
از آنجا که الزامات برای ایجاد دادههای مکانی برای خدمات مبتنی بر مکان (LBS) همراه با افزایش تعداد ساختارهای پیچیده، بهویژه در مناطق شهری، تقاضا را افزایش داده است، تحقیقات محدودیتهای مدلهای داده در نمایش فضا را بازبینی کرده است. اگرچه تحقیقات و کاربردهای مربوطه به کاوش در فضاهای داخلی ادامه مییابد، بازنمایی کامل و دقیق آنها همچنان یک چالش است. فضای داخلی ساختاری سلسله مراتبی دارد، اما بر خلاف روابط توپولوژیکی آنها، مدل های داده این موضوع را نادیده گرفته اند. از آنجایی که زیرفاصله سازی روشی برای بیان این سلسله مراتب فضا ارائه می دهد، هدف ما ایجاد یک چارچوب زیرفاصله برای بیان روابط توپولوژیکی و سلسله مراتبی در سطوح مختلف فضای داخلی است. ما این کار را با بررسی سلسله مراتب سازههای فضای داخلی و چگونگی ارتباط آن با اجرای یک نمایش ساختار گره-رابطه چند سطحی (NRS) از فضای داخلی از طریق زیرفاصله انجام دادیم. علاوه بر این، ما این مفاهیم را با گسترش مدل اصلی IndoorGML رسمیت دادیم. سپس، پتانسیل چارچوب پیشنهادی را از طریق آزمایش بر روی دادههای نمونه با تولید نمایشهای شبکه مربوطه در سطوح مختلف جزئیات نشان دادیم.
کلید واژه ها:
مدل داده های توپولوژیکی ; زیرفاصله ; داده های توپولوژیکی سلسله مراتبی ; فضای داخلی
۱٫ مقدمه
گسترش خدمات مبتنی بر مکان (LBS) در زندگی روزمره انسان ها، به ویژه در مناطق شهری، همزمان با افزایش تقاضا برای اطلاعات در این مکان ها رشد کرده است. این برنامه های کاربردی LBS بر داده های مکانی تکیه می کنند که فضاهای دنیای واقعی را که شامل فعالیت های انسانی است انتزاع می کند. با این حال، تنوع و پیچیدگی فضاها چالش هایی را برای ساکنان، محققان و توسعه دهندگان برنامه ها ایجاد می کند. مدلهایی که این فضاها را نشان میدهند، پیوسته تلاش کردهاند تا اطلاعات معنایی و هندسی را تا حد امکان کامل و واقعی به دست آورند.
با این حال، کاربردهای این LBS در فضاهای داخلی مانند برنامه های کاربردی تجاری، شبکه های اجتماعی و راهنمایی مسیر برای افراد ناتوان افزایش یافته است. همانطور که خدمات ناوبری در فضاهای داخلی حیاتی تر شده اند [ ۱ ]، اطلاعات در مورد روابط فضایی در تجزیه و تحلیل توپولوژیکی موقعیت های مربوطه ضروری است. برخلاف مدلهای پیشنهادی قبلی مبتنی بر اصول اولیه هندسی، ساختار رابطه گره (NRS) امکان بیان صریح فضاها و روابط توپولوژیکی آنها را از طریق ساختار گراف فراهم میکند [ ۲ ]. این مدل اساس IndoorGML [ ۳]. این امر به تسریع مطالعات مربوط به فضای داخلی و LBS، که عمدتاً با ناوبری و مسیریابی مرتبط است، به ویژه برای مواقع اضطراری کمک کرده است. NRS یک مدل مبتنی بر شبکه است و تحقیقات ثابت کرده است که به دلیل ساختار ساده گرهها و لبهها، برای پرس و جوهای فضایی کارآمدتر است [ ۴ ].
NRS میتواند فضاهای پیچیده و روابط مربوط به آنها را علیرغم شکل سادهشان به تصویر بکشد، و برنامههای کاربردی ممکن است این مدل را بسته به نیازهای خاص آن پیادهسازی کنند. به عنوان مثال، برای پیمایش در سطوح طبقه، گره ها ممکن است هر سطح طبقه را نشان دهند و لبه های پیوند دهنده ممکن است روابط اتصال را در هر سطح طبقه ساختمان نشان دهند. برای ناوبری دقیق تر، مانند بین اتاق ها در سطح طبقه، گره نشان دهنده یک طبقه قابل تجزیه به زیرگرافی است که چیدمان طبقه را به تصویر می کشد. هر گره نمایانگر فضای اتاق یا راهرو است. اساساً، این ساختار چند سطحی نمایش چند مقیاسی از فرم داخلی یک فضای داخلی را امکان پذیر می کند.
در حالی که NRS این مفهوم را تعریف کرده است، هیچ مشخصاتی برای توسعه زیرشبکه ها در سلسله مراتب گره وجود ندارد. به طور مشابه، جدا از تعریف اتصال بین چندین لایه فضا، IndoorGML مکانیزمی برای نمایش شبکه های چند سطحی سلسله مراتبی ندارد. علاوه بر این، هیچ مشخصاتی در مورد اینکه سطوح فردی باید در کدام مقیاس ساخته شوند و به تبع آن، چه جنبهها و محدودیتهایی از فضا باید در هر کدام در نظر گرفته شود، وجود ندارد.
دوباره مثالی از یک گره را در نظر بگیرید که یک طبقه کامل را در یک شبکه مقیاس در سطح ساختمان نشان می دهد. گره هایی که شبکه را در سطح سلسله مراتبی بعدی تشکیل می دهند باید فضاهای فرعی را در سطح یک طبقه نشان دهند. بنابراین، یک گره در سطح بالاتر باید به گره های کوچکتر در یک شبکه سطح پایین تر تقسیم شود. برای نمایش دقیق اتصالات گره ها از طریق لبه ها، باید ساختار زیرفضاها را در نظر گرفت. IndoorGML این فرآیند تجزیه را به عنوان زیرفاصله [ ۳ ] تعریف می کند. بنابراین لازم است انتزاعات شبکه با جزئیات بیشتری از فضای داخلی تولید شود. بنابراین، فرآیند زیرفاصله سازی منجر به تولید داده هایی می شود که فضاها را بهتر نشان می دهد و در نتیجه ناکارآمدی در نمایش مسیرها را کاهش می دهد [ ۵ ].
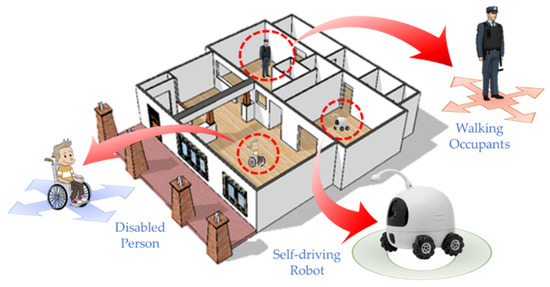
علاوه بر این، از آنجایی که ساکنان مختلف فضا نیازهای متنوع و محدودیت های قابل اجرا دارند، نمایش دقیق فضا در سطوح مختلف دانه بندی ضروری است. به تصویر کشیدن مسیرهای ناوبری با استفاده از NRS، در عین اینکه قابل اجرا و قابل استفاده است، برای ناوبری عابر پیاده مناسب تر است. شکل ۱ عوامل مختلفی را نشان می دهد که در فضای داخلی حرکت می کنند، از جمله افرادی که با ویلچر و روبات های خودران تردد می کنند.
چارچوب NRS برای مدلسازی ناوبری داخلی بر روی یک نوع حرکت تکی تمرکز دارد زیرا یک راه واحد برای نمایش فضای داخلی دارد. این تصویر مبتنی بر نمودار از فضا وجود ندارد و برای روباتها یا اشیاء پرنده مانند وسایل نقلیه هوایی بدون سرنشین (UAV) قابل استفاده نیست [ ۶ ]. علاوه بر این، داده های شبکه ممکن است در محلی سازی سایر عوامل داخلی، مانند متغیرهای محیطی، مفید باشد. به عنوان مثال، هنگام ردیابی آتش یا گسترش دود، یک تقسیم بندی فضایی دانه بندی برای تعیین دقیق مکان ها ضروری است. این نمایندگی همچنین امکان پوشش کامل یک منطقه مورد علاقه را فراهم می کند [ ۷]، مشابه رویکردهای اتوماتای سلولی (CA) و دادههای پایه مورد استفاده در شبیهسازیهای مبتنی بر عامل. بنابراین، مفهوم زیرفاصله در تولید داده های شبکه برای توصیف کامل سلسله مراتب فضاهای داخلی ضروری است. مهمتر از آن، استفاده از شبکه های چند سطحی می تواند برنامه های کاربردی برای داده های تولید شده را گسترش دهد.
هدف نویسندگان این مطالعه ارائه یک چارچوب زیرفاصله برای تولید داده های توپولوژیکی سلسله مراتبی چند سطحی برای فضای داخلی است. بر این اساس، ما سطوح سلسله مراتب فضا را در ساختار ساختمان و نمایش شبکه مناسب برای هر یک تعریف می کنیم. ما محدودیت های مختلفی را در نظر می گیریم که روش زیرفاصله سازی باید برای هر سطح در نظر بگیرد. از طریق این مفاهیم، هدف ما نشان دادن سلسلهمراتب فضاهای داخلی، نحوه ایجاد این سلسله مراتب توسط فرآیند زیرفاصلهسازی و در نتیجه نحوه بیان دادههای مبتنی بر شبکه این روابط است. ما چارچوب سلسله مراتبی خود را با ارائه یک ماژول هسته توسعه یافته IndoorGML و اجرای داده های نمونه به عنوان نمونه های گویا رسمی می کنیم.
اگرچه ما چارچوبی را برای تولید داده های شبکه پیشنهاد می کنیم که روابط توپولوژیکی و سلسله مراتبی را بیان می کند، اما بر نمایش هندسی دقیق فضای داخلی تمرکز نمی کنیم. استفاده از یک نمایش توپولوژی مبتنی بر شبکه، یک مفهوم سلولی به جای اقلیدسی از فضا را به کار می گیرد. به این ترتیب، موقعیتیابی عوامل ناوبری، از جمله سیستمهای مرجع و تکنیکهای محلیسازی، در محدوده مقاله ما نیست. علاوه بر این، به جای دقت هر روش در تولید زیرفضاهای دقیق، ما بر روی این تمرکز می کنیم که کدام روش های زیرفاصله برای تولید شبکه مورد نظر در یک سطح سلسله مراتبی خاص مناسب هستند.
ما این مقاله را به صورت زیر ساماندهی می کنیم. بخش بعدی مطالعات مرتبط با بازنمایی فضای داخلی، مدلهای توپولوژیکی، مدلهای سلسله مراتبی و زیرفاصله را بررسی میکند. سپس، سلسله مراتب فضای داخلی را مورد بحث قرار میدهیم، اینکه چگونه زیرفاصلهسازی در تولید دادهها در هر سطح سلسله مراتبی نقش دارد و چگونه مجموعه داده این روابط را بیان میکند. در همان بخش، چارچوبی برای تولید داده های شبکه برای هر سطح سلسله مراتبی و پسوند IndoorGML برای رسمی کردن روابط سلسله مراتبی پیشنهاد می کنیم. در ادامه این بخش، چارچوب پیشنهادی و مدل سلسله مراتبی خود را با استفاده از آزمایشی که بر روی دادههای نمونه انجام شد نشان میدهیم. بخش پایانی مطالعه و دستورالعملهای مطالعات بیشتر را خلاصه میکند.
۲٫ ادبیات مرتبط
از آنجایی که فضاهای داخلی که در آن انسان ها حضور دارند پیچیده تر شده اند، مطالعات و تحولات مرتبط بر این اساس گسترش یافته است [ ۸ ]. خدمات مبتنی بر مکان (LBS) به جای یک پلت فرم ارائه داده صرف، به ابزارهای حل مسئله و تصمیم گیری نیاز دارند. از این رو، این سیستم ها باید قابلیت تحلیل داشته باشند. علاوه بر این، ارائه این خدمات در داخل خانه در بلایای طبیعی و غیر طبیعی بسیار مهم است [ ۹ ].
داده های توپولوژیکی در انجام تحلیل های فضایی ضروری هستند. به خصوص در فضاهای داخلی، این جنبه ها از مکان کاربر حیاتی تر هستند [ ۱۰ ]. روابط بین ویژگی هایی که این مجموعه داده ها نشان می دهند، امکان اجرای تحلیل های پیچیده را فراهم می کند. از این رو، این روابط ستون فقرات برنامه های LBS را تشکیل می دهند، به ویژه در برنامه های کاربردی شهری، ناوبری، و هدایت مسیر برای انسان ها، روبات ها و سایر عوامل [ ۱۱ ، ۱۲ ].
