خلاصه
کلید واژه ها:
مدل رقومی ارتفاع (DEM) ; انحنای مسیر جریان ( C ) ; flow-path-network-based (FPN-based) ; flow-path-network-flow-path-curvature (FPN-C) ; خط جریان
۱٫ معرفی
۲٫ روش ها
۲٫۱٫ به دست آوردن یک شبکه مسیر جریان (FPN) با استفاده از مدل شبکه مسیر جریان
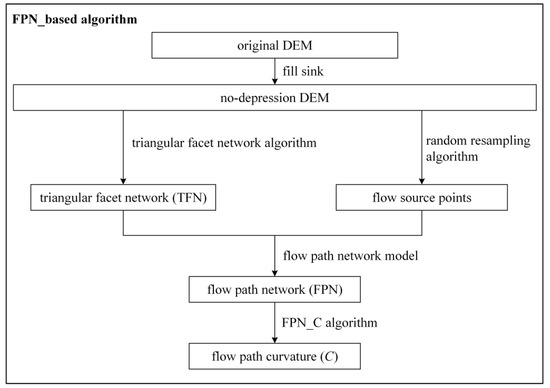
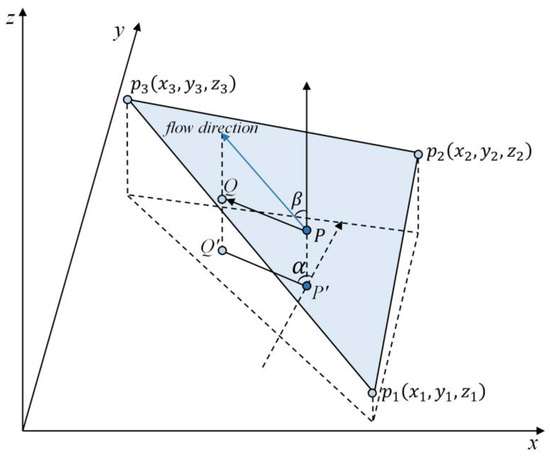
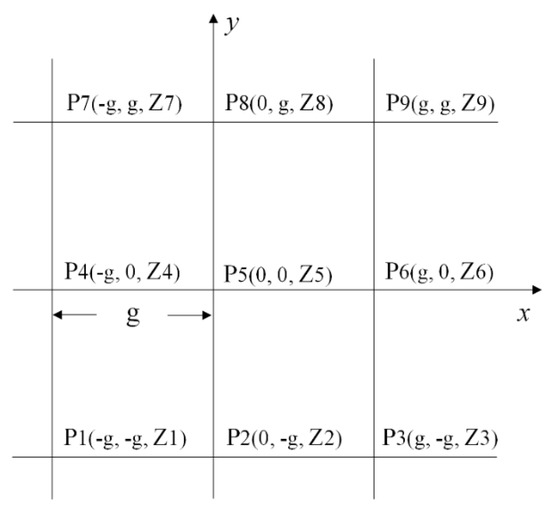
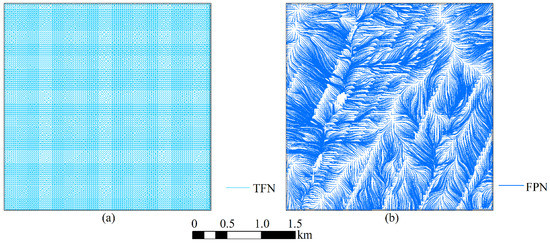
در این مقاله، شبکه مسیر جریان (FPN) توسط مدل شبکه مسیر جریان [ ۴۹ ] ردیابی می شود و مراحل دقیق آن در شکل ۱ نشان داده شده است. ابتدا، یک DEM بدون افسردگی با پر کردن سینک ها و چاله های محلی DEM اصلی به دست آمد. دوم، الگوریتم شبکه وجه مثلثی [ ۵۰ ] برای ساخت شبکه وجه مثلثی (TFN) استفاده شد. سوم، جهت جریان وجوه مثلثی بر روی TFN با جنبه و شیب آن همانطور که در شکل ۲ نشان داده شده است ، تعیین شد که با معادلات ارائه شده توسط Zhou، Pilesjö و Chen [ ۵۰ ] محاسبه شد. زمانی که مقادیر مختصات سه راس یک وجه مثلثی به صورت فرض شده بود پ۱(ایکس۱،y1،z1)، پ۲(ایکس۲،y2،z2)،و پ۳(ایکس۳،y3،z3)، معادله صفحه وجه را می توان به صورت مشخص کرد z=آ∗ایکس+ب∗y+ج. اینجا، آ، ب،و جمی توان از رابطه (۱) استخراج کرد. جنبه ( α) و شیب ( β) را می توان از رابطه (۲) به دست آورد. بنابراین، جهت جریان بر روی وجه مثلثی را می توان با بردار نشان داد که جهت و طول آن به ترتیب توسط جنبه و شیب تعیین می شود. فرآیند تخمین جهت جریان متفاوت از آنالیز زمین با استفاده از مدلهای ارتفاعی دیجیتال (TauDEM) بود. این به این دلیل است که دومی از الگوریتم جهت جریان چندگانه (D∞) برای تخمین جهت جریان استفاده می کند که به عنوان جهت تندترین شیب رو به پایین بر روی هشت وجه مثلثی در مرکز یک سلول شبکه نمایش داده می شود [ ۵۱ ]. شیب رو به پایین هر وجه مثلثی با بردار نشان داده می شود که جهت و طول آن با نسبت تغییر ارتفاع به طول در آن تعیین می شود. ایکسجهت و yجهت، به ترتیب [ ۵۲ ]. جهت جریان را با استفاده از DEM مبتنی بر شبکه به دست آورد و روش در این مقاله جهت جریان را بر اساس وجه بردار سه بعدی تخمین زد. چهارم، الگوریتم نمونه گیری مجدد تصادفی [ ۵۳ ] برای به دست آوردن نقاط منبع جریان از DEM اصلی استفاده شد. در نهایت، با ترکیب جهت جریان وجوه مثلثی بر روی TFN با نقاط منبع جریان، یک FPN بر اساس مدل شبکه مسیر جریان ردیابی شد. مراحل دقیق آن قبلاً در این مقاله توضیح داده شده است [ ۴۹ ].
