
کلید واژه ها:
بلاک چین ؛ قرارداد هوشمند ؛ موقعیت یابی GPS ؛ یکپارچگی داده ها ؛ قابلیت اطمینان داده ها
۱٫ مقدمه
۲٫ پس زمینه
۲٫۱٫ موقعیت یابی GPS
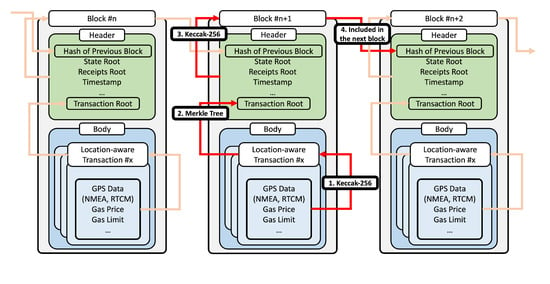
۲٫۲٫ بلاک چین
۳٫ سیستم موقعیت یابی جهانی مبتنی بر بلاک چین
در فرآیند بررسی اولیه GPS، الگوریتم ۲ که مقدار دهی اولیه دستگاه را برای بررسی و اتصال با سرور NTRIP انجام می دهد، یک بار راه اندازی می شود و الگوریتم ۳ که اطلاعات RTCM را دریافت و تصحیح می کند و اطلاعات NMEA را مجددا ارسال می کند، برای زمان مشخصی تکرار می شود. . در این مطالعه، الگوریتم ۱، یک قرارداد هوشمند که بر روی اتریوم کار می کند، اضافه شد. اتصال شبکه اتریوم و توزیع قرارداد هوشمند که یک بار در الگوریتم ۱ انجام می شود، در الگوریتم ۲ اجرا می شود و ثبت داده ها در بلاک چین از طریق اجرای قرارداد هوشمند در الگوریتم ۳ اجرا می شود. بر این اساس، تمام داده ها توسط GPS تولید و استفاده می شود. دستگاه ها در شبکه اتریوم ضبط می شوند و یکپارچگی آن ایمن است.
| الگوریتم ۱: قرارداد هوشمند: نقشه بردار، NMEA، RTCM را تضمین یا برگردانید. |
 |
الگوریتم ۱ برای وارد کردن آدرس نقشه بردار در هنگام استقرار قرارداد که آدرس کیف پول کاربر را ذخیره می کند، هنگام استقرار یک قرارداد هوشمند ساخته شده است. الگوریتم ۱-۱ (اولین عملکرد برای موقعیت یابی GPS) NMEA و RTCM را ذخیره می کند و الگوریتم ۱-۲ اطلاعات اپراتور و GPS را می خواند. به عنوان الگوریتم ۱-۲ (عملکرد دوم برای برگرداندن داده) تعریف شده است. در مورد ساختار، ناحیه ای است که همراه با توزیع قرارداد هوشمند اجرا می شود و به محض اجرای الگوریتم ۱ آدرس کیف پول کاربر به طور خودکار ذخیره می شود. الگوریتم ۱-۱ داده ها را از الگوریتم ۴ دریافت می کند و آنها را به عنوان انواع داده ذخیره می کند. متعاقباً، اطلاعات GPS و کارگران ذخیره شده در این قرارداد را می توان با الگوریتم های ۱ و ۲ بررسی کرد. اگرچه ساختار الگوریتم ۳ ساده است. این یک کد قرارداد هوشمند است که در Solidity نوشته شده و در شبکه اتریوم کار می کند. یعنی یکپارچگی داده های GPS و اطلاعات اپراتور ذخیره شده در الگوریتم ۲ توسط اتریوم تضمین شده است.
| الگوریتم ۲: به گیرنده GPS و کستر NTRIP متصل شوید. |
 |
الگوریتم ۲ اجرا و اتصال سنسور را با استفاده از ارتباط سریال برای موقعیت یابی GPS آغاز می کند. تنظیم شده است که انواع مختلف اطلاعات را از طریق اتصال و ارتباط با ماهواره همزمان با کار دستگاه دریافت کند، بنابراین موقعیت یابی GPS شروع می شود. متعاقبا، برای اتصال با سرور NTRIP، اطلاعات ورودی ورودی برای ایجاد مشتری NTRIP استفاده می شود. در این مطالعه از نقطه اتصال VRS_V32 سرور NGIS استفاده شد. پس از آن، GNGGA از اطلاعات اندازه گیری شده توسط موقعیت یابی از دستگاه خوانده شد و از طریق سرویس گیرنده NTRIP به سرور منتقل شد تا اتصال اولیه انجام شود. این یک فرآیند کلی موقعیت یابی GPS است. در این مطالعه، اتصال شبکه اتریوم و اجرای الگوریتم ۱-۱ اضافه شد.