داده های توپولوژیکی داخلی ممکن است به روش های مختلفی قابل نمایش باشد. مطالعات اولیه بر روی توپولوژی فضا، نمایش های مرزی و مدل های هندسی را به عنوان آنالوگ برای داده های توپولوژی دوبعدی (۲ بعدی) رایج پیشنهاد کردند [ ۱۳ ]. از طریق بدوی، این مدل ها اشیاء دنیای واقعی را به همان صورتی که توسط انسان قابل درک هستند نشان می دهند [ ۱۴ ]. به عنوان مثال، ساختار داده های رسمی سه بعدی (FDS) تقسیم کامل فضا را به نقاط، خطوط، سطوح و بدن فرض می کند. این اشیاء مطابقت ۱:۱ با اشیاء دنیای واقعی دارند و بنابراین اطلاعات هندسی مشابه توپولوژی دارند [ ۱۴ ]. به دنبال این، مدلهای بیشتری پیشنهاد شدهاند، به عنوان مثال، شبکه چهار وجهی (TEN) [ ۱۵ ] و مدل فضایی ساده شده (SSM) [16 ]. این مدل ها به طور مشابه از پرس و جوهای فضایی و تجسم از طریق نمایش توپولوژیکی خود پشتیبانی می کنند. با این حال، این روش بیان به دلیل پیچیدگی آن، کاربردهای محاسباتی را، به ویژه در سازههای داخلی بزرگ یا پیچیده، سنگین میکند. روابط توپولوژیکی باید از ابتدایی ها محاسبه شود، زیرا آنها به صراحت بیان نمی شوند [ ۱۳ ، ۱۷ ]. از این رو، اجرای برنامه های ناوبری برای این مدل ها چالش برانگیز است [ ۲ ].
به عنوان جایگزینی برای نمایش مرزی، مدلهای مبتنی بر شبکه از نمودارهایی استفاده میکنند که بر بیان صریح روابط توپولوژیکی تمرکز دارند. مدل داده ترکیبی (CDM) یک مدل مبتنی بر شبکه است که قادر به بیان روابط توپولوژیکی به صورت سه بعدی است. فرآیند دوگانگی پوانکار فضای اقلیدسی را به فضای دوگانه تبدیل می کند. به عبارت دیگر، فضاهای سه بعدی و روابط توپولوژیکی آنها به ترتیب به گره ها و لبه ها انتزاع می شوند و در مجموع به آنها NRS می گویند. این مدل اساس مدلهای بعدی است که از نمایشهای شبکه مانند [ ۱۸ ، ۱۹ ، ۲۰ ] و استاندارد بینالمللی IndoorGML [ ۳ ] استفاده میکنند.
با این حال، NRS یک مدل کاملا منطقی است که فقط مجاورت، اتصال و روابط سلسله مراتبی را توصیف می کند. از آنجایی که هیچ ویژگی هندسی وجود ندارد، محدودیتی در انواع تحلیل عملکردی برای این داده ها وجود دارد. مشکلات مبتنی بر شبکه مانند مسیریابی دقیق و تجزیه و تحلیل تخصیص نیاز به یک مدل شبکه هندسی مکمل، مانند مدل شبکه هندسی سه بعدی (GNM) [ ۲۱ ] دارد.]. از آنجایی که هندسه بر چیدمان و ساختار یک فضای داخلی تأثیر می گذارد، همچنین عاملی در ساختار سلسله مراتبی GNM است. اطلاعات هندسی دقیق تر می تواند به طور موثر سطوح شبکه سلسله مراتبی پایین تری ایجاد کند. به عنوان مثال، CDM در سطح طبقه را در نظر بگیرید که دارای یک گره واحد است که فضای راهرو را نشان می دهد: این گره باید بر اساس اطلاعات هندسی آرایش اتاق در راهرو به چندین گره در GNM تجزیه شود. فرض کنید باید یک GNM سطح بسیار پایینتری تولید کنیم. در این حالت، هر اتاق باید به واحدهای کوچکتر تقسیم شود تا شبکه دقیق تری را نشان دهد.
فرآیند زیرفاصله سازی این تقسیم بندی فضا به واحدهای کوچکتر است. این فرآیند از ویژگی های هندسی برای به تصویر کشیدن مسیرهای دقیق برای فضای داخلی، به ویژه در مناطق بزرگ استفاده می کند. شبکه دقیق امکان تحلیل دقیق تری مانند مسیریابی کارآمد و محلی سازی داخلی را فراهم می کند [ ۲۲ ]. از این رو، یک چارچوب زیرفاصله در بیان جزئیات فضای داخلی از طریق فرآیند تجزیه فضا ضروری است. بنابراین، این فرآیند برای تبدیل کامل یک NRS منطقی مانند CDM به یک NRS هندسی مانند GNM نیز حیاتی است. علاوه بر این، همچنین امکان تولید ساختارهای سلسله مراتبی سطح پایینتری را فراهم میکند که فضای داخلی را در مقیاسهای کوچک بیان میکنند.
مطالعات تقسیمات فضایی دو دیدگاه دارد. در کاربردهای موقعیت یابی داخلی، حسگرها باید به طور مناسب در فضای داخلی مستقر شوند، زیرا این امر بر دقت، هزینه و محدوده خدمات تأثیر می گذارد. استفاده از چند ضلعی های تیسن یا نمودارهای ورونوی [ ۲۳ ] راه ساده ای برای تعیین آرایش حسگرها [ ۲۴ ] است، همانطور که از شبکه هایی با اندازه مساوی بر اساس پوشش حسگر [ ۲۵ ] استفاده می شود. آرایش اولیه این حسگرها بر اساس نواحی تقسیم شده قابل تنظیم بر اساس محدوده حسگر است، مانند تقسیمات شش ضلعی حاصل از شبکه های مثلثی اولیه [ ۲۶ ]. موانع درون فضای داخلی نیز در روش های مشابه در نظر گرفته می شوند [ ۲۷]. این تکنیکها بر استفاده از تقسیمبندی فضا برای بهبود دقت موقعیتیابی، نه از طریق افزایش تعداد سنسورها، بلکه با قرار دادن کارآمد آنها تأکید میکنند. موقعیت یابی مقرون به صرفه به نحوه تقسیم موقعیت حسگرها در فضای داخلی بستگی دارد.
تحقیقات ایجاد مسیرهای سرپوشیده نیز از تعیین زیرفضاها با معیارهای مختلف استفاده کرده است. پارتیشنها بر اساس اطلاعات معنایی مرتبط برای منابع فعلی و عوامل مناسب بر پارتیشنهای فضا تأثیر میگذارند، به عنوان مثال، در تعریف اینکه کدام زیرفضا قابل کشتیرانی هستند [ ۲۸ ] و عملکرد طبقهبندیشده یک منطقه برای تولید شبکههای ناوبری پیچیده [ ۲۲ ]. انواع مختلف عامل و حالت های حرکتی مربوط به آنها نیز در نظر گرفته شده است، مانند راه رفتن برای عابران پیاده، ویلچر برای افراد دارای معلولیت، و پرواز برای هواپیماهای بدون سرنشین [ ۶ ، ۲۹ ].
فضاهای داخلی سیستم های ایزوله نیستند زیرا فضا علیرغم اینکه به طور جداگانه در بین داده ها و برنامه ها بیان می شود اساساً پیوسته است [ ۳۰ ]. با این حال، مطالعات ناوبری یکپارچه داخلی-خارجی را در سناریوهای مختلف و مدل های مختلف ادغام فضای داخلی-خارج نشان داده اند [ ۱ ، ۳۱ ، ۳۲ ]. با این حال، همانطور که ماموران از فضای بیرونی به فضای داخلی عبور می کنند، شبکه ناوبری به طور یکنواخت در سراسر این نمایش ها بیان می شود. فضا ذاتاً سلسله مراتبی است، به ویژه در داخل خانه، به این معنی که فضاها می توانند شامل فضاهای کوچک تری در داخل باشند، به عنوان مثال، یک سطح طبقه شامل اتاق ها. از این رو، شبکهها در سراسر این سلسله مراتب مقیاسهای متفاوتی دارند و میتوانند در سطوح مختلفی از جزئیات قابل نمایش باشند.
فرض کنید نمونه آزمایشی در کوان و لی (۲۰۰۵) را در نظر بگیرید، که در آن مسیری از ایستگاه آتش نشانی تا محل فاجعه در طبقه ۴۲ ساختمان دیگری وجود دارد. مسیر از شبکه خیابان در فضای باز تا خروجی ساختمان شروع می شود، سپس به سمت راه پله برای بالا رفتن طبقات و در طبقه مقصد به سمت اتاق مورد نظر شروع می شود. ناوبری در فضای باز در یک محیط کلان فضایی رخ می دهد و ناوبری داخلی در یک سطح میکرو انجام می شود. در نتیجه، در همان مثال، دو سطح مقیاس مجزا در فضای داخلی وجود دارد. با این حال، بیان همه دادهها در یک سطح از جزئیات غیرعملی است زیرا فقط برخی از بخشها برای هر بخش از مسیر مرتبط هستند.
تحقیقات قبلی در مورد نمایش توپولوژیکی فضای داخلی، روابط سلسله مراتبی را برای غنی سازی تحلیل در نظر گرفته است. یک ساختار سلسله مراتبی توپولوژیکی پرس و جوهای فضایی و معنایی را در مسیرهای کاربر که از سلسله مراتب فرموله شده از مکان ها و خروجی ها به جای فواصل حاصل می شود، امکان پذیر می کند [ ۳۳ ].
به طور مشابه، تجزیه سلسله مراتبی یک ساختمان امکان بیان یک سازه را از طریق طبقات و اتاقهای مجزا بر اساس پارتیشنها فراهم میکند. اگرچه این نمایش بر روی سلسله مراتب اشیاء محدود تمرکز می کند و نه خود فضاها، اما نشان می دهد که چنین ساختارهایی برای نمایش فضاهای داخلی، به ویژه برای رندر کردن حجم ها سودمند هستند. توسعه Maptree [ ۳۴ ]، یک جاسازی توپولوژیکی ۲ بعدی از فضا، از مدل سازی اطلاعات ساختمان (BIM) برای به تصویر کشیدن روابط سلسله مراتبی مشابه بین اجزای ساختمان استفاده می کند [ ۳۵ ].
به عنوان بخشی از محیط ساخته شده، BIM استانداردی برای کاربردهای فضای داخلی با گرایش به حوزه معماری، مهندسی و ساخت و ساز است. به ویژه با ابتکارات اخیر کنسرسیوم فضایی باز (OGC) در هدایت مدیریت کارآمد شهرها از طریق داده های فضایی باز سه بعدی، BIM یک جزء ضروری برای نمایش محیط های داخلی است [ ۳۶ ]. کنسرسیوم همچنین همکاری با buildingSMART International، حامی کلاسهای پایه صنعت استاندارد BIM (IFCs)، برای رسیدگی به ادغام با سایر استانداردهای سه بعدی مانند CityGML و LandInfra [ ۳۷ ] منتشر کرد.]. این گزارش تصدیق می کند که روابط سلسله مراتبی روش مناسبی برای نمایش واقعی جهان فیزیکی ارائه می دهد. مهمتر از آن، نمایش سلسله مراتب در میان مؤلفه ها در بین استانداردها به اشتراک گذاشته شده و فرصتی برای یکپارچه سازی ارائه می دهد. یک مطالعه اخیر این اشتراک را تایید کرد و همراه با مدل اطلاعات داخلی ArcGIS (AIIM)، فرمت داده نقشهبرداری داخلی اپل (IMDF) و OmniClass، بر روابط سلسله مراتبی بین اجزای فضایی داخلی تأکید کرد [ ۳۸ ].
مطالعات تولید دادههای توپولوژیکی از دادههای BIM، مانند IFC را که فضای داخلی را نشان میدهد، با استفاده از اطلاعات هندسی و معنایی غنی آن بررسی کردهاند [ ۳۹ ، ۴۰ ]. در حالی که اطلاعات دقیقی در مورد چیدمان و اندازه فضاها دارد، روابط سلسله مراتبی هنوز در داده های تولید شده وجود ندارد. با این حال، اطلاعات سلسله مراتبی هنوز یک جنبه مهم در هنگام استفاده از داده های BIM در ناوبری داخلی است. اطلاعات دقیق در مورد ویژگی ها و قوانین کاربردی نیز به برنامه ریزی مسیر روبات ها با استفاده از نقشه های توپولوژیکی سلسله مراتبی کمک می کند [ ۴۱ ]. روابط سلسله مراتبی در ویژگیهای BIM در رویکردهای محلیسازی داخلی در شناسایی ترکیبهای بیکن و منشاء سیگنال خاصتر مفید بوده است [ ۴۲ ]]. مهمتر از همه، ماهیت سه بعدی BIM مزیت آن در غلبه بر محدودیت های داده های هندسی دو بعدی در برنامه های ناوبری است که راه را برای یک مدل ناوبری مبتنی بر BIM پیشنهادی هموار می کند [ ۴۳ ]. با این حال، این مدلها بر نمایشهای هندسی فضای داخلی تکیه میکنند و توپولوژی باید برای به دست آوردن دادهها برای نشان دادن روابط فضایی ضروری برای ناوبری داخلی مشتق شود. علاوه بر این، اطلاعات مربوط به روابط سلسله مراتبی بین فضاها هنوز وجود ندارد، زیرا تنها سلسله مراتب بین اجزای ساختمان در داده های BIM وجود دارد.