۲٫۲٫ پیشنهاد یک الگوریتم FPN-C برای محاسبه انحنای مسیر جریان (C) از FPN
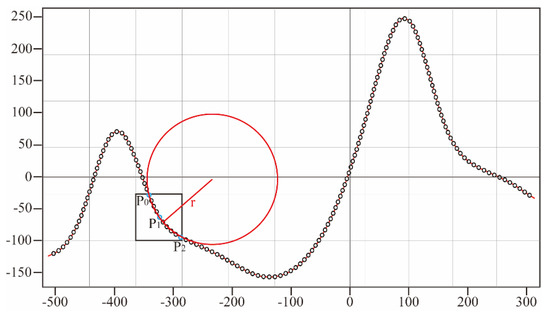
۲٫۲٫۱٫ انتخاب خط جریان مناسب برای محاسبه انحنای مسیر جریان (C)
۲٫۲٫۲٫ صاف کردن خط جریان با روش درون یابی B-Spline
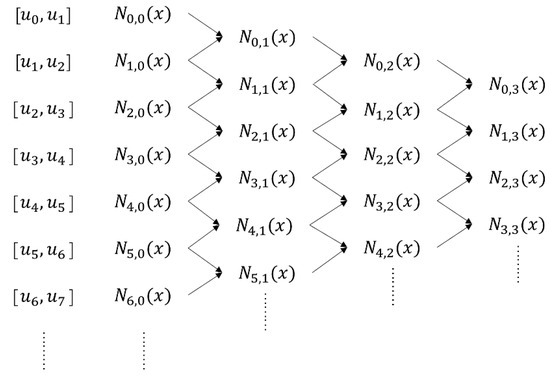
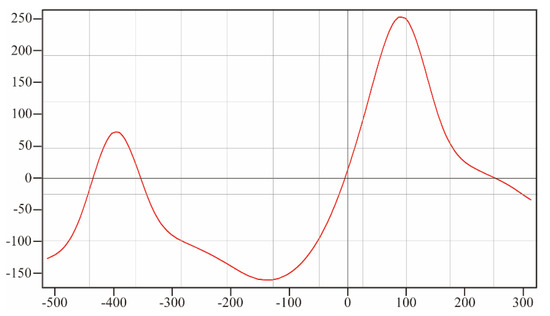
با توجه به اصل الگوریتم درون یابی B-spline مکعبی، می توانیم منحنی B-Spline را بدست آوریم. پ(تو)) که یک تابع تکه ای است، همانطور که در رابطه (۳) نشان داده شده است. اگر وجود داشت n+1نقاط و بردار گره ( U={تو۰،تو۱،…،توn+ک+۱}، (ک=۳)) برای صاف کردن منحنی استفاده می شود، یک وجود دارد nعملکرد اساسی هر تابع ( نمن،ک(ایکس)، (من=۰،۱،…،n)) را می توان به عنوان معادله (۴) تعریف کرد، و رابطه عملیاتی بین توابع اساسی در شکل ۳ نشان داده شده است . بر اساس قواعد پیوستگی درونیابی و تداوم دیفرانسیل، میتوانیم معادله (۵) را بدست آوریم. با ترکیب معادله با معادلات (۳) و (۴)، میتوانیم آن را محاسبه کنیم پ۰، پ۱، پ۲,…, پnبرای به دست آوردن پ(تو). شکل ۴ یک خط جریان هموارسازی را با روش مکعبی B-Spline نشان می دهد.
۲٫۲٫۳٫ برازش دایره با الگوریتم حداقل مربع
در این مقاله، نقاط با تقسیم مساوی خط جریان صاف کننده، مانند نقاط سیاه نشان داده شده در شکل ۵ ، به دست آمدند . برای برازش دایره از الگوریتم حداقل مربع با بیشترین تأثیر استفاده شد (فرض معادله دایره ایکس۲+y2+آ∗ایکس+ب∗y+ج=۰) توسط چندین نقطه در سلول شبکه محاسبه شده (مفروضات این نقاط است (ایکسمن،yمن)، من=۱،۲،۳،…،n). یک بار ارزش آ، ب،و جمشخص شد، دایره به دست آمد. با توجه به اصل روش حداقل مربع، می توانیم تابع هدف را به دست آوریم (همانطور که در رابطه (۶) نشان داده شده است). دایره بهینه زمانی مطابقت داده شد که تابع هدف به حداقل خود رسید، و آ، ب،و جمی توان از رابطه (۷) به دست آورد.
جایی که f(آ،ب،ج)تابع هدف را نشان می دهد، منرا نشان می دهد منتیساعتنقطه، و ایکسمن و yمنمقادیر مختصات هستند منتیساعتبه ترتیب در جهت x و جهت y اشاره کنید.