| الگوریتم ۳: به بلاک چین اتریوم متصل شوید و قرارداد هوشمند را اجرا کنید. |
 |
NMEA و RTCM تولید شده در فرآیند موقعیت یابی از طریق الگوریتم ۱ در بلاک چین اتریوم ثبت شدند. با این حال، این مستلزم آن است که دستگاه به شبکه اتریوم متصل باشد و یک قرارداد هوشمند را مستقر کند. این الگوریتم این کار را مدیریت می کند. برای دستیابی به اثبات مفهوم، آدرس URL شبکه آزمایشی را وارد کردیم. علاوه بر این، آدرس کیف پول و کلید خصوصی برای اجرای قرارداد هوشمند وارد شد. پس از آن، اتصال به شبکه از طریق ارائه دهنده HTTP برقرار شد و یک نمونه Web3 ایجاد شد. سپس قرارداد با استفاده از ABI و بایت کد استخراج شده از نمونه Web3 و کد Solidity کامپایل شده (الگوریتم ۳) مستقر شد. از طریق آدرس قرارداد هوشمند مستقر شده، کاربر (نقشه انداز) را می توان شناسایی کرد و اطلاعات GPS را می توان ردیابی کرد. پس از استقرار، رسید معامله برگشت داده شد که تأیید می کرد که قرارداد به درستی توزیع شده است. تنها با استفاده از آدرس تراکنش انجام شده در این فرآیند، اطلاعات اپراتور و GPS که یکپارچگی آنها در الگوریتم ۳ ایمن شده است قابل بررسی است.
| الگوریتم ۴: موقعیت یابی GPS. |
 |
۴٫ نتیجه
۴٫۱٫ نتایج پیاده سازی
۴٫۲٫ تجزیه و تحلیل امنیتی
۴٫۳٫ تجزیه و تحلیل هزینه
۵٫ بحث و نتیجه گیری
- لی، ایکس. جی، م. دای، ایکس. رن، ایکس. فریچه، ام. ویکرت، جی. Schuh، H. دقت و قابلیت اطمینان موقعیت یابی دقیق در زمان واقعی چند GPS: GPS، GLONASS، BeiDou و Galileo. جی. جئود. ۲۰۱۵ ، ۸۹ ، ۶۰۷-۶۳۵٫ [ Google Scholar ] [ CrossRef ]
- کواک، جی. Sung، Y. کنترل پرواز پهپاد مستقل برای ناوبری مبتنی بر GPS. IEEE Access ۲۰۱۸ ، ۶ ، ۳۷۹۴۷–۳۷۹۵۵٫ [ Google Scholar ] [ CrossRef ]
- منگ، ایکس. وانگ، اچ. لیو، بی. یک رویکرد محلی سازی قوی وسیله نقلیه مبتنی بر همجوشی حسگر gnss/imu/dmi/lidar برای وسایل نقلیه خودمختار. Sensors ۲۰۱۷ , ۱۷ , ۲۱۴۰٫ [ Google Scholar ] [ CrossRef ] [ PubMed ]
- دی میگل، ام. گارسیا، اف. Armingol، JM محلی سازی احتمالی LiDAR را برای وسایل نقلیه خودران با استفاده از GNSS بهبود بخشید. Sensors ۲۰۲۰ , ۲۰ , ۳۱۴۵٫ [ Google Scholar ] [ CrossRef ]
- واکر، WJ; ون در مولن، پی. لمن، سی. ثبت زمین و کاداستر در هلند، و نقش مرزهای کاداستر: کاربرد فناوری GPS در بررسی مرزهای کاداستر. J. Geospat. مهندس ۲۰۰۳ ، ۵ ، ۳-۱۰٫ [ Google Scholar ]