نمایش سلسله مراتبی فضا اساساً بازنمایی های متعددی از یک فضا را پوشش می دهد که همراه با سطوح سلسله مراتبی متفاوت است. این پارادایم ارتباط نزدیکی با مفهوم سطح جزئیات (LOD) دارد. شناخته شده ترین نمونه تعریف شده در CityGML [ ۴۱ ] استاندارد OGC برای مدل های شهر سه بعدی است که پنج سطح را با اطلاعات معنایی متفاوت از ردپاها به عنوان LOD 0 تا مدل های معماری داخلی در LOD 4 توصیف می کند. در آخرین نسخه، OGC کاهش یافت. LOD 4 [ ۴۴ ]، و سطوح بیشتر بر بازنمایی های فضایی تمرکز دارند. مطالعات منتشر شده این مفهوم را برای گسترش تعریف LOD 4 در فضای داخلی از طریق BIM اصلاح کرده اند [ ۴۵]. علاوه بر این، ادبیات LOD های آگاه از زمینه را تعریف کرده است که ممکن است در یک ساختمان [ ۴۶ ] و سطوح فرعی برای هر یک از سطوح اصلی [ ۴۷ ] ناهمگن باشند.
برای فضای داخلی، مطالعات LOD ها را بر اساس اطلاعات هندسی، دقت موقعیت، سطح تعمیم و محتوای معنایی تعریف کرده اند [ ۴۸ ، ۴۹ ]. همچنین سطوح جداگانه ای برای هر یک منتشر شده است، مانند دقت موقعیتی LOD (PLOD)، LOD هندسی (GLOD)، LOD کامل (CLOD)، و LOD معنایی (SLOD) [ ۵۰ ]. طبقه بندی سطوح نیز بر اساس برنامه های کاربردی خدمات قابل اجرا وجود دارد [ ۵۱ ].
این مشخصات LOD، هم برای فضای بیرونی و هم برای فضای داخلی، بر اطلاعات هندسی و معنایی تمرکز دارد و هنوز فاقد تعاریفی است که به توپولوژی و پیامدهای آن در برنامه های ناوبری مربوطه مربوط می شود. Claridades و همکاران (۲۰۲۱) یک مشخصات LOD ارائه کرد که دادههای شبکه داخلی را در سطوح افزایشی مقیاس بر اساس محدودیتهای فضایی قابل اجرا دستهبندی میکند. هر سطح فضای داخلی قابل کشتیرانی را از طریق یک نمایش شبکه بر اساس NRS نشان می دهد.
۳٫ چارچوبی برای ایجاد یک شبکه ناوبری داخلی سلسله مراتبی چند سطحی
این بخش مفاهیم اساسی را برای فرمول بندی چارچوبی برای ایجاد یک شبکه سلسله مراتبی چند سطحی برای ناوبری داخلی مورد بحث قرار می دهد. ابتدا، ساختار فضای داخلی را از دیدگاه سلسله مراتبی مورد بحث قرار میدهیم تا زمینه ارتباط آن با زیرفضای داخلی را فراهم کنیم. پس از این، ما در مورد چگونگی بیان داده های شبکه این زیرفضاها و روابط فضایی مربوطه آنها برای به تصویر کشیدن روابط توپولوژیکی بحث می کنیم. سپس، ما در مورد اینکه چگونه مدل داده باید روابط سلسله مراتبی را بیان کند و این مفاهیم را برای یک چارچوب پیشنهادی فضای داخلی داخلی برای تولید شبکه چند سطحی یکپارچه کند، بحث می کنیم. در نهایت، ما مفاهیم را با گسترش مدل اصلی IndoorGML از طریق نمودار کلاس یکپارچه مدلسازی زبان (UML) رسمی می کنیم.
۳٫۱٫ زیرفاصله سلسله مراتبی در سطوح مختلف فضایی
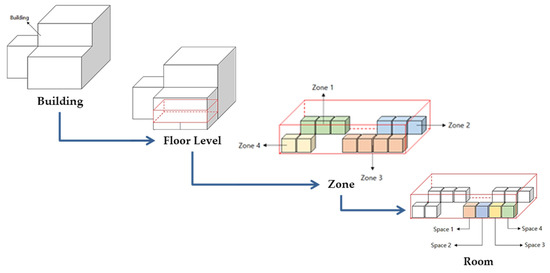
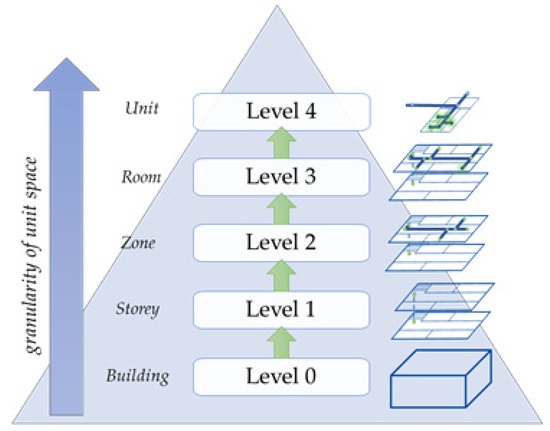
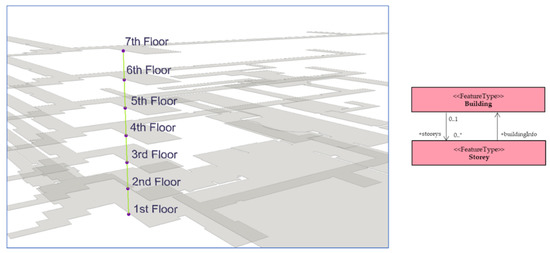
در اکثر مدل های داده، مانند IFC [ ۵۲ ]، ساختمان ها به طور منطقی و فیزیکی از اجزای فضایی کوچکتر ساخته شده اند [ ۳۸ ]. واحدهای فرعی یک فضای خاص به طور شهودی سلسله مراتب فضای داخلی را توصیف می کنند، مانند آنچه در شکل ۲ نشان داده شده است. مجموعه داده های شبکه نشان دهنده فضاهای قابل کشتیرانی در این ساختارها برای انجام خدمات مبتنی بر مکان، به ویژه برای فضای داخلی ضروری هستند. این مجموعه داده های شبکه نشان دهنده روابط توپولوژیکی بین فضاها، مانند مجاورت و اتصال فضاها در IndoorGML [ ۳ ] است.
با این حال، مدلهای دادههای کنونی فاقد توصیف روابط سلسله مراتبی هستند، که در به تصویر کشیدن کامل جزئیات فضاها در سطوح مختلف فضای داخلی ضروری است. چنین روابطی به کاربران اجازه می دهد تا خدمات کارآمدتر و دقیق تری را به خصوص در موقعیت یابی و هدایت مسیر ارائه دهند. از این رو، زیرفاصله یک مرحله ضروری در توصیف روابط سلسله مراتبی است.
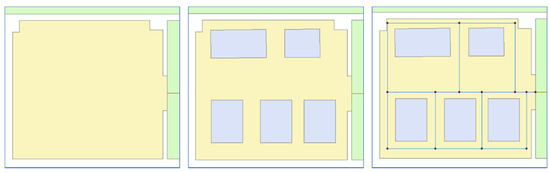
بر خلاف مدلهای فضای باز یا مدلهای داخلی که بر اجزای ساختمانی مانند BIM تمرکز میکنند، مدلهای فضای داخلی نه به اجزای معماری، بلکه به خود فضاها توجه دارند. با داشتن یک الگوی مدلسازی متفاوت، مدلهای فضای داخلی، مانند IndoorGML، مفهوم سلولی فضا را در نظر میگیرند. سلول های غیر همپوشانی که لزوماً دارای ویژگی های هندسی یکسان نیستند، به عنوان کوچکترین واحد فضای داخلی تعریف می شوند [ ۳ ]. در اکثر مطالعات فضای داخلی، مانند رویکردهای زیرفاصله ارائه شده در [ ۶ ، ۲۲ ، ۵۳ ، ۵۴ ]، اتاق ها کوچکترین سلول ها یا واحدها در نظر گرفته می شوند. با این حال، بر اساس چارچوب زیرفاصله ارائه شده در [ ۵۵]، و رویکردهای تقسیم بندی ارائه شده در [ ۵ ، ۵۶ ]، عناصر کوچکتری از فضا در داخل اتاق ها وجود دارد. در نظر گرفتن نواحی مختلف یک اتاق، مانند آنچه در شکل ۳ نشان داده شده است ، امکان تقسیم اتاق به واحدهای کوچکتر برای به دست آوردن یک زیرفضای دانه دانه بیشتر را فراهم می کند.
نیاز به نمایش این عناصر کوچکتر در کاربردهای خاص به وجود می آید، به ویژه زمانی که موانع را در مسیریابی در نظر بگیریم. همانطور که در شکل ۱ نشان داده شده است ، ما می توانیم عوامل ناوبری مختلفی را برای موارد استفاده مختلف در هنگام تقسیم یک فضای داخلی در نظر بگیریم. به عنوان مثال، یک ربات خودران باید هنگام حرکت در داخل اتاق از موانع جلوگیری کند. با حذف امکاناتی که فضاها را اشغال می کنند می توانیم فضاهای آزاد را شناسایی کنیم. به همین ترتیب، ماموری که از طریق ویلچر سفر می کند با موانع مشابهی روبرو می شود اما ممکن است دامنه حرکت متفاوتی داشته باشد.
نحوه تقسیم یک اتاق به واحدها ممکن است به کاربرد بستگی داشته باشد. شکل ۳ c یک تقسیم منطقی را با واحدهای با اندازه های متفاوت نشان می دهد، در حالی که شکل ۳ d یک تقسیم سلولی کامل را نشان می دهد. این دو نمونه در یک سطح سلسله مراتبی هستند و واحدهای کوچکتر را در یک اتاق به تصویر می کشند. علیرغم تفاوت در ابعاد و روش تقسیم، هر واحد به عنوان یک سلول مجزا در نظر گرفته می شود که دارای مرز مشترک اما نه همپوشانی با سلول های همسایه است.
۳٫۲٫ بیان روابط فضایی زیرفضاها از طریق داده های شبکه
همراه با سطوح سلسله مراتبی، محدودیتهای بیشتری برای یک فضای خاص اعمال میشود و یک روش تقسیم فضایی مربوطه وجود دارد. هر یک از اینها فضاهای فرعی غیر همپوشانی با اندازه های مناسب برای یک مورد خاص ایجاد می کند. توجه به این نکته ضروری است که طبق تعریف، زیرفاصله فقط زیر واحدهای یک فضای خاص را تولید می کند. یک زیرواحد دانهدارتر برای سطح بالاتر وجود دارد، که وضوح بالاتری از تکه تکه شدن فضا را بیان میکند، که برای مدلسازی یک ناوبری با جزئیات مناسب ضروری است. با این حال، این زیر واحدها به تنهایی برای تسهیل ناوبری کافی نیستند، که به اطلاعاتی در مورد رابطه فضایی فضاها در یک سطح نیاز دارد. این روابط فضایی، مانند اتصال، باید به عنوان داده های شبکه بیان شود.
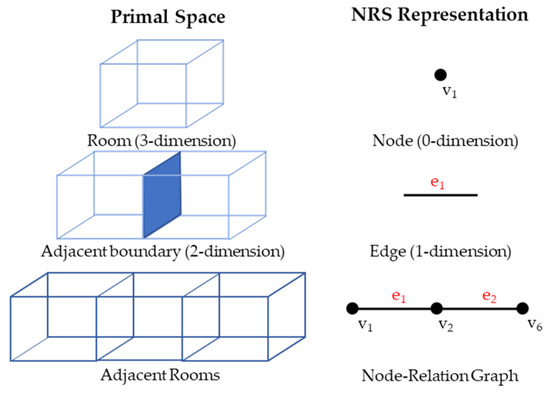
به منظور تسهیل ناوبری، داده های مکانی باید روابط توپولوژیکی بین زیرفضاها را بیان کنند. NRS [ ۲ ]، همانطور که در بخش ۲ مورد بحث قرار گرفت، یک نمایش شبکه ای از فضاهای داخلی است که از گره هایی تشکیل شده است که فضاها و لبه هایی را که روابط توپولوژیکی را به تصویر می کشند انتزاع می کنند. از دوگانگی Poincare برای تبدیل فضای توپولوژیکی به فضای دوگانه استفاده می کند تا یک نمایش صریح از توپولوژی به روشی ساده ایجاد کند. در NRS، یک جسم سه بعدی در فضای اولیه به ابعاد صفر در فضای دوگانه تبدیل می شود و یک اتاق سه بعدی را به یک گره تبدیل می کند. به همین ترتیب، این مفهوم یک جسم دو بعدی را به عنوان یک بعد در فضای دوگانه تعریف می کند. از این رو، یک لبه یک مرز مشترک را به تصویر می کشد. این اشیاء ساختار گره-لبه گراف را تشکیل می دهند که به صراحت روابط توپولوژیکی فضاها را نشان می دهد، همانطور که در شکل ۴ نشان داده شده است.
در حالی که روشهای متعددی برای بیان توپولوژی دادههای مکانی وجود دارد، ساختار شبکه برای ناوبری داخلی مناسبتر است. این مزیت به دلیل صریح بودن و ساختار ساده آن است، به ویژه نسبت به روش های نمایش مرزی [ ۴ ]. بنابراین، باید دادههای NRS که روابط مذکور را از طریق ساختار شبکه نشان میدهند، تولید کرد زیرا برای ناوبری و به تصویر کشیدن محدودیتها در فضای داخلی مناسبتر است. شکل ۵ سطوح سلسله مراتبی را نشان می دهد که فضای داخلی را در مقیاس های فضایی فزاینده نشان می دهد، که از مشخصات LOD از [ ۵۵ ] اصلاح شده و با سلسله مراتب فضایی که در بخش قبل بحث شد تطبیق داده شده است.