۲٫۲٫۴٫ محاسبه C توسط دایره فیتینگ
۳٫ آزمایشات
۳٫۱٫ آزمایش کمی
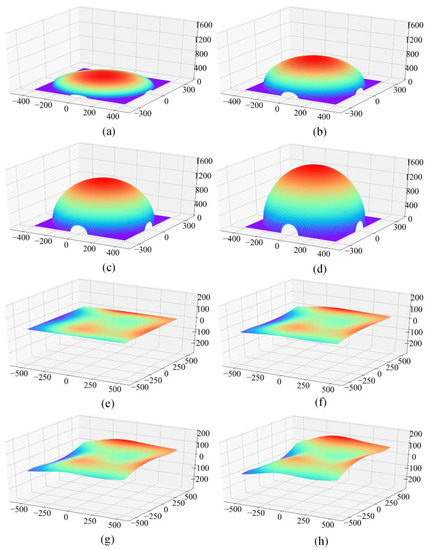
مدل سطح بیضی (معادله (۸)) و مدل سطح گاوس (معادله (۹)) [ ۶۵ ، ۶۶ ] برای تولید DEM با وضوح ۵ متر انتخاب شدند. ما از DEM های تولید شده از چهار مدل سطح بیضی (یعنی E1، E2، E3، و E4) و چهار مدل سطح گاوس (یعنی G1، G2، G3، و G4) با پیچیدگی های مختلف برای تأیید صحت روش جدید استفاده کردیم. . جدول ۱ پارامترهای هشت سطح ریاضی را نشان می دهد. انحنای مسیر جریان نظری ( C ) را می توان از فرمول های ریاضی معادلات خلاصه شده در جدول ۲ به دست آورد.
در این مقاله، DEM های ۵ متری برای به دست آوردن ۱۵۰۳۱ و ۴۰۰۰۰ نقطه منبع جریان به صورت تصادفی بر روی سطوح بیضی و گاوس مجدداً نمونه برداری شدند. مقادیر آستانه ۳۰، ۵۰، ۱۰۰ و ۱۵۰ متر برای قطع کردن خط جریان بر روی FPN در E1 و G1 در فرآیند انتخاب آستانه بهینه استفاده شد. در طول برازش دایره توسط الگوریتم حداقل مربع، ما اطمینان حاصل کردیم که بیش از ده نقطه در سلول شبکه محاسبه شده وجود دارد. سپس، مقدار آستانه بهینه را برای تخمین مقدار C در E2، E3، E4، G2، G3 و G4 انتخاب کردیم. در نهایت، مقدار C شبیه سازی شده با مقدار نظری مقایسه شد شبیه سازی شده با Cمقدار با ریشه میانگین خطای استاندارد (RMSE) و میانگین خطای مطلق (MAE) برای تأیید صحت آن. RMSE و MAE به صورت زیر بیان می شوند:
جایی که سیمننشان دهنده ارزش نظری است، سیمن”مقدار شبیه سازی شده را نشان می دهد، nتعداد سلول های شبکه را نشان می دهد و منرا نشان می دهد منتیساعتسلول شبکه
۳٫۲٫ الگوریتم های مقایسه
اولین روش پیشنهادی توسط ایوانز [ ۴۴ ] است. بیان سطح برازش و معادله برای محاسبه C به صورت معادله (۱۲) بیان می شود.
جایی که زمننشان دهنده ارتفاع از منتیساعتسلول شبکه
دوم روشی است که توسط Zevenbergen و Thorne [ ۴۶ ] ارائه شده است. بیان سطح برازش و معادله برای محاسبه C به صورت معادله (۱۳) بیان می شود.
جایی که زمننشان دهنده ارتفاع از منتیساعتسلول شبکه
سومین روش پیشنهاد شده توسط شاری [ ۳۵ ] است. بیان عملکردی سطح برازش و معادله برای محاسبه C به صورت معادله (۱۴) بیان می شود.
جایی که زمننشان دهنده ارتفاع از منتیساعتسلول شبکه
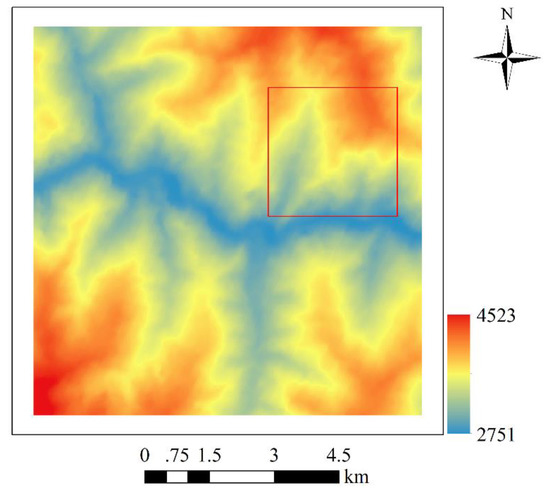
۳٫۳٫ یک برنامه دنیای واقعی
۴٫ نتایج
۴٫۱٫ ارزیابی کمی
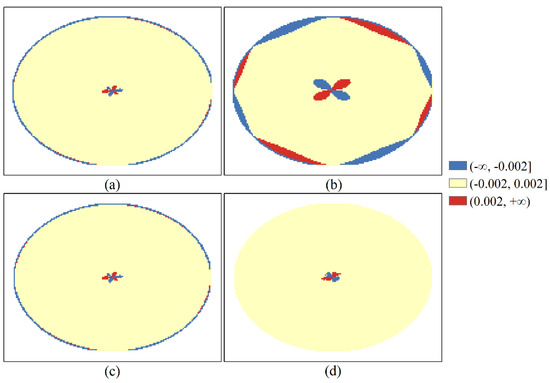
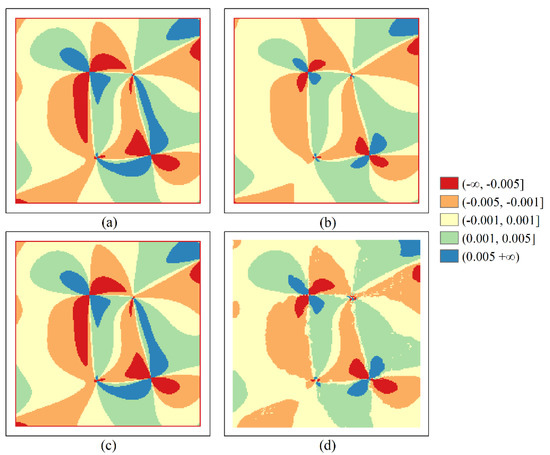
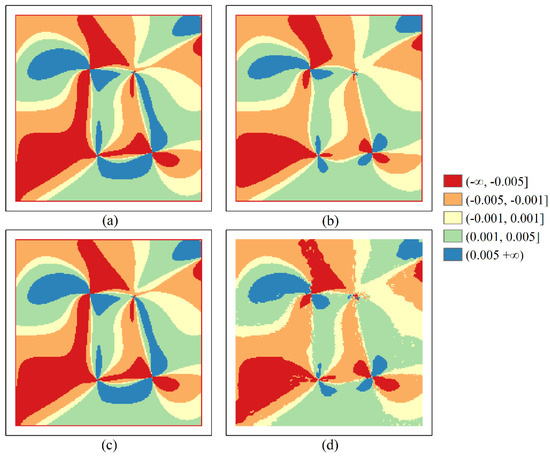
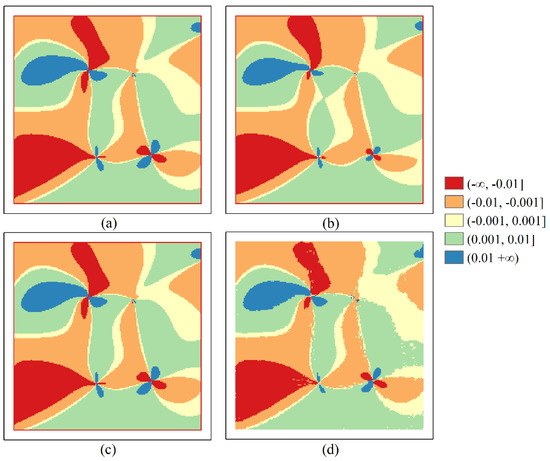
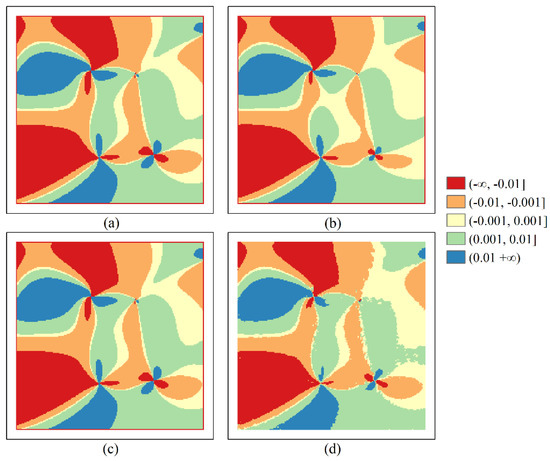
۴٫۲٫ توزیع فضایی باقیمانده ها بر روی مدل های سطح ریاضی
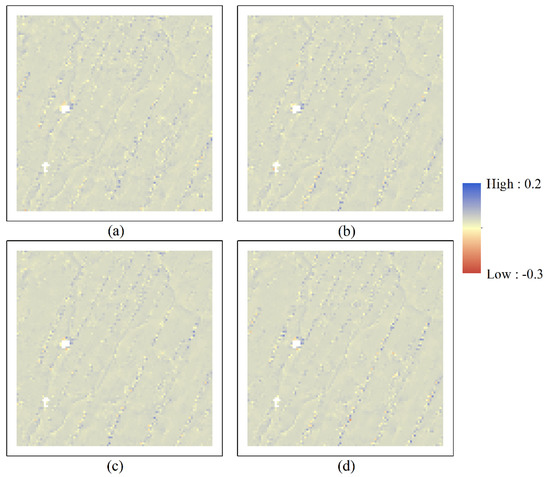
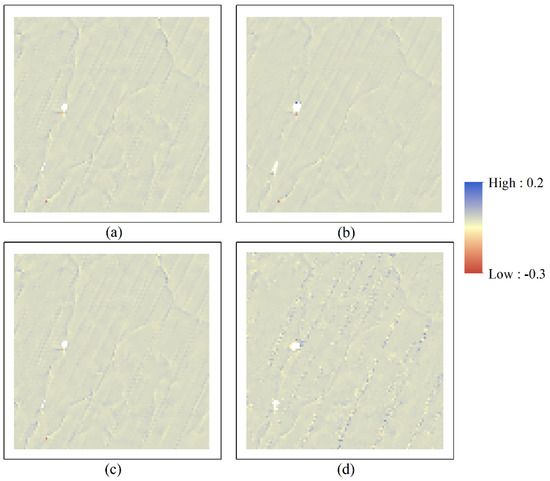
۴٫۳٫ توزیع فضایی مقادیر C در DEM دنیای واقعی
۵٫ بحث
۵٫۱٫ اندازه گیری دقت
۵٫۲٫ توزیع فضایی مناسب
۵٫۳٫ نتایج شبیه سازی سازگار