- Kavaliauskas، P. ژیداناویچیوس، دی. Jurelionis، A. دقت هندسی استفاده از مش واقعیت سه بعدی برای گردش کار تخمین کمیت کار زمینی مبتنی بر BIM. ISPRS Int. J. Geo-Inf. ۲۰۲۱ ، ۱۰ ، ۳۹۹٫ [ Google Scholar ] [ CrossRef ]
- عابدین، HZ; هارون، تی اس؛ Adiyanto، FH; آندریاس، اچ. گومیلار، آی. مودیتا، آی. Soemarto، I. در مورد ایجاد و اجرای GPS CORS برای نقشه برداری و نقشه برداری کاداستر در اندونزی. Surv. Rev. ۲۰۱۵ , ۴۷ , ۶۱-۷۰٫ [ Google Scholar ] [ CrossRef ]
- فوتوپولوس، جی. Cannon, ME مروری بر روش های ایستگاه چند مرجع برای موقعیت یابی در سطح سانتی متر. راه حل GPS. ۲۰۰۱ ، ۴ ، ۱-۱۰٫ [ Google Scholar ] [ CrossRef ]
- Bar-Sever، Y.; بل، بی. دورسی، ا. Srinivasan, J. کاربردهای فضایی سیستم GPS دیفرانسیل جهانی ناسا . گزارش های فنی Jpl; موسسه ناوبری: پورتلند، OR، ایالات متحده آمریکا، ۲۰۰۳٫
- کانکر، آر اس؛ العرینی، م.ب. هگارتی، سی جی; Hsiao، T. مدلسازی اثرات سوسوزن یونوسفر بر در دسترس بودن سیستم تقویت مبتنی بر GPS/ماهواره. علوم رادیویی ۲۰۰۳ ، ۳۸ ، ۱-۱-۱-۲۳٫ [ Google Scholar ] [ CrossRef ]
- هرناندز-پاجارس، م. Juan، JM; سانز، جی. اروس، آر. گارسیا رودریگز، آ. LColombo، O. سینماتیک زمان واقعی منطقه وسیع با سیگنالهای گالیله و GPS. در مجموعه مقالات هفدهمین نشست فنی بین المللی بخش ماهواره موسسه ناوبری، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، ۲۱ تا ۲۴ سپتامبر ۲۰۰۴٫ صص ۲۵۴۱-۲۵۵۴٫ [ Google Scholar ]
- وابنا، جی. اشمیتز، ام. Bagge، A. PPP-RTK: موقعیت یابی دقیق نقطه با استفاده از نمایش فضای حالت در شبکه های RTK. در مجموعه مقالات هجدهمین نشست فنی بین المللی بخش ماهواره موسسه ناوبری، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، ۱۳ تا ۱۶ سپتامبر ۲۰۰۵٫ صص ۲۵۸۴-۲۵۹۴٫ [ Google Scholar ]
- اسنای، RA; Soler, T. ایستگاه مرجع کار مداوم (CORS): تاریخچه، برنامهها و پیشرفتهای آینده. J. Surv. مهندس ۲۰۰۸ ، ۱۳۴ ، ۹۵-۱۰۴٫ [ Google Scholar ] [ CrossRef ]
- اقبال، MU; لیم، اس. مفاهیم حقوقی و اخلاقی آسیبپذیریهای GPS. J. Law Inf. تکنولوژی ۲۰۰۸ ، ۳ ، ۱۷۸٫ [ Google Scholar ]
- سامیوس، م. اوانجلیدیس، CP; Serrelis، E. ارزیابی آسیبپذیریهای امنیت اطلاعات در تجهیزات لرزهشناسی مشترک. سیسمول. Soc. صبح. ۲۰۲۱ ، ۹۲ ، ۹۳۳-۹۴۰٫ [ Google Scholar ] [ CrossRef ]
- کوالسکی، م. لی، ZW; چان، فناوری بلاک چین TK و روابط اعتماد در امور مالی تجارت. تکنولوژی پیش بینی. Soc. چانگ. ۲۰۲۱ ، ۱۶۶ ، ۱۲۰۶۴۱٫ [ Google Scholar ] [ CrossRef ]