سطوح جزئیات از عنصر بنیادی سلسله مراتب فضایی شروع میشود، بهویژه یک ساختمان کامل بدون زیرفضا در سطح ۰٫ سطح بعدی در سطح ۱ است، جایی که هر زیر واحد که بهعنوان یک گره در شبکه نمایش داده میشود، بر اساس مقدار ارتفاع متفاوت است. از این رو، این سطح شامل زیرواحدهایی است که هر یک سطح طبقه یک ساختمان را به تصویر میکشند که به عنوان master_node در CDM نشان داده شده است [ ۲ ]. این سطح برای تحلیلهای کلان فضاهای داخلی، مانند ناوبری در طبقات یک ساختمان، قابل استفاده است. علاوه بر این در CDM هر master_node نشان داده شده است که یک زیرشبکه را در سطح ۱ به ارث می برد که نشان دهنده شبکه ناوبری در سراسر زیر واحدها و راهروها در سطح یک طبقه جداگانه است. سطح ۲ نشان دهنده یک شبکه با گره هایی است که مناطق را نشان می دهد.
سطح ۳ شامل زیرشبکههای درون این زیرواحدها، مانند بخشهای فرعی بیشتر در داخل اتاقها، سالنها یا لابیها است. در سطح ۴، ما شبکه ناوبری را با فضاهای آزاد واقعی در داخل اتاق ها در نظر می گیریم. قابل توجه، همراه با محدودیتهای توصیه شده و روشهای تقسیم فضا، Claridades و همکاران. (۲۰۲۱) همچنین موارد استفاده از برنامه مربوطه را برای هر سطح پیشنهاد کرد [ ۵۵ ].
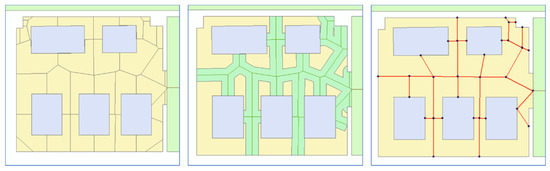
تولید شبکه برای سطوح بالاتر سلسله مراتبی ساده است زیرا تجزیه فضا از قبل امکان اتصال زیرفضاهای تولید شده را فراهم می کند. به عنوان مثال، استفاده از تبدیل محور میانه مستقیم (SMAT) در ترکیب با اطلاعات معنایی برای ایجاد یک شبکه سطح ۳ منجر به نموداری شبیه NRS می شود، زیرا محورهای حاصل نتایج نصف کردن لبه های اشکال اصلی هستند.
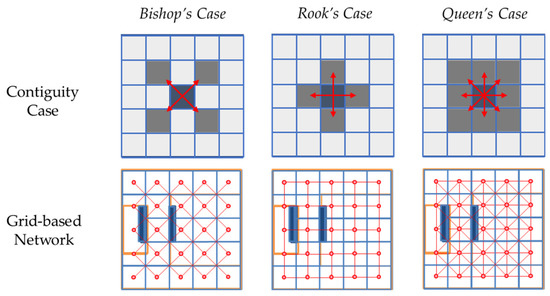
در نتیجه، برای شبکه های سطح ۴، با استفاده از نمودارهای Voronoi [ ۲۳ ] یا مثلث سازی Delaunay، تقسیم یک اتاق را به واحدهای کوچکتر با در نظر گرفتن شکل و فضاهای آزاد باقی مانده امکان پذیر می کند. این روش ها لبه هایی را در طول روش تقسیم بندی ایجاد می کنند که نشان دهنده مسیرهای ناوبری است. با این حال، برای برخی از انواع شبکه های سطح ۴، ما به روش هایی نیاز داریم که فضاها را به واحدهای بسیار کوچکتر تقسیم کنند. چنین روش های تقسیم بندی کامل، شبکه های فضایی منظم را تولید می کنند. در این روشها، روابط اتصال برای تعیین محل اتصال یالها به گرههای معرف فضاهای فرعی ضروری است. موارد مجاورت فضایی مختلف [ ۵۷ ] اتصال یک شبکه خاص به همسایگانش را تعریف می کند.
این موارد ارائه شده در شکل ۶ مبنایی برای نحوه بیان یال هایی است که داده های شبکه حاصله گره هایی را که نشان دهنده هر شبکه هستند را به هم متصل می کنند. به عنوان مثال، سرنشینی که از طریق ویلچر حرکت می کند ممکن است فقط به جلو و عقب حرکت کند، بنابراین مجاورت کیس Rook ممکن است بیشترین کاربرد را داشته باشد. از سوی دیگر، روباتهایی با درجات آزادی بیشتر در حرکت ممکن است از مجاورت پرونده ملکه استفاده کنند. بر خلاف وکسل سازی فضا، که در آن بازنمودهای زیر واحدها وکسل های حاصل از تقسیم بندی فرعی هستند، این مثال بر نمایش روابط فضایی با استفاده از داده های شبکه تأکید دارد. با وجود تقسیم بندی مشابه، نمایش نمودار واحدهای حاصل ممکن است بسته به مجاورت در نظر گرفته شده متفاوت باشد.
۳٫۳٫ روابط سلسله مراتبی بین سطوح فضایی
نمایش دادههای فضایی در سطوح مختلف مقیاس، تصاویر مرتبط متعددی از فضای داخلی را امکانپذیر میکند که میتواند تجزیه و تحلیل دادهها و تجسم با وضوح چندگانه را فعال کند. فرآیند زیرفاصله سازی فقط یک روش برای تقسیم فضای داخلی نیست. با این حال، ایجاد رابطه سلسله مراتبی بین فضاها و سطوح سلسله مراتبی نیز ضروری است. این سلسله مراتب بین زیرواحد فضای داخلی سه بعدی و زیر واحد مربوط به آن است. از یک سلسله مراتب فضایی بالاتر به یک سلسله مراتب فضایی پایین تر، مجموعه داده نمایانگر یک چشم انداز دانه دارتر از فضا است.
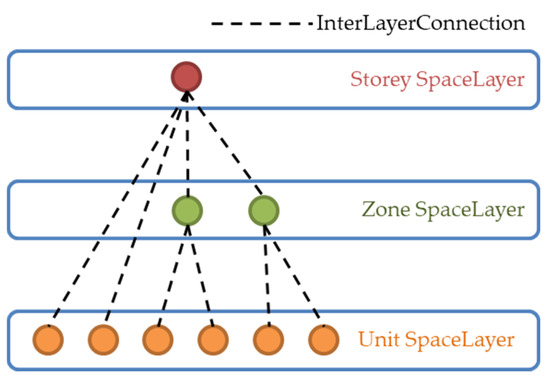
هر گره ای که فضایی را از یک سطح درشت تر نشان می دهد، با استفاده از یک زیرشبکه متشکل از گره های سلسله مراتبی پایین تر، نمایش دقیق همان فضا را به ارث می برد. از این رو، اگرچه روشهای زیرفاصلهسازی عمدتاً زیرفضاها را از طریق تقسیمبندی ایجاد میکنند، آنها همچنین روابط سلسله مراتبی را در سطوح نمایش ایجاد میکنند. به طور خاص، همانطور که در شکل ۷ نشان داده شده است، آنها سلسله مراتب شبکه را از طریق یک گره و زیرشبکه ارثی آن ایجاد می کنند .
مشخصات LOD موجود برای فضای بیرونی و داخلی به محتوای هندسی و معنایی بستگی دارد. اینها نمایش های متعددی را در سطوح مختلف ارائه می دهند. با این حال، این داده ها مستقل هستند و از تجزیه و تحلیل قابلیت کشتیرانی فضاها پشتیبانی نمی کنند. در مقابل، LODهایی که ما تعریف کردهایم، علاوه بر سطوح تقسیمبندی متفاوت در سطوح، همان فضا را نیز نشان میدهند. همانطور که زیربخش ها روابط سلسله مراتبی را از فضای تقسیم شده و زیر واحدهای حاصل از آن بیان می کنند، روابط توپولوژیکی را نیز نشان می دهد.
رابطه سلسله مراتبی بین سطوح باید در داده ها به همراه روابط مجاورت یا اتصال مدل شود تا امکان اجرای همزمان و کارآمد ناوبری در سطوح مختلف مقیاس فراهم شود. به طور مشابه، انسان ها در داخل فضاهای داخلی در سراسر سطوح ساختمان، در یک راهرو در یک سطح واحد، در یک اتاق واحد در آن راهرو و غیره حرکت می کنند. از آنجایی که برنامه های کاربردی ناوبری به داده های چند مقیاسی نیاز دارند، روابطی که به صورت سلسله مراتبی در سطوح مختلف بیان می شوند باید با داده های شبکه نیز بیان شوند. از این رو، مدل داده ای که روابط فضایی بین زیرفضاهای درون یک سطح را نشان می دهد باید روابط سلسله مراتبی بین سطوح را نیز نشان دهد. در IndoorGML، SpaceLayer نمونهای از هر سطح متصل از طریق InterLayerConnection را نشان میدهد، همانطور که در نشان داده شده است.شکل ۸ .
۳٫۴٫ چارچوبی برای تولید داده های توپولوژیکی مبتنی بر شبکه سلسله مراتبی
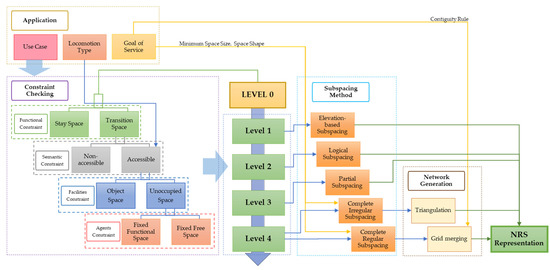
بر اساس مشخصات سطحی که قبلاً برای محدودیت ها و روش های زیرفاصله متناظر مورد بحث قرار گرفت، همراه با روش های تولید شبکه و مفهوم روابط سلسله مراتبی، چارچوبی برای تولید داده های شبکه در شکل ۹ پیشنهاد می کنیم . این چارچوب، طبقهبندی فضای سلسله مراتبی را بر اساس محدودیتهای قابل اجرا و الگوریتم زیرفاصله متناظر برای هر سطح مقیاس، و همچنین روشهای تولید شبکه توصیهشده برای فضای آزاد کاملاً تقسیمشده، نشان میدهد.
به منظور تعیین اینکه کدام سطح در اجرای ناوبری مناسب است، باید محدودیت های مناسب را بر اساس مورد استفاده تعیین کنیم. ابتدا باید عملکرد فضا را بررسی کنیم. در این مرحله، هر زیرفضای قابل کشتیرانی باید بر اساس عملکرد متفاوت باشد، مانند راهرویی که انتقال در سراسر فضا را تسهیل میکند یا اتاقی که عوامل ناوبری میتوانند در آن اقامت داشته باشند. مشابه رویکرد یونگ و همکاران. (۲۰۱۵) [ ۵۴ ]، گره ها فضاهای اقامت را نشان می دهند. فضاهای انتقال با توجه به چیدمان اتاق ها بیشتر زیرفضا می شوند تا مسیرهای ناوبری واقعی را به طور کامل منعکس کنند.
اینکه آیا یک فضا به دلیل ویژگی های عامل یا فضا برای یک عامل قابل دسترسی یا غیرقابل دسترسی است نیز عاملی برای زیرفاصله سازی است. به عنوان مثال، یک فضا ممکن است به دلیل اندازه یک نماینده یا محدودیتهای زمانی و مجوز فضا غیرقابل دسترسی باشد. به طور خاص، فقط فضاهای قابل دسترسی نیاز به زیرفضا دارند، زیرا این تنها فضاهایی هستند که می توانند ناوبری را انجام دهند.
به همین ترتیب، ما باید وجود امکانات داخلی را نیز در نظر بگیریم. چه متحرک و چه غیر متحرک [ ۵ ]، این اشیاء فضاهایی را اشغال می کنند و ممکن است به عنوان انسداد یا مانع برای عوامل عمل کنند. اینها علیرغم دسترسی به فضا، مسیر واقعی قابل کشتیرانی را برای عوامل کاهش می دهند. علاوه بر این، خود عوامل نیز ناوبری را محدود می کنند. به خصوص در سناریوهای چند عامله، سایر عوامل به عنوان موانعی عمل می کنند که فضا را اشغال می کنند. علاوه بر این، نحوه استفاده عوامل از فضاها و امکانات نیز فضاهای واقعی قابل کشتیرانی آزاد را در داخل خانه شناسایی می کند، همانطور که توسط [ ۵ ] نشان داده شده است. به طور کلی، این محدودیت ها بر انتخاب سطح مناسب سلسله مراتب مربوط به یک برنامه کاربردی (مقدم برای شناسایی یک زیرفاصله) و روش تولید شبکه تأثیر می گذارد.
The hierarchical procedure generates a multi-level network representation of the topological relationships of the indoor space. Level 1 networks represent an entire floor level as a node, dividing the building according to the height of each floor level. This network is suitable for navigation across building stories. Logically, the entire floor is divisible into zones for Level 2. For instance, we can characterize one apartment home as a zone in an apartment building. It cannot be considered a single room yet, since there are still rooms inside each apartment. Since a Level 2 hierarchical network inherits from a Level 1 network, we must decompose the master_node representing the zone into a subnetwork describing the layout of the rooms along the building corridor.