۶٫ نتیجه گیری
منابع
- کورتیس، ال. دورنکمپ، جی. گرگوری، ک. شرح نقش برجسته در مطالعات میدانی خاک. J. Soil Sci. ۱۹۶۵ ، ۱۶ ، ۱۶-۳۰٫ [ Google Scholar ] [ CrossRef ]
- Speight، J. توصیف پارامتری فرم زمین. در ارزیابی زمین: مقالات سمپوزیوم CSIRO ; استوارت، GA، اد. مک میلان: ملبورن، استرالیا، ۱۹۶۸; ص ۲۳۹-۲۵۰٫ [ Google Scholar ]
- ژو، Q. لیو، ایکس. تجزیه و تحلیل زمین دیجیتال . انتشارات علمی: پکن، چین، ۲۰۰۶٫ [ Google Scholar ]
- Peckham، SD Profile، طرح و انحنای ساده: یک مشتق ساده و کاربردها. در مجموعه مقالات ژئومورفومتری، ردلندز، کالیفرنیا، ایالات متحده آمریکا، ۷ تا ۱۱ سپتامبر ۲۰۱۱٫ [ Google Scholar ]
- مینار، جی. جنچو، م. ایوانز، IS; مینار، جی. کادلک، م. کرچو، ج. پاکینا، جی. بوریان، ال. Benová، A. متغیرهای ژئومورفومتریک مرتبه سوم (مشتقات): تعریف، محاسبه و استفاده از تغییرات انحناها. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۳ ، ۲۷ ، ۱۳۸۱-۱۴۰۲٫ [ Google Scholar ] [ CrossRef ]
- گلدگوف، دی. هوانگ، تی. لی، اچ. تجزیه و تحلیل زمین از پروفیل های انحنا. بین المللی J. سیستم تصویربرداری. تکنولوژی ۲۰۰۵ ، ۲ ، ۱۶۹-۱۸۲٫ [ Google Scholar ] [ CrossRef ]
- آروندل، ST; لی، دبلیو. ژو، X. اثر وضوح بر استخراج ویژگی های زمین. Peer J. Prepr. ۲۰۱۸ ، ۶ ، e27072v1. [ Google Scholar ] [ CrossRef ]
- جنی، بی. جنی، اچ. Hurni، L. تعمیم زمین با اهرام چند مقیاس محدود شده توسط انحنا. کارتوگر. Geogr. Inf. علمی ۲۰۱۱ ، ۳۸ ، ۱۱۰-۱۱۶٫ [ Google Scholar ] [ CrossRef ]
- Safanelli، JL; Poppiel، RR; رویز، LFC؛ Bonfatti، BR; Mello، FAdo; ریزو، آر. Demattê، تجزیه و تحلیل زمین JAM در موتور Google Earth: روشی اقتباس شده برای تجزیه و تحلیل در مقیاس جهانی با کارایی بالا. ISPRS Int. J. Geo-Inf. ۲۰۲۰ ، ۹ ، ۴۰۰٫ [ Google Scholar ] [ CrossRef ]
- Xia، X. لیانگ، Q. یک مدل جدید با میانگین عمق برای زمین لغزشهای جریان مانند بر روی زمینهای پیچیده با انحناها و شیبهای تند. مهندس جئول ۲۰۱۸ ، ۲۳۴ ، ۱۷۴-۱۹۱٫ [ Google Scholar ] [ CrossRef ]
- وو، جی. بله، ال. وو، سی. چانگ، Q. شین، ز. ژانگ، سی. Zhou، H. تغییرات فضایی انحنای سر کانال در حوضه های آبخیز کوچک کوهستانی. هیدرول. Res. ۲۰۱۹ ، ۵۰ ، ۱۲۵۱-۱۲۶۶٫ [ Google Scholar ] [ CrossRef ]
- ناگاونی، سی. کومار، KP; Ravibabu، MV ارزیابی TanDEMx و SRTM DEM بر روی تخمین رواناب شبیه سازی شده حوضه آبخیز. J. Earth Syst. علمی ۲۰۱۸ ، ۱۲۸ ، ۲٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- هوشیار، م. وانگ، دی. کیم، اس. مدیروس، SC; استخراج شبکه های هاگن، SC Valley و کانال بر اساس انحنای توپوگرافی محلی و خوشه بندی کانتورها. منبع آب Res. ۲۰۱۶ ، ۵۲ ، ۸۰۸۱-۸۱۰۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Niedda, M. ارتقاء