- مجید، یو. خان، لو. یعقوب، ط. کاظمی، س. صلاح، ک. هنگ، بلاک چین CS برای شهرهای هوشمند مبتنی بر اینترنت اشیا: پیشرفتهای اخیر، الزامات و چالشهای آینده. J. Netw. محاسبه کنید. Appl. ۲۰۲۱ ، ۱۸۱ ، ۱۰۳۰۰۷٫ [ Google Scholar ] [ CrossRef ]
- لی، سی. فو، ی. یو، FR; لوان، تی. Zhang, Y. تصحیح موقعیت خودرو: چارچوب اشتراکگذاری خطای GPS مبتنی بر شبکههای بلاک چین. IEEE Trans. هوشمند ترانسپ سیستم ۲۰۲۰ ، ۲۲ ، ۸۹۸–۹۱۲٫ [ Google Scholar ] [ CrossRef ]
- لی، HC توسعه الگوریتم موقعیت یابی دقیق GNSS بر اساس پیام های CLAS بلادرنگ ارائه شده توسط QZSS. پایان نامه کارشناسی ارشد، دانشگاه اینها، اینچئون، کره، ۲۰۲۱٫ [ Google Scholar ]
- انصاری، ک. موقعیتیابی بلادرنگ بر اساس فیلتر کالمن و استلزام تحلیل طیف منفرد. IEEE Geosci. سنسور از راه دور Lett. ۲۰۲۱ ، ۱۸ ، ۵۸-۶۱٫ [ Google Scholar ] [ CrossRef ]
- گزارش دستاورد موسسه اطلاعات نشنال جئوگرافیک ; موسسه ملی اطلاعات جغرافیایی، وزارت زمین، زیرساخت و حمل و نقل: سوون، کره، ۲۰۱۷٫
- ووبنا، جی. باگ، ا. Schmitz، M. تکنیک های مبتنی بر شبکه برای برنامه های کاربردی RTK. در مجموعه مقالات سمپوزیوم GPS، GPS JIN، توکیو، ژاپن، ۱۴-۱۶ نوامبر ۲۰۰۱٫ [ Google Scholar ]
- سوک، HW; پارک، کی دی. کیم، YG; Lee, HC Accuracy Evaluation of Multi-GNSS Network-RTK Surveys که توسط موسسه اطلاعات جغرافیایی ملی انجام می شود. در مجموعه مقالات کنفرانس IPNT، Yeosu، کره، ۱۱-۱۳ نوامبر ۲۰۲۰٫ [ Google Scholar ]
- Nakamoto، S. Bitcoin: یک سیستم نقدی الکترونیکی همتا به همتا. ۲۰۰۸٫ در دسترس آنلاین: https://bitcoin.org/bitcoin.pdf (در ۲۳ نوامبر ۲۰۲۱ قابل دسترسی است).
- ویریاسیتاوات، دبلیو. دا خو، ال. بی، ز. Sapsomboon، A. چارچوب مدیریت فرآیند کسب و کار مبتنی بر بلاک چین (BPM) برای ترکیب خدمات در صنعت ۴٫۰٫ جی. اینتل. Manuf. ۲۰۲۰ ، ۳۱ ، ۱۷۳۷-۱۷۴۸٫ [ Google Scholar ] [ CrossRef ]
- داشکویچ، ن. کانسل، اس. Destefanis، G. برنامه بلاک چین برای بانک های مرکزی: یک مطالعه نقشه برداری سیستماتیک. دسترسی IEEE ۲۰۲۰ ، ۸ ، ۱۳۹۹۱۸–۱۳۹۹۵۲٫ [ Google Scholar ] [ CrossRef ]
- ووست، ک. Gervais, A. آیا به بلاک چین نیاز دارید؟ در مجموعه مقالات کنفرانس Crypto Valley 2018 در مورد فناوری بلاک چین، زوگ، سوئیس، ۲۰ تا ۲۲ ژوئن ۲۰۱۸؛ صص ۴۵-۵۴٫ [ Google Scholar ]
- وود، جی اتریوم: یک دفتر کل تراکنش های غیرمتمرکز امن. کاغذ زرد پروژه اتریوم ۲۰۱۴٫ در دسترس آنلاین: https://ethereum.github.io/yellowpaper/paper.pdf (در ۲۳ نوامبر ۲۰۲۱ قابل دسترسی است).
