازهگیری فاصله خاکستری. J. Mar. Sci. تکنولوژی ۲۰۱۳ ، ۲۱ ، ۵۲۲-۵۳۱٫ [ Google Scholar ]
- پراتوریوس، جی. هالنگل، ای. Dahlman, J. Modeling Vessel Traffic Service برای درک انعطاف پذیری در عملیات روزمره. مسئولیت مجدد. مهندس سیستم Saf. ۲۰۱۵ ، ۱۴۱ ، ۱۰-۲۱٫ [ Google Scholar ] [ CrossRef ]
- جیا، اس. وو، ال ایکس؛ منگ، کیو. برنامه ریزی مشترک ترافیک کشتی و خلبانان در آبهای بندرگاه. ترانسپ علمی ۲۰۲۰ ، ۵۴ ، ۱۴۹۵-۱۵۱۵٫ [ Google Scholar ] [ CrossRef ]
- رلینگ، تی. Lutzhoft، ML; اوستنس، آر. Hildre, HP سهم خدمات ترافیک کشتی در همزیستی ایمن بین کشتی های خودکار و معمولی. ماریت. مدیر سیاست ۲۰۲۱; دسترسی سریع. [ Google Scholar ]
- Brodje، A. لوند، م. جنوالد، جی. Dahlman, J. بررسی اشتباهات غیر فنی در عملیات خدمات ترافیک کشتی. شناخت. تکنولوژی کار ۲۰۱۳ ، ۱۵ ، ۳۴۷-۳۵۷٫ [ Google Scholar ] [ CrossRef ]
- منسون، جی. لوتژافت، م. Brooks, B. Joint Activity in the Maritime Traffic System: Perceptions of Ship Masters, Maritime Pilots, Tug Masters, and Vessel Traffic Service Operators. جی. ناویگ. ۲۰۱۷ ، ۷۰ ، ۵۴۷-۵۶۰٫ [ Google Scholar ] [ CrossRef ]
- کاستا، NA; MacKinnon، SN عوامل ارتباطی غیر فنی در خدمات ترافیک کشتی. شناخت. تکنولوژی کار ۲۰۱۸ ، ۲۰ ، ۶۳-۷۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، اف. چن، سی. خو، جی. چانگ، دی. خو، LP عوامل علت و نشانه های خستگی انسانی مرتبط با کار در سرویس ترافیک کشتی: رویکرد وظیفه محور. جی. ناویگ. ۲۰۲۰ ، ۷۳ ، ۱۳۴۰-۱۳۵۷٫ [ Google Scholar ] [ CrossRef ]
- مالاگولی، ا. کورادینی، م. کورادینی، پ. شوت، تی. فوندا، اس. به سوی روشی برای ارزیابی عینی حجم کار شناختی: یک مطالعه آزمایشی در خدمات ترافیک کشتی (VTS) حوزه دریایی. در مجموعه مقالات سومین مجمع بین المللی IEEE در سال ۲۰۱۷ در زمینه تحقیقات و فناوری برای جامعه و صنعت (RTSI)، مودنا، ایتالیا، ۱۱ تا ۱۳ سپتامبر ۲۰۱۷؛ صص ۱-۶٫ [ Google Scholar ]
- Xu، GY; چن، CH; لی، اف. Qiu، X. تجزیه و تحلیل داده های AIS برای تغییر چرخشی تطبیقی در خدمات ترافیک کشتی. Ind. Manag. سیستم داده ۲۰۲۰ ، ۱۲۰ ، ۷۴۹-۷۶۷٫ [ Google Scholar ] [ CrossRef ]
- لی، ز. تائو، ام. کان، اچ. Wei, Q. در کنترل کامل امواج الکترومغناطیسی با متا سطوح پیشرفت می کند. Adv. انتخاب کنید Mate-Rials ۲۰۱۶ , ۴ , ۸۱۸–۸۳۳٫ [ Google Scholar ]
- Singh, Y. مقایسه مدلهای Okumura، Hata و COST-231 بر اساس از دست دادن مسیر و قدرت سیگنال. بین المللی جی. کامپیوتر. Appl. ۲۰۱۲ ، ۵۹ ، ۳۷-۴۵٫ [ Google Scholar ] [ CrossRef ]
