
کلید واژه ها:
شرح مکان ؛ ابهام ; معناشناسی ابرارزشیابی ; محل موقعیت یابی
۱٫ مقدمه
- (۱)
-
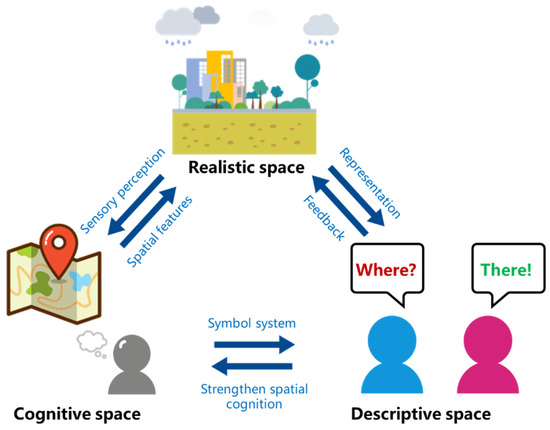
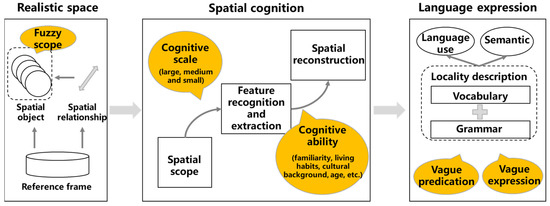
ساخت مدل بازنمایی توصیف مکان مبهم با در نظر گرفتن چند عامل. بر اساس مکانیسم شناختی مکان مکانی، یک چارچوب یکپارچه از توصیف مکان مکانی پیشنهاد شده است که سه عامل شناختی زیر را تعریف می کند: چارچوب مرجع، شی فضایی و رابطه فضایی. این چارچوب برای نشان دادن مبهم بودن سطوح مختلف شناختی و انتزاعی در توصیف مکان استفاده می شود. متفاوت از مدلسازی اطلاعات مکانی سنتی، که بر روابط فضایی تمرکز دارد، این مقاله رابطه ابهام و تأثیر را بین عوامل اطلاعاتی مختلف با استراتژی بازنمایی چند عاملی ایجاد میکند. این نه تنها منبع ابهام در توصیف مکان را به طور جامع تری برطرف می کند،
- (۲)
-
یک روش موقعیتیابی مبتنی بر نظریه ابرارزشگذاری برای توصیف مکان فضایی مبهم پیشنهاد شده است. بر اساس اصول اساسی معناشناسی ابرارزشگذاری، مدلهای دقیقسازی محمولهای مبهم برای شی فضایی و رابطه فضایی ساخته شدهاند. از سه جنبه گسترش، ضد گسترش و نیم سایه، محدوده آستانه نقطه برش در مدل دقیق با توجه به زمینه توصیف مکان تنظیم می شود تا نتایج دقیق را در موقعیت های مختلف به دست آورد. توصیف مکان به عنوان بیان نتیجه شناخت فضایی شخصی به شدت ذهنی است. در این روش، زمینه های مختلف به طور جداگانه فوق ارزش گذاری می شوند و موقعیت مکانی استنباط شده در دنیای واقعی را برای شناخت ذهنی شخصی سازی شده مناسب تر می کند.
۲٫ کارهای مرتبط
۲٫۱٫ توصیف مکان مبهم و روش موقعیت یابی
۲٫۲٫ نظریه ابرارزشگذاری و کاربرد آن در جغرافیا
۳٫ توصیف مکان مکانی و مبهم بودن آن
۳٫۱٫ از شناخت فضایی تا توصیف مکان
۳٫۲٫ بیان شرح مکان
۳٫۲٫۱٫ چارچوب مرجع
۳٫۲٫۲٫ شیء فضایی
۳٫۲٫۳٫ رابطه فضایی
۳٫۳٫ ابهام چند سطحی توضیحات مکان
۳٫۳٫۱٫ مبهم بودن مفهوم شی فضایی
۳٫۳٫۲٫ ابهام در فرآیند شناخت فضایی
۳٫۳٫۳٫ ابهام افزایش یافته توسط زبان طبیعی
۴٫ مدل موقعیت یابی بر اساس معناشناسی ابرارزشیابی
۴٫۱٫ ایده های اساسی نظریه ابرارزش گرایی
- (۱)
-
پسوند و ضد اکستنشن. برخی از اقلام واژگانی مانند «جنگل»، «دور»، «نزدیک» و غیره متعلق به محمول ها هستند که در زبان طبیعی برای نشان دادن ماهیت، ویژگی ها یا رابطه بین اشیاء به کار می روند. در یک حوزه معین، مجموعه اشیایی که به طور قطع می توان به یک محمول اعمال کرد، پسوند محمول است. در مقابل، مجموعه اشیایی که نمی توان آنها را به طور قطع بر این محمول اطلاق کرد، ضد بسط است. به عنوان مثال، در حوزه «رستورانهای نزدیک سوپرمارکت»، رستوران در فاصله ۵۰۰ متری در امتداد قید «نزدیک» قرار دارد، در حالی که رستوران در فاصله ۲۰۰۰ متری در ضد بسط قید «نزدیک» قرار دارد.