به دنبال این، میتوانیم هر اتاق را در یک منطقه در شبکه از طریق زیرفاصله برای سطح ۳ نشان دهیم. این روش مستلزم یک روش تقسیم جزئی مناسب برای اشکال محدب مانند راهروها، مانند الگوریتم SMAT است. همانطور که در بخش قبل بحث شد، زیرفاصله در این سطح در حال حاضر منجر به یک ساختار شبکه مانند می شود. از این رو، این سطح برای فعالیت های ناوبری با مبدا و مقصد تا سطح اتاق مناسب است.
شبکههای سطح ۴ از زیرشبکههای به ارث رسیده از گرههای سطح ۳ تشکیل شدهاند که مسیرهای ناوبری دقیقتر را برای مناطقی با بیش از یک دسترسی ممکن به ارث بردهاند. چنین فضاهایی ممکن است اتاق هایی با درهای متعدد یا فضاهای داخلی بزرگ باشند. از این رو، ممکن است نیاز به استفاده از محدودیتهای معنایی داشته باشیم تا مشخص کنیم کدام فضاها برای ایجاد شبکههای سطح ۴ به تجزیه بیشتر نیاز دارند. از آنجایی که این فضاها به غیر از راهروها، اشکال مختلفی دارند، یک روش عمومیتر تجزیه جزئی فضا، فضاهای فرعی را ایجاد میکند. از این رو، روش هایی مشابه نمودارهای ورونوی [ ۲۳]، همانطور که در بخش قبل مورد بحث قرار گرفت، مراحل لازم برای تولید یک شبکه است. این روشها اساساً نسخهای عمومیتر برای آنهایی هستند که در شبکههای سطح ۳ استفاده میشوند، و همچنین دادههای نوع شبکه را تولید میکنند. این سطح برای پیمایش سالنها، تئاترها، فرودگاهها یا پارکینگهایی که مسیرهای مشخصتری لازم است، مناسب است. با این وجود، بر خلاف اتاق هایی که در امتداد یک راهرو قرار گرفته اند، چیدمان ضمنی نیست.
در نتیجه، برنامههای کاربردی دیگر ممکن است به روشهای مختلف زیرفاصله برای تولید شبکههای سطح ۴ نیاز داشته باشند. به عنوان مثال، برنامهها ممکن است نیاز به در نظر گرفتن ویژگیهای داخلی برای تعیین فضاهای آزاد قابل کشتیرانی در زیر واحدهای داخلی داشته باشند. ما میتوانیم با در نظر گرفتن محدودیتهای تسهیلات با تمایز فضاهای شی از فضاهای اشغال نشده، مسیر ناوبری دقیقتری را تعیین کنیم. از آنجایی که فضاهای آزاد باقیمانده از نظر هندسی متنوع تر هستند، تقسیم یک فضا کاملاً بر اساس زمینه برنامه کاربردی سرویس عملی تر است. یک تقسیم کامل به فضاهای فرعی نامنظم یک شبکه دقیق و مناسب برای توصیف مسیر ناوبری انسان فراهم می کند. از آنجایی که این رویکردها بیشتر به اشیاء حاوی فضا بستگی دارند تا چیدمان طبقه، الگوریتمهای تقسیم فضا به الگوریتمهای بافر و نازککردن بستگی دارند.۳۸ ]، که به مراحل اضافی برای اتصال زیرفضاهای شبکه نیاز دارد. این سطح برای برنامه هایی مناسب است که نیازمند مسیرهای دقیق در فضاها بدون توجه به اندازه هستند، مانند اجتناب از موانع، به ویژه برای افراد ناتوان یا افراد دارای تحرک محدود.
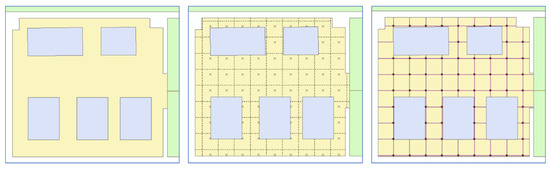
در نهایت، بهترین سطح از جزئیات نشان داده شده در سلسله مراتب سطح ۴، زیرفاصله کردن از طریق شبکه ها است. در برخی کاربردها، فضاهای شی را بیشتر از فضاهای اشغال نشده کسر می کنیم [ ۵ ]. این رویکرد عوامل را با یک مسیر واحد در یک فضای غیر خطی محدود نمی کند. بنابراین، فضای آزاد ثابت باقیمانده به طور کامل به شبکهها یا سلولهای معمولی تقسیم میشود که به آن تسلاسیون گفته میشود. همانطور که در بخشهای قبلی بحث شد، رویکرد باید در مورد قانون مجاورت در مورد نحوه اتصال گرههایی که شبکهها را به گرههای همسایه از طریق لبهها متصل میکنند، تصمیم بگیرد. در این سطح، ضمن در نظر گرفتن هدف سرویس، محدودیتهای عامل مانند اندازه و نوع حرکت را نیز برای تعیین پارامترهای تقسیمبندی در نظر میگیریم.
این زیربخش رویکردی است که توسط نرم افزار اختصاصی ArcGIS Pro در جعبه ابزار Indoors برای تولید شبکه های داخلی اتخاذ شده است. فضاهای قابل پیادهروی که به فضاهایی عاری از موانع و مبلمان اطلاق میشود، باید برای ترسیم شبکهای از مسیرها شناسایی شوند. چگالی یکنواخت مسیرها به کوچکترین درگاه در یک تأسیسات بستگی دارد، جهت گیری شبکه به جهت حرکت از پیش تعریف شده بستگی دارد [ ۵۸ ]. این روش زیرفاصله برای فعالیتهای ناوبری که نیاز به مکانیابی دقیق دارند، مانند شبیهسازیهای مبتنی بر عامل یا ناوبری ربات، یا توصیف گسترش و پراکندگی پدیدههای پیوسته مانند دود، آتش، و متغیرهای محیطی مناسب است.
این چارچوب پیشنهادی بر تولید داده های شبکه که روابط توپولوژیکی و سلسله مراتبی را بیان می کند، تمرکز دارد. در حالی که این روابط در ناوبری ضروری هستند، برخی از برنامه ها از ترکیب آنها با داده های هندسی بسیار سود می برند. مدلهای هندسی چند مقیاسی در این مورد مناسبترین هستند، که معمولاً از طریق مدلسازی پارامتری و رویهای تولید میشوند [ ۵۹ ]. مدلسازی پارامتری از اعمال محدودیتها برای ایجاد سطح دقیقتر استفاده میکند. اگرچه آثار مولر [ ۶۰ ، ۶۱] روی بکارگیری این پارادایمها در مدلهای معماری بیرونی متمرکز شدهاند، آنها نشان میدهند که کاربردهای متوالی عملیات، مدلهایی با واقعگرایی بالا تولید میکنند. مطالعات به کارگیری این مفهوم در تولید مدلهای BIM و CityGML [ ۶۲ ، ۶۳ ] در تولید سریع مدلهای سهبعدی، هرچند فاقد دقت هندسی، نویدبخش است.
۳٫۵٫ پیاده سازی با استفاده از مدل هسته IndoorGML
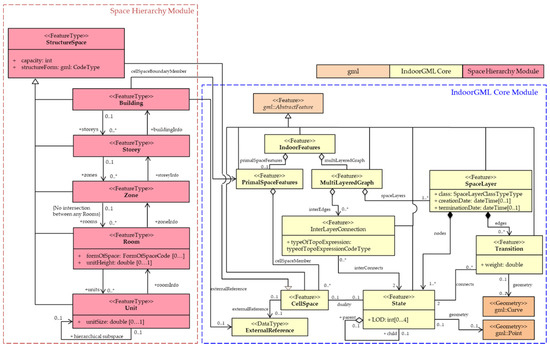
در این بخش، روابط توپولوژیکی توصیف شده در NRS را با استفاده از مدل اصلی IndoorGML رسمیت میدهیم. OGC IndoorGML را به عنوان استاندارد بین المللی برای مدل های داده ناوبری داخلی در سال ۲۰۱۴ منتشر کرد. کلاس های State و Transition به ترتیب گره و یال ها را در مدل اصلی نشان می دهند. همانطور که قبلاً بحث شد، زیرفاصلهسازی همان مدل را ایجاد میکند و شبکههای سطح پایینتر را به اندازه کافی از شبکههای سطح بالاتر متمایز میکند. با این حال، ساختار سلسله مراتبی بین یک فضا و فضاهای فرعی آن، به عنوان مثال، در سراسر سطوح، باید با گسترش روابط تعریف شده در حال حاضر نشان داده شود. شکل ۱۰ اجرای سطح جزئیات و روابط سلسله مراتبی را از طریق اصلاح مدل هسته IndoorGML از طریق یک نمودار کلاس UML نشان می دهد.
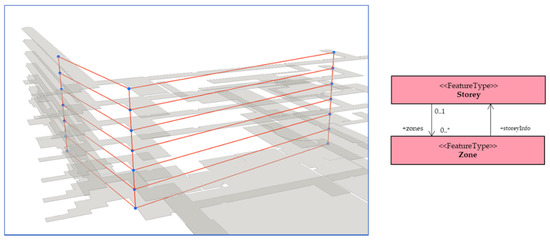
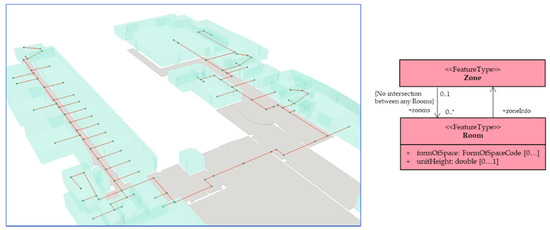
برای بیان روابط سلسله مراتبی بین فضاها، ما یک ماژول SpaceHierarchy را برای پشتیبانی از تصویر سطوح سلسله مراتبی فضا در UML پیشنهاد می کنیم. ما این ماژول را بر اساس مدل اصلی IndoorGML، استاندارد OGC برای دادههای توپولوژیکی مبتنی بر شبکه داخلی، قرار دادیم. کلاس Building کل ساختار ساخته شده را نشان می دهد و با PrimalSpace Features در هسته IndoorGML مرتبط است. کلاس Building از طبقات Story از طریق ویژگی Storey تشکیل شده است. کلاس Story که از کلاس StructureSpace به ارث رسیده است از کلاس های Zone ساخته شده است. به نوبه خود، این مناطق حاوی اتاقهای مجزای غیر همپوشانی هستند. این اتاق ها ممکن است به صورت فیزیکی یا مجازی توسط مرزها محصور شوند، بنابراین مدل می تواند فرم خود را به صورت باز، بسته، پوشیده یا نیمه باز مشخص کند.
همانطور که در بخش های قبلی بحث شد، ما یک اتاق را به فضاهای کوچکتر که توسط کلاس واحد نشان داده شده است تجزیه می کنیم. بسته به کاربرد، تقسیم اتاق به واحدها از نظر اندازه متفاوت است، بنابراین یک ویژگی unitSize را در نمودار مشخص می کنیم. فضاهای فرعی هر واحد همچنین ممکن است به زیرفضاهای کوچکتر مانند شبکه تبدیل شوند. به طور مشابه، اینها روابط سلسله مراتبی متناظری دارند، همانطور که توسط رابطه خود-همبستگی کلاس واحد نشان داده شده است.
کلاس StructureSpace از CellSpace هسته IndoorGML به ارث می رسد و حاوی اطلاعاتی در مورد ظرفیت و فرم ساختار است. از این رو، کلاسهایی که از فضای ساختار به ارث میبرند – یعنی طبقه، منطقه، اتاق و واحد – میتوانند به عنوان حالتها در مدل اصلی نمایش داده شوند. علاوه بر این، ما این کلاس ها را به عنوان یک لایه فضایی نشان می دهیم. همانطور که در شکل ۸ نشان داده شده است، ما روابط سلسله مراتبی آنها را در IndoorGML به عنوان یک InterLayerConnection در مدل Core بیان می کنیم . این مثال روابط سلسله مراتبی بین لایههای فضایی برای کلاسهای Store، Zone و Unit را نشان میدهد.
ما سطح جزئیات را از طریق بیان یک خود تجمعی از طبقه دولتی پیاده می کنیم. همانطور که در شکل ۱۰ نشان داده شده است، هر نمونه ایالتی یک والد ۰~۱ و یک فرزند ۰~n دارد. مقادیر چندگانه نشان می دهد که یک حالت ممکن است کلاس والد (در سطح ۱) نداشته باشد، اما نمی تواند بیش از یک داشته باشد. در نتیجه، یک ایالت ممکن است کلاس کودک نداشته باشد (دیگر نمی توان آن را زیرفضا کرد) یا ممکن است یک یا چند فرزند داشته باشد. ما همچنین LOD را به عنوان یک ویژگی از کلاس State بیان می کنیم. مانند قبل، کلاس Transition که لبه ها را نشان می دهد، دو کلاس State که گره ها را در یک زمان نشان می دهند، به هم متصل می کند.
۴٫ اجرای آزمایشی
در این بخش، ما یک مورد استفاده از یک فعالیت ناوبری را در مقیاسهای فضای داخلی شناسایی میکنیم تا استفاده بالقوه از دادههای شبکه سلسله مراتبی چند سطحی را نشان دهیم. با این پیاده سازی، ما زیرفاصله سلسله مراتبی یک فضای ساختمان را در LOD های تعریف شده در بخش قبل و داده های شبکه مربوطه نشان دهنده فضاهای مبتنی بر UML پیشنهادی نشان می دهیم. ما ساختمان پردیس دانشگاه را به عنوان محل آزمون انتخاب کردیم. شکل ۱۱ را ببینید . ما دادههای هندسی آزمایش را بر روی یک چند سطحی سهبعدی استوار کردیم که نمایانگر ساختمان تولید شده از نقشه توپوگرافی ۱:۵۰۰۰ و پلانهای طبقه ساختمان است. این داده ساختمان با داده های سطح ۰ در سطوح سلسله مراتبی مطابقت دارد که توسط کلاس Building در UML نشان داده شده است.