- محمد، ف. عمرو، EK; احمد، اس. تصحیح تجربی مدل اوکومورا-هاتا برای باند ۹۰۰ مگاهرتز در مصر. در مجموعه مقالات سومین کنفرانس بین المللی ارتباطات و فناوری اطلاعات IEEE 2013، بیروت، لبنان، ۱۹ تا ۲۱ ژوئن ۲۰۱۳٫ صص ۳۸۶-۳۹۵٫ [ Google Scholar ]
- تسمیح، ع. فریحا، ج. Mannan, P. بازرسی عملکرد Picocell با استفاده از مدل های مختلف در مناطق مختلف. در مجموعه مقالات پنجمین کنفرانس بین المللی IEEE 2020 در مورد کامپیوتر و سیستم های ارتباطی، شانگهای، چین، ۲۲ تا ۲۴ فوریه ۲۰۲۰٫ [ Google Scholar ]
- محمود، ع. ضیاء، ن. حسن، ع. کاربرد مدل Okumura-Hata برای سیستم های ارتباطی بی سیم در عمان. در مجموعه مقالات کنفرانس بین المللی IEEE IOT، الکترونیک و مکاترونیک، ونکوور، BC، کانادا، ۹ تا ۱۲ سپتامبر ۲۰۲۰٫ [ Google Scholar ]
- ورا، دی. Ruslan، A. حداقل مربعات معمولی در COST 231 هاتا پارامترهای کلیدی بهینه سازی بر اساس داده های تجربی. در مجموعه مقالات کنفرانس بین المللی چندگانه IEEE 2017 در زمینه مهندسی، کامپیوتر و علوم اطلاعات، هنگ کنگ، ۱۵ تا ۱۷ مارس ۲۰۱۷٫ [ Google Scholar ]
- کیون، ی. برنده، جی. هو، ک. ردیابی پرتوی هوشمند برای پیشبینی انتشار. در مجموعه مقالات سمپوزیوم بین المللی انجمن آنتن ها و انتشارات IEEE 2012، شیکاگو، IL، ایالات متحده آمریکا، ۸ تا ۱۴ ژوئیه ۲۰۱۲٫ [ Google Scholar ]
- ژنگ، ی. Magdy، I. Ray Tracing برای مدلسازی انتشار رادیویی: اصول و کاربردها. دسترسی IEEE ۲۰۱۵ ، ۳ ، ۱۰۸۹-۱۱۰۰٫ [ Google Scholar ]
- واندرلی، پی اچ. Terada، MA ارزیابی کاربرد مدل انتشار Ikegami در سناریوهای ارتباطات بی سیم مدرن. J. الکترومگن. Waves Appl. ۲۰۱۲ ، ۲۶ ، ۱۴۸۳-۱۴۹۱٫ [ Google Scholar ] [ CrossRef ]
- سخت.؛ واتسون، AM; Chadney، AG نظر در مورد افت پراش سقف به خیابان در مدل COST 231-Walfisch-Ikegami. IEEE Trans. وه تکنولوژی ۱۹۹۹ ، ۴۸ ، ۱۴۵۱-۱۴۵۸٫ [ Google Scholar ] [ CrossRef ]
- Karatas, M. یک مشکل مکان یابی تسهیلات چند هدفه در حضور متغیر عملکرد پوشش تدریجی و پوشش تعاونی. یورو جی. اوپر. Res. ۲۰۱۷ ، ۲۶۲ ، ۱۰۴۰-۱۰۵۱٫ [ Google Scholar ] [ CrossRef ]
- وانگ، BC; کیان، QY; گائو، جی جی. قهوهای مایل به زرد، ZY; ژو، ی. بهینه سازی مکان انبار و توزیع منابع برای نجات اضطراری در شرایط عدم قطعیت. Adv. مهندس به اطلاع رساندن. ۲۰۲۱ ، ۴۸ ، ۱۰۱۲۷۸٫ [ Google Scholar ] [ CrossRef ]