- (۲)
-
نیم سایه. فراتر از بسط و ضد بسط، حالت مرزی محمول است که نیم سایه است که به شکاف های ارزش صدق نیز معروف است. وجود نیم سایه منجر به قضایای مبهم می شود که نه درست هستند و نه نادرست. از آنجایی که ابرارزشگذاری شامل شکاف حقیقت-ارزش است، اصل کلاسیک دو ارزشی برای نظریه ابرارزشگرایی نامعتبر است. به دنبال مثال قبلی، رستوران ۱۰۰۰ متر مورد مرز است، بنابراین فاصله ۱۰۰۰ متر در نیم سایه محمول “نزدیک” است.
- (۳)
-
دقت. بر اساس نظریه ابرارزش گرایی، ابهام ناشی از ناقص بودن یا عدم قطعیت معنایی محمول های مبهم است که باعث می شود جملات حاوی محمول های مبهم به روش های مختلف تفسیر شوند [ ۶۲ ].]. استفاده از عبارات دقیق تر برای توضیح هر یک از راه ها، دقیق سازی است. هدف از دقت، به حداقل رساندن و از بین بردن نیم سایه قضایای مبهم، و افزایش تدریجی دامنه گسترش و ضد گسترش محمولات برای تبدیل آنها به دقت قابل قبول است که یک روش معقول و شناختی برای دقت است. تحت هر دقت مجاز، محمولات مبهم در واقع به محمولات دقیق پالایش میشوند و جملاتی که محمولهای مبهم دارند میتوانند ارزشهایی را به روش منطق کلاسیک نسبت دهند. هدف ابرارزشگذاری فراتر رفتن از تخصیص کلاسیک است که با هر دقت مطابقت دارد.
- (۴)
-
نقطه برش. نقطه برش مفهومی مبتنی بر دقت است که برای توضیح دقت در زمینه های مختلف استفاده می شود [ ۶۳ ]]. به دنبال مثال قبلی، ۸۰۰ متر می تواند به عنوان نقطه برش استفاده شود، با رستوران های زیر ۸۰۰ متر در پسوند “نزدیک” و همه رستوران های دیگر در ضد گسترش “نزدیک” گنجانده شده اند. این نوعی دقیقسازی «نزدیک» است و نتیجه یک محمول بدون ابهام است. با انتخاب نقاط برش مختلف می توان به دقت متفاوتی از محمول مبهم دست یافت. توجه به این نکته ضروری است که مورد مرزی محمول مبهم قبلاً تعیین شده است. بنابراین، هر نقطه برش دقیق باید مناسب و قابل قبول باشد و با موارد غیرمرز مغایرت نداشته باشد. در ادامه مثال قبلی، استفاده از ۴۰۰ متر به عنوان نقطه برش برای دقت “نزدیک” مناسب نیست. زیرا این برش در محدوده شناخته شده «نزدیک» قرار دارد. در نتیجه،
۴٫۲٫ مدل موقعیت یابی تک ادعای فضایی
۴٫۲٫۱٫ چارچوب اساسی مدل موقعیت یابی
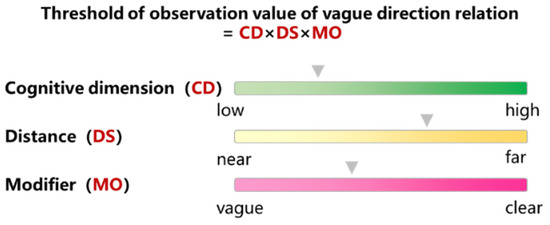
ادعای فضایی منفرد V o شامل توصیف شی مرجع Vr ، توصیف رابطه فاصله V dis و توصیف رابطه جهت V dir است. V o ترکیبی از V r ، V dis و V dir است. دقت V o مبهم به زمینه c بستگی دارد . این مدل را می توان به صورت رسمی بیان کرد:
-
مدل شیء فضایی مبهم
محمول های مبهمی که اشیاء فضایی را در توصیف مکان بیان می کنند، معمولاً نام اشیا یا آنتونومازی هستند که نشان دهنده انواع اشیاء فضایی هستند. در مقایسه با شی مورد نظر، شی مرجع باید یک شی فضایی نسبتا آشنا و معرف در میان کاربران توصیف مکان باشد. بنابراین، کاربر توصیف مکان می تواند تقریباً دامنه وجودی مکان مکانی شی مرجع را درک کند، اما به دلیل تفاوت در توانایی شناختی فضایی، توصیف شی مرجع هنوز مبهم است. دقت Vr مبهم به cr زمینه بستگی دارد . این مدل را می توان به صورت رسمی بیان کرد:
در فرمول، L محل شی مرجع r در فضای واقعی است. در توصیف مکان V از r ، زمینه c r با محمولات مبهم گنجانده شده است. تابع محدوده محدوده مکانی مکان r را نشان می دهد. وقتی مکان n ( cr ) توصیف شده در زمینه cr در محدوده r ، V ( r ، cr باشد .) درست است. با در نظر گرفتن مرجع “A mall” به عنوان مثال، قوانین اصلی برای دقت V ( r , cr ) به شرح زیر تعریف می شود :
- ۲٫
-
مدل رابطه فاصله مبهم