رسانایی هیدرولیکی با استفاده از آنتروپی نمایش انحنای زمین. منبع آب Res. ۲۰۰۴ ، ۴۰ ، ۱-۱۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یو، بی. لیو، جی. لیو، کیو. هوانگ، سی. لی، H. اثرات دامنه توپوگرافی و استفاده از زمین بر تغییرپذیری فضایی رطوبت عمیق خاک در فلات نیمه خشک لس چین. هیدرول. Res. ۲۰۱۹ ، ۵۰ ، ۱۲۸۱-۱۲۹۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نگونجیری، مگاوات؛ لیبوهوا، ز. مینایی، جو؛ سرم، سی. اونز، روابط عمومی؛ Schulze، DG پیش بینی انواع خاک و خواص خاک با داده های محدود در فلات Uasin Gishu، کنیا. ژئودرما Reg. ۲۰۱۹ , ۱۵ , e00210. [ Google Scholar ] [ CrossRef ]
- هارتسوک، نیوجرسی؛ مولر، TG; کاراتاناسیس، AD; Cornelius، PL تفسیر هدایت الکتریکی خاک و تنوع صفات زمین با بررسی خاک. دقیق کشاورزی ۲۰۰۵ ، ۶ ، ۵۳-۷۲٫ [ Google Scholar ] [ CrossRef ]
- دای، ZX; Shi, XC تأثیر انحنای زمین بر فوران زغال سنگ و گاز. Meitan Xuebao/J. شرکت زغال سنگ چین ۲۰۱۲ ، ۳۷ ، ۱۵۴۱-۱۵۴۶٫ [ Google Scholar ]
- فیشر، جی تی; کوالسکی، جی. اثرات انحنای توپوگرافی Pudasaini، SP در مدلسازی کاربردی بهمن. قانون سرد. علمی تکنولوژی ۲۰۱۲ ، ۷۴-۷۵ ، ۲۱-۳۰٫ [ Google Scholar ] [ CrossRef ]
- سان، ایکس. چن، جی. بائو، ی. هان، ایکس. ژان، جی. پنگ، دبلیو. نقشهبرداری حساسیت زمین لغزش با استفاده از تحلیل رگرسیون لجستیک در امتداد رودخانه جینشا و شاخههای آن در نزدیکی شهرستان Derong و Deqin، جنوب غربی چین. ISPRS Int. J. Geo-Inf. ۲۰۱۸ ، ۷ ، ۴۳۸٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Orwat, J. معادله رگرسیون خطی انحناهای زمین معدن ناشی از حفاری زغال سنگ سخت از چند درز و مقادیر تقریبی آنها با استفاده از اسپلین صاف شده. IOP Conf. سر. ماتر علمی مهندس ۲۰۱۹ , ۴۷۷ , ۰۱۲۰۴۲٫ [ Google Scholar ] [ CrossRef ]
- مارتین، آر. برابین، ال. Potter, M. حساسیت متغیرهای زمین مشتق از GIS در مقیاسهای چندگانه برای مدلسازی فعالیت stoat (Mustela erminea). Appl. Geogr. ۲۰۱۱ ، ۳۱ ، ۷۷۰-۷۷۹٫ [ Google Scholar ] [ CrossRef ]
- گومز، آر. دنتون، ا. فرانزن، دی. کمی سازی کارایی تکنیک تجمیع مبتنی بر پنجره کشویی با استفاده از مدل سازی پیش بینی بر روی ویژگی های شکل زمین مشتق شده از DEM و NDVI. ISPRS Int. J. Geo-Inf. ۲۰۱۹ ، ۸ ، ۱۹۶٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- اشمیت، جی. ایوانز، IS; Brinkmann, J. مقایسه مدل های چند جمله ای برای محاسبه انحنای سطح زمین. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۳ ، ۱۷ ، ۷۹۷-۸۱۴٫ [ Google Scholar ] [ CrossRef ]
- ایوانز، I. ژئومورفومتری عمومی. مشتقات ارتفاع و آمار توصیفی. در ژئومورفولوژی تحلیل فضایی ; Chorley، RJ، Ed. Methuen and Co.: لندن، انگلستان، ۱۹۷۲; صص ۱۷-۹۰٫ [ Google Scholar ]