- دو، بی. ژو، اچ. Leus, R. یک مدل قوی دو مرحله ای برای یک مشکل مکان تاسیسات مرکز p قابل اعتماد. Appl. ریاضی. مدل. ۲۰۱۰ ، ۷۷ ، ۹۹-۱۱۴٫ [ Google Scholar ] [ CrossRef ]
- تدسکی، دی. آندرتا، ام. الگوریتمهای دقیق جدید برای مکان پوشش حداکثر مسطح توسط مسائل بیضی. یورو جی. اوپر. Res. ۲۰۲۱ ، ۲۹۱ ، ۱۱۴-۱۲۷٫ [ Google Scholar ] [ CrossRef ]
- بارای، جی. Cliquet، G. بهینه سازی مکان ها از طریق مدل سلسله مراتبی پوشش حداکثر/p-میانگین: بیمارستان های زایمان در فرانسه. اتوبوس جی. Res. ۲۰۱۳ ، ۶۶ ، ۱۲۷-۱۳۲٫ [ Google Scholar ] [ CrossRef ]
- ویرا، BS; فراری، تی. ریبیرو، جنرال موتورز; باهینسه، ال. فیلهو، RDO؛ آبرامیدز، کالیفرنیا؛ Júnior، NFRC یک الگوریتم مبتنی بر پوشش مجموعه ترکیبی مترقی برای مشکل مکان شمارش ترافیک. سیستم خبره Appl. ۲۰۲۰ , ۱۶۰ , ۱۱۳۶۴۱٫ [ Google Scholar ] [ CrossRef ]
- Sinnl، M. الگوریتمهای دقیق و اکتشافی برای مسئله پوشش زیرماتریس حداکثر وزنی. یورو جی. اوپر. Res. ۲۰۲۱; دسترسی سریع. [ Google Scholar ]
- لی، جی ال. لیو، ZB; تعیین مکان ایستگاه شارژ عمومی Wang، XF برای وسایل نقلیه الکتریکی سواری بر اساس یک الگوریتم ژنتیک بهبودیافته. حفظ کنید. جامعه شهرها ۲۰۲۱ ، ۷۴ ، ۱۰۳۱۸۱٫ [ Google Scholar ] [ CrossRef ]
- ماریناکیس، ی. الگوریتم بهینهسازی ازدحام ذرات بهبودیافته برای مسئله مسیریابی موقعیت مکانی ظرفیتدار و مسئله مسیریابی مکان با تقاضاهای تصادفی. Appl. محاسبات نرم. ۲۰۱۵ ، ۳۷ ، ۶۸۰-۷۰۱٫ [ Google Scholar ] [ CrossRef ]
- روحانی نژاد، م. صحرائیان، ر. توکلی مقدم، ر. الگوریتم تجزیه Benders تسریع شده برای مشکلات مکان یابی تاسیسات قابل اعتماد در شبکه های چند لایه. محاسبه کنید. مهندسی صنعتی ۲۰۱۸ ، ۱۲۴ ، ۵۲۳-۵۳۴٫ [ Google Scholar ] [ CrossRef ]
- وظیفه، ر. دشموک، ن. کومار، آر. Saxena، A. توسعه و کاربرد بهینه سازی ازدحام ذرات الهام گرفته از درهم تنیدگی کوانتومی. سیستم مبتنی بر دانش ۲۰۲۱ ، ۲۱۹ ، ۱۰۶۸۵۹٫ [ Google Scholar ] [ CrossRef ]
- اسکوایرز، ام. تائو، ایکس. الانگوان، س. گوراجان، ر. Saxena، A. یک سیستم مبتنی بر الگوریتم ژنتیک جدید برای زمانبندی درمانهای پزشکی. سیستم خبره Appl. ۲۰۲۲ ، ۱۹۵ ، ۱۱۶۴۶۴٫ [ Google Scholar ] [ CrossRef ]
- خان، س. گردنیفسکی، پ. محمد، ی. Sobey, A. مزایای الگوریتمهای ژنتیکی تکاملی در بهینهسازی سفر. اقیانوس. مهندس ۲۰۲۲ ، ۲۴۵ ، ۱۱۰۲۶۱٫ [ Google Scholar ] [ CrossRef ]
- زنگ، ز. ژانگ، ام. هنگ، ز. ژانگ، اچ. Zhu، H. افزایش تکامل دیفرانسیل با استراتژی جایگزینی بردار هدف. محاسبه کنید. ایستادن. رابطها ۲۰۲۲ ، ۸۲ ، ۱۰۳۶۳۱٫ [ Google Scholar ] [ CrossRef ]