محمول های مبهم زیادی برای بیان رابطه فاصله در توصیف مکان وجود دارد، مانند “خیلی دور”، “نزدیک” و غیره. دقت V dis مبهم به متن c dis بستگی دارد . این مدل را می توان به صورت رسمی بیان کرد:
در فرمول، R رابطه فضایی در فضای واقعی است. در توصیف مکان V از dis ، متن c dis با محمولات مبهم گنجانده شده است. تابع val نشان دهنده فاصله بین شی مرجع و شی هدف است. هنگامی که فاصله n ( c dis ) توصیف شده در متن c dis در داخل val باشد، V ( dis , cdis ) درست است. با در نظر گرفتن فاصله “نزدیک” به عنوان مثال، قوانین اصلی برای دقت V (dis , c dis ) به صورت زیر تعریف می شوند:
- ۳٫
-
مدل رابطه جهت مبهم
همچنین محمول های مبهم زیادی در توصیف مکان وجود دارد، مانند “شرق”، “چپ” و غیره. دقت V dir مبهم به متن c dir بستگی دارد . این مدل را می توان به صورت رسمی بیان کرد:
در فرمول، R رابطه فضایی در فضای واقعی است. در توصیف مکان V از dir ، متن c dir با محمولات مبهم گنجانده شده است. تابع exp نشان دهنده جهت بین شی مرجع و شی هدف است. هنگامی که جهت n ( c dir ) توصیف شده در زمینه c dir در داخل exp باشد، V ( dir ، c dir ) درست است. با در نظر گرفتن جهت “غرب” به عنوان مثال، قوانین اصلی برای دقت V (dir , c dir ) به صورت زیر تعریف می شوند:
۴٫۲٫۲٫ محاسبه آستانه ها از مشاهدات وابسته به زمینه
-
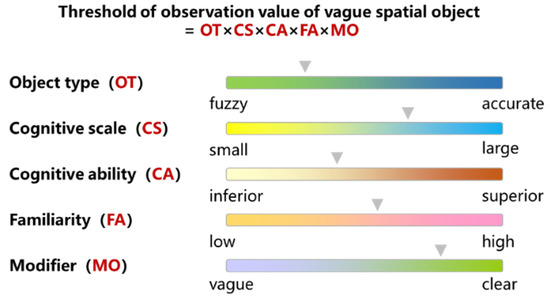
آستانه شی فضایی مبهم
تنظیم آستانه در مدل موقعیت یابی باید بر اساس نتایج مشاهدات، که به زمینه بستگی دارد، باشد. متن c ۱ = “شهر یانگژو در استان جیانگ سو”، c ۲ = “دروازه شرقی مرکز خرید که دیروز عمه به آنجا رفت” و c ۳ = “باغ وحش در برنامه سفر پسر عموی که در مدرسه ابتدایی است” را تنظیم کنید. مشاهدات متفاوت است برای اشیاء فضایی مختلف، مشاهدات به صورت زیر مرتب می شوند:
- ۲٫
-
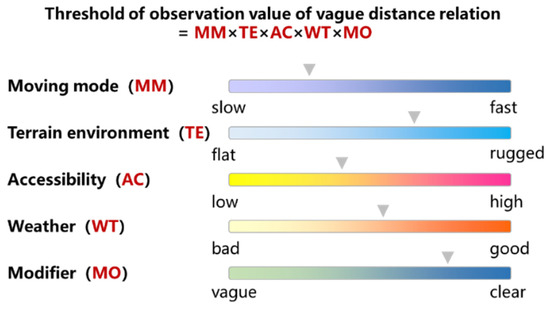
آستانه رابطه فاصله مبهم
در زمینه c1 = “۱۰ دقیقه پیاده روی”، c2 = “۵ دقیقه دویدن کامل در باران”، و c3 = “دوچرخه سواری کوتاه مدت”، تفاوت مشاهدات در روابط فاصله قابل توجه است. برای شی مرجع r و هدف o ، مشاهدات به صورت زیر مرتب می شوند:
- ۳٫
-
آستانه رابطه جهت مبهم
در زمینه c ۱ = “شرق”، c ۲ = “شمال شرقی”، و c3 = “جهت ساعت ده”، تفاوت مشاهدات در روابط جهت قابل توجه است. برای شی مرجع r و هدف o ، مشاهدات به صورت زیر مرتب می شوند:
۴٫۲٫۳٫ مقایسه آستانه بین زمینه های مختلف
- (۱)
-
برابری ( c i ≈ c j ). اگر دو زمینه c i و c j از نظر مشاهدات یکسان باشند، احتمالاً برابر هستند و به صورت c i ≈ c j ثبت می شوند. در مثال بالا، c ۲ ! ≈ c ۳ .
- (۲)
-
عمومی ( c i ⊐ c j ). پس از نادیده گرفتن مشاهدات، در صورت وجود:
( ∀ p ) ( p ∈ P ∧ ist ( p ,جj) →ist ( p ,جمن) ) ∩ ( ∀ p ) ( p ∈ P ∧ ¬ ist ( p ,جj) →¬ist ( p ,جمن) )فرمول نشان می دهد که زمینه های c i حداقل به اندازه زمینه های cj عمومی هستند ( به صورت c i ⊒ c j ثبت می شود ). اگر c i ⊒ c j اما c j ⊒ c i نداشته باشد، c i کلی تر از c j است (به صورت c i ⊐ c j ثبت می شود ). در مثال بالا، c ۲ ⊐ c ۳ . - (۳)
-
قابلیت شناسایی ( c i ≺ c j ). با در نظر گرفتن گزاره «نزدیک» به عنوان مثال، اگر همه در c i «نزدیک» باشد و در c j نیز «نزدیک» باشد، c i حداقل همان قابلیت شناسایی را دارد که c j (به صورت c i ≼ c j ثبت شده است ) . اگر c i ≼ c j اما c j ≼ c i ندارد ، c j قابلیت شناسایی قوی تری دارد (به صورت c i ≺ ثبت می شودج ج ). در مثال بالا، c ۲ ≺ c ۳ .