ابتدا یک شبکه سطح ۱ برای ساختمان با استفاده از فرآیند دوگانگی Poincare ایجاد کردیم. کل سطح کف به عنوان فضایی در نظر گرفته شد که توسط یک گره در این سطح نشان داده شده است. روابط اتصال بین طبقات، که از طریق راه پله بیان می شود، به عنوان یک لبه نشان داده شد. بر اساس نمودار کلاس در شکل ۱۰ ، هر یک از گره های شکل ۱۲ نمونه ای از کلاس ۱ را نشان می دهد که با کلاس Building مرتبط است. شکل ۱۲ نتیجه شبکه سطح ۱ را نشان می دهد که برای فعالیت های ناوبری طبقه به طبقه قابل اجرا است، مانند زمانی که کل سطوح طبقات مقصد مورد نظر هستند [ ۵۵ ].
بر این اساس، ساختار ساختمان در این مورد از سه بال اصلی تشکیل شده است. برای شبکه سطح ۲، هر بال ساختمان یک منطقه در نظر گرفته شد که توسط یک گره نشان داده شد. این گره های نشان داده شده در شکل ۱۳ نمونه ای از کلاس Zone در UML را نشان می دهند که از تجزیه هر گره Storey در شکل ۱۲ حاصل می شود. این شبکه، که در شکل ۱۳ نشان داده شده است، برای فعالیت های ناوبری سطح پایین تر، مانند تجزیه و تحلیل دسترسی به مناطق داخلی [ ۱۹ ] قابل استفاده است.
برای یک شبکه سطح ۳، ما هر اتاق در ساختمان را به عنوان یک گره منفرد نشان دادیم، صرف نظر از اینکه کدام بال آن را شامل می شود. ما از رویکردی مبتنی بر تبدیل محور میانه مستقیم بر اساس پلان طبقه ساختمان استفاده کردیم، مشابه آنچه در [ ۲۱ ] استفاده شده است. شکل ۱۴ شبکه حاصل را برای سطح دوم ساختمان نشان می دهد. هر ناحیه در شکل ۱۳ بیشتر به فضاهای کوچکتر تبدیل شده است که توسط گره هایی که نمونه هایی از کلاس Room از ماژول سلسله مراتب فضا هستند نشان داده شده است. این سطح از داده های شبکه معمولاً در مطالعات موجود مربوط به ناوبری داخلی [ ۲ ، ۴۰ ، ۶۴ ، ۶۵ ، ۶۶ ظاهر می شود.] زیرا گره ها اتاق ها را به عنوان عنصر اساسی فضای داخلی نشان می دهند.
ما برای سادگی و راحتی بخشی از طبقه دوم را برای سطح بعدی انتخاب کردیم. این تصمیم به این دلیل گرفته شد که این بخش از ساختمان به اتاقهای بال جنوبی متصل میشود. از آنجایی که این یک لابی باز است، این بخش تنها به عنوان یک گره در داده های سطح ۳ نشان داده می شود که کل بال را پوشش می دهد. برای نشان دادن تولید یک شبکه سطح ۴، ما به زیر فاصله گذاری این ناحیه اقدام کردیم. منطقه انتخاب شده شامل لابی ساختمان و بخش وسیعی از راهرو است که در شکل ۱۵ نشان داده شده است.
ما یک روش زیرفاصلهسازی را برای لابی نامنظم از طریق نمودارهای Voronoi اجرا کردیم. ما نمودار را از نقاط ایجاد شده از تقاطع های خط مرکزی چند ضلعی و پیش بینی ها به سمت داخل رئوس ساختیم. علاوه بر این، در شکل ۱۵ ، لبه های ایجاد شده از نمودار در لابی ساختمان و بخش وسیع راهرو در امتداد شبکه سطح ۳ به تصویر کشیده شده است تا نمایش کامل تری از مسیرهای پایین لابی را نشان دهد. گرههای شبکه نمونهای از کلاس Unit را نشان میدهند که از تجزیه نمونه نوع لابی کلاس Room حاصل میشود.
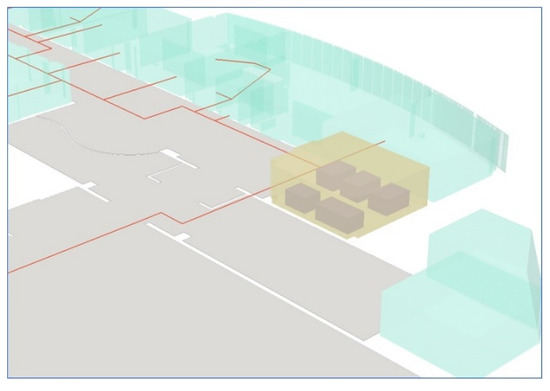
برای نشان دادن مورد دیگری از شبکه سطح ۴، ما یک اتاق جلسه را در همان طبقه، مجاور لابی ساختمان در مثال قبلی انتخاب کردیم. همانطور که در شکل ۱۶ نشان داده شده است ، در داخل اتاق (به رنگ زرد) مبلمان (به رنگ بنفش) وجود دارد که ممکن است به عنوان مانعی برای ناوبری عمل کند. عوامل ناوبری مختلف می توانند از فضای آزاد در همان اتاق عبور کنند، همانطور که در شکل ۱ نشان داده شده است. ما تولید شبکههای ناوبری مناسب برای انسانها، کاربران ویلچر و روباتهای مستقل را برای موارد زیر نشان میدهیم.
برای نشان دادن مسیر عوامل انسانی در داخل اتاق، از رویکردی مشابه با تولید شبکه های سطح ۳ استفاده کردیم. انسان ها به راهنمایی ناوبری و دقت کمتری در فضای داخلی نیاز دارند. از این رو، فضاهای فرعی ممکن است از نظر اندازه بزرگتر باشند. چیدمان مبلمان داخل اتاق شبیه یک نوع راهرو برای فضای آزاد باقی مانده است. از این رو، همانطور که در شکل ۱۷ نشان داده شده است ، ما شبکه را با رویکردی مشابه SMAT تولید کردیم.
از سوی دیگر، کاربران ویلچر هنگام حرکت در فضاهای داخلی به راهنمایی بیشتری نیاز دارند. این شرایط به این معنی است که یک اتاق باید به واحدهای کوچکتر تقسیم شود، که منجر به شبکه ای دقیق تر از شبکه های در نظر گرفته شده برای عوامل انسانی می شود. در عین حال، مبلمان همچنین موانعی را برای استفاده کنندگان از ویلچر ایجاد می کند که باید به طور مناسب در فاصله گذاری در نظر گرفته شود. به دنبال رویکرد Geraerts (2010)، رئوس ردپای باقی مانده مبنایی برای ایجاد یک نقشه راهروی ضمنی (سمت چپ) بود. از این راهرو، یک بافر Z رسم کردیم تا یک مرحله نازکسازی را اجرا کنیم تا شبکه نشاندهنده مسیر در فضای آزاد باشد. شکل ۱۸شبکه حاصل را به رنگ قرمز نشان می دهد. ما شبکه به دست آمده را به شبکه سطح ۴ که برای لابی ایجاد شده است وصل کردیم زیرا آنها در یک سطح هستند.
مکان یابی دقیق تری برای حرکت روباتی در اتاق ضروری است که به فضاهای فرعی کوچکتر نیاز دارد. ما یک شبکه سطح ۴ را با تقسیم همان اتاق به شبکه هایی با اندازه های مساوی ایجاد کردیم تا مورد دیگری از زیرفاصله کردن یک اتاق به واحدها را نشان دهیم. یک گره نشان دهنده هر شبکه در مرکز آن است. در نتیجه، همانطور که در شکل ۱۹ نشان داده شده است ، با استفاده از مجاورت مورد Rook، لبه های متناظری را برای تشکیل شبکه ایجاد کردیم. به همین ترتیب، این ممکن است به شبکه لابی متصل شود زیرا آنها به طور مشابه شبکه های سطح ۴ هستند.
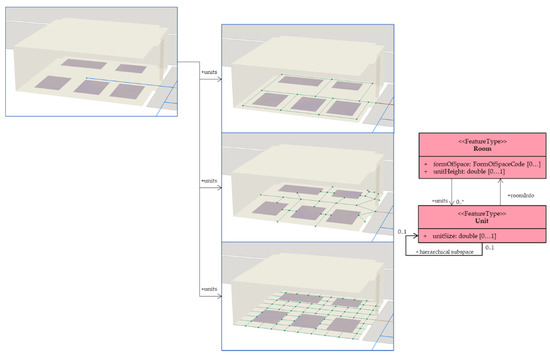
شکل ۲۰ سه نوع شبکه سطح ۴ را که ممکن است فضای اتاق یکسانی را نشان دهند، خلاصه می کند. گره نشان دهنده اتاق و نمونه ای از کلاس Room در UML، در شبکه سطح ۳ بسته به عامل ناوبری در نظر گرفته شده، به طور متفاوتی زیرفضا قرار گرفت. گره های شبکه سطح ۴ نمونه هایی از کلاس Unit هستند که فضاهای کوچکتری را در اتاق ها نشان می دهند. این تصاویر دقیق از مسیر قابل کشتیرانی شبکه، ناوبری را قادر می سازد تا به سمت فضای داخلی اتاق ها گسترش یابد، که برنامه های کاربردی مسیرهای داخلی اغلب نادیده می گیرند. این نوع شبکهها همچنین امکان ناوبری در فضاهای بزرگ و در نتیجه پیشبینی بهتر مسیرها، استفاده از مناطق عملکردی و در نظر گرفتن حرکت واقعی انسان را فراهم میکنند [ ۲۲ ].]. علاوه بر این، یک خود تداعی کلاس Unit سه نوع شبکه سطح ۴ را در مدل بیان می کند.
در این پیاده سازی، ما اجرای چارچوب زیرفاصله پیشنهادی را با استفاده از داده های نمونه نشان دادیم. با استفاده از داده های هندسی از یک ساختمان، ما داده های شبکه را برای هر سطح از جزئیات با استفاده از زیرفاصله های مشخص شده و روش های تولید شبکه مربوطه تولید کردیم. شبکه های تولید شده برای سطوح ۱، سطح ۲، سطح ۳ و سطح ۴ داده های شبکه حاوی سطوح مختلفی از جزئیات را در توصیف فضاهای ساختمان نشان دادند. به طور مشابه، با در نظر گرفتن موارد استفاده احتمالی از لابی و فضای داخلی یک اتاق، تولید چندین نوع زیرفاصله فضای اتاق را نشان دادیم. فضای فرعی نشان داده شده برای اتاق، سه روش مختلف تقسیم بندی یک فضا را با در نظر گرفتن امکانات داخلی و عوامل ناوبری مختلف نشان می دهد.
۵٫ نتیجه گیری ها
از آنجایی که الزامات دادههای فضایی داخلی با افزایش علاقه به برنامههای مرتبط با LBS افزایش مییابد، الگوریتمها باید این خواستهها را برطرف کنند تا با چالشهای نمایش فضاهای پیچیده و متنوع همگام شوند. به خصوص در کاربردهای ناوبری، اطلاعات توپولوژیکی برای انجام تجزیه و تحلیل فضایی در فضای داخلی سه بعدی حیاتی است. مطالعات متعددی به تولید داده های شبکه توپولوژیکی پرداخته اند، مانند NRS که روابط اتصال لازم برای تجزیه و تحلیل شبکه داخلی را نشان می دهد. NRS اساس استاندارد داده های مکانی تثبیت شده از طریق IndoorGML است. با این حال، ادبیات در بازنمایی رابطه سلسله مراتبی فضاهای داخلی علیرغم اینکه یک ویژگی ذاتی و ضروری است که می تواند تحلیل فضایی را بهتر تسهیل کند، کم بوده است.
این مقاله به مشکل چگونگی نمایش ویژگیهای سلسله مراتبی فضاهای داخلی با پیشنهاد چارچوبی برای تولید دادههای شبکه چند سطحی برای نشان دادن روابط فضایی میپردازد. علاوه بر روابط فضایی بین فضاها در یک سطح، ما همچنین رابطه سلسله مراتبی فضاهای بین آنها را تعریف کردیم. ما سلسله مراتب فضایی را از طریق فرآیند زیرفضاسازی یا تجزیه فضای داخلی ایجاد کردیم تا یک شبکه فرعی مطابق با روابط توپولوژیکی بین زیرفضاهای حاصل ایجاد کنیم. ما محدودیتهای مناسبی را شناسایی کردیم که بر زیرفاصلهسازی و الگوریتمهای تجزیه فضا متعاقب آن با توجه به سطح هدف اطلاعات هر سطح سلسله مراتبی تأثیر میگذارد. این تعریف سطح، همراه با رویههای تولید شبکه، چارچوب پیشنهادی برای تولید داده های توپولوژیکی سلسله مراتبی فضای داخلی را شامل می شود. سطوح سلسله مراتبی تعریف شده، تصاویر متفاوتی از یک فضا را تسهیل می کند تا تجزیه و تحلیل های مربوط به درجات جزئیات را امکان پذیر کند.