- مورایس، م. ریبیرو، ام. سیلوا، آر. ماریانى، وی. کوئلیو، L. فراابتکاری تکامل دیفرانسیل گسسته برای مشکلات زمانبندی جریان جایگشت. محاسبه کنید. مهندسی صنعتی ۲۰۲۲ ، ۱۶۶ ، ۱۰۷۹۵۶٫ [ Google Scholar ] [ CrossRef ]
- جعفری، ع. پناهی، م. غلامی، د. رحمتی، ا. شهابی، ح. شیرزادی، ع. لی، اس. Bui، DT; پرادهان، ب. بهینهسازی هوش گروهی روش گروهی مدیریت دادهها با استفاده از الگوریتمهای جستجوی فاخته و بهینهسازی نهنگ برای مدلسازی و پیشبینی زمین لغزشها. Appl. محاسبات نرم. ۲۰۲۲ ، ۱۱۶ ، ۱۰۸۲۵۴٫ [ Google Scholar ] [ CrossRef ]
- پنگ، جی. لی، ی. کانگ، اچ. شن، ی. سان، ایکس. چن، Q. تاثیر توپولوژی جمعیت بر بهینه سازی ازدحام ذرات و انواع آن: دیدگاه انتشار اطلاعات. Swarm Evol. محاسبه کنید. ۲۰۲۲ ، ۶۹ ، ۱۰۰۹۹۰٫ [ Google Scholar ] [ CrossRef ]
- کوی، ی. منگ، ایکس. Qiao, J. الگوریتم بهینهسازی ازدحام ذرات چند هدفه بر اساس مکانیزم دو آرشیو. Appl. محاسبات نرم. ۲۰۲۲ , ۱۱۹ , ۱۰۸۵۳۲٫ [ Google Scholar ] [ CrossRef ]
- سینگ، اس. Bansal، J. بهینه ساز گرگ خاکستری مبتنی بر جهش با مکانیسم جستجوی اصلاح شده. سیستم خبره Appl. ۲۰۲۲ ، ۱۹۴ ، ۱۱۶۴۵۰٫ [ Google Scholar ] [ CrossRef ]
- آدیکاری، ج. Acharyaya، S. بهینه ساز متوازن گرگ خاکستری تصادفی (RBGWO) برای حل مسائل بهینه سازی زندگی واقعی. Appl. محاسبات نرم. ۲۰۲۲ , ۱۱۷ , ۱۰۸۴۲۹٫ [ Google Scholar ] [ CrossRef ]
- بومدین، ن. Borobi, S. تاشو پروتئین در مدل HP شبکه سه بعدی با استفاده از ترکیب جستجوی فاخته با الگوریتم های Hill-Climbing. Appl. محاسبات نرم. ۲۰۲۲ ، ۱۱۹ ، ۱۰۸۵۶۴٫ [ Google Scholar ] [ CrossRef ]
- باجاج، AO Sangwan الگوریتم های جستجوی فاخته گسسته برای اولویت بندی مورد آزمایشی. Appl. محاسبات نرم. ۲۰۲۱ ، ۱۱۰ ، ۱۰۷۵۸۴٫ [ Google Scholar ] [ CrossRef ]
- کیریاکاکیس، ن. مارینکی، م. ماتساتسینیس، ن. ماریناکیس، ی. مشکل جستجوی پهپاد پیک متحرک: یک رویکرد هوشمند چند دسته آنلاین برای عملیات جستجوی پهپاد. Swarm Evol. محاسبه کنید. ۲۰۲۱ ، ۶۶ ، ۱۰۰۹۵۶٫ [ Google Scholar ] [ CrossRef ]
- Engelbrecht، AP Computational Intelligence: An Introduction ; جان وایلی و پسران: هوبوکن، نیوجرسی، ایالات متحده آمریکا، ۲۰۰۷٫ [ Google Scholar ]
- وانگ، آر. هائو، KR؛ چن، ال. وانگ، تی. جیانگ، سی. یک بهینهسازی جدید ازدحام ذرات ترکیبی با استفاده از استراتژی تطبیقی. Inf. علمی ۲۰۲۱ ، ۵۷۹ ، ۲۳۱-۲۵۰٫ [ Google Scholar ] [ CrossRef ]