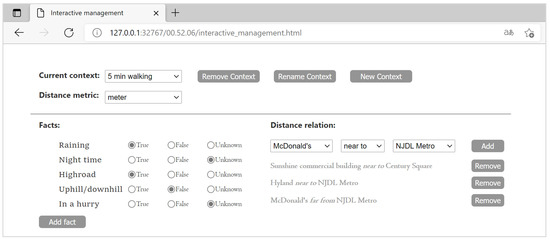
۴٫۳٫ مدل موقعیت یابی ادعای فضایی مرکب
ادعای فضایی ترکیبی V o شی هدف شامل روابط فضایی چندگانه بین شی مرجع مختلف و شی هدف است، و ادعای فضایی هر شی مرجع شامل زمینه c i است. هر c i شامل توضیحات شی مرجع V r,i , توصیف رابطه فاصله V dis,i و توصیف رابطه جهت V dir,i است. دقت های مبهم V r,i , V dis,i و V dir,i همگی به زمینه c i بستگی دارند. این مدل را می توان به صورت رسمی بیان کرد:
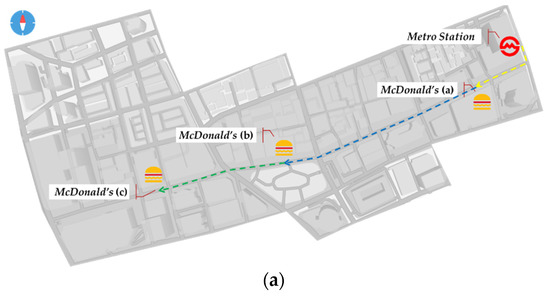
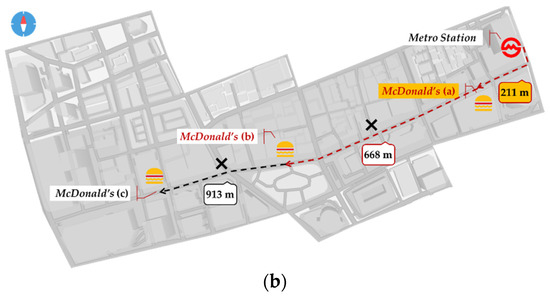
۵٫ مطالعه موردی
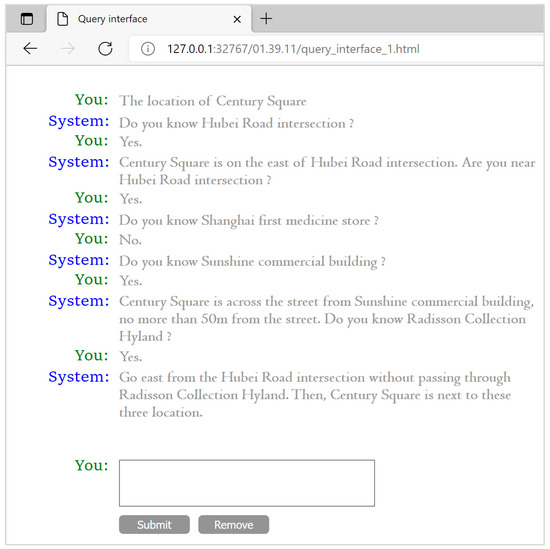
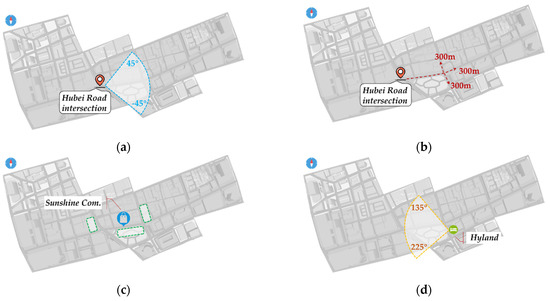
۵٫۱٫ موقعیت یابی مکان ها بر اساس ادعای فضایی واحد
۵٫۲٫ مکان یابی مکان ها بر اساس ادعای فضایی مرکب
۵٫۳٫ بحث
۶٫ نتیجه گیری
منابع
- نونیز، آر. آلن، ام. گائو، آر. ریگولی، سی. رلافورد-دویل، جی. Semenuks، A. چه اتفاقی برای علم شناختی افتاد؟ نات هوم رفتار ۲۰۱۹ ، ۳ ، ۷۸۲-۷۹۱٫ [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Cohn، AG; هزاریکا، SM بازنمایی و استدلال فضایی کیفی: مروری. سرمایه. آگاه کردن. ۲۰۰۱ ، ۴۶ ، ۱-۲۹٫ [ Google Scholar ]
- Renz, J. استدلال فضایی کیفی با اطلاعات توپولوژیکی. جی. مول. ساختار. Theochem. ۲۰۰۲ ، ۵۷۹ ، ۱۹۱-۲۰۳٫ [ Google Scholar ]
- وانگ، ی. فن، اچ. چن، آر. موقعیتیابی محلی با استفاده از فاصلهها و جهتهای شناختی. Sensors ۲۰۱۷ , ۱۷ , ۲۸۲۸٫ [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- واسردانی، م. زمستان، اس. Richter, KF تعیین مکان نام مکان ها از توضیحات مکان. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۳ ، ۲۷ ، ۲۵۰۹-۲۵۳۲٫ [ Google Scholar ] [ CrossRef ]
- ریشتر، دی. زمستان، اس. ریشتر، KF; استرلینگ، L. دانه بندی مکان های اشاره شده با توضیحات مکان. محاسبه کنید. محیط زیست شهری ۲۰۱۳ ، ۴۱ ، ۸۸-۹۹٫ [ Google Scholar ] [ CrossRef ]
- لیو، ی. گوا، کیو. ویزورک، جی. Goodchild، MF مکان یابی بر اساس ادعاهای فضایی. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۹ ، ۲۳ ، ۱۴۷۱-۱۵۰۱٫ [ Google Scholar ] [ CrossRef ]
- کریشناپورام، آر. کلر، جی.ام. Ma, Y. تحلیل کمی خواص و روابط فضایی مناطق تصویر فازی. IEEE Trans. سیستم فازی ۱۹۹۳ ، ۱ ، ۲۲۲-۲۳۳٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Ittelson، WH Environment Perception و Contemporary Perceptual Theory ; سمینار: نیویورک، نیویورک، ایالات متحده آمریکا، ۱۹۷۶; صص ۱۴۱-۱۵۴٫ [ Google Scholar ]
- بلوخ، آی. کولیوت، او. سزار، RM در رابطه فضایی سه تایی “بین”. IEEE Trans. سیستم مرد سایبرن. قسمت B ۲۰۰۶ ، ۳۶ ، ۳۱۲-۳۲۷٫ [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- تاکمورا، سی ام. سزار، آر.ام. بلوخ، I. مدل سازی و اندازه گیری رابطه فضایی “در امتداد”: مناطق، خطوط و مجموعه های فازی. تشخیص الگو ۲۰۱۲ ، ۴۵ ، ۷۵۷-۷۶۶٫ [ Google Scholar ] [ CrossRef ]
- چن، جی. جیا، اچ. لیو، دی. ژانگ، سی. ایجاد روابط جهت اصلی بر اساس جبر فاصله. در مجموعه مقالات کنفرانس بین المللی دانش، مهندسی و مدیریت، بلفاست، انگلستان، ۱-۳ سپتامبر ۲۰۱۰٫ Bi, Y., Williams, MA, Eds.; Springer: برلین/هایدلبرگ، آلمان، ۲۰۱۰٫ [ Google Scholar ]