علاوه بر این، این مطالعه همچنین اجرای روابط سلسله مراتبی را از طریق یک نمودار کلاس UML از طریق توسعه مدل هسته IndoorGML نشان می دهد. بر این اساس، ما استفاده بالقوه چارچوب پیشنهادی را با اجرای دادههای نمونه که یک ساختمان را به تصویر میکشد، نشان دادیم. ما دادههای شبکه نمونه را بر اساس سطوح پیشنهادی سلسله مراتب، با هدایت برنامه افزودنی IndoorGML پیشنهادی، تولید کردیم. به طور خاص، برای سطح ۴، ما برخی از موارد استفاده ممکن را برای زیرفاصله کردن همان فضا در همان سطح بسته به برنامه نشان دادیم.
این مطالعه دارای محدودیت هایی بود که تحقیقات آتی باید به آنها توجه کند. اول، بخش پیاده سازی فقط بر روی تولید شبکه ها متمرکز بود. از این رو، نیاز به پیاده سازی نمونه های ناوبری واقعی در سطوح مختلف سلسله مراتب شبکه وجود دارد. خودکارسازی فرآیند زیرفاصلهسازی در سطوح میتواند از مدلسازی رویهای و پارامتریک سود زیادی ببرد. این الگوهای مدلسازی ممکن است به تولید مدلهای هندسی سه بعدی پیشرفتهای که شبکه سلسله مراتبی پیشنهادی ما را تکمیل میکنند، کمک کند. علاوه بر این، مطالعات آتی بر ارزیابی بیشتر و اصلاح چارچوب پیشنهادی زیرفضا، از جمله شناسایی موارد استفاده بیشتر و اجرا در انواع دیگر فضاهای داخلی متمرکز خواهد شد.
منابع
- کوان، ام.-پی. لی، جی. پاسخ اضطراری پس از ۱۱ سپتامبر: پتانسیل GIS سه بعدی بلادرنگ برای واکنش سریع اضطراری در محیطهای ریز فضایی. محاسبه کنید. محیط زیست سیستم شهری ۲۰۰۵ ، ۲۹ ، ۹۳-۱۱۳٫ [ Google Scholar ] [ CrossRef ]
- لی، جی. کوان، ام.-پی. یک مدل داده ترکیبی برای نمایش روابط توپولوژیکی بین ویژگیهای جغرافیایی سه بعدی در محیطهای ریز فضایی. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۵ ، ۱۹ ، ۱۰۳۹-۱۰۵۶٫ [ Google Scholar ] [ CrossRef ]
- OGC (کنسرسیوم فضایی باز). IndoorGML نسخه ۱٫۱٫ در دسترس آنلاین: https://docs.ogc.org/is/19-011r4/19-011r4.html (دسترسی در ۱۴ نوامبر ۲۰۲۱).
- لی، اس. لی، جی. اعتبارسنجی مدل داده های توپولوژیکی کارآمد برای پرس و جوهای فضایی سه بعدی. جی کره اسپات. Inf. Soc. ۲۰۱۱ ، ۱۹ ، ۹۳-۱۰۵٫ [ Google Scholar ]
- Diakité، AA; زلاتانوا، S. تقسیم بندی فضایی محیط های داخلی پیچیده برای ناوبری سه بعدی داخلی. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۸ ، ۳۲ ، ۲۱۳-۲۳۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خان، ع.ا. کلبه، تی. محدودیتهای خان، AA و نقش آنها در زیرفاصلهسازی انواع حرکت در ناوبری داخلی در مجموعه مقالات کنفرانس بین المللی ۲۰۱۲ در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، سیدنی، استرالیا، ۳ تا ۱۵ نوامبر ۲۰۱۲٫ صص ۱-۱۲٫ [ Google Scholar ]
- لی، ایکس. کلارامونت، سی. Ray, C. یک مدل مبتنی بر گراف شبکه ای برای تجزیه و تحلیل فضاهای داخلی دو بعدی. محاسبه کنید. محیط زیست سیستم شهری ۲۰۱۰ ، ۳۴ ، ۵۳۲-۵۴۰٫ [ Google Scholar ] [ CrossRef ]
- لی، اس. Lee, J. مدل های داده های توپولوژیکی کارآمد برای پرس و جوهای فضایی در GIS سه بعدی. در مجموعه مقالات داده های جغرافیایی و تجسم جغرافیایی: محیط زیست، امنیت و جامعه، سمپوزیوم مشترک ویژه کمیسیون IV ISPRS و AutoCarto، انجمن بین المللی عکس-گرامتری و سنجش از دور (ISPRS)، اورلاندو، فلوریدا، ایالات متحده آمریکا، ۱۵ تا ۱۹ نوامبر ۲۰۱ [ Google Scholar ]
- لی، جی. یک مدل داده قابل هدایت سه بعدی برای پشتیبانی از واکنش اضطراری در محیط های ساخته شده ریزفضایی. ان دانشیار صبح. Geogr. ۲۰۰۷ ، ۹۷ ، ۵۱۲-۵۲۹٫ [ Google Scholar ] [ CrossRef ]
- ایلول، سی. هاکلی، م. Haklay, M. الزامات توپولوژی در GIS سه بعدی. ترانس. GIS ۲۰۰۶ ، ۱۰ ، ۱۵۷-۱۷۵٫ [ Google Scholar ] [ CrossRef ]
- جمالی، ع. عبدالرحمن، ع. بوگوسلاوسکی، پ. کومار، پی. Gold, CM مدلسازی سه بعدی خودکار شبکه ناوبری داخلی توپولوژیکی. جئوژورنال ۲۰۱۷ ، ۸۲ ، ۱۵۷–۱۷۰٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Worboys، M. مدلسازی فضای داخلی. در مجموعه مقالات سومین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی-ISA ’11، شیکاگو، IL، ایالات متحده آمریکا، ۱ نوامبر ۲۰۱۱; صص ۱-۶٫ [ Google Scholar ]
- زلاتانوا، اس. استوتر، جی. Isikdag، استانداردهای ایالات متحده برای تبادل و ذخیره اطلاعات سه بعدی: چالش ها و فرصت ها برای واکنش اضطراری. در مجموعه مقالات چهارمین کنفرانس بین المللی کارتوگرافی و GIS، آلبنا، بلغارستان، ۱۸ تا ۲۲ ژوئن ۲۰۱۲٫ جلد ۲، ص ۱۷-۲۸٫ [ Google Scholar ]
- Molenaar، M. توپولوژی برای نقشه های برداری سه بعدی. ITC J. ۱۹۹۲ ، ۱ ، ۲۵-۳۳٫ [ Google Scholar ]
- زلاتانوا، اس. رحمان، ع.ا. Shi, W. مدلها و چارچوبهای توپولوژیکی برای اشیاء فضایی سه بعدی. محاسبه کنید. Geosci. ۲۰۰۴ ، ۳۰ ، ۴۱۹-۴۲۸٫ [ Google Scholar ] [ CrossRef ]
- زلاتانوا، S. GIS سه بعدی برای توسعه شهری. دکتری پایان نامه، موسسه بین المللی بررسی هوافضا و علوم زمین (ITC)، سری پایان نامه های ITC شماره ۶۹٫ Enschede، هلند، ۲۰۰۰٫ ISBN 9061641780. [ Google Scholar ]
- زلاتانوا، اس. رحمان، ع.ا. Pilouk, M. 3D GIS: Current Status and Perspectives. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. Sci.-ISPRS Arch. ۲۰۰۲ ، ۳۴ ، ۶۶-۷۱٫ [ Google Scholar ]
- اسمیت، مدل های صف وابسته به ایالت JM در شبکه های تخلیه اضطراری ترانسپ Res. روش قسمت B. ۱۹۹۱ ، ۲۵ ، ۳۷۳-۳۸۹٫ [ Google Scholar ] [ CrossRef ]
- دائو، THD; تیل، جی.-سی. ممیزی دسترسی سه بعدی شبکه داخلی برای طراحی پلان طبقه. ترانس. GIS ۲۰۱۸ ، ۲۲ ، ۲۸۸-۳۱۰٫ [ Google Scholar ] [ CrossRef ]
- چوی، جی دبلیو. کوون، دی. هوانگ، جی. Lertlakkhanakul، J. مدیریت زمان واقعی اطلاعات فضایی طراحی: یک نمایش پلان طبقه مبتنی بر فضا از ساختمان ها. خودکار ساخت و ساز ۲۰۰۷ ، ۱۶ ، ۴۴۹-۴۵۹٫ [ Google Scholar ] [ CrossRef ]
- لی، جی. پیادهسازی مبتنی بر دسترسی مکانی یک مدل داده توپولوژیکی سه بعدی GIS برای نهادهای شهری. GeoInformatica ۲۰۰۴ ، ۸ ، ۲۳۷-۲۶۴٫ [ Google Scholar ] [ CrossRef ]
- کرومینایته، ام. زلاتانوا، S. بخش فضای داخلی برای ناوبری داخلی. در مجموعه مقالات ششمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی-ISA ’14، دالاس/فورت ورث، تگزاس، ایالات متحده آمریکا، ۴ نوامبر ۲۰۱۴٫ صص ۲۵-۳۱٫ [ Google Scholar ]
- نمودارهای Aurenhammer، F. Voronoi – بررسی یک ساختار داده هندسی اساسی. کامپیوتر ACM. Surv. ۱۹۹۱ ، ۲۳ ، ۳۴۵-۴۰۵٫ [ Google Scholar ] [ CrossRef ]
- لین، ز. ژانگ، اس. Yan, G. یک الگوریتم استقرار افزایشی برای شبکههای حسگر بیسیم با استفاده از یک یا چند عامل مستقل. Ad Hoc Netw. ۲۰۱۳ ، ۱۱ ، ۳۵۵-۳۶۷٫ [ Google Scholar ] [ CrossRef ]
- بولوسو، ن. هایدمن، جی. Estrin، D. قرار دادن چراغ تطبیقی. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی سیستم های محاسباتی توزیع شده، مسا، AZ، ایالات متحده آمریکا، ۱۶-۱۹ آوریل ۲۰۰۲; ص ۴۸۹-۴۹۸٫ [ Google Scholar ]
- موخوپادهایای، ع. روی، اس. Mukherjee, N. رویکردی برای قرار دادن چراغ و مسیریابی مبتنی بر چراغ به سمت سینک موبایل در WSN. در مجموعه مقالات کنفرانس بین المللی فناوری اطلاعات CUBE در CUBE ’12، پونا، هند، ۳ تا ۵ سپتامبر ۲۰۱۲٫ صص ۱۴۹-۱۵۴٫ [ Google Scholar ]
- وانگ، Y.-C. هو، سی.-سی. Tseng، Y.-C. الگوریتمهای استقرار کارآمد برای اطمینان از پوشش و اتصال شبکههای حسگر بیسیم. در مجموعه مقالات اولین کنفرانس بین المللی اینترنت بی سیم (WICON’05)، بوداپست، مجارستان، ۱۰-۱۵ ژوئیه ۲۰۰۵; صص ۱۱۴-۱۲۱٫ [ Google Scholar ]
- زلاتانوا، اس. لیو، ال. Sithole, G. چارچوب مفهومی تقسیم فضا برای ناوبری داخلی. در مجموعه مقالات پنجمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی-ISA ’13، اورلاندو، FL، ایالات متحده آمریکا، ۵ نوامبر ۲۰۱۳; صص ۳۷-۴۱٫ [ Google Scholar ]
- خان، ع.ا. دوناوبائر، آ. Kolbe، TH یک فرآیند تبدیل چند مرحلهای برای تولید خودکار نمودارهای مسیریابی داخلی از مدلهای ساختمانی سه بعدی معنایی موجود. در مجموعه مقالات نهمین کنفرانس ۳DGeoInfo 2014، دبی، امارات متحده عربی، ۱۱ تا ۱۳ نوامبر ۲۰۱۴٫ [ Google Scholar ]
- Giudice, NA; والتون، لس آنجلس؛ Worboys، M. انفورماتیک فضای داخلی و خارجی: یک دستور کار تحقیقاتی. در مجموعه مقالات دومین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی (ISA 2010)، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، ۲ نوامبر ۲۰۱۰٫ ص ۴۷-۵۳٫ [ Google Scholar ]
- یان، جی. Diakité، AA; زلاتانوا، اس. چارچوب تعریف فضای عمومی برای پشتیبانی از سیستمهای ناوبری بدون درز داخلی/خارجی. ترانس. GIS ۲۰۱۹ ، ۲۳ ، ۱۲۷۳-۱۲۹۵٫ [ Google Scholar ] [ CrossRef ]
- Claridades، ARC; Lee, J. تعریف مدلی برای یکپارچه سازی داده های شبکه داخلی و خارجی برای پشتیبانی از برنامه های ناوبری بدون درز. ISPRS Int. J. Geo-Inf. ۲۰۲۱ ، ۱۰ ، ۵۶۵٫ [ Google Scholar ] [ CrossRef ]
- متعجب.؛ لی، دی.-ال. مدلسازی مکان معنایی برای ناوبری مکان در محیط موبایل در مجموعه مقالات کنفرانس بین المللی IEEE در مورد مدیریت داده های تلفن همراه، بریزبن، استرالیا، ۱۴ تا ۱۸ ژوئیه ۲۰۱۴٫ صص ۵۲-۶۱٫ [ Google Scholar ]
- Worboys, M. The Maptree: A Fine-Grained Formal Representation of Space. لکت. یادداشت ها محاسبه. علمی ۲۰۱۲ ، ۷۴۷۸ LNCS ، ۲۹۸–۳۱۰٫ [ Google Scholar ] [ CrossRef ]
- وو، ی. شانگ، جی. هو، ایکس. Zhou، Z. نقشه درختی توسعه یافته: نمایشی از توپولوژی ریزدانه و سلسله مراتب فضایی bim. ISPRS-Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۷ ، XLII-2/W7 ، ۴۰۹–۴۱۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- OGC (کنسرسیوم فضایی باز). Future City Pilot-1: استفاده از IFC/CityGML در گزارش مهندسی برنامه ریزی شهری . OGC: Rockville, MD, USA, 2017. [ Google Scholar ]
- OGC (کنسرسیوم فضایی باز). استانداردهای داده های محیطی ساخته شده و ادغام آنها: تجزیه و تحلیل IFC، CityGML و LandInfra v.1.1. در دسترس آنلاین: https://www.buildingsmart.org/buildingsmart-international-bsi-and-open-geospatial-consortium-ogc-release-bim-and-gis-integration-paper/ (دسترسی در ۱۴ نوامبر ۲۰۲۱).