- Shary, PA روش توپوگرافی انحرافات دوم. در هندسه سازه های سطح زمین ; استپانوف، IN، اد. انتشارات مرکز تحقیقات پوشچینو: پوشچینو، روسی، ۱۹۹۱; صص ۲۸-۵۸٫ [ Google Scholar ]
- Wood, JD خصوصیات ژئومورفولوژیکی مدلهای ارتفاعی دیجیتال. دکتری پایان نامه، دانشگاه لستر، لستر، انگلستان، ۱۹۹۶٫ [ Google Scholar ]
- Speight، JG یک رویکرد پارامتریک به مناطق شکل زمین. Prog. ژئومورفول. ۱۹۷۴ ، ۷ ، ۲۱۳-۲۳۰٫ [ Google Scholar ]
- پاپو، HB; Gelbman, E. مدل های زمین دیجیتال برای شیب ها و انحناها. فتوگرام مهندس Remote Sens. ۱۹۸۴ , ۵۰ , ۶۹۵-۷۰۱٫ [ Google Scholar ]
- شری، PA; شارایا، LS; میتوسوف، AV روشهای کمی بنیادی تحلیل سطح زمین. ژئودرما ۲۰۰۲ ، ۱۰۷ ، ۱-۳۲٫ [ Google Scholar ] [ CrossRef ]
- کربس، پی. استوکر، ام. Pezzatti، GB; Conedera، M. یک رویکرد جایگزین برای انحنای زمین عرضی و مشخصات. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۵ ، ۲۹ ، ۶۴۳-۶۶۶٫ [ Google Scholar ] [ CrossRef ]
- Krcho, J. Georelief به عنوان زیرسیستم منظر و تأثیر پارامترهای مورفومتریک ژئوللف بر تمایز فضایی فرآیندهای منظر-اکولوژیک. اکولوژی (CSFR) ۱۹۹۱ ، ۱۰ ، ۱۱۵-۱۵۷٫ [ Google Scholar ]
- ایوانز، IS; Cox، NJ روابط بین خواص سطح زمین: ارتفاع، شیب و انحنا. در مدلسازی فرآیند و تکامل شکل زمین. نکات سخنرانی در علوم زمین ; Hergarten, S., Neugebauer, HJ, Eds. Springer: برلین/هایدلبرگ، آلمان، ۱۹۹۹; جلد ۷۸٫ [ Google Scholar ]
- ایوانز، IS مشتقات سطح زمین: تاریخچه، محاسبه و توسعه بیشتر. در مجموعه مقالات ژئومورفومتری، نانجینگ، چین، ۱۶ تا ۲۰ اکتبر ۲۰۱۳٫ [ Google Scholar ]
- Shary, PA سطح زمین در طبقه بندی نقاط گرانشی توسط یک سیستم کامل از انحناها. ریاضی. جئول ۱۹۹۵ ، ۲۷ ، ۳۷۳-۳۹۰٫ [ Google Scholar ] [ CrossRef ]
- ماریان جنکو، جی پی. شاری، ص. اسکلت زمین و متغیرهای مورفومتریک محلی: علوم زمین و تکنیک بینایی کامپیوتر. در پیشرفت در فناوری اطلاعات جغرافیایی ; هوراک، ج.، ویرایش. Ostrava VŠB-Technical University of Ostrava: Ostrava، جمهوری چک، ۲۰۰۹٫ [ Google Scholar ]
- پرادان، ک. Guha، A. دینامیک سیالات یک انشعاب. بین المللی J. Heat Fluid Flow ۲۰۱۹ , ۸۰ , ۱۰۸۴۸۳٫ [ Google Scholar ] [ CrossRef ]
- پاتاک، م. دوان، ا. داس، AK اثر انحنای خط جریان بر میدان جریان یک جت هواپیمای آشفته در جریان متقاطع. مکانیک. Res. اشتراک. ۲۰۰۷ ، ۳۴ ، ۲۴۱-۲۴۸٫ [ Google Scholar ] [ CrossRef ]
- یانگ، ایکس. تاکر، PG ارزیابی عملکرد مدل تلاطم: انحنای ساده و مقیاسهای طول انتگرال. محاسبه کنید. مایعات ۲۰۱۶ ، ۱۲۶ ، ۹۱-۱۰۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تجری، اس. Fredsøe, J. محاسبه مورفولوژی تپه. جی. ژئوفیس. Res. زمین گشت و گذار. ۲۰۰۵ ، ۱۱۰ ، F04013. [ Google Scholar ] [ CrossRef ]