- دو، اس. گوا، ال. وانگ، Q. مدلی برای توصیف و ترکیب روابط جهت بین مناطق همپوشانی و محدود. آگاه کردن. علمی ۲۰۰۸ ، ۱۷۸ ، ۲۹۲۸-۲۹۴۹٫ [ Google Scholar ] [ CrossRef ]
- دنگ، م. Li, Z. مدلی آماری برای روابط جهت دار بین اشیاء فضایی. Geoinformatica ۲۰۰۸ ، ۱۲ ، ۱۹۳-۲۱۷٫ [ Google Scholar ] [ CrossRef ]
- کلارامونت، سی. Thériault، M. معناشناسی فازی برای روابط جهت بین مناطق مرکب. آگاه کردن. علمی ۲۰۰۴ ، ۱۶۰ ، ۷۳-۹۰٫ [ Google Scholar ] [ CrossRef ]
- کربو، ف. کربو، ف. رویکرد فاصله ای به احاطه فازی و روابط فضایی فازی. در مجموعه مقالات کنفرانس بین المللی انجمن پردازش اطلاعات فازی آمریکای شمالی-NAFIPS، آتلانتا، GA، ایالات متحده آمریکا، ۱۳ تا ۱۵ ژوئیه ۲۰۰۰٫ [ Google Scholar ]
- پیتزی، نیوجرسی؛ Pedrycz, W. مجموعه فازی تنظیم نظری به برچسبهای کلاس مجموعه آموزشی با استفاده از معیارهای موقعیت مکانی قوی. در مجموعه مقالات کنفرانس مشترک بین المللی IEEE-INNS-ENNS در مورد شبکه های عصبی، کومو، ایتالیا، ۲۷ ژوئیه ۲۰۰۰٫ [ Google Scholar ]
- رائو، جی آر. ساراسواتی، K. مشکل مکان تاسیسات در یک شبکه تحت معیارهای چندگانه-رویکرد نظری مجموعه فازی. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۸ ، ۱۹ ، ۲۵۵۵-۲۵۵۹٫ [ Google Scholar ] [ CrossRef ]
- فاطمی، آقا؛ حبیب، م. Chowdhury, S. A Longitudinal Investigation of Residential Location: Fuzzy Logic-based Choice Set Generation and Panel Place Models انتخاب مکان. در مجموعه مقالات کنفرانس مدلسازی انتخاب بینالمللی، آستین، تگزاس، ایالات متحده آمریکا، ۱۰ تا ۱۳ مه ۲۰۱۵٫ [ Google Scholar ]
- مونتلو، DR; Goodchild، MF; گوتسگن، جی. Fohl، P. مرکز شهر کجاست؟ روشهای رفتاری برای تعیین مراجع پرس و جوهای فضایی مبهم. تف کردن شناخت. محاسبه کنید. ۲۰۰۳ ، ۳ ، ۱۸۵-۲۰۴٫ [ Google Scholar ]
- جونز، CB; Purves، RS; کلاف، PD; جوهو، اچ. مدل سازی مکان های مبهم با دانش از وب. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۸ ، ۲۲ ، ۱۰۴۵-۱۰۶۵٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چنگ، تی. مولنار، م. Lin, H. رسمی کردن اشیاء فازی از نتایج طبقه بندی نامشخص. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۱ ، ۱۵ ، ۲۷-۴۲٫ [ Google Scholar ] [ CrossRef ]
- دوبوا، دی. پراد، اچ. مجموعه ها و احتمالات فازی: سوء تفاهم ها، پل ها و شکاف ها. در مجموعه مقالات دومین کنفرانس بین المللی IEEE درباره سیستم های فازی، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، ۲۸ مارس تا ۱ آوریل ۱۹۹۳٫ [ Google Scholar ]
- پورتر، بی. ارزشگذاریهای فوقالعاده و سلسله مراتب سختگیرانه تحملپذیر. جی. فیلوس. منطق ۲۰۲۱ ، ۵۰ ، ۱-۲۰٫ [ Google Scholar ] [ CrossRef ]
- کیف، آر. مبهم: ابرارزش گرایی. فیلوس Compass ۲۰۰۸ , ۳ , ۳۱۵-۳۲۴٫ [ Google Scholar ] [ CrossRef ]
- خوب، ک. ابهام، حقیقت و منطق. Synthese ۱۹۷۵ ، ۳۰ ، ۲۶۵-۳۰۰٫ [ Google Scholar ] [ CrossRef ]