- کیم، ام. چوی، اچ اس. لی، جی. تحلیل مقایسه ای مدل های ساختمان برای توسعه یک مدل ویژگی عمومی داخلی. J. کره ای Soc. Surv. Geod. فتوگرام کارتوگر. ۲۰۲۱ ، ۳۹ ، ۲۹۷-۳۱۱٫ [ Google Scholar ] [ CrossRef ]
- یوان، ال. Zizhang, H. 3D Indoor Navigation: چارچوبی از ترکیب BIM با ۳D GIS. در مجموعه مقالات چهل و چهارمین کنگره بین المللی جامعه برنامه ریزان شهری و منطقه ای (ISOCAP)، دالیان، چین، ۱۹ تا ۲۳ سپتامبر ۲۰۰۸٫ صص ۱-۱۰٫ [ Google Scholar ]
- تئو، T.-A. چو، ک.-اچ. مدل شبکه داخلی مبتنی بر BIM برای برنامه ریزی مسیر ترکیبی داخلی و خارجی. Adv. مهندس به اطلاع رساندن. ۲۰۱۶ ، ۳۰ ، ۲۶۸-۲۸۲٫ [ Google Scholar ] [ CrossRef ]
- Siemiątkowska، B. هاراسیموویچ-بوجو، بی. پرزیبلسکی، م. Różańska-Walczuk، M. ویشنیوفسکی، ام. Kowalski، M. BIM سیستم ناوبری داخلی ربات سیار هرمس. در رمانسی ۱۹-طراحی، دینامیک و کنترل ربات: مجموعه مقالات نوزدهمین سمپوزیوم CISM-Iftomm ; Padois, V., Bidaud, P., Khatib, O., Eds.; Springer: وین، اتریش، ۲۰۱۳; صص ۳۷۵-۳۸۲٫ [ Google Scholar ]
- فریرا، جی سی. Resende، R. Martinho، S. Beacons و BIM Models for Indoor Guidance and Location. Sensors ۲۰۱۸ , ۱۸ , ۴۳۷۴٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ایسیکداغ، یو. زلاتانوا، اس. Underwood، J. یک مدل BIM-oriented برای پشتیبانی از الزامات ناوبری داخلی. محاسبه کنید. محیط زیست سیستم شهری ۲۰۱۳ ، ۴۱ ، ۱۱۲-۱۲۳٫ [ Google Scholar ] [ CrossRef ]
- OGC. زبان نشانه گذاری جغرافیای شهر OGC (CityGML) کدگذاری استاندارد ۲٫۰٫۰، استاندارد OGC 12-019. ۲۰۱۲٫ در دسترس آنلاین: https://www.ogc.org/standards/citygml (در ۱ ژوئن ۲۰۲۰ قابل دسترسی است).
- تانگ، ال. لی، ال. یینگ، اس. Lei, Y. مشخصات کامل سطح جزئیات برای مدلهای ساختمانهای سه بعدی با ترکیب صحنههای داخلی و خارجی. ISPRS Int. J. Geo-Inf. ۲۰۱۸ ، ۷ ، ۴۱۹٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- تانگ، ال. یینگ، اس. لی، ال. بیلجکی، اف. زو، اچ. زو، ی. یانگ، اف. Su, F. یک الگوی مدلسازی LOD مبتنی بر کاربرد برای مدلهای ساختمان سه بعدی. ISPRS J. Photogramm. Remote Sens. ۲۰۲۰ , ۱۶۱ , ۱۹۴–۲۰۷٫ [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. مشخصات LOD بهبود یافته برای مدل های ساختمان سه بعدی. محاسبه کنید. محیط زیست سیستم شهری ۲۰۱۶ ، ۵۹ ، ۲۵-۳۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کانگ، H.-Y. لی، جی. مطالعه بر روی مدل LOD (سطح جزئیات) برای کاربردها بر اساس داده های فضای داخلی. J. کره ای Soc. Surv. Geod. فتوگرام کارتوگر. ۲۰۱۴ ، ۳۲ ، ۱۴۳-۱۵۱٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یونگ، اچ. کانگ، اچ. لی، جی. مفاهیم سطح جزئیات در مدلهای سه بعدی داخلی. در مجموعه مقالات هفته کاری FIG 2016، کرایست چرچ، نیوزلند، ۲ تا ۶ مه ۲۰۱۶٫ [ Google Scholar ]
- کانگ، هی. نام، SK; هوانگ، جی آر. مدل لی، JY LOD (سطح جزئیات) برای استفاده از داده های فضایی داخلی. J. کره ای Soc. Surv. Geod. فتوگرام کارتوگر. ۲۰۱۸ ، ۳۶ ، ۵۴۵-۵۵۴٫ [ Google Scholar ] [ CrossRef ]
- پارک، جی. Lee, J. ایجاد LOD مورد نیاز و دقت موقعیتیابی برای کاربردهای اطلاعات فضایی داخلی در کارهای اداری عمومی. J. کره ای Soc. Surv. Geod. فتوگرام کارتوگر. ۲۰۱۷ ، ۳۵ ، ۱۰۳-۱۱۲٫ [ Google Scholar ] [ CrossRef ]
- کلاس های بنیاد بین المللی صنعت BuildingSmart (IFC4.3.RC4). در دسترس آنلاین: https://standards.buildingsmart.org/IFC/DEV/IFC4_3/RC1/HTML/ (دسترسی در ۱۴ نوامبر ۲۰۲۱).
- کانگ، هی. یونگ، اچ.-جی. Lee, J. A Study of Subspacing Strategy for Service Applications in Indoor Space. جی کره اسپات. Inf. Soc. ۲۰۱۵ ، ۲۳ ، ۱۱۳-۱۲۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یونگ، اچ. Lee, J. زیرفاصله داخلی برای پیاده سازی indoorgml برای ناوبری داخلی. ISPRS-Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۵ ، XL-2/W4 ، ۲۵–۲۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Claridades، ARC; چوی، اچ اس. لی، جی. ایجاد الزامات زیرفاصله داخلی یک مدل لود (سطح جزئیات) برای تولید داده های توپولوژیکی مبتنی بر شبکه. ISPRS-Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۲۱ ، ۴۶ ، ۹۷-۱۰۲٫ [ Google Scholar ] [ CrossRef ]
- خو، ام. وی، اس. زلاتانوا، اس. رویکرد ناوبری داخلی با در نظر گرفتن موانع و تقسیم فضایی طرح دوبعدی. ISPRS-Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۶ ، ۴۱ ، ۳۳۹-۳۴۶٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لوید، سی. تجزیه و تحلیل داده های مکانی: مقدمه ای برای کاربران GIS . انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، ۲۰۱۰; ISBN 9780199554324. [ Google Scholar ]
- ESRI ایجاد شبکه داخلی: ArcGIS Indoors. در دسترس آنلاین: https://pro.arcgis.com/en/pro-app/latest/help/data/indoors/create-the-indoors-network.htm (دسترسی در ۱۴ نوامبر ۲۰۲۱).
- بورمان، ا. جی، ی. Jubierre, JR; Flurl، M. مدلسازی رویهای: رویکردی جدید برای طراحی چند مقیاسی در پروژههای زیرساختی. در مجموعه مقالات گروه اروپایی برای محاسبات هوشمند در مهندسی، EG-ICE 2012-کارگاه بین المللی: محاسبات هوشمند در مهندسی عمران، هرشینگ، آلمان، ۴ تا ۶ ژوئیه ۲۰۱۲٫ [ Google Scholar ]
- مولر، پی. ونکا، پی. هیگلر، اس. اولمر، ا. Van Gool, L. مدلسازی رویه ای ساختمان ها. ACM Trans. نمودار. ۲۰۰۶ ، ۲۵ ، ۶۱۴-۶۲۳٫ [ Google Scholar ] [ CrossRef ]
- بنش، ج. کلی، تی. دشترنکو، اف. کریوانک، جی. مولر، پی. در مورد رئالیسم مدلهای رویهای معماری. محاسبه کنید. نمودار. انجمن ۲۰۱۷ ، ۳۶ ، ۲۲۵–۲۳۴٫ [ Google Scholar ] [ CrossRef ]
- بورمان، ا. کلبه، تی. دوناوبائر، آ. استیور، اچ. ژبیر، ج. Flurl، M. مدلسازی هندسی معنایی چند مقیاسی تونلهای سپر برای کاربردهای GIS و BIM. محاسبه کنید. مدنی زیرساخت. مهندس ۲۰۱۴ ، ۳۰ ، ۲۶۳-۲۸۱٫ [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. تولید مدلهای سه بعدی شهر چندگانه در citygml با موتور مدلسازی رویهای تصادفی۳dcity. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۶ ، IV-4/W1 ، ۵۱-۵۹٫ [ Google Scholar ] [ CrossRef ]
- تشکوری، ح. رجبی فرد، ع. کلانتری، م. مدل فضایی سه بعدی داخلی/خارجی جدید برای تسهیل پاسخ اضطراری داخلی. ساختن. محیط زیست ۲۰۱۵ ، ۸۹ ، ۱۷۰-۱۸۲٫ [ Google Scholar ] [ CrossRef ]
- میروهابی، س.س. عباسپور، RA استخراج خودکار مدل هسته indoorgml از OpenStreetMap. ISPRS-Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ۲۰۱۵ ، XL-1/W5 ، ۴۵۹–۴۶۲٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Claridades، AR; پارک، آی. لی، جی. یکپارچه سازی داده های IndoorGML و POI داخلی برای کاربردهای ناوبری در فضای داخلی. J. کره ای Soc. Surv. Geod. فتوگرام کارتوگر. ۲۰۱۹ ، ۳۷ ، ۳۵۹-۳۶۶٫ [ Google Scholar ] [ CrossRef ]
شکل ۱٫ ساکنان مختلف ناوبری فضای داخلی.
شکل ۲٫ سلسله مراتب سطوح فضای داخلی در یک ساختمان.

شکل ۳٫ تقسیم بندی یک اتاق به واحدهای کوچکتر.
شکل ۴٫ نمایش NRS از فضای داخلی ۳ بعدی.

شکل ۵٫ سطوح جزئیات برای نمایش شبکه های ناوبری داخلی [ ۵۵ ].
شکل ۶٫ موارد مجاورت برای تعریف اتصال شبکه ها.
شکل ۷٫ سلسله مراتب فضایی اعمال شده به شبکه LOD.
شکل ۸٫ ارتباط بین لایه ها بین لایه های فضایی که هر سطح سلسله مراتبی را نشان می دهد.
شکل ۹٫ چارچوبی برای تولید یک شبکه ناوبری داخلی سلسله مراتبی چند سطحی.
شکل ۱۰٫ نمودار کلاس UML برای ماژول الحاقی IndoorGML برای نمایش روابط سلسله مراتبی.

شکل ۱۱٫ منطقه مورد مطالعه برای اجرای مورد استفاده.
شکل ۱۲٫ داده های شبکه سطح ۱ که سطوح طبقه ساختمان را نشان می دهد.
شکل ۱۳٫ داده های شبکه سطح ۲ نشان دهنده مناطق در هر سطح طبقه.
شکل ۱۴٫ داده های شبکه سطح ۳ نشان دهنده مسیرهای اتاق های داخل ساختمان است.

شکل ۱۵٫ داده های شبکه سطح ۳ که مسیرهای داخل یک لابی را نشان می دهد.
شکل ۱۶٫ اتاق انتخاب شده برای تولید شبکه سطح ۴ با در نظر گرفتن امکانات.
شکل ۱۷٫ ایجاد یک شبکه سطح ۴ برای یک اتاق با مبلمان با استفاده از SMAT.
شکل ۱۸٫ ایجاد یک شبکه سطح ۴ برای یک اتاق با استفاده از بافر Z.
شکل ۱۹٫ ایجاد یک شبکه سطح ۴ برای همان اتاق با استفاده از تسلاسیون.
شکل ۲۰٫ رابطه خود-همبستگی کلاس Unit برای انعکاس انواع مختلف شبکه ها برای فضای واحد یکسان.