- باقری، س. کبیری سامانی، ع. شبیه سازی جریان سطح آزاد بر روی سرریزهای جریان دار. Flow Meas. ساز. ۲۰۲۰ ، ۷۱ ، ۱۰۱۶۸۰٫ [ Google Scholar ] [ CrossRef ]
- فروتن، م. شرکتزاره، م. احسانی، ق، تقسیمبندی مورفومتریک نیمه خودکار سطح زمین یک منطقه خشک کوهستانی با استفاده از نقشههای DEM و خود سازماندهی. عرب جی. ژئوشی. ۲۰۱۳ ، ۶ ، ۴۷۹۵-۴۸۱۰٫ [ Google Scholar ] [ CrossRef ]
- فلورینسکی، IV دقت متغیرهای توپوگرافی محلی به دست آمده از مدل های رقومی ارتفاع. بین المللی جی. جئوگر. Inf. علمی ۱۹۹۸ ، ۱۲ ، ۴۷-۶۲٫ [ Google Scholar ] [ CrossRef ]
- ایوانز، IS یک سیستم یکپارچه از تجزیه و تحلیل زمین و نقشه برداری شیب. ز. ژئومورفول. (Suppl. Band) ۱۹۸۰ ، ۳۶ ، ۲۷۴-۲۹۵٫ [ Google Scholar ]
- Florinsky، IV محاسبه مشتقات جزئی مرتبه سوم از یک مدل ارتفاعی دیجیتال. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۹ ، ۲۳ ، ۲۱۳-۲۳۱٫ [ Google Scholar ] [ CrossRef ]
- Zevenbergen، LW; تورن، CR تجزیه و تحلیل کمی توپوگرافی سطح زمین. زمین گشت و گذار. روند. Landf. ۱۹۸۷ ، ۱۲ ، ۴۷-۵۶٫ [ Google Scholar ] [ CrossRef ]
- مور، شناسه; Gessler، PE; نیلسن، GA; پترسون، پیشبینی صفات خاک GA با استفاده از تحلیل زمین. علم خاک Soc. صبح. J. ۱۹۹۳ , ۵۷ , NP. [ Google Scholar ] [ CrossRef ]
- اشمیت، جی. دیکائو، آر. استخراج ویژگیهای ژئومورفومتریک و اشیاء از مدلهای رقومی ارتفاع – معناشناسی، روشها، نیازهای آینده. در GIS برای سیستم های سطح زمین: تجزیه و تحلیل و مدل سازی محیط طبیعی . Dikau, R., Saurer, H., Eds. Gebrüder Borntraeger Verlag: برلین، آلمان، ۱۹۹۹; صص ۱۵۳-۱۷۳٫ [ Google Scholar ]
- چن، ی. ژو، Q. لی، اس. منگ، اف. بی، ایکس. ویلسون، جی پی؛ زینگ، ز. چی، جی. لی، کیو. Zhang, C. شبیه سازی دینامیک جریان سطحی با استفاده از مدل شبکه مسیر جریان. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۴ ، ۲۸ ، ۲۲۴۲-۲۲۶۰٫ [ Google Scholar ] [ CrossRef ]
- ژو، Q. پیلسجو، پی. Chen, Y. برآورد مسیرهای جریان سطحی در یک مدل ارتفاعی دیجیتال با استفاده از یک شبکه وجه مثلثی. منبع آب Res. ۲۰۱۱ ، ۴۷ ، W07522. [ Google Scholar ] [ CrossRef ]
- Tarboton، D. تجزیه و تحلیل زمین با استفاده از مدل های رقومی ارتفاع در هیدرولوژی. در مجموعه مقالات بیست و سومین کنفرانس بین المللی کاربران ESRI، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، ۷ تا ۱۱ ژوئیه ۲۰۰۳٫ [ Google Scholar ]
- Tarboton, DG روشی جدید برای تعیین جهت جریان و نواحی شیب در مدلهای رقومی ارتفاعی شبکه. منبع آب Res. ۱۹۹۷ ، ۳۳ ، ۶۶۲-۶۷۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Kienzle، S. اثر وضوح DEM شطرنجی بر مشتقات مرتبه اول، مرتبه دوم و زمین مرکب. ترانس. GIS ۲۰۰۴ ، ۸ ، ۸۳-۱۱۱٫ [ Google Scholar ] [ CrossRef ]