- دیتز، آر. Moruzzi, S. Supernumeration: ابهام و اعداد. در برش ها و ابرها: ابهام، ماهیت و منطق آن ؛ سیمونز، پی، اد. انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، ۲۰۱۰; ص ۴۸۲-۴۹۰٫ [ Google Scholar ]
- ورزی، ابرارزش گرایی AC و منطق های آن. ذهن ۲۰۰۷ ، ۱۱۶ ، ۶۳۳-۶۷۶٫ [ Google Scholar ] [ CrossRef ]
- مونتلو، مقیاس DR و روانشناسی های متعدد فضا. در مجموعه مقالات نظریه اطلاعات فضایی، Marciana Marina، ایتالیا، ۱۹-۲۲ سپتامبر ۱۹۹۳; Frank, AU, Campari, I., Eds. Springer: برلین/هایدلبرگ، آلمان، ۱۹۹۳٫ [ Google Scholar ]
- دو، اس. وانگ، کیو. Qing، Q. شرح فازی و استدلال ترکیبی از رابطه فضایی . انتشارات علمی: پکن، چین، ۲۰۰۷; صص ۱۵۴-۱۹۶٫ [ Google Scholar ]
- III، A. پردازش زبان طبیعی برای یک سیستم خدمات مبتنی بر مکان. جی. آکوست. Soc. صبح. ۲۰۰۸ ، ۱۲۵ ، ۱۸۴۵٫ [ Google Scholar ]
- ما، سی جی; سرویسهای مبتنی بر مکان تعاملی Fang، JY همراه با زبان طبیعی. در مجموعه مقالات کنفرانس بین المللی ارتباطات بی سیم، شبکه و محاسبات سیار، شانگهای، چین، ۲۱ تا ۲۵ سپتامبر ۲۰۰۷٫ [ Google Scholar ]
- کیائو، زی. مبهم – ابهام – عمومیت – ابهام. جی پراگمات. ۱۹۹۸ ، ۲۹ ، ۱۳-۳۱٫ [ Google Scholar ]
- گویال، RK; Egenhofer، MJ پرس و جوهای مداوم در مورد جهت های اصلی در سطوح مختلف جزئیات. در مجموعه مقالات یازدهمین کارگاه بین المللی در مورد پایگاه داده و برنامه های کاربردی سیستم های خبره، لندن، بریتانیا، ۴ تا ۸ سپتامبر ۲۰۰۰٫ [ Google Scholar ]
- دو، اس. گوا، ال. وانگ، کیو. مدل صریح مقیاس برای بررسی سازگاری جهت در دادههای فضایی با وضوح چندگانه. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۰ ، ۲۴ ، ۴۶۵-۴۸۵٫ [ Google Scholar ] [ CrossRef ]
- تانگ، ایکس. Qin, K. مدل تشابه رابطه جهت مبتنی بر درجه نزدیک فازی. در مجموعه مقالات کنفرانس بین المللی IEEE 2010 در مورد پیشرفت در انفورماتیک و محاسبات، شانگهای، چین، ۱۰ تا ۱۲ دسامبر ۲۰۱۰٫ [ Google Scholar ]
- گونگ، ی. وو، ال. لین، ی. لیو، ی. مسائل احتمالی در توصیف محلات بر اساس رابطه همسایه ورونوی. J. Vis. لنگ محاسبه کنید. ۲۰۱۲ ، ۲۳ ، ۲۱۳-۲۲۲٫ [ Google Scholar ] [ CrossRef ]
- Zadeh, LA Fuzzy sets. آگاه کردن. کنترل ۱۹۶۵ ، ۸ ، ۳۳۸-۳۵۳٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مارک، DM; Egenhofer، MJ مدلسازی روابط فضایی بین خطوط و مناطق: ترکیب مدلهای ریاضی رسمی و آزمایش موضوعات انسانی. صبح. کارتوگر. ۱۹۹۴ ، ۲۱ ، ۱۹۵-۲۱۲٫ [ Google Scholar ]
- Xu, J. رسمی کردن توصیف روابط فضایی زبان طبیعی با الگوریتم درخت تصمیم فازی. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۷ ، ۴ ، ۳۷۷-۳۹۵٫ [ Google Scholar ] [ CrossRef ]
- Xu, J. رسمی کردن توصیفات زبان طبیعی در مورد روابط فضایی بین اشیاء جغرافیایی خطی. J. Remote Sens. ۲۰۰۷ , ۲ , ۱۵۲-۱۵۸٫ [ Google Scholar ]
- خو، جی. پان، X. ژائو، جی. روش استخراج دانش رابطه فضایی فازی مبتنی بر واقعیت مجازی برای توضیحات مکان مبهم ناظر محور. ISPRS Int. J. Geo-Inf. ۲۰۲۱ ، ۱۰ ، ۸۳۳٫ [ Google Scholar ] [ CrossRef ]