- اندرولاکی، ای. بارگر، ا. بورتنیکوف، وی. کاچین، سی. کریستیدیس، ک. دی کارو، ا. پارچه Yellick, J. Hyperledger: یک سیستم عامل توزیع شده برای بلاک چین های مجاز. در مجموعه مقالات سیزدهمین کنفرانس یوروسیس، پورتو، پرتغال، ۲۳ تا ۲۶ آوریل ۲۰۱۸؛ صص ۱-۱۵٫ [ Google Scholar ]
- کسلر، بی. آسیب پذیری تأسیسات هسته ای در برابر حملات سایبری. بینش استراتژیک: بهار ۲۰۱۰٫ استراتژی . بینش ۲۰۱۱ ، ۱۰ ، ۱۵-۲۵٫ [ Google Scholar ]
- یانگ، کیو. آن، دی. Min، R. یو، دبلیو. یانگ، ایکس. ژائو، دبلیو. درباره دفاع بهینه مبتنی بر قرارگیری PMU در برابر حملات یکپارچگی داده در شبکه هوشمند. IEEE Trans. Inf. پزشکی قانونی امن. ۲۰۱۷ ، ۱۲ ، ۱۷۳۵-۱۷۵۰٫ [ Google Scholar ] [ CrossRef ]
- مالان، دی جی; ولز، ام. اسمیت، MD یک زیرساخت کلید عمومی برای توزیع کلید در TinyOS بر اساس رمزنگاری منحنی بیضوی. در مجموعه مقالات اولین کنفرانس سالانه انجمن ارتباطات IEEE در سال ۲۰۰۴ در مورد ارتباطات و شبکه های حسگر و موقت، سانتا کلارا، کالیفرنیا، ایالات متحده آمریکا، ۴ تا ۷ اکتبر ۲۰۰۴٫ جلد ۲۷، ص ۷۱–۸۰٫ [ Google Scholar ]
- قائب، ج.ا. اسمادی، م. Chebil, J. تضمین یکپارچگی داده با عملکرد بالا بر اساس تکنیک تعیین کننده. ژنرال آینده. محاسبه کنید. سیستم ۲۰۱۱ ، ۲۷ ، ۶۱۴-۶۱۹٫ [ Google Scholar ] [ CrossRef ]
- هوانگ، پی. فن، ک. یانگ، اچ. ژانگ، ک. لی، اچ. Yang, Y. یک بلاک چین حسابرسی مشترک برای یکپارچگی داده های قابل اعتماد در سیستم ذخیره سازی ابری. دسترسی IEEE ۲۰۲۰ ، ۸ ، ۹۴۷۸۰–۹۴۷۹۴٫ [ Google Scholar ] [ CrossRef ]
- ژائو، کیو. چن، اس. لیو، ز. بیکر، تی. Zhang, Y. طرح بررسی یکپارچگی داده از راه دور مبتنی بر بلاک چین برای سیستم های اطلاعات اینترنت اشیا. Inf. روند. مدیریت ۲۰۲۰ , ۵۷ , ۱۰۲۳۵۵٫ [ Google Scholar ] [ CrossRef ]
- هنگ، ال. کیم، دی اچ طراحی و پیاده سازی یک پلت فرم یکپارچه بلاک چین iot برای سنجش یکپارچگی داده ها. Sensors ۲۰۱۹ , ۱۹ , ۲۲۲۸٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وی، پی. وانگ، دی. ژائو، ی. Tyagi، SKS؛ کومار، N. مکانیسم حفاظت از یکپارچگی داده های ابری مبتنی بر داده های بلاک چین. ژنرال آینده. محاسبه کنید. سیستم ۲۰۲۰ ، ۱۰۲ ، ۲۲۲۸٫ [ Google Scholar ] [ CrossRef ]
- چوی، MK; یون، سی. Seong، PH یک سیستم نظارتی جدید برای یکپارچگی داده سیستم حفاظت از راکتور با استفاده از فناوری بلاک چین. دسترسی IEEE ۲۰۲۰ ، ۸ ، ۱۱۸۷۳۲–۱۱۸۷۴۰٫ [ Google Scholar ] [ CrossRef ]
- آهنگ، ی. فو، ی. یو، FR; ژو، ال. اینترنت وسایل نقلیه مجهز به بلاک چین با موقعیت یابی مشارکتی: رویکرد شبکه عصبی عمیق. IEEE Internet Things J. ۲۰۲۰ , ۷ , ۳۴۸۵–۳۴۹۸٫ [ Google Scholar ] [ CrossRef ]
- محمود، ع. صدیقی، س. شنگ، QZ; ژانگ، ما؛ سوزوکی، اچ. Ni, W. Trust on wheels: به سوی شبکه های IoV ایمن و کارآمد در منابع. محاسبات ۲۰۲۲ ، ۱-۲۲٫ [ Google Scholar ] [ CrossRef ]
- شارما، وی. یک مدل تراکنش با انرژی کارآمد برای اینترنت وسایل نقلیه مجهز به بلاک چین (IoV). IEEE Commun. Lett. ۲۰۲۲ ، ۲۳ ، ۲۴۶-۲۴۹٫ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سعید، س. مارکو گیسبرت، اچ. ارزیابی اجماع بلاک چین و مکانیسم های امنیتی در برابر حمله ۵۱ درصدی. Appl. علمی ۲۰۱۹ ، ۹ ، ۱۷۸۸۹٫ [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- یو بلوکس ZED-F9P-02B. ماژول GNSS با دقت بالا U-Blox F9. برگه داده. ۲۰۲۱٫ در دسترس آنلاین: Https://www.u-blox.com/sites/default/files/ZED-F9P-04B_DataSheet_UBX-21044850.pdf (در ۲ فوریه ۲۰۲۲ قابل دسترسی است).












بدون دیدگاه