- Segeth، K. خطوط پلی هارمونیک تولید شده توسط درون یابی صاف چند متغیره. محاسبه کنید. ریاضی. Appl. ۲۰۱۹ ، ۷۸ ، ۳۰۶۷–۳۰۷۶٫ [ Google Scholar ] [ CrossRef ]
- بائر، اف. گرون، ال. سملر، دبلیو. درونیابی اسپلاین تطبیقی برای معادلات همیلتون-جاکوبی-بلمن. Appl. عدد. ریاضی. ۲۰۰۶ ، ۵۶ ، ۱۱۹۶-۱۲۱۰٫ [ Google Scholar ] [ CrossRef ]
- لی، اچ. Qin، X. ژائو، دی. چن، جی. وانگ، P. روش تجزیه حالت تجربی بهبود یافته بر اساس الگوریتم درونیابی مثلثاتی مکعبی B-spline. Appl. ریاضی. محاسبه کنید. ۲۰۱۸ ، ۳۳۲ ، ۴۰۶-۴۱۹٫ [ Google Scholar ] [ CrossRef ]
- رائو، KD; قوش، س. داس، اس. Kumar، MR یک طرح طراحی تعمیم یافته مبتنی بر حساب کسری برای نوسانگر فرکانس بسیار پایین با استفاده از درون یابی اسپلاین با تحلیل حساسیت. اشتراک. علمی غیر خطی عدد. شبیه سازی ۲۰۱۹ ، ۷۹ ، ۱۰۴۹۱۷٫ [ Google Scholar ] [ CrossRef ]
- ژائو، دی. هوانگ، ز. لی، اچ. چن، جی. Wang, P. یک روش بهبودیافته EEMD بر اساس درون یابی اسپلاین کاردینال مثلثاتی مکعبی قابل تنظیم. رقم. فرآیند سیگنال ۲۰۱۷ ، ۶۴ ، ۴۱-۴۸٫ [ Google Scholar ] [ CrossRef ]
- تان، بی. هوانگ، ام. زو، س. گوا، ی. Qin, J. تشخیص و تصحیح پسزمینه طیفسنجی شکست ناشی از لیزر بر اساس روش درونیابی اسپلاین. اسپکتروشیم. Acta Part B در. Spectrosc. ۲۰۱۷ ، ۱۳۸ ، ۶۴-۷۱٫ [ Google Scholar ] [ CrossRef ]
- عثمان، م.م. محمد، ع. Hussain, A. ارزیابی سریع قابلیت انتقال موجود با استفاده از تکنیک درونیابی مکعبی. برق سیستم پاور Res. ۲۰۰۵ ، ۷۳ ، ۳۳۵-۳۴۲٫ [ Google Scholar ] [ CrossRef ]
- Sandwell، DT Biharmonic spline درونیابی داده های GEOS-3 و ارتفاع سنج SEASAT. ژئوفیز. Res. Lett. ۱۹۸۷ ، ۱۴ ، ۱۳۹-۱۴۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تورایچی، ک. موری، ر. کامادا، م. ایشیوشی، اس. یانگ، اس. بهبود کیفیت تصویر هاردکپی ویدیویی با استفاده از درون یابی Spline. سیستم محاسبه کنید. Jpn. ۱۹۸۹ ، ۲۰ ، ۱۳-۲۴٫ [ Google Scholar ] [ CrossRef ]
- لیو، ZW; چن، آر اس؛ چن، JQ نمونهبرداری تطبیقی روش درونیابی مکعبی اسپلاین برای محاسبه کارآمد RCS تک استاتیک. مایکرو. انتخاب کنید تکنولوژی Lett. ۲۰۰۸ ، ۵۰ ، ۷۵۱-۷۵۵٫ [ Google Scholar ] [ CrossRef ]
- بوسان، اس. عثمان، م.م. مسیرین، آی. محمد، ع. Hussain, A. تعیین قابلیت انتقال در دسترس با استفاده از روش رالستون که شامل تکنیک درون یابی مکعبی اسپلاین است. یورو ترانس. برق قدرت ۲۰۱۱ ، ۲۱ ، ۴۳۹-۴۶۴٫ [ Google Scholar ] [ CrossRef ]
- ژو، Q. لیو، ایکس. Sun، Y. پیچیدگی زمین و عدم قطعیت در تجزیه و تحلیل زمین دیجیتال مبتنی بر شبکه. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۶ ، ۲۰ ، ۱۱۳۷-۱۱۴۷٫ [ Google Scholar ] [ CrossRef ]
- ژو، Q. لیو، ایکس. تحلیل خطا در الگوریتمهای شیب و جنبه مبتنی بر شبکه. فتوگرام مهندس Remote Sens. ۲۰۰۴ , ۷۰ , ۹۵۷-۹۶۲٫ [ Google Scholar ] [ CrossRef ]