- بلاشکه، تی. مرشدورف، اچ. کابررا-بارونا، پ. گائو، اس. پاپاداکیس، ای. Kovacs-Györi، A. مکان در مقابل فضا: از نقاط، خطوط و چندضلعی ها در GIS تا بازنمایی های مکان محور که بازتاب زبان و فرهنگ هستند. ISPRS Int. J. Geo-Inf. ۲۰۱۸ ، ۷ ، ۴۵۲٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، اس. ژانگ، اچ. یانگ، اچ. شناسایی منطقه عملکردی شهری یکپارچه سازی داده های جغرافیایی چند منبعی. Remote Sens. ۲۰۲۱ , ۱۳ , ۴۷۳۲٫ [ Google Scholar ] [ CrossRef ]
- ویزورک، جی. گوا، کیو. Hijmans، RJ روش نقطه-شعاع برای ارجاع جغرافیایی توصیفات محلی و محاسبه عدم قطعیت مرتبط. بین المللی جی. جئوگر. Inf. علمی ۲۰۰۴ ، ۱۸ ، ۷۴۵-۷۶۷٫ [ Google Scholar ] [ CrossRef ]
- Cohn، AG; Gotts، NM نمایش “زرده تخم مرغ” از مناطق با مرزهای نامشخص. در اشیاء جغرافیایی با مرزهای نامشخص ; Burrough, PA, Frank, A., Eds. تیلور و فرانسیس: لندن، بریتانیا، ۱۹۹۶; جلد ۲، ص ۱۷۱-۱۸۷٫ [ Google Scholar ]
- چن، جی. Shaw، SL نشان دهنده گستره فضایی مکان ها بر اساس عکس های فلیکر با تخمین چگالی هسته با وزن نمایندگی . علم اطلاعات جغرافیایی. GIScience 2016. نکات سخنرانی در علوم کامپیوتر; Miller, J., O’Sullivan, D., Wiegand, N., Eds. Springer: Cham, Switzerland, 2016; جلد ۹۹۲۷٫ [ Google Scholar ]
- باکلوند، اچ. هدبلوم، ا. Neijman، N. خوشه بندی فضایی مبتنی بر چگالی کاربرد با نویز. در دسترس آنلاین: https://weber.itn.liu.se/~aidvi/courses/06/dm/Seminars2011/DBSCAN(4).pdf (در ۱۱ نوامبر ۲۰۲۱ قابل دسترسی است).
- کونا، ای. مارتینز، ب. استفاده از طبقهبندیکنندههای یک کلاس و یادگیری هستههای چندگانه برای تعریف مناطق جغرافیایی نادقیق. بین المللی جی. جئوگر. Inf. علمی ۲۰۱۴ ، ۲۸ ، ۲۲۲۰-۲۲۴۱٫ [ Google Scholar ] [ CrossRef ]
- لیو، ک. یین، ال. لو، اف. Mou، N. تجسم و کاوش تنظیمات POI مناطق شهری در فضای معنایی نوع POI. Cities ۲۰۲۰ , ۹۹ , ۱۰۲۶۱۰٫ [ Google Scholar ] [ CrossRef ]
- Mehlberg, H. Book Reviews: The Reach of Science. Science ۱۹۵۸ , ۱۲۸ , ۱۰۷۸-۱۰۷۹٫ [ Google Scholar ]
- Van Fraassen، B. اصطلاحات مفرد، شکاف های حقیقت-ارزش، و منطق آزاد. جی. فیلوس. ۱۹۶۶ ، ۶۳ ، ۴۸۱-۴۹۵٫ [ Google Scholar ] [ CrossRef ]
- موررو، ام. اشیاء مبهم چگونه هستند. جی. فیلوس. ۲۰۰۲ ، ۹۹ ، ۳۳۳-۳۶۱٫ [ Google Scholar ] [ CrossRef ]
- Kulik, L. استدلال فضایی مبهم مبتنی بر ارزش گذاری. Geogr. ژئو گراف دامنه. Inf. سیستم ۲۰۰۰ ، ۱۹ ، ۷۳-۸۰٫ [ Google Scholar ]
- مینوک، ام. Mollevik، J. “نزدیک” و “دور” وابسته به زمینه در پایگاه داده های فضایی از طریق ابرارزش گذاری. دانستن داده ها مهندس ۲۰۱۳ ، ۸۶ ، ۲۹۵-۳۰۵٫ [ Google Scholar ] [ CrossRef ]
- Kulik, L. یک نظریه هندسی مرزهای مبهم بر اساس ابرارزش گذاری. در مجموعه مقالات کنفرانس بین المللی در نظریه اطلاعات فضایی، Morro Bay، CA، ایالات متحده آمریکا، ۱۹-۲۳ سپتامبر ۲۰۰۱; Montello، DR، Ed. Springer: برلین/هایدلبرگ، آلمان، ۲۰۰۱٫ [ Google Scholar ]
- بنت، ب. کاربرد معناشناسی ابرارزشگذاری در مفاهیم فضایی با تعریف مبهم. در مجموعه مقالات کنفرانس بین المللی در نظریه اطلاعات فضایی، Morro Bay، CA، ایالات متحده آمریکا، ۱۹-۲۳ سپتامبر ۲۰۰۱; Montello، DR، Ed. Springer: برلین/هایدلبرگ، آلمان، ۲۰۰۱٫ [ Google Scholar ]
- رودریگز، ای جی; سانتوس، PE; لوپس، ام. بنت، بی. Oppenheimer، PE Standpoint معناشناسی برای چندمعنی در حروف اضافه فضایی. J. Log. محاسبه کنید. ۲۰۲۰ ، ۳۰ ، ۶۳۵-۶۶۱٫ [ Google Scholar ] [ CrossRef ]
- سانتوس، پی. بنت، بی. Sakellariou، G. معانی ابرارزش برای یک هستی شناسی ویژگی آب داخلی. در مجموعه مقالات نوزدهمین کنفرانس بین المللی مشترک هوش مصنوعی، ادینبورگ، بریتانیا، ۳۰ ژوئیه تا ۵ اوت ۲۰۰۵٫ [ Google Scholar ]
- بولوتین، الف. ابرارزش گرایی کوانتومی. جی. ریاضی. فیزیک ۲۰۱۷ ، ۵۸ ، ۱۲۲۱۰۶٫ [ Google Scholar ] [ CrossRef ]
- بل، اس. شناخت و مقیاس فضایی: دیدگاه کودک. جی. محیط زیست. روانی ۲۰۰۲ ، ۲۲ ، ۹-۲۷٫ [ Google Scholar ] [ CrossRef ]
- لی، ال. لین، سی. منطق توصیف ابرارزشگذاری معین برای توصیف مفاهیم مبهم: معناشناسی آن و الگوریتم تابلویی برای آن. ورود به سیستم J. IGPL ۲۰۰۶ ، ۱۴ ، ۸۷۳-۸۸۸٫ [ Google Scholar ]
- Rohrs, B. محتوای پیشنهادی فوق ارزشی. Synthese ۲۰۱۶ ، ۱۹۴ ، ۲۱۸۵-۲۲۰۱٫ [ Google Scholar ] [ CrossRef ]
- Bencivenga، E. ارزیابی ها و نظریه ها. گریزر فیلوس. گل میخ. ۱۹۸۴ ، ۲۱ ، ۸۹-۹۸٫ [ Google Scholar ]
- Minock، MJ روابط مبهم در پایگاه داده های فضایی. در مجموعه مقالات کنفرانس بین المللی کاربرد زبان طبیعی در سیستم های اطلاعاتی، کاردیف، انگلستان، ۲۳ تا ۲۵ ژوئن ۲۰۱۰٫ [ Google Scholar ]
- Straccia، U. به سوی استدلال فضایی در منطق های توصیف فازی. در مجموعه مقالات کنفرانس بین المللی IEEE 2009 در مورد سیستم های فازی، ججو، کره، ۲۰-۲۴ اوت ۲۰۰۹٫ ص ۵۱۲-۵۱۷٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ادو-آلوو، ای. بیمونته، اس. پینت، اف. Bédard، Y. بهرهبرداری از ابهام فضایی در فضایی OLAP: به سوی یک رویکرد طراحی جدید هیبریدی آگاه از ریسک. در مجموعه مقالات شانزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، لوون، بلژیک، ۱۴ تا ۱۷ مه ۲۰۱۳٫ [ Google Scholar ]
- دیلو، ا. de By, RA; Stein، A. متریک برای اجسام فضایی مبهم بر اساس مفهوم جرم. در مجموعه مقالات کنفرانس بین المللی سیستم های فازی IEEE 2007، لندن، انگلستان، ۲۳ تا ۲۶ ژوئیه ۲۰۰۷٫ صص ۱-۶٫ [ Google Scholar ] [ CrossRef ]
- چنگ، تی. فیشر، پی. لی، زی. ابهام مضاعف: تأثیر مقیاس بر مدلسازی اجسام فضایی فازی. در تحولات در مدیریت داده های مکانی ; فیشر، پی، اد. Springer: برلین/هایدلبرگ، آلمان، ۲۰۰۵; جلد ۱، ص ۲۹۹-۳۱۳٫ [ Google Scholar ]
- خو، جی. Pan, X. مدل استخراج منطقه فضایی فازی برای توصیف مکان مبهم شی از دیدگاه ناظر. ISPRS Int. J. Geo-Inf. ۲۰۲۰ ، ۹ ، ۷۰۳٫ [ Google Scholar ] [ CrossRef ]
- ژو، سی. وانگ، اچ. وانگ، سی. هو، ز. ژنگ، ز. شن، اس. چنگ، کیو. فنگ، ز. وانگ، ایکس. Lv، H.; و همکاران نمودار دانش زمینشناسی در عصر کلان داده علمی علوم زمین چین ۲۰۲۱ ، ۶۴ ، ۱۱۰۵-۱۱۱۴٫ [ Google Scholar ] [ CrossRef ]


بدون دیدگاه